Разработка цифровой системы автоматического управления технологической установкой
Содержание
Введение
. Разработка функциональной схема системы
. Дискретная передаточная функция объекта
. Структурная схема объекта
. Выбор периода дискретизации аналоговых
сигналов
. Обоснование способа ввода информации
. Выбор технических средств
. Учёт запаздывания и корректировка его влияния
. Разработка алгоритма работы системы
. Аналитическое исследование
. Моделирование системы
Выводы
Литература
Введение
Системы автоматического управления за долгий
путь своего развития от центробежных регуляторов паровых машин до современных
комплексных САУ подвижными объектами проникли во все области техники и стали
решающими при создании многих современных технических средств и устройств.
Как известно в САУ выделяют следующие основные
устройства, из которых она состоит.
Объект управления (регулирования),
представляющий собой машину, аппарат или установку, требуемый режим работы,
которых должен поддерживаться.
Регулятор или управляющая часть САУ,
поддерживает требуемый режим работы объекта управления либо изменяет этот режим
в соответствии с заданным законом или программой управления. Регулятор, в свою
очередь, включает в себя следующие устройства.
Измерительные и чувствительные устройства,
предназначенные для измерения и преобразования регулируемых величин или возмущающих
воздействий разнообразного физического происхождения в сигналы передаваемые и
используемые в САУ.
Программные или задающие устройства
предназначены для выработки сигналов, меняющихся по заранее определённому
закону.
Усилительно преобразующие устройства,
предназначенные для усиления сигналов, проходящих в регуляторах. Эти устройства
преобразуют сигналы и управляют энергией, поступающей от внешнего источника в
управляющие воздействия различного физического происхождения.
Корректирующие устройства служат для обеспечения
требуемых характеристик по устойчивости, качеству и точности управления.
Исполнительные устройства осуществляют
непосредственное воздействие на объект управления.
Согласно заданного варианта № 8 исходные
параметры системы представлены в таблице 1.
Таблица 1. Исходные параметры системы
|
№
варианта
|
Передаточная
функция
|
Коэффициент
передачи
|
Постоянные
времени
|
Масса
компонентов, кг, max
|
Заданная
температура
|
Время
|
Точность
измерения δн, %
|
|
|
по
управляющему воздействию
|
по
возмущающему воздействию
|
T2, с
|
Т1,
с
|
Запаздывание,
с
|
N1
|
N2
|
tзад1, C°
|
tзад2, C°
|
К,
час
|
δм,
%
|
δt,
%
|
|
8
|
б)
|
36
|
21
|
12.5
|
28.3
|
2
|
170
|
120
|
120
|
160
|
5
|
15
|
5
|
1. Разработка функциональной схемы системы
Согласно заданного варианта № 8, функциональная
схема системы химического реактора изображена на рис. 1.
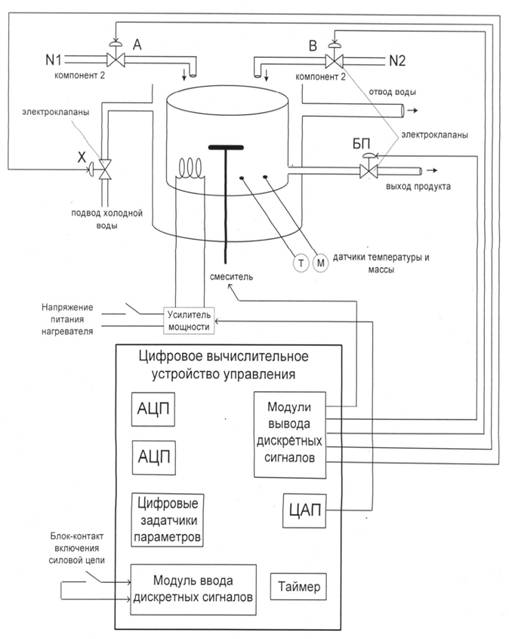
Рис. 1. Функциональная схема системы химического
реактора
Она состоит из следующих элементов:
электроклапаны А, В, Х, БП
усилитель мощности
датчики температуры Т и массы М
нагревателя
аналогово-цифровой преобразователь АЦП
цифровой задатчик параметров
цифровой задатчик
модуль ввода дискретных сигналов
модуль вывода дискретных сигналов, - таймер
Технологический процесс приведённой выше схемы
следующий:
В химический реактор загружается определённое N1
количество первого компонента - устанавливается задатчиком 1. Включается
смеситель. После этого загружается определённое количество N2
второго компонента - устанавливается задатчиком 2. Включается нагрев реактора,
доводится температура до tзад1
и поддерживается на этом уровне в течении времени К - устанавливается
задатчиком 3. После этого выключается смеситель и включается охлаждение
реактора. Когда температура достигнет значения tзад2,
прекращается охлаждение и сливается полученный продукт. После слива продукта
процесс повторяется до тех пор, пока включен автомат силовой цепи нагревателя.
Можно полагать, что за время слива продукта температура в реакторе снизится на
1/3 от tзад2.
Загрузка компонентов и выпуск продукта
производится с помощью соответствующих клапанов (задвижек), которые приводятся
в состояние открыто/закрыто с помощью дискретных сигналов.
Возмущение - загрузка компонентов - происходит
скачкообразно.
Точность задания:
количество компонентов N1,
N2 - δм
измерение температуры - δt
Для математического расчёта и моделирования
составим следующую функциональную схему системы химического реактора
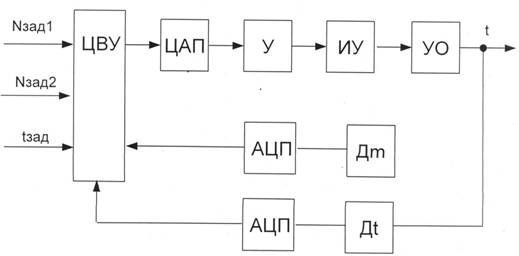
Рис. 1а. . Функциональная схема системы
химического реактора
Она состоит из следующих элементов:
Nзад1 - задатчик
первого компонента
Nзад2 - задатчик
второго компонента
tзад - задание
температуры
АЦП - аналого-цифровой преобразователь
ЦВУ - цифровое вычислительное устройство
ЦАП - цифро-аналоговый преобразователь
У - усилитель мощности
ИУ - исполнительное устройство
УО - часть управляемого объекта
Дt
- датчик температуры
. Дискретная передаточная функция объекта
Дискретную передаточную функцию разомкнутой
системы можно определить по формуле:

где  -
передаточная функция объекта в виде обычного преобразования Лапласа.
-
передаточная функция объекта в виде обычного преобразования Лапласа.
Для получения Z-изображения
используем передаточные функции с таблиц соответствий [1].
По условию курсовой работы объект управления
представлен передаточной функцией следующего вида:



Подставляя числовые значения в (2) и (3) получим



3. Структурная схема объекта
Структурную схему (рис. 2) можно представить
колебательным звеном (описывающее объект управления) и регулятором. В качестве
регулятора применим ПИД-регулятор, который рекомендуется использовать для
такого объекта, он обеспечит заданную точность регулирования и высокое
быстродействие системы.

Рис. 2. Структурная схема объекта и
ПИД-регулятора
. Выбор периода дискретизации аналоговых
сигналов
Период дискретизации сигнала - это частота
преобразования функции непрерывных переменных в функции дискретных переменных,
которая обеспечит точное (с малой погрешностью) представление исходной
непрерывной функции. Для данной системы необходимо преобразовать сигнал с
усилителя в цифровой код для последующей обработки данных процессором. Для
нахождения периода дискретизации используем теорему Котельникова - Найквиста.

Рис. 3. Логарифмическая амплитудно-частотная
характеристика
Из графика логарифмической характеристики (рис.
3) видно, что частота среза составляет 0.25 рад/с. Согласно теореме
Котельникова - Найквиста частота дискретизации должна быть больше удвоенного
значения частоты среза, тогда период дискретизации имеет значение

Большое время дискретизации ухудшает качество
регулирования и снижает устойчивость, а малое увеличивает загрузку процессора,
ограничивая его функциональные возможности по управлению. Поэтому надо выбрать
период дискретизации оптимальный в этом отношении. Принимаем Т = 1 с.
. Обоснование способа ввода информации
В данной системе наиболее оптимально
использовать прерывания от концевых датчиков и циклический опрос датчика
температуры и массы. Наибольший приоритет в любом микроконтроллере имеют
прерывания, а это обеспечит мгновенную реакцию на аварийные режимы работы.
Датчик температуры продукта будет опрашиваться циклически. Для этого будет
настроено прерывание от таймера-счётчика, инициирующее опрос. По истечении
времени произойдёт считывание информации с датчика, её обработка, выдача
управляемого воздействия, сброс таймера-счётчика и его повторная установка.
На объекте управления будет стоять датчик
температуры. После датчика температуры установим гальваническую развязку и
усилитель постоянного тока. В контроллере используем встроенный
аналого-цифровой преобразователь. Таким образом, в вычислительную машину будет
поступать цифровой код.
. Выбор технических средств
С помощью каталогов производителей, поставщиков
средств автоматизации и управления выбираем контроллер, модули ввода/вывода
аналоговых и дискретных сигналов, задатчики и датчики согласно требованиям,
предъявляемым к системам управления/регулирования.
Контроллеры компании Advantech
имеют модульную конструкцию с открытой и масштабируемой архитектурой,
обеспечивают лёгкость системной интеграции, мощные возможности модернизации и
удовлетворяют все потребности предприятия в рамках существующей инфраструктуры.
Представляет собой законченное устройство и относится к классу мини рабочих
станций.
Контроллер содержит:
16-разрядный микропроцессор
Флэш-ПЗУ: 512 кбайт
Статическое ОЗУ: 256 кбайт
Операционная система ROM-DOS
Количество модулей ввода/вывода: до 4
Последовательные порты: 1хRS-232,
1xRS-485, 1xRS-232
(прогр.)
Скорость обмена: до 115.2 кбит/с
Количество узлов сети на один порт RS-485:
до 256
Программная поддержка: библиотека функций на Turbo
C++ 3.0 для DOS,
UltraLogic.
Датчик температуры.
Датчики температуры Honeywell
представлены двумя сериями - датчики с полупроводниковым чувствительным
элементом (серия 700, являющаяся заменой снятой с производства серии HEL-700).
Измеряемая температура преобразуется в сопротивление со стабильной линейной
зависимостью. Датчики могут быть использованы как в газовых так и агрессивных
средах.
Выбираем датчик: 700-101ВАА-В00
Диапазон рабочих температур: -70 +500
Время отклика (вода/газ) - 0.05-0.15/3-10 с
Точность - ± 0.06 %
Рекомендуемый измерительный ток - 0.3…10 мА
Чувствительность - 3850 ррт/к
Корпус 2.1*2.3*0.9
Измеряемая среда: газ, мет. Поверхность
Модуль аналогового ввода ADAM-4011:
Подсистема аналогового ввода:
Эффективное разрешение АЦП: 16 разрядов
Тип входного сигнала: сигнал с термопары,
напряжение (мВ, В), ток (мА)
Диапазон входного сигнала : ±15, 50, 100, 500
мВ, ± 1, 2.5 В, 20 мА
Напряжение изоляции: 3000 В постоянного тока
Входное сопротивление: 2МОм
Полоса пропускания: 2.62 Гц
Основная погрешность измерения: ± 0.05 % при
измерении напряжения
Коэффициент ослабления помехи общего вида на
частоте 50/60 Гц: не менее 150 дБ
Коэффициент ослабления помехи нормального вида
на частоте 50/60 Гц: не менее 100 дБ
Требования по питанию:
Напряжения питания: от 10 до 30 В
Потребляемая мощность: 1.2 Вт
Модуль дискретного ввода/вывода ADAM-4050:
Подсистема дискретного ввода
Количество каналов: 7
Уровень логического 0: не более 1 В
- Уровень логической 1: от 3.5. до 30 В
Вытекающий ток: не более 0.5 А (при загрузочном
резисторе сопротивлением 10 кОм между входным и цепью питания +5 В)
Подсистема дискретного вывода
Количество каналов: 8
Тип выхода: открытый коллектор
Ток нагрузки: до 30 мА
Максимальная рассеиваемая мощность канала: 300
мВт
Встроенный сторожевой таймер
Требования по питанию:
Напряжение питания: от 10 до 30 В
Потребляемая мощность: 0.4 Вт
Модуль аналогового вывода ADAM-4021:
Эффективное разрешение ЦАП: 12 разрядов
Диапазон входного сигнала 0..10 В, 0..20 мА,
4..20 мА
Входное сопротивление: 0.5 Ом
Основная погрешность измерения: ± 0.1 %
Сопротивление нагрузки в режиме формирования
тока: от 0 до 500 Ом
Требования по питанию:
Напряжение питания: от 10 до 30 В
Потребляемая мощность: 1.4 Вт
. Учёт запаздывания и корректировка его влияния
Если в системе имеется запаздывание, величина
которого больше периода дискретизации Т, то это проводит к ухудшению
динамических свойствам замкнутой системы или её неустойчивости. Задача
устранения влияния запаздывания сводится к замене схемы системы, содержащей элемент
запаздывания внутри замкнутого контура (рис. 5а), схемой системы, в которой
элемент запаздывания находится вне этого контура (рис. 5б)

Рис. 4. Схема САУ с элементом запаздывания
Процесс регулирования в последней системе
(компенсированной) будет отличаться от процесса в исходной системе лишь
смещением на время запаздывания. Будем полагать что запаздывания τ
равно
целому числу, кратному Т, т.е. в относительных единицах времени m.
Передаточная функция замкнутой исходной системы
равна

А желаемая передаточная функция замкнутой
компенсированной системы должна быть равна

Сопоставляя эти передаточные функции видно, что
условие компенсации сводится к созданию такой структуры, при которой
передаточная функция разомкнутой системы W(z)∙z-m
заменяется передаточной функцией W(z).
Так, например, при параллельной коррекции
согласно условию устранения влияния запаздывания

Рис. 5. Схема САУ с элементом запаздывания и
корректирующим звеном

Откуда следует, что передаточная функция
корректирующего звено будет равна

Аналогично можно показать, что при
последовательной коррекции

Таким образом после получения передаточных
функций всех корректирующих звеньев, выполним моделирование с учётом реальных
параметров: наличие квантования, экстраполятора и без элемента, учитывающего
задержку, если будет получен неудовлетворительный результат, тогда изменим
параметры регулятора и введем в модель элемент запаздывания.
. Разработка алгоритма работы системы
При разработке алгоритма учтём процесс работы
системы, аварийные режиме работы, особенности вычисления и контроль датчиков.
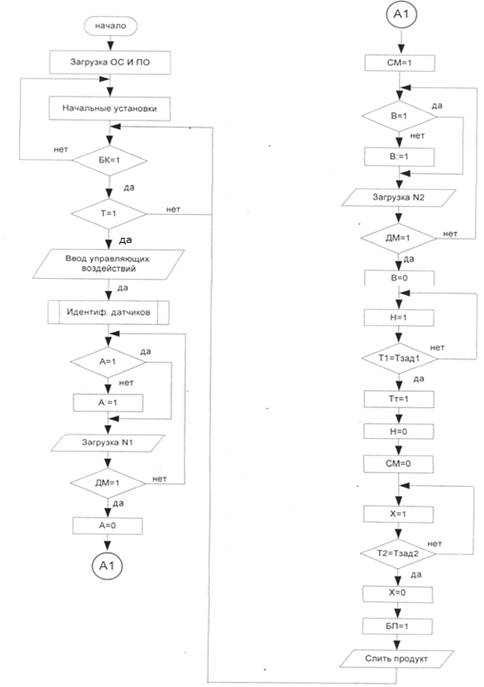
Рис. 6. Алгоритм управления объектом
. Аналитическое исследование
Получив дискретную передаточную функцию объекта
и регулятора, проведём аналитическое исследование.
Дискретная передаточная функции объекта
управления
Дискретная передаточная функция ПИД-регулятора

Определим дискретную передаточную функцию
замкнутой системы

Если на вход подать системы подать единичный
скачок  ,
получим изображение выходной величины системы
,
получим изображение выходной величины системы

Перейдя к оригиналу используя формулу
разложения, получим закон изменения выходной величины в дискретные моменты
времени

А(1),В(1) - значения числителя и знаменателя
передаточной функции замкнутой системы при z
= 1.
А(zi),В(zi)
- значения числителя и производной знаменателя передаточной функции замкнутой
системы при z=zi.
Подставив все известные и рассчитанные значения
получим на графике значение y[n]
для n=0,1,2…

Рисунок 7. График переходных процессов.
. Моделирование системы
Выполним моделирование системы
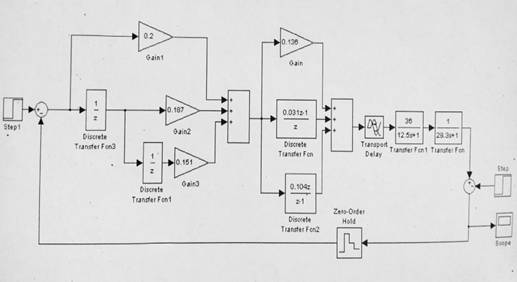
Рис. 8. Модель системы

Рис. 9. График переходных процессов при
отсутствии возмущения

Рис. 10. График переходных процессов при наличии
возмущения
Выводы
реактор дискретный аналоговый сигнал
Объектом для исследования в курсовой работе был
химический реактор. Для данной системы были составлены функциональная и
структурная схемы. В ходе выполнения работы была определена дискретная
передаточная функция, рассчитаны параметры цифрового регулятора, выбрано
оборудования системы с помощью программ MatLab
и MathCAD. В результате
проведённого моделирования были получены графики ОУ и АЦП при наличии и
отсутствии возмущения.
Литература
1. Теория
системы автоматического управления. В.А. Бессекерский, Е.П. Попов - 4-е
издание, перераб. и доп. - СПб, «Профессия», 2003.-752 с.
. Ципкин
Я.З. Теория линейных импульсных систем, ФизматГИЗ, М.:968с.
. Жуков
Н.С. Цифровые системы управления и обработки информации. Методическое пособие
для самостоятельного изучения.
. Теория
автоматического управления: Нелинейные системы управления при случайных
воздействиях/ Под ред. А.В. Нетушила. - М.: Высш. школа, 1983.
. Лукас
В.А. Теория автоматического управления. - М.: Недра, 1990. - 416 с.
. Брюханов
В.Н. и др. Теория автоматического управления. - М.: Высш. школа, 2000 г.
. Острём
К., Виттенмарк Б. Системы управления с ЭВМ: Пер. с англ. - М.: Мир, 1978. - 480
с., ил.
. Оппенгейм
Э., Шафер Р. Цифровая обработка сигналов/ Пер. с англ./ Под ред. С.Я. Шаца. -
М.: Связь, 1979. - 416 с.
. Антонью
А. Цифровые фильтры: анализ и проектирование/ Пер. с англ. - М.: Радио и связь,
1983. - 320 с.
. Гольденберг
Л.М., Матюшкин Б.Д., Поляк М.Н. Цифровая обработка сигналов: Справочник. - М.:
Радио и связь, 1985. - 312 с., ил.