|
Шифр
|
Вид внешнего воздействия
|
Наименование
|
K, 1/сек2
|
T1, сек
|
T2, сек
|
R, н
|
|
3-9-8
|
M=1(t)
|
Момент оси рулона
|
1
|
0.25
|
0.1
|
0.3
|
Удельный вес бумаги =600 кг/м³
Ширина рулона b=1,68 м
Начальный радиус рулона Rн=0,45 м
Конечный радиус рулона Rк=0,06 м

2. Принципиальная схема САР и ее краткое описание
.1 Понятие об автоматизации производственного процесса
Производственный процесс представляет собой совокупность операций,
выполняемых в определенной последовательности при согласованном взаимодействии
людей, машин, средств управления, в результате чего из исходного материала
получают готовое промышленное изделие.
Любой производственный процесс характеризуется определенными
энергетическими затратами и выполнением различных операций контроля и
управления.
Освобождение человека от энергетических затрат или замена физического
труда человека машинами, устройствами называется механизацией производственного
процесса.
Освобождение человека одновременно от энергетических затрат и выполнения
операций контроля и управления процессом в результате возложения этих функций
на специальные устройства и системы управления называется автоматизацией
производственного процесса.
Таким образов, механизация процесса всегда предшествует автоматизации,
являясь ее предпосылкой.
В машинах, заменяющих труд человека, обработка изделия происходит без его
участия. Если повторная операция обработки требует вмешательства человека
(например, для установки и съема готовой продукции, пуска машины), такое оборудование
называется полуавтоматом. Если в машине подача заготовки и ее съем выполняется
без участия человека, такую машину называют автоматом. Характерными примерами
из области полиграфического производства могут служить печатные, отливные
автоматы и т.д.
Группа машин-автоматов, объединенных общими транспортными устройствами с
единым режимом и системой управления, образует автоматическую линию.
В зависимости от того, часть операций или все операции контроля и
управления процессом автоматизированы, различают частичную и полную
автоматизацию.
При полной или комплексной автоматизации все операции производственного
процесса осуществляются без вмешательства человека в работу оборудования. В его
обязанности входит включение и выключение машины, ее настройка, наблюдение за
работой.
Автоматизация есть высшая форма механизации производственных процессов.
Преимущества автоматизированного производства можно рассматривать в двух
аспектах: социальном и экономическом.
Социальная эффективность автоматизации заключается в улучшении условий
труда человека и повышении культуры производства. Автоматизация производства
создает условия для стирания различия между умственным и физическим трудом.
Экономическая эффективность автоматизации определяется повышением
производительности труда, качества продукции и снижением ее себе-стоимости.
Системы автоматического управления, изучению которых посвящается данная
работа, представляет наиболее совершенную форму автоматизации. Характер и объем
задач, решаемых с их помощью, могут быть весьма различны. В одном случае
объектом управления служит отдельный участок производственного процесса (
например, регулирование температуры гарта в котле линотипа, натяжения бумажного
полотна в рулонной печатной маши-не), в другом случае объектом управления являются
целое предприятие, отрасль промышленности, народное хозяйство всей страны.
Выполнение сложнейших функций управления в последнем случае стало возможным
благодаря использованию быстродействующих ЭВМ. Изучение подобных систем
управления выходит за пределы данного курса.
.2 Понятие о системе автоматического управления.
Системой автоматического управления называется совокупность двух основных
элементов: объекта управления и автоматического управляющего устройства
(рис.1).
Объектом управления может быть любая динамическая система, параметры
которой, определяющие ее состояние, могут изменяться во времени под влиянием
различных внешних воздействий. В качестве простейшего примера объекта
управления рассмотрим котел линотипа с расплавленным гартом. Состояние такого
объекта определяется двумя основными параметрами: температурой гарта и его
уровнем в котле. Под влиянием различных внешних факторов (нестабильность
напряжения при работе термоэлектрических нагревателей котла, колебания
температуры окружающей среды и т.д.) температура гарта будет изменяться во
времени. Уровень же сплава изменяется каждый раз в процессе его отбора при
отливе очередной строки.
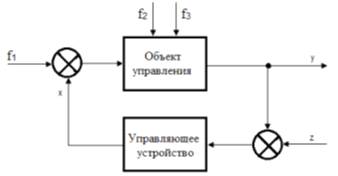
Рис.1. Элементарная блок-схема САУ.
Другим примеров объекта управления может служить машинный агрегат,
включающий в себя двигатель, трансмиссию и исполнительный механизм. Параметром,
определяющим состояние данного объекта, является угловая скорость вращения вала
двигателя, которая может изменяться, например, при отклонении момента
соприкосновения, оказываемого двигателю исполнительным механизмом.
Сам объект управления, как правило, не обладает способностью
самостоятельно поддерживать или изменять по заданному закону требуемые значения
параметров, изменяющихся под влиянием внешних возмущений.
Для устранения влияния этих возмущений на объект управления подаются
управляющие воздействия, вырабатываемые специальным устройством-регулятором.
Цели управления объектами могут быть весьма различны. В простейшем случае
задача управления заключается в поддержании постоянного за-данного значения
параметра объекта ( температуры сплава в котле линотипа, его уровня, скорости
вращения вала двигателя в машинном агрегате и т.д.). необходимость стабилизации
параметров в упомянутых случаях объясняется рядом объективных причин. Например,
при снижении температуры гарта относительно заданного значения уменьшается
жидкотекучесть сплава, что приводит к ухудшению качество отливаемых строк. При
увеличении же температуры начинается выгорание компонентов сплава.
Необходимость стабилизации угловой скорости вала машинного агрегата,
например, системы "тепловой двигатель- генератор переменного тока"
обусловлена требованием поддержания постоянства напряжения и частоты тока
генератора.
В других случаях один или несколько параметров объекта необходимо
изменять во времени по определенному закону-программе (изменение давления при
горячем матрицировании на матричном прессе, температуры в закалочной печи и
т.д.).
В рассмотренных примерах задача управления решается с помощью средств,
образующих в совокупности с объектом управления соответственно систему
стабилизации, программного управления и следящую систему. разновидность этих
систем называют системами автоматического регулирования (САР). В САР закон
изменения регулируемого параметра задается законом изменения входной величины.
Это является их характерным признаком.
За последние годы получил значительное развитие другой класс систем
автоматического управления - адаптивных (самоприспосабливающихся). В этих
системах состояние объекта управления характеризуется некоторым показателем
качества, который является функцией одного или нескольких параметров объекта
управления. Целью управления в адаптивной САУ является поддержание
экстремального значения показателя качества в условиях постоянно действующих на
объект внешних возмущений и при возможном изменении характеристик объекта. На
рис. 2 приведена краткая классификация САУ.

Рис. 2.
В данном курсе будут рассматриваться, главным образом, системы
регулирования (в основном - системы стабилизации).
.3 Объекты регулирования
Разработке любой САР предшествует анализ динамических свойств объекта
регулирования, являющегося основным элементом системы, определяющим задачу
регулирования и выбор типа регулятора.
Состояние объекта определяется рядом величин, характеризующих воздействие
на объект внешних возмущений и управляющих сигналов. В общем случае объект
регулирования может быть представлен схемой, показанной на рис.3.
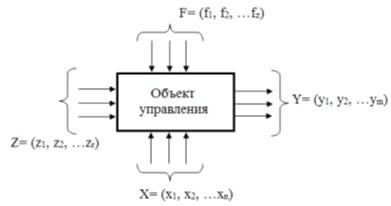
Рис. 3.
Вектор Z= (z1, z2, … zr) на схеме представляет совокупность
контролируемых воздействий, приложенных к объекту, т.е. воздействий,
поддающихся непрерывному измерению в процессе работы.
Вектор F= (f1, f2, … fz) характеризует неконтролируемые (неизмеряемые)
воздействия.
Векторам X= (x1, x2, … xn) и Y= (y1, y2, … ym) соответствуют управляющие
воздействия и регулируемые параметры.
В дальнейшем будем рассматривать объекты с одним регулируемым параметром.
Зависимость регулируемого параметра от внешних воздействий в динамике
представляется, как правило, в форме дифференциального уравнения. При известных
начальных условиях и заданных внешних воздействиях Z(t), F(t), X(t) решение
дифференциального уравнения позволяет определить ре-акцию объекта Y(t) на
изменение внешних воздействий.
Статическая характеристика объекта представляет зависимость регулируемого
параметра "Y" от внешних воздействий Z, F, X при их установившихся
(постоянных) значениях.
Не смотря на бесконечно большое разнообразие объектов управления,
отличающихся физической природой и степенью сложности, можно разделить их на
три типа: устойчивые, неустойчивые и нейтральные.
Объект устойчив, если после окончания внешнего воздействия параметр,
определяющий его состояние, принимает прежнее значение или близкое к нему. Такие
объекты иногда называют объектами с самовыравниванием. Понятие статической
характеристики применимо только к объектам этого типа.
В неустойчивом объекте по окончании воздействия, как бы мало оно ни было,
управляемый параметр продолжает изменяться.
В нейтральных объектах по окончании воздействия управляемый параметр
принимает новое значение, отличное от первоначального, или изменяется с
постоянной скоростью.
Для всех трех случаев можно предложить механическую аналогию в виде
шарика в лунке (рис. 4.а, б, в).

Рис. 4.
.4 Принципы автоматического регулирования
При решении задачи управления объектом (стабилизации регулируемого
параметра, программном управлении, адаптивном управлении, предусматривающем
самонастройку системы на оптимум какого-либо параметра) возникает вопрос, как и
какими средствами управлять объектом.
Рассмотрим возможные способы решения этой задачи.
В предыдущих параграфах данного раздела отмечалось, что причиной
изменения регулируемых параметров объектов являются различные внешние
воздействия (контролируемые и неконтролируемые). Если допустить существование
для какого-либо объекта только контролируемых воздействий, а динамические
свойства объекта считать известными, возникает идея компенсации вредного влияния
какого-либо воздействия путем измерения последнего и в зависимости от
результатов измерения выработать и подать на вход объекта регулирующее
воздействие, обеспечивающее достижение цели управления.
Рассмотренный способ составляет содержание принципа регулирования по
возмущению. Для технической реализации этого принципа, очевидно, необходимы
следующие устройства:
) средство измерения возмущающего воздействия;
) усилительный элемент, если сигнал измерительного устройства не обладает
достаточной мощностью;
) устройство для создания регулирующего воздействия на объект.
Все эти устройства называются соответственно чувствительными,
усилительными и исполнительными элементами и составляют в целом регулирующее
устройство или регулятор.
На рис.5 показана функциональная схема системы, работающей по принципу
регулирования по возмущению.
Рис. 5.
Регулирующее воздействие "х", вырабатываемое регулятором на
основании результата измерения возмущающего воздействия "x", полностью нейтрализует его,
обеспечивая инвариантность (независимость) регулируемой величины "y"
от воздействия "x".
Основными недостатками САР, работающих по возмущению, являются следующие:
а) инвариантность регулируемой величины обеспечивается только по
отношению к отдельному измеряемому возмущению ("f" на рис.5);
достижение независимости "y" от других возмущений возможно только
лишь при наличии отдельных регуляторов по каждому возмущению, что сильно
усложняет САР; кроме того, далеко не во всех случаях внешние возмущения
поддаются измерению;
б) инвариантность регулируемой величины обеспечивается только лишь при
строгом соответствии параметров регулятора и объекта их расчетным данным.
В рассматриваемых системах регулирования величина "y" не
контролируется. Регулирующее воздействие "x" от регулируемой величины
"y" не зависит. Системы такого типа называются разомкнутыми.
Из-за отмеченных выше недостатков САР по возмущению в самостоятельном
виде почти не применяется. Применение данного принципа регулирования в
сочетании с другим, рассмотренном ниже способом управления, позволяет создать
весьма эффективные САР, называемые комбинированными.
Широкое применение получил принцип построения САР по отклонению
регулируемой величины. Функциональная схема такой системы показана на рис.6.
Рис.6.
В этой системе регулирования величина "y" измеряется
чувствительным элементом "ЧЭ" и поступает на элемент сравнения
"ЭС". На другой вход элемента сравнения поступает сигнал задающего
воздействия "z". разность e = z - y, называемая сигналом ошибки,
поступает на усилительно-преобразовательный элемент "УЭ" и затем на
вход исполнительного элемента "ИЭ". Регулирующее воздействие
"х", получаемое на выходе исполнительного элемента и приложенное к
объекту регулирование, вызывает изменение регулируемой величины "y"
таким образом, чтобы свести ошибку "x" к нулю.
Величина "у" будет изменяться по закону, заданному на входе
элемента сравнения "ЭС" в виде сигнала "z". При z = z0 = const
будет решаться задача стабилизации регулируемой величины "у". Если
задающее воздействие представляет собой детерминированную функцию времени,
выполняется задача программного управления.
Возмущающие факторы f1,
f2, f3
относятся к виду
вредных внешних воздействий и подлежат ликвидации с помощью САР.
Задающее воздействие "z" относится к виду полезных внешних
воздействий.
Чувствительный, усилительно преобразовательный и исполнительный элементы
образуют в совокупности, как и в САР по возмущению, автоматический регулятор.
Так как входным сигналом регулятора является регулируемая величина
"у", а регулирующее воздействие формируется в результате вычитания
"у" из сигнала "z" (с последующим преобразованием разности e = z - y ),
элементы регулятора образуют так называемую обратную связь. Наличие обратной
связи делает САР замкнутой.
Основным преимуществом САР, работающих по принципу отклонения
регулируемой величины, является их способность выполнять задачу регулирования
при любом количестве внешних воздействий (контролируемых и неконтролируемых).
Это становится возможным благодаря тому, что ни одно внешнее возмущение не
измеряется. Измеряется лишь регулируемая величина.
Второе преимущество САР этого типа состоит в отсутствии жестких
требований к стабильности характеристик объекта управления и регулятора.
Недостатком данных САР является заложенная в самом принципе регулирования
возможность существования ошибки e = z - y, формирующей регулирующее
воздействие "х", предназначенное для ликвидации этой ошибки. Кроме
того, такие системы обладают склонностью к колебаниям, сложны в расчете.
Рассмотренные ранее системы регулирования по возмущению не обладают
указанными недостатками. Стремление объединить преимущества САР того и другого
типов привело к созданию комбинированных САР, обладающих высокими
эксплуатационными качествами.
Функциональная схема комбинированной САР приведена на рис.7.
Приведенная САР представляет собой комбинацию двух систем: разомкнутой,
работающей по принципу возмущения, и замкнутой, работающей по принципу
отклонения регулирующей величины. Первая САР обеспечивает инвариантность
величины "у" к одному, наиболее сильному возмущению "x". Влияние других возмущений
компенсирует САР, работающая по ошибке.
Рис.7.
2.5 Примеры систем автоматического регулирования
Рассмотрим некоторые примеры САР различными технологическими процессами в
полиграфии.
.5.1 САР уровня краски
В печатных машинах, работающих на жидкой краске (газетные рота-ции,
машины глубокой печати) осуществляется непрерывная подача краски к раскатным
цилиндрам с помощью плунжерного насоса. Для обеспечения нормальной работы
насоса уровень краски в резервуаре должен быть постоянным. Стабилизация уровня
краски выполняется с помощью системы, принципиальная схема которой показана на
рис. 8.
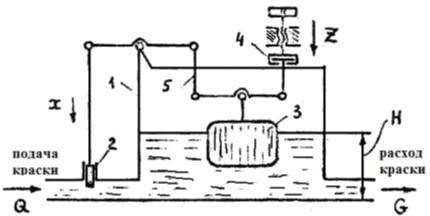
рис. 8.
Краска в резервуар (1) поступает из центральной красочной станции. Ее
подача в резервуар регулируется краном (2). Уровень краски "Н"
контролируется поплавком (3). При уменьшении уровня, вызванном, например,
расходом краски "G", поплавок опускается и через рычажную систему (5)
открывает кран (2). Подача краски в резервуар "Q" увеличивается, ее
уровень поднимается. Так происходит автоматическая компенсация влияния на
регулируемую величину "Н" внешнего воздействия "G". Винт
(4) служит в качестве задающего устройства. На рис. 9. показана функциональная
схема САР.

рис. 9.
.5.2 Система стабилизации натяжения бумажного полотна
Принципиальная схема системы представлена на рис. 10.
Назначение системы состоит в обеспечении стабильности натяжения бумажного
полотна, сматываемого с рулона и поступающего в печатный аппарат машины.
Объектом регулирования в рассматриваемой системе является совокупность
двух механических элементов - рулона (1) и "плавающего"
амортизационного валика (4), соединенных между собой бумажной лентой.
Электромагнитная фрикционная муфта (12), работающая в режиме постоянного
скольжения, осуществляет осевое торможение рулона, создавая
этим требуемую силу натяжения бумажного полотна F = ^т/д, где Мт -
тормозной момент, R -
радиус рулона.
Натяжение в ветвях бумажного полотна, охватывающего амортизационный
валик, уравновешивается силой давления воздуха в пневмоцилиндрах (3),
соединенных с ресивером (2), благодаря которому давление в пневмоцилиндрах при
перемещении поршня остается практически постоянным. состояние равновесия в
системе "рулон- амортизатор" определяется равенством 2F = N, где N -
усилие на поршнях, приведенное к оси амортизационного валика (направление силы N принимаем параллельным ветвям
бумажного полотна). Объект регулирования подобного типа является нейтральным и
его равновесие или устойчивость могут быть нарушены в результате приложения
любого, даже малого по величине внешнего воздействия. В этом случае нормальная
работа бумагопроводящей системы возможна только лишь после присоединения
регулирующего устройства, обеспечивающего необходимую устойчивость системы.
Рассмотрим элементы, составляющие цепь регулятора.
Измерительным устройством регулятора служит потенциометр (8), движок
которого связан со шкивом (6). Последний приводится в движение тросиком (5),
присоединенным к рычагу амортизатора. Пружина (7) обеспечивает натяжение
тросика и возможность реверсивного вращения шкива (6).
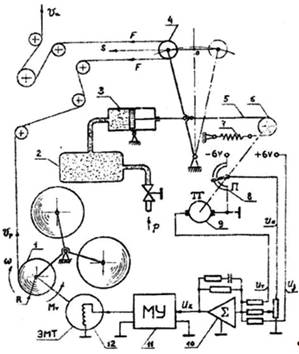
рис. 10.
2.6 Классификация САУ
Основной признак классификации САУ, определяющий цель управления, уже
рассматривался в пункте 2. Согласно этому принципу все САУ подразделяются на
два большие класса: ^приспосабливающиеся САУ (САР) и приспосабливающиеся
(адаптивные) САУ. Так как основное внимание в данном курсе лекций уделяется
только системам первого класса, классификация будет рассматриваться
применительно к САР.
В зависимости от того, контролируется или нет управляемая величина,
различаются разомкнутые и замкнутые САР. Наибольшее распространение получили
САР замкнутого типа.
Принимая во внимание характер изменения задающего воздействия, все САР
замкнутого типа можно разделить на системы стабилизации, программного управления
и следящие системы. необходимо заметить, что программное управление часто
осуществляется и системами разомкнутого типа.
По характеру взаимной зависимости между входными воздействиями и
регулируемой величиной САР бывают линейными и нелинейными. Методы анализа
нелинейных систем, описываемых нелинейным дифференциальным уравнением,
отличаются большой сложностью и еще недостаточно разработаны.
По принципу формирования сигналов различаются системы непрерывные и
дискретные.
На рис.11. приведена упрощенная классификационная схема САУ.
рис. 11.
3. Уравнение динамики замкнутой САР
Согласно схеме на рис.1 входными параметрами регулятора является
регулируемая величина "S" и задающее воздействие "Uз", а
выходным параметром - тормозной момент "Мт", создаваемый
исполнительным устройством.
Считая исполнительный и усилительный элементы цепи регулятора
инерционными звеньями, уравнение динамики регулятора запишем предварительно в
следующем виде где
4. Структурная схема САР
Структурная схема САР показывает виды звеньев, из которых она состоит, и
способы их соединения между собой (рис. 12.). Все звенья на схеме условно
изображаются в виде прямоугольников. Внутри которых записываются их
передаточные функции. Связи между звеньями выполняются в виде прямых линий со
стрелками, указывающими направление передачи сигналов. В качестве примера на
рис. показана структурная схема САР натяжения бумажного полотна.
рис. 12
Наличие структурной схемы значительно упрощает процедуру составления
уравнения динамики САР.
Используя формулы, служащие для нахождения передаточных функций основных
соединений звеньев, находят передаточные функции объекта регулирования по
регулирующему воздействию W0 и внешнему воздействию Wf, а также передаточную
функцию регуляторов Wрег. При этом передаточная функция разомкнутой системы
определится формулой:

а передаточная функция замкнутой системы по выбранному внешнему
воздействию будет иметь вид:
При нахождении передаточной функции разомкнутой САР по структурной схеме
все внешние воздействия принимаются равными нулю. нетрудно заметить, что Wp
является функцией безразмерной, т.е. [Wp ]=I. В теории автоматического
регулирования понятие Wp имеет большое самостоятельное значение.
Передаточная функция замкнутой САР "Wz " есть отношение изображения по Лапласу регулируемой
величины Y(p) к изображению по Лапласу внешнего воздействия F(p) при нулевых
начальных значениях функций y(t) и f(t) и их производных

Если в качестве внешнего воздействия рассматривается задающее z(t), то
данная передаточная функция называется основной или главным оператором САР.
5. Расчетная часть




Список литературы
1. Автоматика и автоматизация производственных процессов
в полиграфии. Конспект лекций. С.С. Селезнев. Омский политехнический институт.
Новосибирск.1976.
. Автоматизация проектирование систем и средств
управления. Задания и методические указания к курсовой работе. Солонец В.И.,
Солонец И.П., Селезнев С.С. Моск. гос. ун-т печати. - М.: МГУП, 2012.-23 с.
. Бесекерский В. А., Попов С. П. Теория систем
автоматического регулирования. Изд - во "Наука", 1972 г.