Проектирование полупроводникового преобразователя электрической энергии
Министерство образования Республики
Беларусь
Белорусский национальный технический
университет
Кафедра: ЭАПУ и ТК
КУРСОВОЙ ПРОЕКТ
По дисциплине "Силовая
преобразовательная техника"
Проектирование полупроводникового
преобразователя электрической энергии
Выполнил: Долматов П.С.
студент гр. 107625
Руководитель: Улащик Н.М.
Минск 2007
Содержание
Введение
. Выбор силовых полупроводниковых приборов проектируемого
выпрямителя
.1 Расчет угла открывания тиристоров
.2 Расчет тока нагрузки для номинального режима работы
.3 Выбор силовых полупроводниковых приборов по току
.4 Проверка силовых полупроводниковых приборов по
перегрузочной способности
.5 Выбор класса силовых полупроводниковых приборов по
напряжению
. Расчет и выбор элементов пассивной защиты силовых приборов
от аварийных токов и перенапряжений и сглаживающего дросселя
.1 Выбор анодного реактора
.2 Расчет R-C цепочек
.3 Выбор сглаживающего дросселя
. Литературный обзор систем импульсно-фазового управления
.1 Горизонтальный метод управления
.2 Вертикальный метод управления
. Проектирование структурной и функциональной схем СИФУ
. Выбор типов линейных и цифровых интегральных микросхем
. Проектирование принципиальной схемы и электрический расчет
функциональных элементов системы управления преобразователем
.1 Проектирование и расчет источника синхронизирующего
напряжения (ИСН)
.2 Расчет устройства синхронизации.
.3 Расчет генератора развертываемого напряжения
.4 Расчет компаратора
.5 Расчет формирователя длительности импульсов
.6 Расчет распределителя импульсов
.7 Расчет выходного формирователя
. Составление полной принципиальной электрической схемы
преобразователя
.1 Составление полной принципиальной схемы преобразователя
.2 Описание принципа работы схемы проектируемой СИФУ
. Расчет и построение внешней, регулировочной характеристик
выпрямителя и регулировочной характеристики СИФУ
.1 Внешняя характеристика выпрямителя
.2 Регулировочная характеристика выпрямителя
.3 Регулировочная характеристика СИФУ
Заключение
Список использованных источников
Введение
В соответствии с заданием по курсовой работе мне необходимо
спроектировать полупроводниковый преобразователь электрической энергии.
Выпрямитель - это устройство, предназначенное для преобразования переменного
напряжения сети с постоянной амплитудой в постоянное напряжение, регулируемое
по величине. Основным блоком выпрямителей является вентильный блок,
преобразующий переменное напряжение в пульсирующее. При необходимости
преобразования или согласования выходного напряжения сети вентильный блок подключается
через трансформатор.
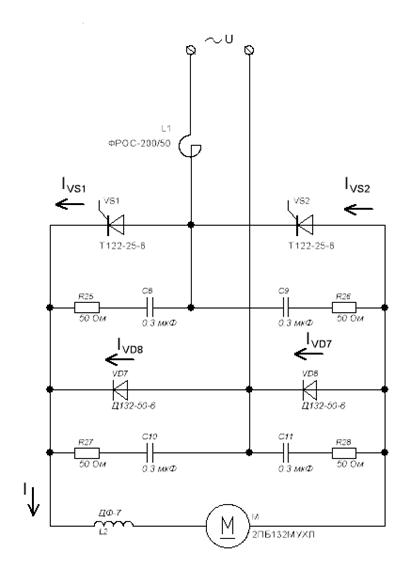
рис 1.1.Схема выпрямителя.
Для сглаживания пульсаций выходного напряжения выпрямителя к его выходу
подключается сглаживающий дроссель последовательно с нагрузкой. Управление
вентилями осуществляется системой импульсного фазового управления вентилями. В
соответствии с заданием необходимо спроектировать однофазный мостовой
несимметрично управляемый выпрямитель. Схема называется несимметричной, т. к.
отсутствует режим отдачи энергии в сеть.

рис 1.2. Временные диаграммы.
Схема выпрямления - однофазная мостовая несимметрично управляемая
представлена на рис.1.1. Временные диаграммы работы однофазного несимметричного
выпрямителя представлены на рисунке 1.2.
Основные расчетные соотношения для заданной схемы:
- среднее значение выпрямленной ЭДС

среднее
значение тока тиристоров:

действующее
значение тока тиристоров:
 ;
;
коэффициент
формы тока тиристоров:

среднее
значение тока диодов:
действующее
значение тока диодов:
коэффициент
формы тока диодов:

максимальное
обратное и прямое напряжение:

минимальный
угол открывания тиристоров:
требуемое
значении фазного напряжения во вторичной обмотке:

ЭДС
вторичной обмотки трансформатора:

типовая
мощность трансформатора:

-
полная мощность первичной и вторичной обмотки трансформатора:


 -
коэффициент схемы по мощности (
-
коэффициент схемы по мощности ( )
)
номинальные
значения токов в первичной и вторичной обмотках:

коэффициент
мощности потребления:
действующее
значение тока трансформатора:


1. Выбор
силовых полупроводниковых приборов проектируемого выпрямителя
Для двигателя указанного в задании к курсовому проектированию 2ПБ 132МУХЛ
4 с номинальными параметрами Pн=2,4 кВт, Uн=110 В из справочника [8] занесем основные характеристики в
таблицу 1.1.
Таблица 1.1. Основные характеристики ДПД 2ПБ 132МУХЛ 4.
|
Мощность, кВт
|
Номинальное напряжение, В
|
Частота вращения, об/мин
|
КПД, %
|
Сопротивление обмотки при
15° С, Ом
|
Индуктивность цепи якоря,
мГн
|
Момент инерции, кг·м 2
|
|
|
Номинальная
|
Максимальная
|
|
Якоря
|
Добавочных полюсов
|
Обмотки возбуждения
|
|
|
|
2.4
|
110
|
1600
|
4000
|
76.5
|
0.185
|
0.148
|
202/54.5
|
4.2
|
0.038
|
1.1 Расчет
угла открывания тиристоров
Рассчитаем
угол открывания  такой, чтобы обеспечить на нагрузке требуемое
напряжение питания
такой, чтобы обеспечить на нагрузке требуемое
напряжение питания  .
.
При
активно-индуктивной нагрузке:
 , где
, где  =
=
Найдем
минимальный угол открывания тиристоров:

Найдем
максимальный угол открывания тиристоров:

Т.а.
 больше
больше  , то в
цепи будут иметь место большие пульсации тока нагрузки и необходимо ставить
либо силовой трансформатор, для согласования номинального напряжения нагрузки с
выпрямленным, либо дроссель, для снижения пульсаций тока. Из-за большой
стоимости трансформатора установим дроссель.
, то в
цепи будут иметь место большие пульсации тока нагрузки и необходимо ставить
либо силовой трансформатор, для согласования номинального напряжения нагрузки с
выпрямленным, либо дроссель, для снижения пульсаций тока. Из-за большой
стоимости трансформатора установим дроссель.
.2 Расчет
тока нагрузки для номинального режима работы
выпрямитель перенапряжение генератор компаратор
Определим номинальный ток нагрузки электродвигателя:

где
 - номинальная мощность электродвигателя,
- номинальная мощность электродвигателя, 
 -
номинальное напряжение электродвигателя,
-
номинальное напряжение электродвигателя, 
 - КПД
двигателя, %,
- КПД
двигателя, %, 
Среднее
значение тока вентилей: ( )
)
= =
= =
= =
= =
= =
=
Действующее
значение тока вентилей:
=
 =
= =
= =
=
Среднее значение тока диодов:
IFAV=

Действующее
значение тока диодов:
=
Для
однофазной мостовой схемы выпрямления основные параметры при активно-индуктивной
нагрузке следующие:
Коэффициент
схемы

Коэффициент
формы тока для вентиля:
 =
=
Коэффициент
формы тока для диода:
где
- среднее значение выпрямленного напряжения;  - среднее значение тока нагрузки;
- среднее значение тока нагрузки;  - действующее питающего напряжения на входе
выпрямителя; ITRMS, IFRMS - действующие значения токов вентилей; ITAV,
IFAV -
средние значения токов вентилей.
- действующее питающего напряжения на входе
выпрямителя; ITRMS, IFRMS - действующие значения токов вентилей; ITAV,
IFAV -
средние значения токов вентилей.

.3 Выбор
силовых полупроводниковых приборов по току
Определяем параметры работы прибора отличающие от номинальных. В данном
случае от номинальных отличаются следующие параметры:
а)
Коэффициент формы тока для вентиля: 
Коэффициент
формы тока для диода: 
б)
Температура окружающей среды  ;
;
Выберем типы приборов исходя из условия.
 ,
,
 ,
,
где
 - коэффициент запаса, учитывающий отклонение режима
работы и условий охлаждения от номинальных,
- коэффициент запаса, учитывающий отклонение режима
работы и условий охлаждения от номинальных,  ;
;
 -
коэффициент запаса по току,
-
коэффициент запаса по току,  ,
принимаем
,
принимаем  .
.
Для
тиристора:
Принимаем
 т.к. у тиристора
т.к. у тиристора  ,
следовательно, увеличивается полная мощность потерь и температура перехода.
,
следовательно, увеличивается полная мощность потерь и температура перехода.
 ,
,
 ,
,
Для
полученного значения тока принимаем из справочника [1] тиристор типа Т 122-25,
с охладителем типа О 221-60, у которого, при естественном охлаждении,
допустимая нагрузка тиристора:  .
.
Для выбранного тиристора рассчитываем максимально допустимый средний ток
при заданных условиях работы. Расчет производим по формуле:
где
 - пороговое напряжение;
- пороговое напряжение;  - дифференциальное сопротивление в открытом
состоянии;
- дифференциальное сопротивление в открытом
состоянии;  - максимальная допустимая температура перехода; - температура окружающей среды;
- максимальная допустимая температура перехода; - температура окружающей среды;  - тепловое сопротивление переход-среда которое равно
- тепловое сопротивление переход-среда которое равно
 ,
,
где
 - тепловое сопротивление переход-корпус;
- тепловое сопротивление переход-корпус;  - тепловое сопротивление корпус-контактная поверхность
охладителя;
- тепловое сопротивление корпус-контактная поверхность
охладителя;  - тепловое сопротивление контактная поверхность
охладителя - охлаждающая среда.
- тепловое сопротивление контактная поверхность
охладителя - охлаждающая среда.
Получаем:

Максимально
допустимый средний ток при заданных условиях работы будет равен:

Проверим условие.
 ,
,
Подставив
значения, получим.
 ,
,

Так
как  , то выбранный тиристор по току подходит.
, то выбранный тиристор по току подходит.
Для диода:
Принимаем
 т.к. для диода улучшение режима работы по сравнению с
номинальным режимом.
т.к. для диода улучшение режима работы по сравнению с
номинальным режимом.


Для
полученного значения тока принимаем из справочника [1] диод типа Д 132-50 с
охладителем типа О 231-80, у которого, при естественном охлаждении, допустимая
нагрузка тиристора:  .
.
Для выбранного диода рассчитываем максимально допустимый средний ток при
заданных условиях работы. Расчет производим по формуле:
Для
данного диода из справочника [1] следующие данные(при естественном охлаждении
радиатора):




Подставим значения параметров диода:

Проверим условие:
 ,
,
Подставив
значения, получим
 ,
,

Так
как  , то выбранный диод по току подходит.
, то выбранный диод по току подходит.
.4
Проверка силовых полупроводниковых приборов по перегрузочной способности
Критерием нормальной работы силовых полупроводниковых приборов при
перегрузке по току является выполнение условия:
 ,
,
где
 - максимально допустимое время перегрузки, за которое
температура перехода достигает
- максимально допустимое время перегрузки, за которое
температура перехода достигает  ;
;
 -
требуемое (реальное) время перегрузки;
-
требуемое (реальное) время перегрузки;
Время
определяем по графику зависимости переходного
теплового сопротивления  переход - среда,
переход - среда,  . Для
полупроводниковых приборов с охладителем:
. Для
полупроводниковых приборов с охладителем:
 ,
,
где
 - средние потери мощности при перегрузке (для диода
- средние потери мощности при перегрузке (для диода  ), Вт;
), Вт;
 -
средние потери мощности до перегрузки (для диода
-
средние потери мощности до перегрузки (для диода  ), Вт;
), Вт;
 , (для
тиристора)
, (для
тиристора)
 , (для
диода)
, (для
диода)
 , (для
тиристора)
, (для
тиристора)
 , (для
диода)
, (для
диода)


где
 - коэффициент запаса по току рабочей перегрузки,
- коэффициент запаса по току рабочей перегрузки,  ;
;
Для
тиристора:


Тогда
 ,
,
Из
графика зависимости определяем для
тиристора, которое будет равно  .
.
Для
диода:


Тогда
 ,
,
Из
графика зависимости определяем для
диода, которое будет равно  .
.
Определим
реальное время перегрузки.
 ,
,
где
 - суммарный, приведенный момент инерции
электропривода,
- суммарный, приведенный момент инерции
электропривода,  ;
;
 -
пусковой момент,
-
пусковой момент,  ;
;
 -
статический момент;
-
статический момент;
 ,
,
где
 - номинальная мощность двигателя, Вт;
- номинальная мощность двигателя, Вт;
 -
угловая скорость двигателя, рад/с;
-
угловая скорость двигателя, рад/с;

Тогда
 ,
,
 ,
,
 ,
,
Условие
 выполняется, значит силовые ключи подходят по
перегрузочной способности.
выполняется, значит силовые ключи подходят по
перегрузочной способности.
1.5 Выбор
класса силовых полупроводниковых приборов по напряжению
В
качестве классификационного значения напряжения приводимого в справочнике
принимают повторяющееся импульсное напряжение в закрытом состоянии  .
.
-
указывается в справочных данных в обозначении прибора.
Для
выбора приборов проверим условие.
 ,
,
где
 - коэффициент запаса по рабочему напряжению,
- коэффициент запаса по рабочему напряжению,  ;
;
 -
максимальное значение рабочего напряжения прикладываемого к силовому прибору
схемы, В;
-
максимальное значение рабочего напряжения прикладываемого к силовому прибору
схемы, В;
 ,
,
где
 - коэффициент учитывающий возможность повышения напряжения
в сети,
- коэффициент учитывающий возможность повышения напряжения
в сети,  ;
;
 -
номинальное значение максимального обратного напряжения прикладываемого к
силовому прибору в схеме, В;
-
номинальное значение максимального обратного напряжения прикладываемого к
силовому прибору в схеме, В;
 ,
,
где
- напряжение сети, В;
Откуда
 ,
,
 ,
,
 ,
,
 ,
,
Таким
образом, для данных тиристоров и диодов Т 122-25 и Д 132-50  , т.е. нужны тиристоры и диоды 6 класса по напряжению
- Т 122-25-6 и Д 132-50-6.
, т.е. нужны тиристоры и диоды 6 класса по напряжению
- Т 122-25-6 и Д 132-50-6.
2. Расчет
и выбор элементов пассивной защиты силовых приборов от аварийных токов и
перенапряжений и сглаживающего дросселя
.1 Выбор
анодного реактора
Анодные реакторы используют для защиты СПП, т.к. ограничивают ток
короткого замыкания на уровне не превышающий ударный ток тиристора.
Требуемое значение индуктивности анодного реактора:

 -
количество реакторов ограниченных током короткого замыкания.
-
количество реакторов ограниченных током короткого замыкания.
 -
ударный ток который может протекать по прибору в течение 10 мкс
-
ударный ток который может протекать по прибору в течение 10 мкс
У
выбранного тиристора  , у диода -
, у диода -  ,
следовательно, в расчетах принимаем .
,
следовательно, в расчетах принимаем .
где
 коэффициент учитывающий наличие свободной
составляющей в токе короткого замыкания равный
коэффициент учитывающий наличие свободной
составляющей в токе короткого замыкания равный  . Примем равный 1.65
. Примем равный 1.65
Анодный реактор выбираем из соотношений:

Выбираем
анодный реактор ФРОС-200/50. Данный анодный реактор имеет следующий параметры;
номинальный
ток  ;
;
номинальную
индуктивность  ;
;
потери
мощности при 
Найдем активное сопротивление анодного реактора:
.2 Расчет
R-C цепочек
Защитные R-C цепочки предназначены для
ограничения скорости нарастания напряжения и снижения перенапряжений на
вентилях схемы. Для защиты СПП от аварийных токов используют анодные реакторы,
которые ограничивают ток короткого замыкания на уровне, не превышающем ударный
ток Iуд. прибора. R-C цепочки включаются, как показано на рисунке 3.2.
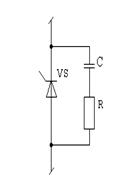
рис.
3.2. Включение R-C цепочек.
Определим
параметры RC-цепочек:
Для
конденсатора:  ;
;
С=0.3
мкФ
 -
максимальное значение обратного тока вентиля
-
максимальное значение обратного тока вентиля  -
для диода,
-
для диода,  - для тиристора.
- для тиристора.
Мощность
рассеиваемая на резисторе:
 - для
диода;
- для
диода;
 - для
тиристора;
- для
тиристора;
Где
- максимальное значение обратного тока вентиля - для диода, - для
тиристора.

R=50 Ом
Из
справочника выбираем нагрузочные резисторы МЛТ-2-49.9 Ом±5% и конденсаторы КТ 3-750-0.3 мкФ±5% для диода;
резисторы МЛТ-2-49.9 Ом±5% и конденсаторы КТ 3-750-0.3 мкФ±5% для тиристора.
.3 Выбор
сглаживающего дросселя
Дроссель ставится последовательно с якорем для снижения пульсаций тока и
ограничения зоны прерывистых токов главной цепи двигателя и также для снижения
нелинейности характеристик электропривода.
Определяем требуемую постоянную времени электрической цепи исходя из
условий ограничения зоны прерывистого тока
где
 - постоянный коэффициент схемы выпрямления,
- постоянный коэффициент схемы выпрямления, 
 -
максимальное значение относительного граничного тока зоны прерывистого тока,
определяется по формуле:
-
максимальное значение относительного граничного тока зоны прерывистого тока,
определяется по формуле:
 ,
,
где
 - абсолютное наибольшее значение граничного тока,
- абсолютное наибольшее значение граничного тока,
 ;
;

 - базовое
значение тока, определяется по формуле:
- базовое
значение тока, определяется по формуле:
 ,
,
где
 - максимальное значение анодного напряжения
- максимальное значение анодного напряжения
 -
активное сопротивление якорной цепи, определяется по формуле:
-
активное сопротивление якорной цепи, определяется по формуле:
 ,
,
где
 - сопротивление якоря двигателя:
- сопротивление якоря двигателя:

 -
активное сопротивление анодного реактора,
-
активное сопротивление анодного реактора,  ;
;
 -
активное сопротивление силового преобразователя, учитывающее падение напряжения
на вентилях и проводах, определяется по формуле:
-
активное сопротивление силового преобразователя, учитывающее падение напряжения
на вентилях и проводах, определяется по формуле:

где
n - число вентилей, последовательно включенных,
проводящих ток в один и тот же момент времени n=1;
 - прямое
падение напряжения на вентиле:
- прямое
падение напряжения на вентиле:  ;
;
 .
.
Тогда
активное сопротивление якорной цепи в РПТ
 .
.
И,
следовательно, базовое значение тока
 .
.
Определим
требуемую индуктивность якорной цепи, исходя из формулы.

Определим
требуемую индуктивность дросселя
 .
.
Индуктивность
якоря известна из справочника, =4.2мГн.
=4.2мГн.
Исходя
из того, что Iн=28.52 А и Lдр=10.8мГн, из справочника
выбираем дроссель ДФ-7, данные которого приведены ниже:


Потери
мощности при 
Масса
m=70 кг
Рассчитаем
активное сопротивление дросселя

Найдём
индуктивность якорной цепи

Активное сопротивление якорной цепи в режиме непрерывного тока рассчитаем
по формуле


где
 - коммутационное сопротивление, обусловленное углом
перекрытия анодов;- пульсность схемы, m=2;
- коммутационное сопротивление, обусловленное углом
перекрытия анодов;- пульсность схемы, m=2;
 -
индуктивное сопротивление анодного реактора,
-
индуктивное сопротивление анодного реактора, 
 Ом
Ом
 Ом
Ом
Найдём
активное сопротивление якорной цепи:
 .
.
 Ом
Ом
Проверим
дроссель по пульсациям переменной составляющей тока нагрузки. Переменная
составляющая тока нагрузки:
 < 0.2
< 0.2
где
 - удельная относительная величина дополнительных
потерь от переменной составляющей тока, которая определяется по графику f=s(
- удельная относительная величина дополнительных
потерь от переменной составляющей тока, которая определяется по графику f=s( ),
),
-
степень снижения нагрузки выпрямителя,

По графику определяем s=0.08;

Условие
соблюдается, значит, сглаживающий дроссель выбран правильно.
Определим
коэффициент пульсаций тока по формуле
 ,
,
где
 ,
,  -
соответственно максимальное и минимальное значения пульсирующего тока нагрузки.
-
соответственно максимальное и минимальное значения пульсирующего тока нагрузки.
Коэффициент
формы тока нагрузки

Коэффициент
использования двигателя по току
 .
.
3.
Литературный обзор систем импульсно-фазового управления
В зависимости от того, в одном или нескольких каналах вырабатываются
управляющие импульсы для каждого вентиля преобразователя, различают
одноканальные и многоканальные системы управления, а в зависимости от принципа
изменения фазы управляющего импульса - горизонтальные, вертикальные и цифровые
системы.
Кроме того системы могут быть синхронными и асинхронными. При синхронном
импульсно-фазовом управлении угол подачи управляющего импульса отсчитывается от
определенной фазы напряжения сети, питающей преобразователь.
При асинхронном импульсно-фазовом управлении угол подачи управляющего
импульса отсчитывается от момента подачи предыдущего импульса.
Система импульсно-фазового управления предназначена для выполнения 2
функций:
а) Определение моментов времени, в которые должны быть включены те или
иные вентили. Эти моменты задаются величиной характеристики управления, которые
подаются на вход СИФУ и выдают значения выходных параметров преобразователя.
б) Формирование открывающих импульсов, передаваемых в нужные моменты
времени на управляющие электроды тиристоров, имеющих достаточную амплитуду,
мощность и длительность. Для выполнения этих функций СИФУ должна содержать 2 основных
блока:
·
фазосдвигающее
устройство;
·
выходной
формирователь.
Требования, предъявляемые к СИФУ:
1) Длительность мощность открывающих
импульсов определяется в соответствии с параметрами тиристоров, а также
режимами работы преобразователя и эти импульсы должны быть достаточными для
надежного открывания силовых вентилей.
Диапазон
регулирования угла  определяется типом преобразователя, режимами работы
его, характером нагрузки и должны быть достаточными для регулирования выходного
напряжения в заданном диапазоне.
определяется типом преобразователя, режимами работы
его, характером нагрузки и должны быть достаточными для регулирования выходного
напряжения в заданном диапазоне.
.1
Горизонтальный метод управления
При горизонтальном управлении управляющий импульс формируется в момент
перехода синусоидального напряжения через нуль, а изменение его фазы
обеспечивается изменением фазы синусоидального напряжения, то есть смещение
этого напряжения по горизонтали.
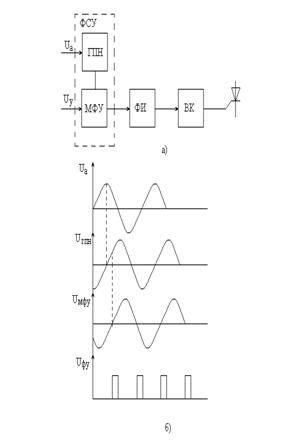
Рис.
4.1. Горизонтальный метод управления: а) функциональная схема; б) диаграммы
работы;
На рис. 4.1 приведена структурная схема одного канала многоканальной
системы управления, использующей горизонтальное управление.
Принцип работы системы заключается в следующем. Генератор переменного
напряжения ГПН вырабатывает синусоидальное напряжение, находящееся в
определенном фазовом соотношении с анодным напряжением тиристора данного
канала. С выхода мостового фазовращающего устройства МФУ сдвинутое по фазе
напряжение поступает на формирователь импульсов ФИ, где в момент перехода
синусоиды через нуль формируется управляющий импульс, который затем усиливается
выходным каскадом ВК. Угол сдвига фаз регулируется изменением напряжения
управления.
.2
Вертикальный метод управления
При вертикальном управлении управляющий импульс формируется в результате
сравнения на нелинейном элементе величин переменного (синусоидального,
пилообразного треугольного) и постоянного напряжения. В качестве нелинейного
элемента обычно применяют транзистор.
Таким образом фазосдвигающее устройство при вертикальном управлении
состоит из генератора переменного напряжения и узла сравнения (рис. 4.2).
Система работает следующим образом. Генератор переменного напряжения ГПН
запускается при поступлении с синхронизатора напряжения в момент появления на
тиристорах прямого напряжения, то есть в точках естественной коммутации. С
выхода ГПН напряжение пилообразной формы поступает на устройство сравнения, где
оно сравнивается с напряжением управления UУ. В момент сравнения пилообразного и управляющего напряжений
устройство сравнения вырабатывает импульс, который через распределитель
импульсов РИ поступает на формирователь импульсов ФИ 1 или ФИ 2 и дальше, через
выходные каскады ВК 1, ВК 2 - на тиристоры выпрямителя.

Рис.
4.2. Вертикальный метод управления: а) функциональная схема; б) диаграмма
работы
Благодаря
общему ФСУ одноканальные системы управления обладают высокой симметрией
управляющих импульсов. Кроме того, одноканальная система проста в настройке,
поскольку не требуется создание нескольких идентичных каналов. К недостаткам
одноканальных синхронных систем управления следует отнести сложность
синхронизации с сетью, так как необходимо формировать одноканальную последовательность
кратной частоты.
4.
Проектирование структурной и функциональной схем СИФУ
Структурная схема СИФУ однофазным мостовым нессиметрично управляемым
выпрямителем показана на рис. 5.1.

рис 5.1. Структурная схема СИФУ.
УС- устройство синхронизации; обеспечивает гальваническую развязку СУ с
питающей сетью, отмечает переходы через ноль сетевого напряжения (выдает
короткие импульсы синхронизации Uсинх. в эти моменты времени), а
также формирует на своем выходе разрешающие сигналы Uр1 и Uр2 (соответствуют
положительным и отрицательным полупериодам сетевого напряжения), которые
используются для разделения импульсов управления тиристорами VS1 и VS2;
ГРН - генератор развертываемого напряжения; формирует пилообразное
напряжение Uп (или иное) напряжение, возвращаясь в исходное
состояние в момент подачи импульсов Uсинх.;
НО- нуль-орган; сравнивает пилообразное Uп и напряжение
управления Uу (формируется системой автоматического управления) и в
момент их равенства меняет свое выходное состояние;
ФДИ- формирователь длительности импульсов; по "рабочему" фронту
сигнала Uно формирует прямоугольные импульсы с длительностью,
достаточной для надежного открывания тиристоров силового блока СБ;
РИ- распределитель импульсов; управляется сигналами Uр1 и
Uр2 с выхода УС и служит для распределения импульсов UGT по
тиристорам VS1 и VS2 (формирует на выходе соответственно импульсы UGT1 и
UGT2);
ВФ1, ВФ2- выходные формирователи; формируют
открывающие импульсы по мощности, необходимой для надежного включения
тиристоров, и обеспечивают потенциальную развязку СУ с силовым блоком СБ.
Функциональная схема СИФУ, разработанная на основе структурной схемы,
показана на рис.5.2, а временные диаграммы ее работы на рис.5.3.
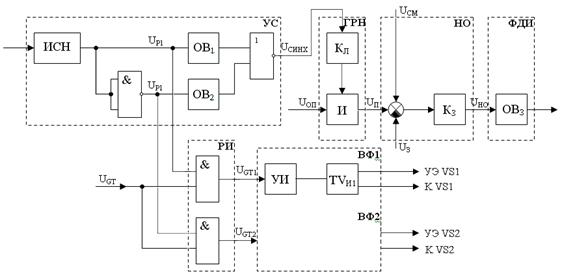
рис 5.2 Функциональная схема СИФУ
рис 5.3. диаграммы работы СИФУ.
Источник синхронизирующего напряжения (ИСН) может быть выполнен с
использованием трансформатора либо оптоэлектронной развязки. На выходе ИСН
формируется импульс Uр 1,с помощью логического элемента
"2И-НЕ" формируется импульс Uр 2,
соответствующие положительным и отрицательным полупериодам питающего
напряжения. Эти сигналы используются в дальнейшем в РИ для разделения импульсов
управления по тиристорам VS1 и VS2.Одновибраторы ОВ1 и ОВ2
по фронту "0"/"1" сигналов Uр1 и Uр2
формируют на своих
выходах короткие (до 50 мкс) импульсы, которые суммируются на элементе
"2ИЛИ-НЕ".Выходной сигнал УС Uсинх. представляет длительный импульса, с "провалами",
строго синхронизированных с сетевым напряжением и соответствующих точкам
естественного открывания тиристоров VS1 иVS2. ГРН представляет собой интегратор
И со сбросом. При наличии импульса Uсинх. ключ Кл
закрыт, и напряжение на выходе интегратора Uп нарастает по линейному закону. При отсутствии импульса Uсинх. ключ Кл открывается и
интегратор сбрасывается в ноль. Пилообразное напряжение Uп подается на вход НО, где происходит
сравнение трех сигналов: напряжения управления (Uу), напряжения смещения (Uсм) и напряжения ГРН (Uп). Uу формируется САУ электроприводом. Uсм определяет максимальный угол
открывания, т.е. минимальное напряжение на якоре двигателя. В момент равенства
сигналов Uп и Uсм -Uу компаратор К 3 меняет свое выходное
состояние. По фронту сигнала Uн
0 одновибратор ОВ 3
формирует импульсы открывания тиристоров по длительности (до четырех эл.
градусов), т.е. управление тиристорами осуществляется "узкими"
импульсами (чтобы не насыщался импульсный трансформатор TVи).При управлении тиристорами СБ
"широкими" импульсами, для исключения насыщения TVи открывающие импульсы UGT1 и UGT2 заполняют сигналом высокой частоты
(до 10 кГц) с помощью ГВЧ (генератора высокочастотного заполнения).
РИ, выполненный на элементах "2И", осуществляет разделение
импульсов UGT, соответствующих требуемому углу a, на импульсы UGT1 и UGT2 для управления соответственно
тиристорами VS1 и VS2.Эти маломощные импульсы подаются на усилители импульсов
(УИ) и через импульсные трансформаторы TVи 1 и TVи 2 на управляющие электроды
соответствующих тиристоров VS1 и VS2.
5. Выбор
типов линейных и цифровых интегральных микросхем
В ходе проектирования системы управления будут использованы следующие
элементы:
Оптопара: АОТ 126А, ее параметры предоставлены в таблице 6.1.
Таблица 6.1 Основноые электрические параметры оптопары АОТ 126А
|
Наименование параметра
(режим измерения), единица измерения
|
Буквенное обозначение
|
Значение параметра
|
|
Входное напряжение (Iвх=
20мА), В
|
Uвх
|
Не более 2
|
|
Выходное остаточное
напряжение (Iвх= 20мА, Iвых = 10мА), В
|
Uост
|
Не более 0.3
|
|
Ток утечки на выходе (Iвх=
0мА,Uком = 30В), мкА (Iвх= 0мА,Uком = 15В), мкА
|
Iут.вых Iут.вых
|
Не более 10
|
|
Сопротивление изоляции (Uиз
= 500В), Ом
|
Rиз
|
Не менее 
|
Примечание: измерение параметров, указанных в таблице, кроме Rиз,
производится при внешнем резисторе R = 100 кОм между выводами 3, 5 оптопары.
Электрическая принципиальная схема оптопары АОТ 126А представлена на рис.
6.1.
Рис 6.1 Схема электрическая принципиальная.
К выводам 1 и 2 подводится входное напряжение, 3 - вывод базы, 4 -
эммитера, 5 - коллектора транзистора.
Далее будут описаны выбранные ИМС, и в начале приведены термины,
определения и буквенные обозначения электрических параметров ИМС установленных
согласно ГОСТ 19480-74 и ГОСТ 17021-88:
Таблица 6.2. термины, определения и буквенные обозначения электрических
параметров ИМС
|
Термин
|
Обозначение
|
|
Напряжение питания
|

|
|
Входное напряжение низкого
уровня
|

|
|
Входное напряжение высокого
уровня
|

|
|
Выходное напряжение низкого
уровня
|

|
|
Выходное напряжение
высокого уровня
|

|
|
Прямое падение напряжение
на антизвонном диоде
|

|
|
Ток потребления
|

|
|
Входной ток
|

|
|
Входной ток низкого уровня
|

|
|
Входной ток высокого уровня
|

|
|
Выходное ток
|

|
|
Выходное ток низкого уровня
|

|
|
Выходной ток высокого
уровня
|

|
|
Время задержки
распространения при включении
|

|
|
Время задержки
распространения при выключении
|

|
|
Время задержки
распространения сигнала пи переходе сигнала из состояния
"ВЫКЛЮЧЕНО" в состояние низкого уровня
|

|
|
Время задержки
распространения сигнала пи переходе сигнала из состояния
"ВЫКЛЮЧЕНО" в состояние высокого уровня
|

|
|
Время задержки
распространения сигнала пи переходе сигнала из состояния высокого уровня в
состояние "ВЫКЛЮЧЕНО"
|

|
|
Время задержки
распространения сигнала пи переходе сигнала из состояния низеого уровня в
состояние "ВЫКЛЮЧЕНО"
|

|
|
Время перехода при включении
(фронт)
|

|
|
Время перехода при
выключении (спад)
|

|
Для реализации УС и ФДИ возьмем в качестве одновибратора ИМС КР 1533АГ 3.
Микросхема КР 1533АГ 3 представляет собой два ждущих одновибратора с
возможностью перезапуска. Каждый одновибратор имеет прямой Q и инверсный Q выходы, вход сброса К (активный уровень напряжения - низкий)
и два входа запуска: D1 -
прямой с активным высоким уровнем и D1 - инверсный с активным низким уровнем напряжения. Длительность
выходного импульса определяется внешними времязадающим элементами R и С.
Расположение выводов КР 1533АГ 3 показано на рис. 6.2. Назначение выводов
в таблице 6.3.
Рис. 6.2. Расположение выводов КР 1533АГ 3.
Таблица 6.3. Назначение выводов КР 1533АГ 3
|
01
|
 Вход информационный Вход информационный
|
|
|
02
|
D1
|
Вход информационный
|
|
03
|
 Вход установки в состояние "логический 0" Вход установки в состояние "логический 0"
|
|
|
04
|
 Выход информационный Выход информационный
|
|
|
05
|
Q2
|
Выход информационный
|
|
06
|
C2
|
Вывод для подключения
емкости
|
|
07
|
R2/C2
|
Вывод для подключения
резистора и емкости
|
|
08
|
OV
|
Общий вывод
|
|
09
|
 Вход информационный Вход информационный
|
|
|
10
|
D2
|
Вход информационный
|
|
11
|
 Вход установки в "логический 0" Вход установки в "логический 0"
|
|
|
12
|
 Выход информационный Выход информационный
|
|
|
13
|
Q1
|
Выход информационный
|
|
14
|
C1
|
Вывод для подключения
емкости
|
|
15
|
R1/C1
|
Вывод для подключения
резистора и емкости.
|
|
16
|
Ucc
|
Вывод питания от источника
напряжения.
|
Статические параметры КР 1533АГ 3 представлены в талице 6.4.
Таблица 6.4. Статически параметры ИМС КР 1533АГ 3.
|
Обозначение
|
Наименование параметра
|
Норма
|
Единица измерения
|
Режим измерения
|
|
|
Не менее
|
Не более
|
|
|
|
Выходное напряжение высокого уровня В В
|
|
|
|
|
|
Выходное напряжение низкого уровня0.4
.5В
|
В
|
|
|
|
|
|
Входной ток высокого уровня:
Для выводов 03, 11
Для одиночного входа.40
мкА
|
мкА
|
|
|
|
|
|
Входной ток низкого уровня:
Для выводов 01, 02, 09, 10
Для выводов 03, 11
 мА
мА
В РИ используется ИМС К 155ЛИ 501. Микросхема представляет собой два
логических элемента 2И.
Расположение выводов К 155ЛИ 501 показано на рис. 6.3.
рис. 6.3. Расположение выводов ИМС К 155ЛИ 501.
Условное графическое обозначение К 155ЛИ 501 приведено на рис. 6.4.
Рис 6.4. Условно графическое обозначение ИМС К 155ЛИ 501.
,2,6,7 - входы;
,5 - выходы;
- напряжение питания;
- общий.
Электрические параметры К 155ЛИ 501 представлены в таблице 6.5.
Таблица 6.5. Электрические параметры ИМС К 155ЛИ 501
|
Номинальное напряжение
питания
|
5В±5%
|
|
Выходное напряжение низкого
уровня При Ic=100 мA При Ic=300 мA
|
Не более 0.5 В Не более
0.7 В
|
|
Выходной ток низкого уровня
|
Не более -1.6 мA
|
|
Выходной ток высокого
уровня
|
Не более 0.04 мA
|
|
Входной пробивной ток
|
Не более 1 мA
|
|
Ток потребления при низком
уровне входного сигнала
|
Не более 65 мA
|
|
Ток потребления при высоком
уровне входного сигнала
|
Не более 11 мA
|
|
Потребляемая статическая
мощность
|
Не более 200мВт
|
|
Время задержки
распространения при включении
|
Не более 25 нс
|
|
Время задержки
распространения при выключении
|
Не более 25 нс
|
В УС используется ИМС К 155ЛА 18. Микросхема представляет собой два
логических элемента 2И-НЕ.
Расположение выводов К 155ЛА 18 показано на рис. 6.5
рис. 6.5. Расположение выводов К 155ЛА 18.
Условное графическое обозначение К 155ЛА 1 приведено на рис. 6.6.
Рис 6.6. Условное графическое обозначение ИМС К 155ЛА 1
,2,6,7 - входы;
,5 - выходы;
- напряжение питания;
- общий.
Электрические параметры ИМС К 155ЛА 18 представлены в таблице 6.6.
Таблица 6.6. Электрические параметры ИМС К 155ЛА 18
|
Номинальное напряжение
питания
|
5 В± 5 %
|
|
Выходное напряжение низкого
уровня
|
не более 0,4 В
|
|
Выходное напряжение
высокого уровня
|
не менее 2,4 В
|
|
Входной ток низкого уровня
|
не более -1,6 мА
|
|
Входной ток высокого уровня
|
не более 0,04 мА
|
|
Входной пробивной ток
|
не более 1 мА
|
|
Ток потребления при низком
уровне выходного напряжения
|
не более 71 мА
|
|
Ток потребления при высоком
уровне выходного напряжения
|
не более 14 мА
|
|
Потребляемая статическая
мощность
|
не более 223 мВт
|
|
Время задержки
распространения при включении
|
не более 35 нс
|
|
Время задержки
распространения при выключении
|
не более 35 нс
|
В УС используется ИМС КМ 155ЛЕ 5. Микросхема представляет собой четыре
логических элемента 2ИЛИ-НЕ.
Расположение выводов ИМС КМ 155ЛЕ 5 показано на рис. 6.7
рис. 6.7. Расположение выводов КМ 155ЛЕ 5
Условное графическое обозначение КМ 155ЛЕ 5 предоставлено на рис 6.8.
Рис 6.8. Условное графическое обозначение КМ 155ЛЕ 5
,4,10,13 - выходы;
,3,5,6,8,9,11,12 - входы;
- общий;
- напряжение питания;
Электрические параметры К 155ЛЕ 5 представлены в таблице 6.7.
Таблица 6.7. Электрические параметры ИМС К 155ЛЕ 5
|
Номинальное напряжение
питания
|
5 В± 5 %
|
|
Выходное напряжение низкого
уровня
|
не более 0,4 В
|
|
Выходное напряжение
высокого уровня
|
не менее 2,4 В
|
|
Входной ток низкого уровня
|
не более -1,6 мА
|
|
Входной ток высокого уровня
|
не более 0,04 мА
|
|
Входной пробивной ток
|
не более 1 мА
|
|
Ток потребления при низком
уровне выходного напряжения
|
не более 57 мА
|
|
Ток потребления при высоком
уровне выходного напряжения
|
не более 21 мА
|
|
Потребляемая мощность
|
не более 51,2 мВт
|
|
Время задержки
распространения при включении
|
не более 12 нс
|
|
Время задержки
распространения при выключении
|
не более 9 нс
|
В НО и ГРН используем операционный усилитель К 140УД 7.
Электрические параметры К 140УД 7 представлены в таблице 6.8.
Таблица 6.8. Электрические параметры ИМС К 140УД 7.
|
Номинальное напряжение
питания
|
2 * 15 В
|
|
Потребляемый ток
|
2,8 мА
|
|
Коэффициент усиления
напряжения
|
50000
|
|
Напряжение смещения нуля
|
9
|
|
Температурный коэффициент
напряжения смещения нуля
|
10 мкВ/ °С
|
|
Входной ток
|
200 нА
|
|
Разностный входной ток
|
50 нА
|
|
Коэффициент ослабления
синфазного сигнала
|
70 дБ
|
|
Частота единичного усиления
|
0,8 МГц
|
|
Скорость нарастания
выходного напряжения
|
0,3 В/мкс
|
|
Наибольшая амплитуда
выходного
|
10,5 В
|
|
Входное сопротивление
|
0,4 МОм
|
|
Коэффициент влияния
нестабильности напряжения источника питания
|
150 мкВ/В
|
Предельные эксплуатационные данные ИМС К 140УД 7 представлены в таблице
6.9.
Таблица 6.9. Предельные эксплуатационные данные ИМС К 140УД 7
|
Интервал значений напряжения
питания
|
2*(5...16,5) В
|
|
Допустимое значение
дифференциального входного напряжения
|
20 В
|
|
Допустимое значение
синфазного входного напряжения
|
12 В
|
|
Минимальное сопротивление
нагрузки
|
2 кОм
|
|
Максимальная емкость
нагрузки
|
1000 пФ
|
|
Максимальная рассеиваемая
мощность
|
125 мВт
|
Расположение выводов К 140УД 7 показано на рисунке 6.9.
Рис. 6.9. Расположение выводов К 140УД 7
Условное графическое обозначение К 140УД 7 показано на рисунке 6.10.
Рис. 6.10. Условное графическое обозначение К 140УД 7.
Назначение выводов К 140УД 7:
,5 - балансировка;
- вход инвертирующий;
- вход неинвертирующий;
- напряжение питания -Uп;
- выход;
- напряжение питания +Uп;
- коррекция;
Данные ИМС хороши тем, что у всех, кроме К 140УД 7, напряжение питания
составляет 5 В.
6. Проектирование
принципиальной схемы и электрический расчет функциональных элементов системы
управления преобразователем
.1
Проектирование и расчет источника синхронизирующего напряжения (ИСН)
ИСН выполнен на оптопаре, рис 7.1.
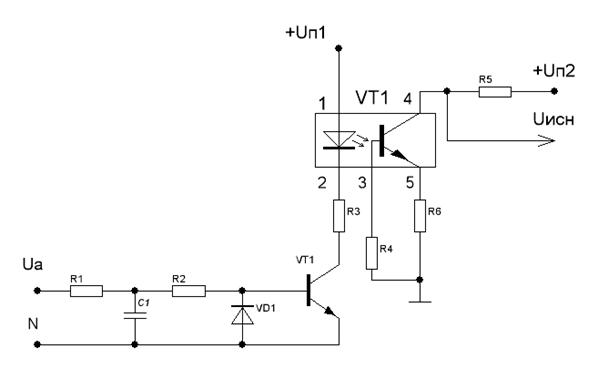
рис. 7.1 Источник синхронизирующего напряжения.
Входной фильтр на R1-C1 обеспечивает устранение
высокочастотных искажений в напряжении сети; кроме того, он сдвигает напряжение
для создания необходимого диапазона регулирования фазы импульсов управления.
Необходимый угол сдвига можно найти из выражения:

Тогда
В
качестве опторазвязки выбираем оптопару АОТ 126А со следующими параметрами:  ,
, ,
,  .
.
Тогда
В
качестве VT1 выбираем транзистор 2N2934: 



 ;
;
 ;
;
 ;
;







Мощности резисторов будут равны:
Принимаем
к установке следующие резисторы:
R1: С
5-37В-5-2кОм±5%;
R2: СП
3-44Б-0.5-680кОм±10%;
R3: СП
3-44Б-0.5-1.5кОм±10%;
R4: СП
3-44Б-0.5-100кОм±10%;
R5: СП
3-445Б-0.5-2.2кОм±10%;
R6: СП
3-445Б-0.5-1кОм±10%;
Выберем
диод VD1, 
Берем
диод 1N4306: 
Конденсатор:
С
1: БГТ-400-1 мкФ±10%;
6.2 Расчет
устройства синхронизации.
рис. 7.2. Устройство синхронизации.
Зададимся
длительностью выходного импульса  .
.
Из
формулы

найдем
значения . Примем
. Примем  , тогда
, тогда
Учитывая,
что токи в ИМС незначительные возьмем следующие резисторы:
R7:
МЛТ-0.125-18.2 кОм±10%;
R8:
МЛТ-0.125-18.2 кОм±10%;
Конденсаторы:
С
2: КЛС-1-35В-10 пФ±10%
С
3: КЛС-1-35В-10 пФ±10%
6.3 Расчет
генератора развертываемого напряжения
Схема генератора развертываемого напряжения представлена на рис.7.3.
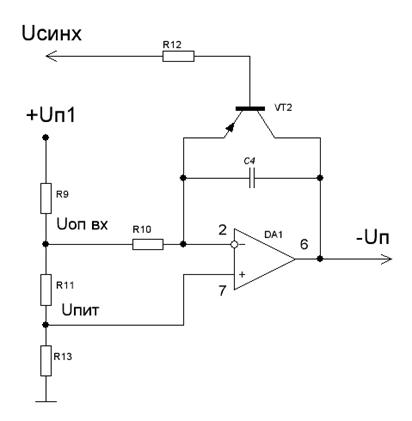
рис 7.3. Схема генератора развертываемого напряжения
Для расчетов воспользуемся схемой замещения, представленной на рис.7.3.1.
Исходные данные для расчета:
 ;
;
 ;
;
 ;
;
 ;
;
 .
.

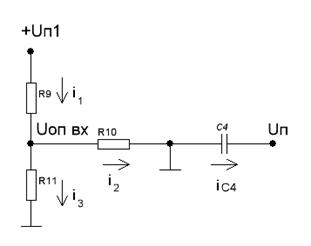
рис. 7.3.1. Схема замещения.
Так
как при  то
то

Примем
С 4=0.1 мкФ. Тогда: 


Примем
 . Тогда
. Тогда  :
:


Рассчитаем мощности резисторов:


Таким
образом, окончательно выбираем:
С
4: К 73-17-250В-0.1 мкФ±10%;
R9…R10:
МЛТ-0.125-49.9 кОм±10%;
Транзистор
VT2 выбираем по условиям:

Ток
коллектора равен току разряда конденсатора С 4:

С
учетом  имеем:
имеем:
Из
справочника выбираем транзистор 2Т 214В-1 со следующими параметрами:

Ток
базы транзистора равен
Тогда


Выбираем
R12: МЛТ-0.125-6.04 кОм±10%;
Т.к.
пила отрицательная и используется p-n-p
транзистор, то необходимо подать на операционный усилитель Uпит=2
В через делитель напряжения. Представим R11 суммой
сопротивлений R11=30 кОм и R13=20 кОм.


Берем:
R11:
МЛТ-0.125-30.1 кОм±10%;
R13:
МЛТ-0.125-20 кОм±10%;
.4 Расчет
компаратора
Компаратор осуществляет преобразование Uу в фазовый сдвиг - угол открывания a. Схема компаратора представлена на
рис.7.4.
рис. 7.4. Электрическая схема компаратора.
Развертываемое напряжение:

Для
момента времени, при котором произошло равенство напряжений, для входной цепи
компаратора можно записать:
Принимаем
 , тогда
, тогда
 .
.
При
 угол открывания
угол открывания  , а
, а  :
:
 .
.
В
режиме непрерывного тока

Учитывая,
что в момент равенства напряжений  , можно
записать:
, можно
записать:
 ,
,
 ,
,
 .
.
Для
 .
.
Отсюда
найдем:
С
помощью диода VD2 уберем отрицательное напряжение. Берем диод Д 25.

Напряжение
на выходе компаратора 10 В, следовательно 

Выбираем резисторы R14… R16: МЛТ - 0.125 - 20кОм±10%.
R17:
МЛТ - 0.125 - 2 кОм±10%.
VD2: Д
25
.5 Расчет
формирователя длительности импульсов
ФДИ реализован на одновибраторе КР 1533АГ 3. Принципиальная электрическая
схема одновибратора предоставлена на рисунке 7.5.
рис. 7.5. Принципиальная электрическая схема одновибратора.
Зададимся
длительностью выходного импульса .
Из
формулы
найдем
значения  . Примем
. Примем  , тогда
, тогда

R17:
МЛТ-0.125-18.2 кОм±10%;
C5: КЛС-1-35В-10
пФ±10%
6.6 Расчет
распределителя импульсов
РИ реализован на ИМС К 155ЛИ 501. Микросхема представляет собой два
логических элемента 2И. Принципиальная схема РИ предоставлена на рисунке 7.6.
рис. 7.6. Принципиальная схема РИ.
.7 Расчет
выходного формирователя
Выходной формирователь помимо усиления по мощности импульсов управления
осуществляют также потенциальную развязку силовой части преобразователя от
системы управления. Схема выходного формирователя представлена на рис. 7.7.
рис. 7.7. Электрическая схема выходных устройств.
Из справочника для тиристора Т 122-25 выписываем следующие параметры:

Определяем
 при снижении на 15% напряжения питания:
при снижении на 15% напряжения питания:

Минимальное
значение тока

Определяем
номинальные значения:


Номинальное значение внутреннего сопротивления источника:
Максимальное
значение  с учетом возможного повышения напряжения на 10% и
уменьшения внутреннего сопротивления источника на 5%:
с учетом возможного повышения напряжения на 10% и
уменьшения внутреннего сопротивления источника на 5%:
Выбираем
импульсный трансформатор ТИ 80 и транзистор 2N5189 со
следующими данными:
сопротивление
обмоток: 

Находим
номинальное напряжение источника питания:


Максимальная
мощность в управляющем переходе на максимальной ВАХ (максимум мощности имеет
место при  )
)
Из
справочника  , условие
, условие  выполняется.
выполняется.
По
данным расчетов выберем VD3:  ,
установим КД 248К,
,
установим КД 248К,
VD4: 2Д 106А
R21: C5-40В-01-10-33
Ом±10%;
R20: C5-40В-01-10-10
Ом±10%;

R19: МЛТ-2-301
Ом±10%;
C6: К
10У-5-25-0,1мкФ±5%;
7.
Составление полной принципиальной электрической схемы преобразователя
7.1
Составление полной принципиальной схемы преобразователя
Полная принципиальная схема (приложение 1) собрана из блоков, которые
были описаны в предыдущем разделе.
П
еречень элементов используемых в принципиальной схеме преобразователя
|
Обозначение элемента
|
Наименование
|
Количество,
шт.
|
|
Микросхемы
|
|
|
DD1
|
К 155ЛА 18
|
1
|
|
DD2,DD4
|
КР 1533АГ 3
|
1
|
|
DD3
|
КМ 155ЛЕ 5
|
1
|
|
DD5
|
К 155ЛИ 501
|
1
|
|
DA1..DA2
|
К 140УД 7
|
2
|
|
Оптопары
|
|
|
VT0
|
АОТ 126А
|
1
|
|
Транзисторы
|
|
|
VT1
|
2N2934
|
1
|
|
VT2
|
2Т 214В-1
|
1
|
|
VT3..VT4
|
2N5189
|
1
|
|
Диоды
|
|
|
VD1
|
1N4306
|
1
|
|
VD2
|
Д 25
|
1
|
|
VD3,VD5
|
КД 248К
|
1
|
|
VD4,VD6
|
2Д 106А
|
2
|
|
VD7..VD8
|
Д 132-50-6
|
2
|
|
Трансформаторы
|
|
|
VT1
|
ТИ 80-40-400
|
1
|
|
Тиристоры
|
|
|
VS1..VS2
|
Т 122-25-6
|
2
|
|
Анодные реакторы
|
|
|
L1
|
ФРОС-200/50
|
1
|
|
Дроссели
|
|
|
L2
|
ДФ-7
|
1
|
|
с
|
Резисторы
|
|
|
R1
|
С 5-37В-5-2 кОм±5%
|
1
|
|
R2
|
СП 3-44Б-0.5-680 кОм±10%
|
1
|
|
R3
|
СП 3-44Б-0.5-1.5 кОм±10%
|
1
|
|
R4
|
СП 3-44Б-0.5-100 кОм±10%
|
1
|
|
R5
|
СП 3-445Б-0.5-2.2 кОм±10%
|
1
|
|
R6
|
СП 3-445Б-0.5-1 кОм±10%
|
1
|
|
R7..R8, R18
|
МЛТ-0.125-18.2 кОм±10%
|
3
|
|
R9..R10
|
МЛТ-0.125-49.9 кОм±10%
|
2
|
|
R11
|
МЛТ-0.125-30.1 кОм±10%
|
1
|
|
R12
|
МЛТ-0.125-6.04 кОм±10%
|
1
|
|
R13..R16
|
МЛТ-0.125-20 кОм±10%
|
4
|
|
R17
|
МЛТ-0.125-2 кОм±10%
|
1
|
|
R19,R22
|
МЛТ-2-301 Ом±10%
|
2
|
|
R20,R23
|
C5-40В-01-10-10 Ом±10%
|
2
|
|
R21,R24
|
C5-40В-01-10-33 Ом±10%
|
2
|
|
R25..R28
|
МЛТ-2-49.9 Ом±5%
|
4
|
|
Конденсаторы
|
|
|
С 1
|
БГТ-400-1 мкФ±10%
|
1
|
|
С 2..С 3, С 5
|
КЛС-1-35-10 пФ±10%
|
3
|
|
С 4
|
К 73-17-50-0.1 мкФ±10%
|
1
|
|
С 6..С 7
|
К 10У-5-25-0.1 мкФ±5%
|
2
|
|
C8..C11
|
КТ 3-750-0.3 мкФ±5%
|
4
|
|
|
|
|
рис. 8.3. Временные диаграммы работы СИФУ.
7.2 Описание принципа работы схемы
проектируемой СИФУ
На блок синхронизации через ИСН выполненный на оптопаре подается
напряжение той же фазы питающей сети, что и на сам ИСН.
В устройстве синхронизации формируются прямоугольные разрешающие сигналы
РИ1 и РИ2, соответствующие положительным и отрицательным полупериодам питающего
напряжения. Эти сигналы используются в дальнейшем в РИ для разделения импульсов
управления по тиристорам VS1 и VS2. Одновибраторы ОВ 1 и ОВ
2 по фронту "0"/"1" сигналов Uр1 и Uр2 формируют на своих выходах короткие (до 50 мкс) импульсы,
которые суммируются на элементе "2ИЛИ-НЕ". Выходной сигнал УС Uсинх. представляет собой последовательность
коротких "провалов" с f=100
Гц, строго синхронизированных с сетевым напряжением и соответствующих точкам
естественного открывания тиристоров VS1 и VS2. ГОН представляет собой интегратор
И со сбросом. При наличии импульса Uсинх. транзистор
VT1 закрыт, и напряжение на выходе
интегратора UГОН нарастает по линейному закону. При
отсутствии импульса Uсинх. транзистор VT2 открывается и интегратор сбрасывается в ноль. Пилообразное
напряжение Uпилы подается на вход НО, где происходит
сравнение трех сигналов: напряжения управления (Uу), напряжения смещения (Uсм) и напряжения ГОН (Uпилы). Uу формируется САУ электроприводом. Uсм определяет максимальный угол
открывания, т.е. минимальное напряжение на якоре двигателя. В момент равенства
сигналов -Uпилы и Uсм -Uу компаратор DA2 меняет свое выходное состояние. По фронту сигнала UНО ФДИ формирует импульсы
открывания тиристоров по длительности (до четырех эл. градусов), т.е.
управление тиристорами осуществляется "узкими" импульсами (чтобы не
насыщались импульсные трансформаторы TV1 и ТV2).
РИ, выполненный на элементах "2И",осуществляет разделение
импульсов ФДИ, соответствующих требуемому углу a, на импульсы UФ 1 и UФ 2 для управления тиристорами VS1 и VS2.
Эти маломощные импульсы подаются на выходные формирователи ВФ 1 и ВФ 2 и через
импульсные трансформаторы TV1 и TV2 на управляющие электроды
соответствующих тиристоров VS1 и VS2.
8. Расчет
и построение внешней, регулировочной характеристик выпрямителя и регулировочной
характеристики СИФУ
.1 Внешняя
характеристика выпрямителя
Внешней характеристикой называется зависимость выходного напряжения U от тока нагрузки I при постоянном значении угла α.
Схема замещения выпрямителя показана на рисунке 9.1.
рис. 9.1. Схема замещения выпрямителя.
где Е- среднее значение выпрямленной ЭДС;a- суммарное активное
сопротивление последовательно включенных элементов схемы, по которым протекает
ток нагрузки в один и то же момент времени. Raр- активное
сопротивление анодного реактора, Ra= 0.01 Ом;k-
коммутационное сопротивление,
 ;
;
m-
пульсность схемы, m=2;a- индуктивное сопротивление анодного
реактора,  Ом
Ом
 Ом
Ом
 - сумма
падений напряжения на полупроводниковых приборах, по которым в данный момент
времени протекает ток нагрузки, =2.2 В;др-
активное сопротивление дросселя, Rдр=0.22 Ом.
- сумма
падений напряжения на полупроводниковых приборах, по которым в данный момент
времени протекает ток нагрузки, =2.2 В;др-
активное сопротивление дросселя, Rдр=0.22 Ом.
Согласно
схеме замещения внешняя характеристика выразится формулой


В режиме непрерывного тока, а также при представлении вентилей активными
сопротивлениями, внешние характеристики выпрямителя представляют собой ряд
параллельных прямых, наклоненных к оси тока.
Таким образом, внешние характеристики строим для углов a1=840 и a2=1530
по двум точкам: I=0 и I=IH.
Находим среднее значение выпрямленной ЭДС для cos a1 и cos a2:
При
I=0 A



При
I=Iн =28.5 А



На основании этих данных рассчитаем напряжения при соответствующих углах
управления и на основе полученных данных построим внешнюю характеристику.
График внешней характеристики изображен на рисунке 9.1.1.
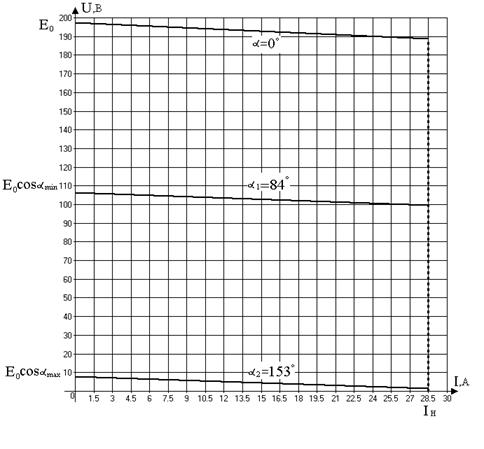
рис. 9.1.1. Внешние характеристики выпрямителя.
.2
Регулировочная характеристика выпрямителя
Регулировочная характеристика выпрямителя (рис. 9.2.) представляет собой
зависимость выпрямленной ЭДС Е от угла открывания a.
Регулировочная характеристика выпрямителя рассчитывается по выражению:
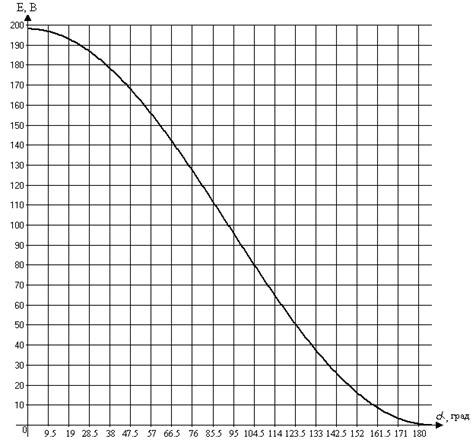
рис. 9.2. Регулировочная характеристика преобразователя.
.3
Регулировочная характеристика СИФУ
Регулировочной характеристикой СИФУ называется зависимость ула открывания
a от напряжения
управления Uу.
Для нессиметрично управляемого преобразователя с
регулировочная
характеристика СИФУ рассчитывается по выражению:
 .
.
 ,
,  .
.
Регулировочная
характеристика имеет вид, представленный на рисунке 9.3.
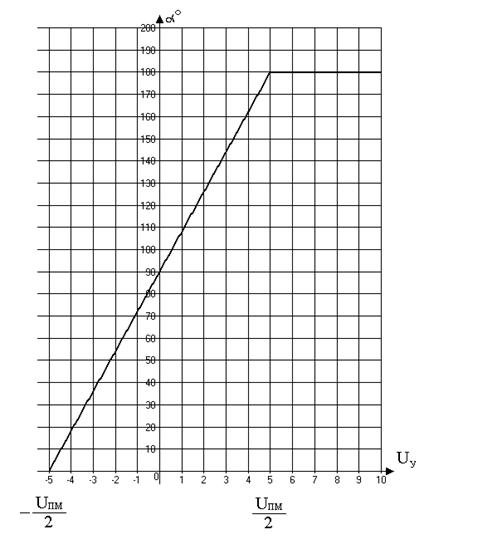
рис. 9.3. Регулировочная характеристика СИФУ.
Заключение
В процессе выполнения курсового проекта была спроектирована схема
однофазного мостового несимметрично управляемого выпрямителя для питания
двигателя постоянного тока. Для управлением этим двигателем была спроектирована
СИФУ с положительным пилообразным опорным напряжением с помощью которой,
подавая управляющие воздействие на полууправляемый выпрямитель, можно
осуществить регулирование скорости двигателя в заданных пределах. Также в
пояснительной записке дан литературный обзор различных систем управления
выпрямителями.
В графической части приведена полная принципиальная схема системы
управления и схема управляемого выпрямителя с подключенной к ней нагрузкой -
двигателем постоянного тока.
В курсовом проекте были рассчитаны и построены внешняя и регулировочная
характеристики выпрямителя, а также регулировочная характеристика
спроектированной СИФУ
. Справочник по полупроводниковым приборам на CD. Version 1.01/О.А. Шульгин, И.Б. Шульгина, А.Б. Воробьев. - Copyright (C) 1997, Laser Art.
. Конденсаторы: Справочник. Горячева Г.А., Добромыслов Е.Р. -
М.: Радио и связь, 1984.
4. Резисторы: Справочник/В.В. Дубровский, Д.М. Иванов, Н.Я.
Пратусевич и др.; Под ред. И.И. Четверткова и В.М. Терехова. - 2-е изд.,
перераб. И доп. - М.: Радио и связь, 1991.
. Малогабаритные трансформаторы и дроссели: Справочник/И.Н.
Сидоров, В.В. Мукосеев, А.А. Христинин. - М.: Радио и связь, 1985.
. Популярные микросхемы ТТЛ: Справочник/А.В. Прибыльский,
А.И. Сухопаров, С.В. Якбовский, С.А. Ельцова. - 1993.
. Силовая преобразовательная техника: методическое пособие к
курсовому проектированию./ Г.И. Гульков, Н.М. Улащик. - Минск: БНТУ, 2007.
. Справочник по электрическим машинам / Под ред. И.П.
Копылова и Б.К. Клокова. Т. 1,2. - М.: Энергоатомиздат, 1988.