Расчет корректирующего устройства системы автоматического управления
Задание и исходные данные
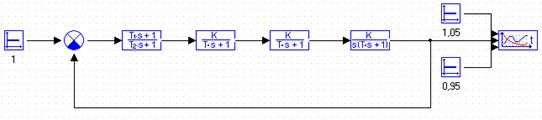
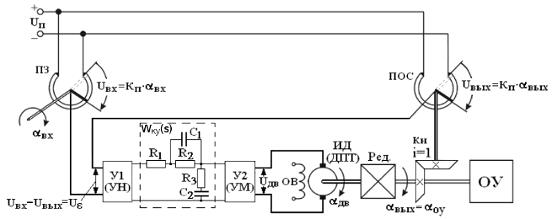
Используя функциональную схему (ФС)
автоматической системы (рис. 1) составить структурную схему по исходным данным.
По заданным параметрам построить ЛАЧХ исходной
разомкнутой системы.
В соответствии с рекомендациями [1] построить
асимптотическую ЛАЧХ желаемой системы первого приближения и записать ее
передаточную функцию.
Методом математического моделирования, используя
программный комплекс МВТУ, проверить соответствие желаемой системы управления
требуемым показателям качества.
Построить асимптотическую ЛАЧХ
нескорректированной системы.
Получить ЛАЧХ корректирующего устройства, по
которой выбрать схему его технической реализации.
Составить принципиальную электрическую схему
системы управления с включенным в нее корректирующим устройством.
автоматический управление
нескорректированный частотный
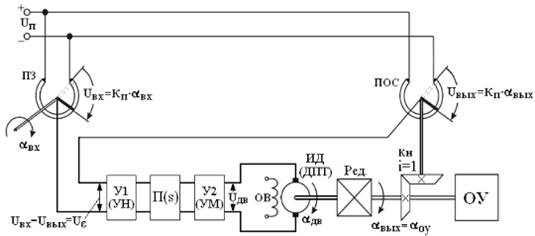
Рисунок 1.
Функциональная схема автоматической системы управления объектом
Описание узлов и их параметров, входящих в
состав ФС:
ПЗ - потенциометр задатчика;
αвх - угол поворота
вала ПЗ;
ПОС - потенциометр обратной связи;
αoy = αвых - угол поворота
объекта управления;
У1 - усилитель напряжения (УН);
П(s) - последовательное корректирующее
устройство (КУ);
У2 - усилитель мощности (УМ);
ИД - исполнительный двигатель;
ОВ - обмотка возбуждения;
Ред - редуктор;
Кн - коническая передача с коэффициентом
передачи 1;
ОУ - объект управления;п - напряжение источников
питания потенциометров.
Таблица исходных данных согласно варианту:
|
Требования,
предъявляемые к скорректированной системе управления
|
|
Вариант
|
Максимальные
параметры
|
Требуемые
показатели качества регулирования
|
|
α'вых, рад/с
|
α''вых,
рад/с2
|
Установившаяся
ошибка, ε∙10-3,
рад ≤
|
Показатель
перерегулирования, σ,
% ≤
|
Время
регулирования, tp, c
|
|
3
|
1,25
|
0,6
|
3,5
|
30
|
0,4
|
|
Параметры
элементов исходной системы управления
|
|
№
Вар.
|
Кп,
В/рад
|
Kу
|
Kдв,
рад/Вс
|
Kp
|
Постоянные
времени, с
|
|
|
|
|
|
Tу
|
Tм
|
Tэ
|
|
3
|
2
|
200
|
3.0
|
0,002
|
0,0008
|
0,04
|
0,006
|
Структурная схема исходной САУ и ее параметры
На основании функциональной схемы исходной САУ
можно получит ее структурную схему с математическим описанием ее звеньев.
Структура исходной САУ изображена на рисунке 2.
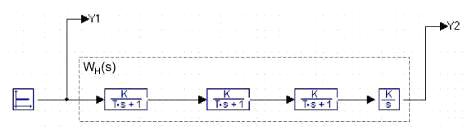
Передаточные функции усилителя и исполнительного
двигателя постоянного тока имеют вид:
Выполнив структурные преобразования
базовой структуры, получим результирующую структурную схему системы с единичным
коэффициентом передачи в канале ООС, которая изображена на рисунке 3.
На основании структуры рисунка 3 запишем
передаточную функцию исходной САУ для разомкнутого состояния:

Асимптотическая ЛАЧХ исходной САУ в
разомкнутом состоянии
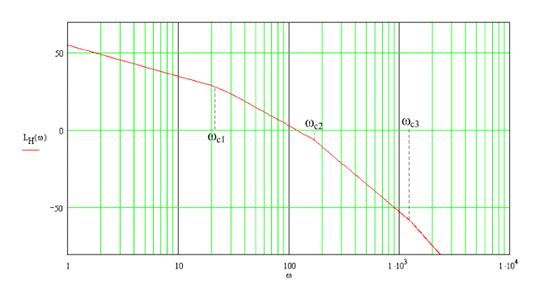
Согласно полученному выражению
передаточной функции исходной САУ в разомкнутом состоянии, запишем выражение ее
асимптотической ЛАЧХ:

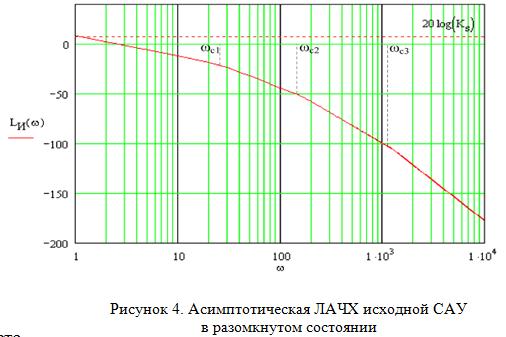
Участок ЛАЧХ в диапазоне 0÷ωс1 имеет
наклон -20 дб/дек, в диапазоне ωс1÷ωс2 - -40
дб/дек, в диапазоне ωс2÷ωс3 - -60
дб/дек и в диапазоне ωс3÷∞ -
-80 дб/дек.
Сопрягающие частоты асимптотической
ЛАЧХ равны:
Расчет и построение запрещенной
области
По заданным максимальной скорости и
ускорению движения системы определяем рабочую частоту:
амплитуду эквивалентного
гармонического воздействия:
и минимальный требуемый коэффициент
передачи системы на рабочей частоте:
Граница запретной зоны может быть
построена согласно выражению:

и состоит из двух участков: -20
дб/дек в диапазоне 0÷ωраб и -40
дб/дек в области высоких частот. Запретная зона для желаемой ЛАХЧ будет
располагаться ниже этой кривой и отмечена штриховкой на рисунке 5.
Расчет дополнительного коэффициента
усиления
Для обеспечения необходимой точности
скорректированной системы необходимо увеличить на 3÷4 дБ
рассчитанное ранее значение коэффициента передачи на рабочей частоте (57,43
дБ). В результате рабочая точка будет иметь амплитуду  и
принадлежать желаемой ЛАЧХ.
и
принадлежать желаемой ЛАЧХ.
Поскольку исходная САУ обладает
астатизмом первого порядка, то через рабочую точку на желаемой ЛАЧХ проходит
низкочастотная асимптота с наклоном -20 дб/дек. На пересечении этой линии с
осью амплитуд на частоте 1 с-1 отмечаем коэффициент передачи желаемой ЛАЧХ,
равный 55,06 дБ, а в безразмерных единицах 566,03.
Так как коэффициент передачи
исходной системы не обеспечивает требуемой точности (KИ < Kж), то необходимо
определить дополнительный коэффициент усиления:

Асимптотическая ЛАЧХ
нескорректированной САУ с дополнительным коэффициентом усиления в разомкнутом
состоянии
Передаточная функция
нескорректированной САУ с дополнительным коэффициентом в разомкнутом состоянии
будет иметь вид:

По передаточной функции
нескорректированной САУ в разомкнутом состоянии получим выражение
асимптотической ЛАЧХ последней в следующем виде:

График асимптотической ЛАЧХ нескорректированной
САУ в разомкнутом состоянии изображен на рисунке 7.
Моделирование частотных
характеристик нескорректированной системы и их анализ
На рисунке 8 представлена схема
модели разомкнутой нескорректированной системы для программы МВТУ, а на рисунке
9 - ЛАЧХ и ЛФЧХ этой системы.
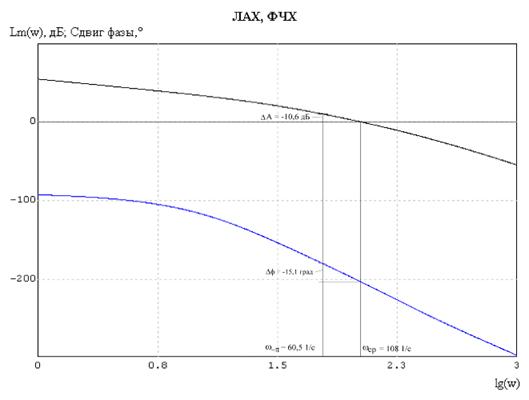
Анализируя ЛАЧХ и ЛФЧХ (рис. 9)
нескорректированной системы, приходим к выводу, что последняя неустойчива и
имеет отрицательные запасы по амплитуде и фазе (величины указаны на рис. 9).
Таким образом, система требует коррекции.
Формирование желаемой ЛАЧХ
Для построения среднечастотной
асимптоты желаемой ЛАЧХ необходимо определить частоту среза по номограммам
Солодовникова (рис. 10), имея в качестве исходных данных желаемые
перерегулирование σ
и
время регулирования tp.
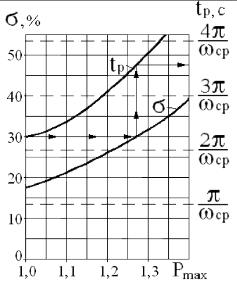
Согласно номограммам на рисунке 10
имеем:
Среднечастотная асимптота будет
проходить через точку ωср на оси
частот с наклоном
дб/дек. Частота и уровень излома
среднечастотной асимптоты в области нижних частот определяется из системы
уравнений:
решение которой дает:

Для снижения колебательных свойств
желаемой САУ примем несколько ниже расчетной:  .
.
Низкочастотный участок желаемой ЛАЧХ
наклонен на -40 дб/дек и пересекает ЛАЧХ нескорректированной системы в рабочей
точке на частоте ωср.
Уровень излома среднечастотной
асимптоты в области верхних частот принимаем равным
дБ, частота которого может быть
определена из уравнения:

Принимаем ω2 = 1/Tэ = 166,67
с-1 для упрощения синтеза корректирующего устройства.
После этой частоты наклон желаемой
ЛАЧХ станет -40 дб/дек. Еще один излом желаемой ЛАЧХ выполним на частоте ω3, которую
подберем так, чтобы желаемая ЛАЧХ совпадала с исходной: ω3 = 330 с-1, после
которой наклон ЛАЧХ станет -60 дб/дек.
Последнюю частоту сопряжения
желаемой ЛАЧХ принимаем равной ω4 = 1/Tу = 1200 1/с.
Таким образом, частоты сопряжения
желаемой ЛАЧХ будут равны:
Изображения всех ЛАЧХ представлено
на рисунках 11, а) и б).
Постоянные времени соответствующие
сопрягающим частотам на желаемой ЛАЧХ:
Передаточная функция желаемой
системы будет иметь вид:

Получение и анализ переходной
функции желаемой системы
Модельная схема замкнутой
скорректированной САУ изображена на рисунке 12. Схема предназначенная для
моделирования переходной функции системы и определения показателей качества
регулирования.
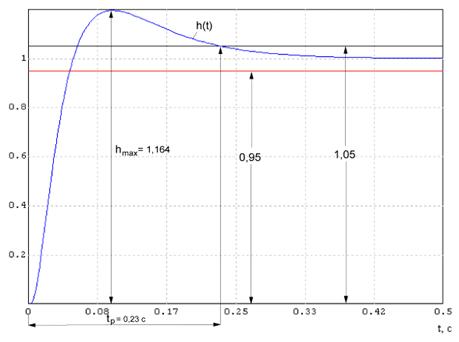
На рисунке 13 изображена переходная
функция желаемой САУ, на основании которой искомые показатели качества будут
равны:
Расчетное перерегулирование не
превышает заданное и по быстродействию система удовлетворяет заданию.
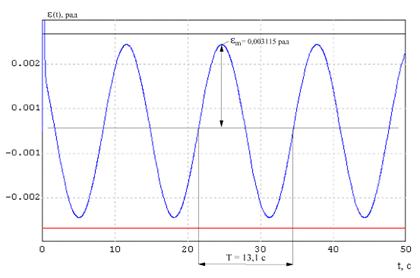
Проверка установившейся ошибки
желаемой системы
Выполним проверку точности желаемой
системы на гармоническое входное воздействие g(t) = gm sin ωрt = 2,604 sin 0,48t. Модельная
схема, предназначенная для выполнения указанной проверки, изображена на рисунке
14.
На рисунке 15 изображена
гармоническая функция ошибки регулирования в интервале 50 с. По графику функции
ошибки определяем амплитуду и период колебаний:
Моделирование логарифмических
частотных характеристик желаемой САУ
По модельной схеме (рис. 16) для
оценки запасов устойчивости желаемой системы рассчитаем ее логарифмические
частотные характеристики разомкнутого состояния (рис. 17) и годограф Найквиста
(рис. 18.)
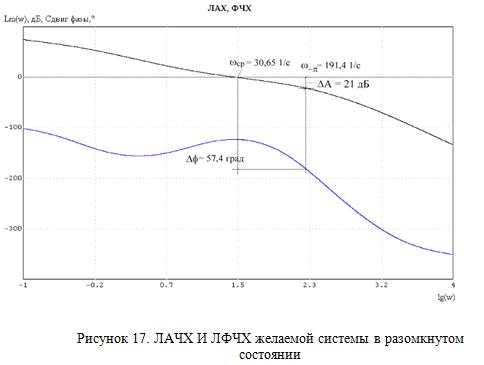
Анализ логарифмических частотных
характеристик показывает, что желаемая система обладает хорошими запасами
устойчивости по амплитуде и фазе, 21 дБ и 57,4 град. соответственно.
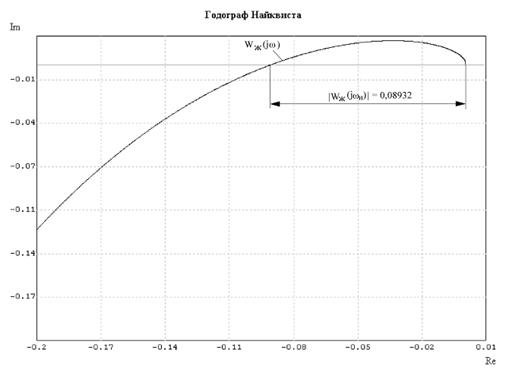
По годографу Найквиста (рис. 18)
определяем запас устойчивости по амплитуде:

Получение ЛАЧХ и передаточной
функции корректирующего устройства
Имея выражения асимптотических ЛАЧХ
нескорректированной и желаемой систем:
нетрудно получить асимптотическую
ЛАЧХ корректирующего устройства согласно выражению:
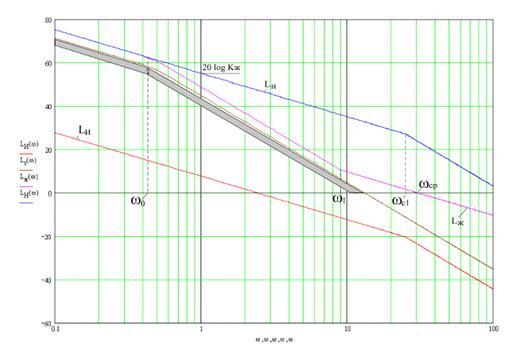
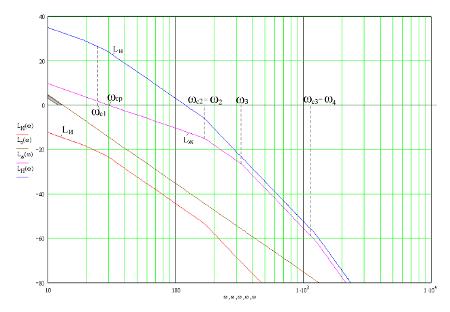
Графики нескорректированной и
желаемой ЛАЧХ, а также ЛАЧХ корректирующего устройства (КУ) изображены на
рисунке 19, а) и б).
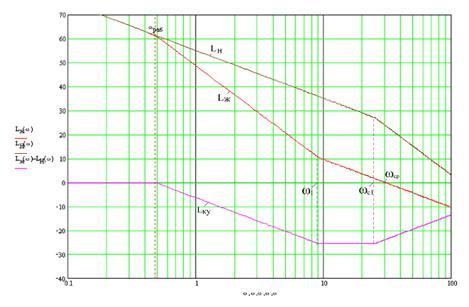
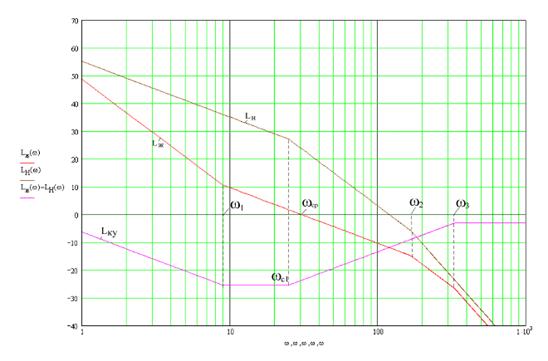
Примечание. Графики ЛАЧХ разбиты на
два участка по причине ограничений вывода точек в логарифмическом масштабе в
рисующей программе.
Передаточная функция корректирующего
устройства будет определяться выражением:
 .
.
Из справочных данных выбираем схему
реализации корректирующего устройства:

Функциональная схема
скорректированной САУ
Произведение  равно
передаточной функции желаемой системы
равно
передаточной функции желаемой системы  :
:
Таким образом, синтезированная САУ
будет удовлетворять всем заявленным требованиям по качеству и точности
регулирования, а результаты моделирования желаемой САУ остаются справедливыми и
для скорректированной системы.
Полученное КУ должно быть включено
последовательно с изменяемой частью исходной системы. К таковой относится
усилитель напряжения У1 (см. рис. 1). Поскольку сигнал напряжения Uε имеет
относительно малую амплитуду (см. рис. 15). То КУ нужно включать после У1.
Тогда функциональная схема системы примет вид, изображенный на рисунке 20.
Список использованной литературы
Макаров
И.М., Менский Б.М. Линейные автоматические системы - М.: Машиностроение, 1982.
Бесекерский
В.А., Попов Е.П. Теория систем автоматического управления. Изд. 4-е, перераб. и
доп. - СПб, Изд-во «Профессия», 2004. - 752 с. - (Серия: Специалист).
Ерофеев
А.А. Теория автоматического управления: Учебник для вузов. - 2-е изд., - СПб.:
Политехника, 2003.