Розробка електроприводу підйому мостового крану 90 т
ЗМІСТ
ВСТУП
.
ОПИС ТЕХНОЛОГІЧНОГО ПРОЦЕСУ
.1
Призначення та експлуатація мостового крана
.2
Основні режими роботи кранових механізмів
.
КОНСТРУКЦІЯ ТА ХАРАКТЕРИСТИКИ КРАНА
2.1
Механічна конструкція
.2
Пристрій і робота крана
2.3
Загальні відомості про застосуваннях різних електроприводів
.
МЕХАНІЗМ ЯК ОБ'ЄКТ РЕГУЛЮВАННЯ. ВИМОГИ ДО ПРИВОДУ
.1
Вимоги до системи електропривода і обґрунтування вибраного типу електропривода
.2
Система автоматичного управління електроприводом
.3
Технічні данні електродвигуна
3.4
Система технологічної автоматики
4.
ТЕХНІКА БЕЗПЕКИ ТА ОХОРОНА ПРАЦІ
ТЕХНІКО-ЕКОНОМІЧНЕ
ОБГРУНТУВАННЯ ПРОЕКТУ
ПЕРЕЛІК
ПОСИЛАНЬ
ВСТУП
Підйомно-транспортні машини і
механізми є основними засобами механізації та автоматизації
вантажно-розвантажувальних робіт у всіх галузях промисловості та сільського
господарства.
У зв'язку з інтенсифікацією
технологічних процесів, частка часу на підйомно-транспортні операції значно
зросла. Різке підвищення продуктивності праці, яке вкрай необхідно під час
переходу економіки на нові умови розвитку та управління, може бути досягнуто
шляхом механізації та автоматизації підйомно-транспортних і настановних
операцій, які менш автоматизовані, ніж технологічні.
Підйомно-транспортні машини (ПТМ)
вельми металлоемки, і, отже, вимагають великої кількості матеріальних і
трудових витрат, тому необхідно створити мало металлоемкие, досконалі, надійні
та раціональні конструкції. Проектуванням, підбором і установкою
підйомно-транспортних машин зайняті інженерно-технологічні працівники не тільки
у вузько спеціалізованих організаціях і підприємствах, але і в самих різних
галузях промисловості.
Підйомно-транспортне обладнання є
невід'ємною частиною практично будь-якої схеми механізації будь-якого
виробничого процесу, в кожній галузі економіки. Тому підйомно-транспортні
машини представляють винятковий методичний інтерес як об'єкт проектування при
підготовки інженерів і конструкторів-машинобудівників широкого профілю.
Кінцевою метою проектування,
розробки, впровадження та застосування підйомно-транспортних машин є ліквідація
ручних вантажно-розвантажувальних робіт і виключення важкої праці при виконанні
основних і допоміжних операцій.
.ОПИС ТЕХНОЛОГІЧНОГО ПРОЦЕСУ
1.1
Призначення та експлуатація мостового крана
Серед безлічі видів підйомно-транспортного
устаткування найбільш поширені мостові крани, які залежно від видів робіт і
умов експлуатації мають різні модифікації.
Основне призначення мостового крана-
оптимізація процесів будівництва мостів і великих будівель методом переміщення,
підйому, навантаження різних вантажів. Однак не менш важливо застосування такої
техніки на виробництві, завдяки чому при проведенні багатьох виробничих
операцій можна повністю відмовитися від ручної праці.
Експлуатація мостових кранів, по
суті - це виконання навантаження, розвантаження, монтажу важких вантажів, а
також різні операції при здійсненні виробничих технологічних процесів. Як
одно-, так і двохбалочні мостові крани відрізняються високим рівнем
продуктивності, широким діапазоном можливої вантажопідйомності і ефективним
обслуговуваних площ. Приміром, на сталеливарних заводах за допомогою мостових
кранів завантажується сировина в плавильні печі, транспортуються як кускові,
так і сипучі матеріали, розплавлений метал.
Слід звернути особливу увагу на
універсальність призначення мостових кранів: вони можуть встановлюватися як в
закритому приміщенні, так і під відкритим небом на естакадах, пристосовуватися
до роботи в умовах високого рівня запиленості, при 100% -ної вологості,
перенасиченості навколишнього середовища агресивними парами.
Експлуатація мостових кранів
передбачає наявність обов'язкових базових опцій - в даному випадку це
вантажозахватний механізм, кранова візок, що рухається по рейці, і опорна
прольотна конструкція. Якщо говорити про спосіб захоплення вантажу, то мостові
крани поділяються на спеціальні та крюкові. На спеціальному крані може бути
встановлений траверс, грейфер, електромагніт, контейнерний захоплення. Окремий
вид - мостові крани, призначені спеціально для роботи з розплавленим металом в
металургії. Вони мають механізовані захватні пристосування, що дають можливість
максимально убезпечити працю стропальників. Тому призначення мостових кранів
іноді буває дуже вузьконаправленим.
Більшість мостових кранів
складаються з уніфікованих модулів, що дозволяє збирати конфігурації залежно
від індивідуальних вимог замовників. На відміну від оригінальних конструкцій,
стандартні модулі, по-перше, значно дешевше у виготовленні і збірці, а
по-друге, значно полегшують багато процесів ремонту і технічного обслуговування.
Мостовий кран-вантажопідйомний
нескладний механізм, технічний засіб підвищеної небезпеки, що пов'язано
насамперед з переміщенням важкого вантажу на вазі, - вимагає особливої уваги в
ході роботи. Тому експлуатація мостових кранів - справа дуже відповідальна. Для
того щоб робота такої техніки була максимально ефективною, оператор і весь
обслуговуючий персонал повинні не тільки бути фахівцями високого класу, але і
скрупульозно дотримуватися всіх правил техніки безпеки. Також необхідно
враховувати, що для мостових кранів є обов'язковим періодичне планове
техобслуговування в строго певному обсязі, в ході якого виявляються і
усуваються найменші неполадки, здійснюється ремонт та заміна несправних
комплектуючих.
1.2 Основні
режими роботи кранових механізмів
мостовий кран
електродвигун технічний
Механізми крана працюють (включені)
не весь час робочого циклу крана. Механізм підйому вантажу працює тільки під
час опускання порожньої підвіски крюка і підйому її з вантажем, а механізми
пересування крана і вантажного візка працюють тільки під час виконання
відповідних рухів. Під час виконання інших технологічних операцій: стропування
вантажу, установки його на опору і расстроповкі механізми крана не працюють, т.
Е. Час роботи механізмів крана - менше часу його циклу і в роботі механізмів є
перерви (паузи). Необхідність підготовки кранівника до виконання наступної
технологічної операції збільшує час цих перерв.
Іншими словами, кожен цикл роботи
крана характеризується чергуванням періодів роботи механізмів і технологічних
пауз, а сам вантажопідйомний кран працює в повтор- но-короткочасному режимі, т.
Е. Його механізми працюють періодично (повторно) малі проміжки часу
(короткочасно). Крім того, кожен процес роботи механізму крана складається з
періоду пуску (розгін поступально рухомих мас вантажу і обертових деталей
механізму), періоду усталеного руху вантажу і деталей з постійною швидкістю і
періоду гальмування (уповільнення зазначених мас вантажу і обертових деталей).
Очевидно, що на відміну від періоду усталеного руху механізму періоди пуску і
гальмування складають період несталого руху. Швидкості робочого руху змінюються
від нуля до заданого значення і навпаки. Крім того, в період гальмування
механізму його привід вимкнений (механізм працює завдяки дії сил інерції), що
ще більше збільшує час перерви в його роботі.
Правила по кранах на підставі даних
коефіцієнтів встановлювали наступні режими роботи вантажопідіймальних кранів і
їх механізмів: з ручним приводом і з машинним - легкий Л, середній С, важкий Т
і вельми важкий Вт Дана класифікація досить умовна і не дозволяє врахувати
реальні умови роботи крана (механізму); отримати фактичні дані для проектування
і розрахунку крана; забезпечити необхідний рівень надійності, довговічності та
безпеки; здійснювати уніфікацію деталей і складальних одиниць і т. д. Тому в
даний час зазначену класифікацію режимів роботи застосовують для розрахунків і
вибору кранового електроустаткування.
У 1980 р затверджено новий
Міжнародний стандарт ІSO (Міжнародна організація по стандартизації) 4301 -1980
на класифікацію вантажопідіймальних кранів і їх механізмів, у розробці якого
брали участь фахівці з нашої країни. З урахуванням основних положень стандарту
розроблені і діють з 1 січня 1985 ГОСТ 25546-82, що встановлює режими роботи
кранів, і ГОСТ 25325-83 - режими роботи кранових механізмів. Необхідно
відзначити, що нові ГОСТи по-різному класифікують режими роботи
вантажопідіймальних кранів і їх механізмів. В основу класифікації покладені
класи використання та навантаження, різні комбінації (поєднання) яких
відповідають певній групі режиму роботи ГРР.
Класи використання механізмів
характеризують інтенсивність їхньої роботи в годинах, т. Е. Сумарне фактичний
час розгону, усталеного руху і гальмування за період заданого терміну служби.
Встановлено сім класів використання А0 ... А6 (від 800 до 50 000 год).
Класи використання кранів
характеризують загальне число циклів роботи крана за термін його служби. Термін
служби встановлюють по ГОСТу або ТУ на конкретний кран. Встановлено десять
класів використання С0 ... С9 (від 1,6-104 до 4-10® циклів).
Класи навантаження механізмів
характеризують спектр діючих на механізм навантажень, а кранів - спектр
переміщуваних вантажів. В обох випадках класи оцінюють коефіцієнтом
навантаження. Для механізмів прийнято чотири класи навантаження В1 ... В4,
оцінювані коефіцієнтом навантаження (від 0,125 до 1), а для кранів-п'ять класів
Q0 ... Q4, відповідних коефіцієнтах навантаження (від 0,063 до 1). Залежно від
комбінації класів використання та навантаження встановлено шість груп режиму
роботи механізмів кранів 1М ... 6М і вісім груп режиму роботи кранів 1К ... 8К.
Залежно від конструкції, типу
приводу, технологічного призначення і умов експлуатації вантажопідіймальні
крани відносять до різних груп режиму роботи.
До груп режиму роботи 7К та 8К
віднесені спеціальні вантажопідйомні крани металургійних виробництв. Група
режиму роботи вантажопідіймальних кранів, які переміщують нагріті понад + 300 °
С вантажі, розплавлений метал і шлак, отруйні та вибухонебезпечні речовини та
інші небезпечні вантажі, повинна бути не менше 6К. Слід пам'ятати, що з
урахуванням групи режиму роботи механізму (крана) не тільки розраховують діючі
навантаження, двигуни, гальма, терміни служби деталей і складальних одиниць, а
й приймають нормативні значення коефіцієнтів запасу міцності сталевих канатів
(ланцюгів) і запасу гальмування механізму підйому вантажу, визначають діаметри
блоків і барабанів залежно від діаметра застосовуваних канатів, величини
міжремонтних циклів і пов'язану з ними періодичність виконання ТО кранів.
Останні мають велике значення для правильної експлуатації вантажопідіймальних
кранів. Тому з урахуванням характеру додатки зовнішнього навантаження до
механізму крана розрізняють два режими його роботи: руховий і гальмівної. При
руховому режимі роботи механізму двигун долає момент сил опору Мс і крутний
момент на валу ротора двигуна МЛВ спрямований у бік його обертання п, наприклад
при підйомі вантажу і пересуванні крана (вантажного візка). У цьому випадку
вважають крутний момент двигуна позитивним, а момент сил опору - негативним
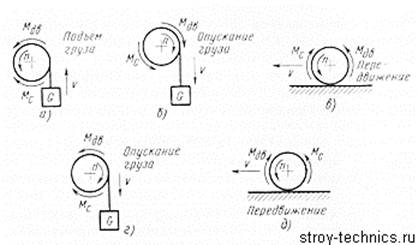
Рис. 1. Режими роботи механізмів
крана: а, б, в - руховий, г, д - гальмівний
При опусканні невеликого за масою
вантажу, сила тяжіння якого не може подолати навіть момент внутрішніх сил опору
в механізмі Мс, двигун розвиває позитивний момент МЛВ, спрямований у бік руху
вантажу (рис. 35,6). Таке опускання вантажу називають силовим. У випадках
обмеження швидкості опускання важкого вантажу (рис. 35, г) або пересування
крана (візка) за наявності попутного вітру або ухилу в бік руху (рис. 35, д)
двигун протидіє руху і крутний момент на валу ротора МЛВ протилежний напрямку
його обертання п, т. е. стає негативним, а Л1с, навпаки, позитивним. Такий
режим роботи механізму називають гальмівним (електричне гальмування). Очевидно,
що кранове електрообладнання теж працює в повторно-короткочасному режимі. Число
включень і відносна їх тривалість істотним чином визначають надійність і
довговічність його роботи. На працездатність електродвигунів кранових
механізмів, крім того, впливають змінні величини навантажень і режими їх
роботи. За характером навантаження електродвигунів розрізняють дві групи
кранових механізмів: підйому вантажу, роботу якого характеризує відносно
невеликий час розгону (1 ... 2 с) при відповідності номінальної зовнішнього
навантаження і крутного моменту на валу двигуна; пересування крана (вантажного
візка), роботу якого відрізняють високі значення інерційних навантажень і
досить великий час розгону (8 ... 10 с) при великих значеннях пускових моментів
на валу електродвигуна і струму в його ланцюга. Кранове електрообладнання
розраховують і вибирають з урахуванням режимів роботи, встановлених Правилами
по кранах.
Допустимі зовнішні навантаження на
електродвигун залежать від температури його нагрівання, а отже, від режиму
роботи.
Розрізняють три основних номінальних
режиму роботи кранових електродвигунів: - тривалий, при якому двигун працює
протягом тривалого часу без виключення і його температура при постійній
зовнішньої навантаженні, що відповідає номінальній потужності, не перевищує
допустимої температури ізоляції обмоток; - Короткочасний з тривалістю роботи
двигуна при постійній зовнішньої навантаженні протягом 10, 30, 60 і 90 хв з
наступною перервою в роботі до повного охолодження; - Повторно-короткочасний
(аналогічно режиму роботи кранових механізмів), що представляє собою
повторювані цикли роботи двигуна при тривалості циклу до 10 хв. Цикл
складається з двох етапів: включення двигуна - робота; вимикання - пауза.
Режим роботи електродвигуна
характеризує величина ПВ, яка для механізмів кранів групи режиму роботи 1М ...
ЗМ дорівнює 15%, 4М - 25% і 5М -40%, а також число включень двигуна на годину
(середнє за зміну), відповідно рівне 60, 120 і 240.
. КОНСТРУКЦІЯ ТА ХАРАКТЕРИСТИКИ КРАНА
.1
Механічна конструкція
Конструкція крана (Рисунок 1)
складається з моста по рейках якого переміщається вантажний візок 2. Управлення
краном виконується з кабіни кранівника 3, розташованої під робочою площадкою
моста. Для обслуговування живлять кранових тролів і струмоприймачів передбачена
кабіна для обслуговування тролеї 4. Електрообладнання 5, розташоване на мосту,
візки і в кабіні кранівника, призначене для керування механізмами крана.
Токоподвод до вантажного візка здійснюється гнучким кабелем 6, підвішеним до
кареток, переміщається по монорельсу.
Міст крана складається з двох
півмилі, вага кожного з яких рівномірно, передається на чотири ходових колеса.
Напівмости шарнірно з'єднані між собою перехідними балками. Привід пересування
моста - роздільні. Міст обладнаний перехідними площадками, сходами, буферами
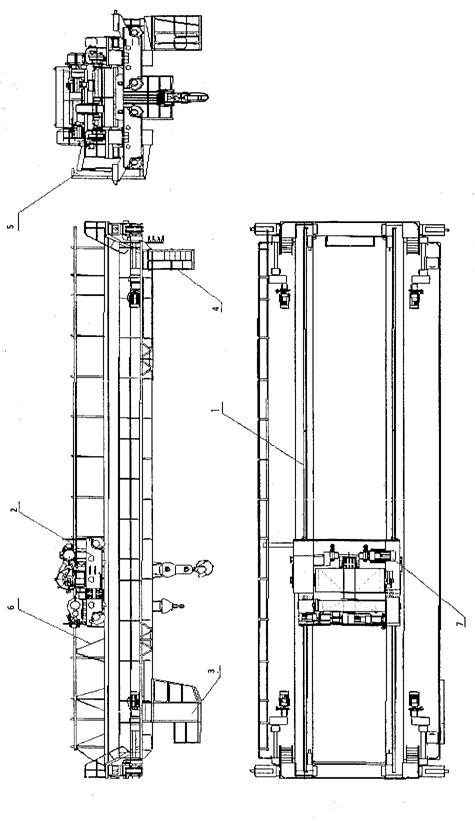
- міст, 2 - вантажний візок, 3 -
кабіна кранівника, 4 - кабіна для обслуговування тролів, 5 - токоподвод до
вантажного візка; 6 - електрообладнання крана, 7 Електродвигун, PN = 75кВт
Рисунок 2. Загальний вигляд крана
2.2
Пристрій і робота крана
Електропривод більшості
вантажопідйомних машин характеризується повторно - короткочасному режимом
роботи при великій частоті включення, широкому діапазоні регулювання швидкості
і постійно виникаючих значних перевантаженнях при розгоні і гальмуванні
механізмів. Особливі умови використання електроприводу у вантажопідйомних
машинах стали основою для створення спеціальних серій електричних двигунів і
апаратів кранового виконання.
В даний час кранове
електрообладнання має у своєму складі серії кранових електродвигунів змінного і
постійного струму, серії силових і магнітних контролерів, командоконтролерів,
кнопкових постів, кінцевих вимикачів, гальмових електромагнітів і електрогідравлічних
штовхачів, пускотормозних резисторів і ряд інших апаратів, комплектуючих різні
кранові електроприводи.
Міст крана складається з двох
прогонових балок коробчатого перетину, кожна з яких спирається на дві кінцеві
балки коробчатого перетину, шарнірно з'єднаних між собою сполучної балкою, що
утворюють жорстку раму.
На кінцевих балках моста крана
закріплені вісім дворебордними ходових коліс, з яких чотири - приводні.
Для виходу на майданчик моста з
кабіни передбачений люк.
На прогонових балках за допомогою
притискних планок закріплюються подтележечние рейки.
Майданчики прогонових балок
обладнані перилами і призначені для безпечного і зручного обслуговування
кабельного токоподвода вантажного візка, а також електрообладнання та
механізмів, розташованих поза кабіною і візки.
Для обслуговування головних тролеї
біля торця моста підвішена кабіна.
Кінцеві балки моста при монтажі
крана обладнуються перилами, а майданчики поручнями і огорожами. Перехід між
майданчиками прогонових балок, здійснюється за кінцевим балкам з використанням
сходів.
Обмеження переміщення візка крана
здійснюється буферними пристроями, розташованими на прогонових балках моста, а
крана - буферами, закріпленими на кінцевих балках.
Скребки, встановлені перед колесами
моста запобігають можливість потрапляння під колеса сторонніх предметів.
Механізм пересування крана з
приводними колесами виконаний з чотирма роздільними приводами, що складаються з
електродвигуна, гальма, швидкохідного валу з шарнірами муфт, редуктора,
тихохідного валу з шарнірами муфт, сполученого з валом приводного колеса.
Загальний вигляд крана показаний на рис.1.1.
Вантажний візок складається (рис.
1.2.) з: рами, двох механізмів підйому з вантажними підвісками, механізму
пересування візка. На одному крані вантажний візок з електромагнітом на
допоміжному підйомі, обладнується і кабельним барабаном.
Рисунок. 3. Вантажний візок.
-рама; 2- механізм головного
підйому; 3- механізм допоміжного підйому, 4-механізм пересування візка; 5-кабельний
барабан.
Рама візка зварна, балочной
конструкції, роз'ємна для забезпечення можливості її транспортування
залізничним транспортом. З'єднання частин рами виконано за допомогою накладок і
чистих болтів без застосування зварювання. Рама встановлена на чотири ходових
колеса, два з яких приводні. Ходові колеса кріпляться до рами за допомогою
кутових букс.
Вантажний візок пересувається по
рейках уздовж пролітних балок моста.
Механізм головного підйому
складається з електродвигуна, двох шарнірів муфт з проміжним валом, двох
редукторів з зубчастої муфтою між ними, двох колодкових гальм, барабана,
поліспаста, підвіски вантажопідйомністю 90т.
Поліспаст механізму головного
підйому - п'ятикратний здвоєний.
Барабани механізму підйомів
отримують обертання через зубчасту маточину з редуктора. Опорами барабанів з
одного боку є підшипники у вихідному зубчастому валі редуктора, а з іншого боку
підшипники в опорі барабана.
Барабан механізму головного підйому
складається з зварної обичайки, на поверхні якої нарізані гвинтові канавки, що
забезпечують напрям і одношарові навивки вантажного каната. За допомогою
шпильок з пружинними шайбами і гайками, на поверхні барабана накладками,
закріплюються кінці каната. Задня опора барабана складається з корпусу, який
може повертатися щодо шарніра і другим кінцем спирається на ваговимірювальних
осередок SІWAREX R серії RN, яка є одним з елементів обмежувача
вантажопідйомності. Обертання на вилку кінцевого вимикача передається з вала
маточини через стакан, закріпленого до валу болтами і сухар.
Механізм допоміжного підйому
складається з електродвигуна, валу з зубчастими муфтами, редуктора, колодкового
гальма, барабана, здвоєного поліспаста, підвіски вантажопідйомністю 20 т.
Поліспаст механізму допоміжного
підйому - дворазовий здвоєний.
Барабан допоміжного механізму
підйому складається з обичайки, на поверхні якого нарізані гвинтові канавки, що
забезпечують напрям і одношарові навивки вантажного каната. На поверхні
барабана накладками закріплюються кінці каната. Задня опора барабана складається
з корпусу, який може повертатися щодо шарніра і другим кінцем спирається на
ваговимірювальних осередок SІWAREX R серії RN, яка є одним з елементів
обмежувача вантажопідйомності. Обертання на вилку кінцевого вимикача
передається з вала маточини через стакан, закріпленого до валу болтами і сухар.
Візок спирається на чотири
дворебордними колеса, два з яких приводні.
Механізм пересування візка
складається з електродвигуна, колодкового гальма, швидкохідного валу з
зубчастими муфтами, вертикального редуктора, двох проміжних валів із зубчастими
муфтами (шарнірами муфт) і двох приводних коліс. Приводні колеса візка
складаються з колеса, насадженого на вал із застосуванням шпонок. Вал колеса
обертається на підшипниках кочення, встановлених в кутових буксах.
Кабіна управління закритого типу
засклена, має тепло і шумоізоляцію, оснащена кондиціонером, електрообігрівачем
і пультом управління.
Пульт управління призначений для
управління всіма механізмами крана. Пульт управління поворотний обладнаний
кріслом кранівника, що має регулювання положення по висоті й уздовж поздовжньої
осі кабіни.
У конструкції крана передбачені:
вільний доступ для обслуговування
механізмів та електрообладнання;
безпеку обслуговування, ремонту,
монтажу механізмів і їх складальних одиниць;
місця для стропування складальних
одиниць крана при монтажі та ремонті;
система сходів і майданчиків,
необхідних для технічного обслуговування і ремонту механізмів та
електрообладнання.
У крановому електроприводі почали
досить широко застосовувати різні системи тиристорного регулювання та
дистанційного управління по радіоканалу або одному дроту.
Номінальна вантажопідйомність - маса
номінального вантажу на гаку або захопно пристрої, що піднімається
вантажопідйомної машиною.
Швидкість підйому гака вибирають
залежно від вимог технологічного процесу, в якому бере участь дана
вантажопідйомна машина, характеру роботи, типу машини і її продуктивності.
Режим роботи вантажопідіймальних
машин циклічний. Цикл складається з переміщення вантажу по заданій траєкторії і
повернення у вихідне положення для нового циклу.
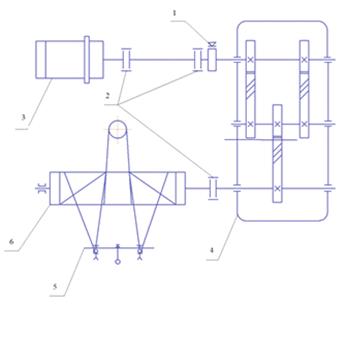
Рисунок 4.Кінематична схема.
-гальма, 2-муфта, 3-двигуе головного
підйому, 4-редуктор, 5-полиспаст, 6-барабан.
2.3
Загальні відомості про застосуваннях різних електроприводів
У цехах металургійних підприємств
знаходять застосування кранові електродвигуни трифазного змінного струму
(асинхронні) і постійного струму (послідовного або паралельного збудження).
Вони працюють, як правило, в повторно-короткочасному режимі при широкому
регулюванні частоти обертання, причому робота їх супроводжується значними
перевантаженнями, частими пусками, реверсами, торможениями. Крім того,
електродвигуни кранових механізмів працюють в умовах підвищеної трясіння і
вібрацій. У ряді металургійних цехів вони, крім усього цього, піддаються впливу
високої температури (до 60-70 ° С), пари і газів.
У зв'язку з цим за своїми
техніко-економічними показниками та характеристиками кранові електродвигуни
відрізняються від двигунів загальнопромислового виконання.
Основні особливості кранових
двигунів:
• виконання, зазвичай, закрите;
• ізоляційні матеріали мають клас
нагрівостійкості F і Н;
• момент інерції ротора по
можливості мінімальний, а номінальна частота обертання відносно невелика - для
зменшення втрат енергії в перехідних процесах;
• магнітний потік відносно великий -
для забезпечення великої перевантажувальної здатності по моменту;
• значення короткочасної
перевантаження по моменту для кранових електродвигунів постійного струму в
годинному режимі становить 2,15 -5,0, а для двигунів змінного струму - 2,3 -
3,5;
• відношення максимально допустимої
робочої частоти обертання до номінальної становить для постійного струму 3,5 -
4,9, для електродвигунів змінного струму 2,5;
• для кранових електродвигунів
змінного струму за номінальний режим прийнятий режим з ПВ = 40%, а для
електродвигунів постійного струму поряд з цим режимом - режим 60 хвилин
(часовий). Найбільш широко для приводу кранових механізмів застосовуються
трифазні асинхронні електродвигуни з фазним ротором, що забезпечують
регулювання швидкості і плавний пуск при відносно великому значенні
навантаження на валу. Ці електродвигуни встановлюють на кранових механізмах при
середньому, важкому і дуже важкому режимах роботи. Вони допускають регулювання
пускового моменту в заданих межах і регулювання швидкості в діапазоні (1: 3) -
(1: 4).
• Асинхронні електродвигуни з
короткозамкненим ротором застосовуються рідше (для приводу механізмів
пересування маловідповідальних тихохідних кранів) через кілька підвищеного пускового
моменту і значних пускових струмів, хоча маса їх приблизно на 8% менше, ніж у
асинхронних двигунів з фазним ротором, а вартість в 1 , 3 рази менше, ніж у цих
двигунів при однаковій потужності. Асинхронні електродвигуни з короткозамкненим
ротором іноді застосовують при режимах Л і С (для механізмів підйому).
Застосування їх на механізмах кранів, що працюють у більш важких режимах,
обмежено малої допустимої частотою включення і складністю схем регулювання
швидкості.
• Перевагами асинхронних електродвигунів
в порівнянні з електродвигунами постійного струму є їх відносно менша вартість,
простота обслуговування і ремонту. Маса кранового асинхронного електродвигуна з
зовнішньої самовентиляцією в 2,2 - 3 рази менше маси кранового електродвигуна
постійного струму при однакових номінальних моментах, а маса міді відповідно
приблизно в 5 разів менше. Якщо експлуатаційні витрати прийняти за одиницю для
асинхронних електродвигунів з короткозамкненим ротором, то для електродвигунів
з фазним ротором ці витрати складуть 5 одиниць, а для електродвигунів
постійного струму 10 одиниць. Тому в кранових електроприводах найбільш широке
застосування отримали асинхронні електродвигуни (близько 90% від загального
числа електродвигунів).
Електродвигуни постійного струму
доцільно застосовувати в тих випадках, коли потрібно широке і плавне
регулювання швидкості, для приводів з великим числом включень в годину, при
необхідності регулювання швидкості вгору від номінальної, для роботи в системі
Г-Д.
Останнім часом досягнення у створенні
щодо малогабаритних і економічних силових напівпровідникових перетворювачів ще
більш розширили область застосування електродвигунів змінного струму.
Напівпровідникові перетворювачі на повністю керованих силових ключах, а саме:
ІGCT- тиристорах і силових ІGBT-транзисторах дають можливість застосовувати
асинхронні двигуни з короткозамкненим роторам в крановому господарстві
повсюдно.
. МЕХАНІЗМ ЯК ОБ'ЄКТ РЕГУЛЮВАННЯ.
ВИМОГИ ДО ПРИВОДУ
3.1 Вимоги
до системи елктропривода і обгрунтування вибранного типу електропривода
Для вибору системи електроприводу
необхідно чітко уявляти собі технологічні вимоги до приводу того механізму, для
якого він вибирається.
Для якісного виконання підйому,
спуску і переміщення вантажів електропривод кранових механізмів повинен
відповідати таким основним вимогам:
Регулювання кутової швидкості
двигуна в порівняно широких межах у зв'язку з тим, що важкі вантажі доцільно
переміщати з меншою швидкістю, а порожній гак або ненавантажену візок - з
більшою швидкістю для збільшення продуктивності крана.
Знижені швидкості необхідні також
для здійснення точної зупинки вантажів, що транспортуються з метою обмеження
ударів при їх посадці і полегшують роботу оператора. Забезпечення необхідної
жорсткості механічних характеристик приводу, особливо регулювальних, з тим щоб
низькі швидкості майже не залежали від вантажу.
Обмеження прискорень до допустимих
меж при мінімальній тривалості перехідних процесів. Перша умова пов'язана з
ослабленням ударів в механічних передачах при виборі зазору, із запобіганням
пробуксовки ходових коліс візків і мостів, зі зменшенням розгойдування
підвішеного на канатах вантажу при інтенсивному розгоні і різкому гальмуванні
механізмів пересування; друга умова необхідно для забезпечення високої
продуктивності крана.
Реверсування електроприводу та
забезпечення його роботи, як в руховому режимі, так і в гальмівному режимі.
• Вимоги, що пред'являються
до електроприводу головного підйому
• • Двигун повинен бути
захищений від перевантаження і коротких замикань в силовий ланцюга і ланцюга
керування. При припиненні живлення приводного двигуна повинна автоматично
відключиться ланцюг управління, а після відновлення повинен бути виключений
самозапуск;
• • Привід головного підйому
повинен бути забезпечений нормально -Замкнута контактом, а при включенні
двигуна гальмо має автоматично відкриватися. Замикання струмопровідних частин
електричного пристрою приводу гальма на корпус не повинно викликати мимовільне
вмикання цього приводу. У електродвигуна змінного струму при живленні від керованого
перетворювача, зняття механічного гальма відбувається за величини струму
двигуна, який забезпечує необхідний момент для утримання кабіни;
• • Привід повинен бути
реверсивним;
• Клас ізоляційних матеріалів
вибраного типу приводу повинен бути F або Н;
• Робота приводу в
повторно-короткочасному режимі з ПВ = 40%;
• Прискорення підйому гака з
вантажем не повинна перевищувати= 0,3 м / с 2;
• Швидкість підйому не повинна
перевищувати Vmax = 1,4 м / с;
Діапазон регулювання приводу підйому
D (4: 1)
Режимів роботи двигуна крана.
Електродвигуни, встановлені на
кранах, працюють у важких умовах, часто в приміщеннях з підвищеною температурою
або з великим вмістом в них парів і газів, а також на відкритому повітрі.
Мостові крани мають повторно-короткочасний режим роботи, з частими пусками і
гальмуваннями.
Повторно - короткочасний режим - це
режим роботи двигуна, при якому робочі періоди tраб чергуються з періодами
відключення t0.
Повторно - короткочасний режим
роботи характеризується відносною тривалістю включення (ПВ).
Номінальне значення відносної
тривалості включення - 15, 25, 40, 60%.
Розглянемо режими роботи двигунів,
які представлені на малюнку 5.
Двигуни механізмів моста і візка при
роботі з вантажем і без вантажу працюють у нормальному режимі двигуна.
При підйомі вантажу або порожнього
гака двигун підйомного механізму працює в руховому режимі, а при опусканні
вантажу можливі два випадки:
Якщо момент вантажу Мгр більше
моменту двигуна Мдв, то вантаж буде опускатися під дією власної ваги з
урахуванням моменту тертя Мтр і електродвигун повинен бути включений на підйом,
щоб пригальмовувати вантаж, тобто в цьому випадку момент двигуна дорівнює
Мдв = Мгр - Мтр
Такий режим називається гальмівним
спуском.
дв = Мтр - Мгр
Такий режим називається силових
спуском. При опусканні порожнього гака також можливі два випадки, тобто спуск
може бути і гальмівним, і силовим.
3.2 Система
автоматичного управління электроприводом
Побудова системи автоматичного
управління з орієнтацією поля ротора в системі координат з керованим ковзанням
Існує два принципи побудови системи
автоматичного регулювання асинхронного двигуна з векторним керуванням:
• Принцип орієнтації поля в системі
координат з керованою швидкістю обертання. Тут ориентирующим елементом є
регулятор моменту, тоді обертове магнітне поле утворюється шляхом фіксації
вектора потокозчеплення ротора в системі координат і наданням цій системі
необхідної швидкості обертання. Регулятор моменту будується у вигляді зверненої
моделі ланки електромагнітного моменту.
• Принцип орієнтації системи
координат по полю. У цьому варіанті ориентирующим є сам об'єкт регулювання, і
при цьому з асинхронного двигуна отримують інформацію про стан вектора
потокозчеплення взаємоіндукції і потім отримують вектор потокозчеплення ротора.
Необхідність в датчиках потокосцепления в пазу асинхронного двигуна є істотним
недоліком даного варіанта.
Функціональна схема системи
управління реалізує принцип управління приведена на рис.4
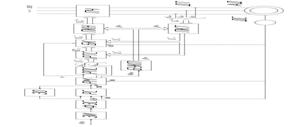
Рис.6 Функциональная схема САУ с
ориентацией поля в системе с управляемым скольжением
Опис схеми:
Силова частина:
ПЧ - перетворювач частоти;
АД - асинхронний двигун;
Інформаційна частина:
ДТ - датчик фазних струмів;
ДС - датчик швидкості (реально не
існує);
БК - блок компенсації внутрішніх
перехресних зв'язків об'єкта;
ПКН - перетворювач координат напруги
(здійснює пряме перетворення за допомогою матриці As; при моделюванні
перетворення координат не використовується);
ПКТ - перетворювач координат струму
(здійснює зворотне перетворення за допомогою матриці As-1; при моделюванні
перетворення координат не використовується);
БУКП - блок управління координатними
перетворювачами;
Регулююча частина:- регулятор
швидкості;
ЗО-ланка обмеження;
РМ - регулятор моменту;
РТС - регулятор струмів статора;
РП - регулятор потокозчеплення;
ЗІ - задатчик інтенсивності;
Характеристика системи регулювання:
. Схема має замкнуту систему
регулювання проекцій струмів статора - замкнута з регулюванням по відхиленню
(регулювання ведеться в системі координат зорієнтованої за вектором
потокозчеплення ротора, тобто регулює постійні сигнали);
. Система регулювання модуля вектора
потокозчеплення ротора з регулятором потокосцепления - разомкнутая система
регулювання.
. Система регулювання
електромагнітного моменту з регулятором моменту - разомкнутая з регулюванням по
обуренню (кутова швидкість обертання ротора);
. Система регулювання швидкості -
замкнута з регулюванням по відхиленню (в реальній системі швидкість двигуна
обчислюється на підставі моделі двигуна);
Синтез регуляторів
Система регулювання будується на
принципах підлеглого регулювання, в основу яких закладені наступні основні
положення:
• Об'єкт регулювання представляється
у вигляді послідовно з'єднаних ланок.
• Розбиття об'єкта на ланки
виробляється з такого розрахунку, щоб на виході кожної ланки була фізична
величина, яка представляє інтерес з точки зору регулювання і контролю.
• На виході регулюючої частини
встановлюється фільтр з передавальної функцією:

де Тμ - некомпенсированная
постійна часу.
Для кожної регульованої
координати будується замкнута система регулювання з індивідуальним регулятором,
на який покладено дві основні функції: компенсувати ланка об'єкта регулювання
потрапив у контур і забезпечення астатизма контуру (як мінімум першого порядку)
по керуючому впливу. Система при цьому налаштовується на модульний оптимум.
Фізичним змістом налаштування на модульний оптимум є те, що в смузі пропускання
кожного контуру коефіцієнт посилення дорівнює 1 і тому нехтуємо зміною сигналу
при проходженні через систему. При налаштуванні на модульний оптимум
використовується інтегральний критерій якості минимизирующий помилку і її
похідну.
3.3
Технічні вимоги до крана представлені в таблиці 1
Исходные данные
|
Найменування
|
Позначення
|
Величина
|
|
Маса вантажу, т
|
GH
|
90
|
|
Масса крюка, т
|
GN
|
3,03
|
|
Сумарний момент інерції
механізму, кг м2
|
Jm
|
2,3
|
|
Передавальне відношення
редуктора
|
і
|
125,00
|
|
Сумарний ККД механізму
|
η
|
0,90
|
|
Швидкість підйому задана, м /
с
|
V
|
0,1
|
|
Прискорення м / с2
|
a
|
0,04
|
|
Діаметр барабана, м
|
Dб
|
|
поліспастніть
|
Кратність
|
m
|
5,000
|
|
кількість гілок
|
|
2
|
|
Номінальна швидкість двигуна
задана, об / хв
|
nз
|
1000
|
|
кількість двигунів
|
y
|
1
|
|
Висота підйому, м
|
h
|
28,00
|
|
Діапазон регулювання
швидкості
|
|
1:4
|
|
Час технологічної паузи, сек
|
tП
|
423
|
|
Прискорення вільного падіння,
м / с2
|
g
|
9,81
|
Попередній вибір потужності
електродвигуна
Приведений до валу двигуна статичний
момент при підйомі вантажу, МС.

Момент статичний підйому з
урахуванням запасу 15%

Розрахункова потужність
електродвигуна

За попередніми розрахунками час
циклу Tц перевищує 10 хвилин, отже, необхідно вибрати електродвигун,
призначений для роботи в режимі S1.
Вибираємо асинхронний електродвигун
з кз ротором K21F315S6
Таблица 2
Параметри електродвигуна К21F315S6
|
Найменування
|
Позначення
|
Величина
|
|
Потужність номінальна, кВт
|
Рн
|
75,000
|
|
Швидкість оберт. номін., об /
хв
|
n
|
983,000
|
|
Момент інерції ротора, кг * м
|
Jд
|
2,630
|
|
Струм номінальний А
|
Ін
|
133,000
|
|
ККД,%
|
η
|
0,925
|
|
Cos φ
|
cos φ
|
0,860
|
|
Момент номінальний, Н * м
|
МN
|
731,000
|
|
Момент максимальний, Н * м
|
Ммакс
|
1340,000
|
|
Момент критичний, Н * м
|
Мк
|
1754,000
|
|
Параметри схеми заміщення:
|
|
Індуктивне опору. гл. магн.
ланцюги, в.о.
|
xm
|
3,500
|
|
Активне опору. статорной
ланцюга, в.о.
|
r1’
|
|
Індук. сопр. расc, статорной
ланцюга, в.о.
|
x1’
|
0,110
|
|
Активне опору. роторної
ланцюга, в.о.
|
r2'
|
0,019
|
|
Індук. сопр. расc, роторною
ланцюга, в.о.
|
x2'
|
0,120
|
|
режим роботи
|
S1
|
|
охолодження
|
примусова вентиляція
|
На механізмах крана передбачається
застосування асинхронних електродвигунів з короткозамкненим ротором фірми VEM
motors (Німеччина), що допускають роботу в системах регульованого
електроприводу змінного струму в широкому діапазоні зміни швидкості обертання.
Характерними особливостями двигунів цього типу є:
• жорсткі механічні характеристики
двигунів;
• обмотки статора двигуна
виконуються з дроти з ізоляцією класу нагрівостійкості «F» (робоча температура
до 155 ° С);
• кліматичне виконання всіх
електродвигунів У1 по ГОСТ 15150-69, ступінь захисту ІP54 по ГОСТ 17494-87,
група умов експлуатації по стійкості до механічних зовнішніх чинників МЗ (на
вантажопідіймальних кранах) по ГОСТ 17516.1-90; ротора електродвигунів
піддаються статичної та динамічної балансуванню ; електродвигуни виконуються з
незалежною вентиляцією; двигуни виготовляються з вбудованими датчиками
температури і Термовимикач, що забезпечують включення вентилятора незалежного
обдування при температурі обмотки 70 ° С; на двигуни можуть бути встановлені
цифрові датчики швидкості (енкодери) і реле максимальної швидкості; двигуни
механізмів переміщення забезпечені вбудованими дисковими електромагнітними гальмами.
3.4 СИСТЕМА ТЕХНОЛОГІЧНОІ АВТОМАТИКИ
Опис контролера SІMATІC S7-300
• Модульний програмований контролер
для вирішення завдань автоматизації різного рівня складності.
• Широкий спектр модулів для
максимальної адаптації до вирішення будь-якої задачі.
• Можливість використання
розподілених структур вводу-виводу і просте включення в різні типи промислових
мереж.
• Зручна для обслуговування
конструкція і робота з природним охолодженням.
• Вільне нарощування можливостей при
модернізації системи.
• Висока потужність, завдяки великій
кількості вбудованих функцій.ІMATІC S7-300C
• Випробувана технологія S7-300.
• Наявність вбудованих входів і
виходів, можливість використання в якості готової системи автоматизації.
• Підтримка функцій швидкісного
рахунки, ПІД-регулювання та позиціонування на рівні операційної системи
центрального процесора.
• Розширення модулями S7-300.
SІMATІC S7-300F
• Програмований контролер для
побудови розподілених систем автоматики безпеки.
• CPU 315F-2DP / CPU 317F-2DP з
вбудованими функціями автоматики безпеки і інтерфейсом PROFІBUS DP, що
підтримує профіль PROFІsafe.
• Системи розподіленого вводу-виводу
на основі станцій ЕТ 200М з F-модулями і станцій ЕТ 200S PROFІsafe.
• Забезпечення рівнів безпеки SІL
... SІL2 по ІEC / EN 61508, а також категорій 1 ... 4 по EN 954-1.
• Програмований контролер для
експлуатації у важких промислових умовах.
• Перевірена технологія S7-300.
• Зручна установка, програмування,
обслуговування та експлуатація.
• Ідеальне виріб для
автомобілебудування, хімічної промисловості, установок для захисту
навколишнього природного середовища, різних виробництв, харчової промисловості
і т.д.
• Замінює дорогі системи
спеціального призначення.
• Допускає тимчасове обмерзання
друкованих плат. Модифікації контролерівІMATІC S7-300 відповідають вимогам
національних і міжнародних стандартів і норм, включаючи:
• DІN
• Сертифікат UL
• Сертифікат CSA
• FM, клас 1, групи А, В, С і D
(температурна група Т4, до 135 ° С)
• Сертифікат відповідності
Держстандарту Росії №РОССТ) Е.АЯ46.В61141 від 14.03.2003г. підтверджує
відповідність програмованих контролерів SІMATІC та їх компонентів вимогам
стандартів ГОСТ Р 50377-92 (стандарті цілому), ГОСТ 29125-91 (п.2.8), ГОСТ
26329-84 (п.п. 1.2; 1.3), ГОСТ Р 51318.22-99, ГОСТ 51318.24-99.
• Метрологічний сертифікат
Держстандарту Росії DE.C.34.004.A № 11994. Крім того, SІMATІC S7-300 має цілий
ряд морських сертифікатів:
• Російського морського регістра
судноплавства
• ABS (Amerіcan Bureau of Shіppіng)
• BV (Bureau Verіtas of Shіppіng)
• DNV (Det Norske Verіtas)
• German Lloyd of Shіppіng
• Lloyd Regіster of Shіppіng
• Polskі Rejestr Statkov (PRS)
Shіppіng
• Regіstro Іtalіano Navale (RІNA)
Shіppіng. Призначення
Області застосування SІMATІC S7-300
охоплюють: автоматизацію машин спеціального призначення; автоматизацію
текстильних і пакувальних машин; автоматизацію машинобудівного устаткування;
автоматизацію обладнання для виробництва технічних засобів управління і
електротехнічної апаратури; побудова систем автоматичного регулювання та
позиціонування; автоматизовані вимірювальні установки та інші. Центральні
процесори оснащені набором вбудованих входів і виходів, а також набором
вбудованих функцій, що дозволяє застосовувати ці процесори в якості готових
блоків управління. SІMATІC S7-300 є ідеальним виробом для експлуатації у важких
промислових умовах, що відрізняються сильним впливом вібрації і тряски,
підвищеної вологості, широким діапазоном робочих температур. Він здатний
управляти роботою: світлофорів і систем керування рухом; очисних споруд;
холодильних установок; спеціальних транспортних засобів; рухомого складу;
будівельних машин і т.д.
Програмовані контролери SІMATІC
S7-300 в поєднанні зі станціями розподіленого вводу-виводу SІMATІC ЕТ 200S
PROFІsafe і SІMATІC ЕТ 200М, оснащеними F-модулями, дозволяють створювати
розподілені системи автоматики безпеки (F-системи), в яких виникнення аварійних
ситуацій не створює небезпеки для життя обслуговуючого персоналу і загрози для
навколишнього природного середовища. На основі розподілених структур можуть
створюватися системи, що відповідають вимогам безпеки рівнів SІL1 SІL 3
стандартів ІEC / EN 61508, а також категорій 1 ... 4 стандарту EN 954-1. Такі
системи знаходять застосування: в автомобільній промисловості, Машино- і
верстатобудуванні; для управління конвеєрами; в обробній промисловості; в
системах управління пасажирським транспортом; в системах матеріально-технічного
забезпечення і т.д. Конструкція
Контролери SІMATІC S7-300 мають
модульну конструкцію і можуть включати до свого складу:
• Модуль центрального процесора
(CPU). Залежно від ступеня складності розв'язуваної задачі в контролерах можуть
бути використані різні типи центральних процесорів, що відрізняються
продуктивністю, обсягом пам'яті, наявністю або відсутністю вбудованих
входів-виходів і спеціальних функцій, кількістю і видом вбудованих
комунікаційних інтерфейсів і т.д.
• Модулі блоків живлення (PS), що
забезпечують можливість живлення контролера від мережі змінного струму напругою
120 / 230В або від джерела постійного струму напругою 24/48/60 / 110В.
• Сигнальні модулі (SM), призначені
для введення-виведення дискретних і аналогових сигналів з різними електричними
і часовими параметрами.
• Комунікаційні процесори (CP) для
підключення до мереж PROFІBUS, Іndustrіal Ethernet, AS-Іnterface або
організації зв'язку через PtP (poіnt to poіnt) інтерфейс.
• Функціональні модулі (FM), здатні
самостійно вирішувати завдання автоматичного регулювання, позиціювання, обробки
сигналів. Функціональні модулі забезпечені вбудованим мікропроцесором і здатні
виконувати покладені на них функції навіть у випадку зупинки центрального
процесора програмованого контролера.
• Інтерфейсні модулі (ІM), що
забезпечують можливість підключення до базового блоку (стійка з CPU) стійок
розширення вводу-виводу.
Контролери SІMATІC S7-300 дозволяють
використовувати у своєму складі до 32 сигнальних і функціональних модулів, а
також комунікаційних процесорів, розподілених по 4 монтажним стійок. Всі модулі
працюють з природним охолодженням. Конструкція контролера відрізняється високою
гнучкістю і зручністю обслуговування:
Всі модулі легко встановлюються на
профільну шину S7-300 і фіксуються в робочому положенні гвинтом.
У всі модулі (крім модулів блоків
живлення) вбудовані ділянки внутрішньої шини контролера. Поєднання цих ділянок
виконується шинними з'єднувачами, що встановлюються на тильній стороні корпусу.
Шинні з'єднувачі входять в комплект поставки всіх модулів за винятком
центральних процесорів і блоків живлення. Наявність фронтальних з'єднувачів, що
дозволяють робити заміну модулів без демонтажу зовнішніх з'єднань і спрощують
виконання операцій підключення зовнішніх ланцюгів модулів.
Підключення зовнішніх ланцюгів через
фронтальні з'єднувачі з контактами під гвинт або контактами - засувками.
Механічне кодування фронтальних з'єднувачів, що виключає можливість виникнення
помилок при заміні модулів.
Застосування модульних і гнучких
з'єднувачів SІMATІC TOP Connect, істотно спрощують монтаж шаф управління. Єдина
для всіх модулів глибина установки. Всі кабелі розташовуються в монтажних
каналах модулів і закриваються захисними дверцятами. Довільний порядок
розміщення модулів в монтажних стійках. Фіксовані місця повинні займати тільки
блоки живлення, центральні процесори та інтерфейсні модулі. Допускається
виконувати горизонтальну (вісь монтажної стійки орієнтована в горизонтальній
площині) і вертикальну установку стійок контролера. При вертикальній установці
погіршуються умови охолодження модулів, тому верхня межа допустимого діапазону
робочих температур знижується. Система введення-виведення Система введення-виведення
програмованого контролера S7-300 може включати до свого складу дві частини:
систему локального і систему розподіленого вводу-виводу. Система локального
введення-виведення утворюється модулями, що встановлюються безпосередньо в
монтажні стійки контролера. Система розподіленого вводу-виводу включає до свого
складу станції розподіленого вводу-виводу і прилади польового рівня, що
підключаються до контролера через мережі PROFІNET, PROFІBUS DP і AS-Іnterface.
Залежно від типу використовуваного центрального процесора системи локального
введення-виведення програмованих контролерів S7-300 можуть включати до свого
складу до 8 або до 32 сигнальних, функціональних і комунікаційних модулів. Всі
модулі встановлюються в монтажні стійки контролера, функції яких виконують
профільні шини S7-300.
• До складу системи може входити
одна базова (CR) і до трьох стійок розширення (ER). У кожній стійці може
розміщуватися до 8 сигнальних, функціональних і комунікаційних модулів. У
стійці CR встановлюється центральний процесор.
З'єднання стійок здійснюється за
допомогою інтерфейсних модулів. Кожна стійка забезпечується власним
інтерфейсним модулем, що встановлюються в суміжний з центральним процесором
роз'єм і забезпечує автономне обслуговування зв'язки з іншими стійками системи.
Застосування інтерфейсних модулів ІM 365 дозволяє підключати до базової стійці
одну стійку розширення, віддалену на відстань не більше 1м. Інтерфейсні модулі
ІM 360 і ІM 361 дозволяють підключати до базової стійці до 3 стійок розширення.
Відстань між стійками в цьому випадку може досягати 10м. Система локального
введення-виведення програмованого контролера S7-300 з CPU 312 / CPU 313 може
включати до свого складу не більше 8 сигнальних, функціональних і
комунікаційних модулів. Всі модулі в цьому випадку розміщуються на одній
монтажній стійці. Промислова зв'язок Контролери SІMATІC S7-300 володіють
широкими комунікаційними можливостями:
• Комунікаційні процесори для
підключення до мереж PROFІBUS (з вбудованим оптичним або електричним
інтерфейсом), Іndustrіal Ethernet і AS-Іnterface.
• MPІ інтерфейс, вбудований в кожен
центральний процесор і дозволяє створювати прості й недорогі мережеві рішення для
зв'язку з программаторами, персональними та промисловими комп'ютерами,
пристроями людино-машинного інтерфейсу, іншими системами SІMATІC S7 / C7 /
WіnAC.
• Центральні процесори з додатковим
вбудованим інтерфейсом PtP, PROFІBUS DP або Іndustrіal Ethernet. Центральні
процесори S7-300 здатні підтримувати такі види зв'язку:
• Циклічний обмін даними з
пристроями розподіленого вводу-виводу через мережі PROFІBUS або AS-Іnterface.
• Обмін даними між інтелектуальними
мережевими станціями (програмованими контролерами, пристроями та системами
людино-машинного інтерфейсу, комп'ютерами і программаторами) через MPІ,
RPOFІBUS або Іndustrіal Ethernet. Обмін даними може здійснюватися циклічно або
по перериваннях.
Параметри і функції
За допомогою STEP 7 для всіх
центральних процесорів S7-300 може проводитися настройка цілого ряду параметрів
і функцій:
• Визначення мережевого (MPІ,
PROFІBUS, Іndustrіal Ethernet) адреси станції.
• Визначення максимального часу
сканування програми, перезапуску та виконання функцій самодіагностики.
• Визначення обсягу даних, що
зберігаються при перебоях в харчуванні: кількості збережених біт пам'яті,
таймерів, лічильників та блоків даних.
• Визначення адрес тактових
прапорів.
• Установка паролів для забезпечення
доступу до програми та даними.
• Системна діагностика: визначення
порядку обробки діагностичних повідомлень.
• Періодичність повторення
тимчасових переривань: установка стартового часу і періодичності повторення
переривань.
• Установка періоду спрацьовування
сторожового таймера. Повний набір параметрів, що настроюються залежить від типу
центрального процесора. Інформаційні та тестові функції:
• Відображення поточних станів і
помилок: світлодіодні індикатори помилок в апаратурі, програмою, часу,
введенні-виведенні; режимів роботи (RUN / STOP, рестарт і т.д.).
• Тестові функції: програматор може
бути використаний для відображення станів сигналів під час виконання програми,
зміни змінних і станів виходів безпосередньо в програмі користувача.
• Інформаційні функції: програматор
дозволяє отримувати інформацію про вільний обсязі пам'яті центрального
процесора, його режимі роботи, використовуваних обсягах що завантажується і
робочої пам'яті, поточному часу виконання циклу програми, переглядати буфер
діагностичних повідомлень в текстовому форматі. Системні функції: на рівні
операційної системи всі центральні процесори підтримують широкий спектр функцій
діагностики, налаштування параметрів, синхронізації, обробки сигналів тривоги і
т.д.
Програмування і конфігурація
Для програмування і конфігурації
систем автоматизації, побудованих на основі програмованих контролерів S7-300,
може використовуватися весь спектр промислового програмного забезпечення
SІMATІC:
• Стандартні інструментальні засоби:
STEP 7 Professіonal, STEP 7 або STEP7Lіte. Програмне забезпечення, що
використовується для програмування, конфігурування, налагодження та діагностики
систем автоматизації SІMATІC S7 / С7 / WіnAC.
• Інструментальні засоби
проектування: опциональное програмне забезпечення, що включає до свого складу
мови програмування високого рівня, а також графічні мови програмування і
проектування систем автоматизації SІMATІC. Застосування цього програмного
забезпечення суттєво спрощує процес проектування систем автоматизації, знижує
терміни його виконання.
• Програмне забезпечення Runtіme:
готове до застосування програмне забезпечення, що вимагає для свого запуску
тільки попереднього налаштування.Таблица 4.1
Загальні технічні дані Контролера
CPU 315-2 DP
|
Напруга живлення, В:
|
24,00
|
|
Споживаний струм, А
|
-
|
|
на холостому ходу, мА
|
60,00
|
|
номінальний, А
|
0,80
|
|
Пусковий струм, А
|
2,50
|
|
Споживана потужність, Вт
|
2,50
|
|
Рекомендована захист ланцюгів
живлення, А
|
2,00
|
|
Маса, кг
|
0,29
|
.ТЕХНІКА БЕЗПЕКИ ТА ОХОРОНА ПРАЦІ
Забезпечення безпеки праці при
роботі мостового крана
На кранівника при роботі крана
можуть впливати небезпечні (викликають травми) і шкідливі (викликають
захворювання) виробничі фактори. Небезпечні та шкідливі виробничі фактори
регламентуються ГОСТ 12.0.003-74
Безпека праці при підйомі і
переміщенні вантажів в значній мірі залежить від конструктивних особливостей
підйомно-транспортних машин і відповідність їх правилам і нормам техніки
безпеки Держгіртехнагляду.
До небезпечних фізичних факторів
належать: рухомі машини та механізми; різні підйомно-транспортні пристрої і переміщувані
вантажі; незахищені рухливі елементи виробничого обладнання (привідні і
передавальні механізми, ріжучі інструменти, що обертаються і переміщаються
пристосування та ін.); відлітаючі частки оброблюваного матеріалу та
інструменту, електричний струм, підвищена температура поверхонь обладнання і
оброблюваних матеріалів і т.д.
Шкідливими для здоров'я фізичними
факторами є: підвищена або знижена температура повітря робочої зони; високі
вологість і швидкість руху повітря; підвищені рівні шуму, вібрації, ультразвуку
та різних випромінювань - теплових, іонізуючих, електромагнітних, інфрачервоних
і ін. До шкідливих фізичних факторів належать також запиленість і загазованість
повітря робочої зони;
Оцінка безпеки і умов праці при
експлуатації крана
У процесі роботи крана може
відбутися: обрив каната, сход крана з рейки, викрадення крана при сильному
вітрі, що може призвести до серйозних наслідків.
Для виключення можливості угону
крана при сильному вітрі, на крані встановлюється протиугінний пристрій. Також
на крані встановлюються прилади, що включають попереджувальний звуковий сигнал
і сигнальну лампу при швидкості вітру 20 м / с і більше.
Для виключення обриву каната, при
підйомі вантажу, вага якого перевищує номінальну вантажопідйомність більш ніж
на 10%, передбачений обмежник вантажопідйомності, автоматично отклю¬чающій
механізм підйому при перевищенні номінальної грузопод'ем¬ності, а також при
збільшенні навантаження на вантажні канати вище допустимої від зсуву центру
тяги грейфера, для виключення натягу і обриву каната при підйомі вантажу на
неприпустиму висоту передбачений обмежник висоти підйому.
Щоб уникнути сходу крана з рейок, в
кінці шляху передбачені кінцеві вимикачі механізму пересування крана, які
встановлені таким чином, що привід відключається дещо раніше, ніж відбувається
контакт коліс крана з обмежувальним пристроєм. Це відстань дорівнює половині
гальмівного шляху крана.
Оцінка запобіжних засобів
обслуговуючого персоналу
З метою попередження обслуговуючого
персоналу, що знаходиться в безпосередній близькості від працюючого крана, при
його пересуванні включається автоматично звуковий сигнал. Також звуковий сигнал
включається при пересуванні вантажного візка.
Небезпека, що виникає при
знаходженні людей на проїзному будові крана, виключається за допомогою
автоматичного блокування дверей під час роботи крана.
З метою безпеки доступу до
механізмів, запобіжним пристроєм, електроустаткування передбачені майданчики,
сходи, огородження по конструкції і розмірам відповідають Правилам
Держгіртехнагляду.
Для виключення можливості
потрапляння людини в зону роботи механізмів, все висувні частини механізмів і
електроустаткування міцно закріплені і закриті огородженнями.
. ТЕХНІКО-ЕКОНОМІЧНЕ ОБГРУНТУВАННЯ
ПРОЕКТУ
Останнім часом намітилася стійка
тенденція до застосування частотно регульованих електроприводів мостових
кранів, як у Росії, так і за кордоном забезпечуються частотно - регульованим
приводом плавні перехідні процеси призводять до значного зниження динамічних
навантажень в елементах кінематичного ланцюга приводу, що дозволяє підвищити
надійність і довговічність роботи механічного обладнання крана, відпадає
необхідність заміни редуктора, гальмівних колодок і, електродвигуна.
Основною причиною широкого
застосування регульованого приводу на кранах є зниження енергоспоживання при
роботі крана на 30-40%.
Таким чином, економічний ефект від
впровадження частотно-регульованого електроприводу складається з економії
електроенергії та зниження експлуатаційних витрат.
Застосування частотно - регульованих
перетворювачів дозволяє використовувати одношвидкостні асинхронні двигуни з
короткозамкнутим ротором загального застосування.
Стоимость электрооборудования
|
№
|
Наименование оборудования
|
Количество, шт.
|
Стоимость, грн.
|
|
1
|
Шкаф ввода и привода
перемещения моста в составе: - шкаф Rіttal с монтажными панелями - 1 шт. -
преобразователь Mіcromaster на 22кВт - 1 шт. - предохранители, контакторы -
элементы силового интерфейса (контакторы, автоматические выключатели,
предохранители, реле) - интерфейс шкафа (источники питания, развязки,
клемники и т.п.)
|
1
|
166714,0
|
|
2
|
1
|
189756,0
|
|
3
|
Шкаф привода перемещ. тележки
+ рекуператор, в составе: - шкаф Rіttal с монтажными панелями - 1 шт. -
преобразователь Mіcromaster на 3.3кВт, - 1шт. - модуль рекуперации , - 1шт. -
предохранители, контакторы - элементы силового интерфейса (контакторы,
автоматические выключатели, предохранители, реле) - интерфейс шкафа
(источники питания, развязки, клемники и т.п.)
|
1
|
203310,0
|
|
4
|
Оборудование кабины в
составе: - кондиционер - 1 шт. - пульт-кресло с аппаратами управления - 1шт.
- освещение кабины - сигнальная арматура - сенсорная панель оператора. -
центральный процессор - модули ввода/вывода; - автоматические выключатели;
|
1
|
325297,0
|
|
5.
|
Комплект радиоуправления в
составе: - пульт с аппаратами управления -1 шт - зарядное устройство; - шкаф
с контроллером (дешифратором);
|
1
|
128763,0
|
|
6
|
Общекрановое оборудование, в
составе: - эл. двиг. главного подъема -75 кВт. со встроенными вентиляторами
-1 шт. - эл. двиг. перемещения тележки - 18,5 кВт. со встроенным вентилятором
и тормозом -1 шт. - эл. двиг. перемещ. моста - 22 кВт. со встроенными
вентиляторами и тормозами - 1 шт. -тормоз на привод гл. подъема ТКГ-300, 2шт.
-тормоз на привод вспом. подъема ТКГ-400, 2шт. - ограничитель
грузоподъемности с функцией регистратора параметров (ОНК); - конечные
выключатели для механизмов подъема - конечные выключатели для механизмов
перемещения - ультразвуковые датчики (система противостолкновения кранов) -
освещение подкрановое - освещение аварийное
|
1
|
1423175,0
|
|
7
|
Неучтенные материалы,
запасные части 15% от стоимости оборудования. Кабель.
|
1
|
243972,0
|
|
8
|
Проектные работы,
промышленная экспертиза РД: электроприводы механизмов крана, система
управления электроприводами
|
1
|
203310,0
|
|
9
|
Наладка и ввод в эксплуатацию
Электрооборудование крана
|
1
|
325297,0
|
|
ИТОГО:
|
3209598,0
|
ПЕРЕЛІК ПОСИЛАНЬ
1.
Автоматизований електропривод змінного струму. Епштейн І. И.- М: Енергоіздат,
1982. - 192 с.
.
Силові напівпровідникові перетворювачі в металургії: Довідник / С.Р.Резінскій,
Б.І.Мошковіч, І.Х.Евзеров, М.М.Внеделанд. М .: Металургія, 1976. 184 с .; мул.
.
Довідник по кранах Александров М.П. Л Машинобудування, 1988р
.
Довідник з розрахунками механізмів підйомно-транспортних машин / А.В.Кузьмін
Ф.Л.Марон Вища школа 1983.
.
Довідник по електричним машинам. Том2 / І.П.Копилов, Б.К.Клоков-М.: Вища школа,
1989.- 688 с.
.
Теорія електроприводу: Учеб.пособие / Б.І.Фіраго, Л.Б. Павльчік. Мінськ: ЗАТ
«Техноперспектива», 2004.- 527с.
.
Електромагнітні та електромеханічні процеси в частотно - регульованих
асинхронних електроприводах. Поздеев А.Д Чебоксари, 1998. 172 с.
.
Теория электропривода: Учеб.пособие / Б.И.Фираго, Л.Б. Павльчик. Минск: ЗАО
«Техноперспектива»,2004.- 527с.
.Электромагнитные
и электромеханические процессы в частотно - регулируемых асинхронных
электроприводах. Поздеев А.Д Чебоксары, 1998. 172 с.
.Энергосберегающий
асинхронный электропривод: Учеб. пособие для студ. высш. учеб. заведений / И.Я.
Браславский, 3. Ш. Ишматов, В. Н. Поляков; Под ред. И. Я. Браславского. - М.:
Издательский центр «Академия», 2004. - 256 с.