Следящая система
Содержание
Введение
. Статический
расчет
.1 Выбор
исполнительного двигателя
.2 Выбор
измерителей рассогласования из условий точности
.3 Выбор
типа усилителя и определение величины его коэффициента усиления
.4 Определение
передаточного числа редуктора
.5 Выбор
рода тока и величины напряжения
.6 Описание
функциональной схемы
.7 Структурная
схема СС
. Динамический
расчет
.1 Постановка
задачи динамического синтеза
.2 Методика
синтеза последовательных корректирующих устройств
.3 Построение
ЛАЧХ системы
.4 Описание
корректирующего устройства
.5 Анализ
желаемой ПФ с помощью ЭВМ
Заключение
Список
используемой литературы
Приложение
Введение
В настоящее время во всем мире идет бурное развитие технологий управления
системами производства. Особую роль в научно-техническом прогрессе играют такие
видные направления как теория автоматизированного управления, теория управления
локальными системами. В связи с этим, очень важна подготовка специалистов в
данной области. Необходимой частью подготовки грамотного специалиста является
практическая сторона обучения, которая происходит в основном путем выполнения
им практических и лабораторных работ, закрепляющих навыки и дающих ему ценный
первоначальный опыт.
В процессе выполнения лабораторных и практических работ будущим специалистам
предстоит работа с лабораторным стендом, который и является ценным инструментом
для получения и закрепления полученных знаний.
1.Статический расчет
.1 Выбор исполнительного двигателя
Электродвигатели относятся к числу элементов СС, выпускаемых
промышленностью в виде ряда стандартных серий с определёнными данными:
мощностью, частотой вращения, моментом. Соотношение момента пуска МП и угловых
скоростей WХХ у двигателей
различных серий различно, поэтому электродвигатель выбирают не по моменту или скорости,
а по максимальной мощности. Выбор двигателя является приближённым, так как из
имеющейся серии двигателей выбирают тот, который с наименьшей погрешностью
обеспечивает требуемые скорости Wн и ускорение eн нагрузки, а затем его проверяют на тепловой режим и
перегрузочную способность.
Исходными данными для выбора мощности двигателя для случая слежения по
синусоидальному циклу, т.е. по закону qвых=qвых.макс.×sinwt, является статический момент инерции
нагрузки Mсн , момент инерции нагрузки Jн ,максимальный угол поворота
выходной оси qмакс и частота
качания выходной оси wк=2×p/Tк , где Tк -
период качания.
Определим закон изменения скорости выходной оси

где
Wмакс=qмакс×wк - максимальная скорость выходной оси.
Ускорение
выходной оси

где
eмакс=Wмакс×w2к - максимальное ускорение выходной оси.
В данном случае двигатель выбирается по эквивалентному
(среднеквадратическому) моменту
где
М - мгновенное значение момента двигателя,
 (1)
(1)
Тогда
 =
=
= , (2)
, (2)
где
 - эквивалентное среднеквадратичное ускорение.
- эквивалентное среднеквадратичное ускорение.
Найдём
оптимальное передаточное отношение редуктора i0, при котором
МЭ, определённое выражением (2), будет иметь минимальное значение, для чего
возьмём производную от МЭ по i и приравняем её нулю. В результате преобразований
получим
 (3)
(3)
Легко
показать, что вторая производная будет положительна, поэтому МЭ=f (i0)
будет иметь только минимальное значение. Подставляя значение i0 в
(2), найдём минимальное значение эквивалентного момента
 (4)
(4)
Так
как в выражении (4) неизвестно значение Jд , то для
определения мощности двигателя вводят два вспомогательных коэффициента:

По
каталогу выбирается двигатель, мощность которого определяется выражением P=a×b /a , где а - коэффициент форсировки (кратковременного
увеличения скорости двигателя сверх номинальной). Обычно, а принимают равным
1,1¸ 1,3.
Располагая
номинальными данными двигателя, определяем необходимое передаточное отношение
редуктора:

Далее
осуществляется проверка выбранного двигателя, из условия его нагрева, т.е. по
имеющимся паспортным данным двигателя и нагрузки по формуле (2) определяется МЭ
и сравнивается с МН . При этом должно выполнятся условие  .
.
Для
проверки двигателя по перегрузочной способности по формуле (1) определяется

и
сравнивается с номинальным моментом двигателя. Должно выполняться условие  или
или  где lм - коэффициент перегрузки двигателя по моменту.
где lм - коэффициент перегрузки двигателя по моменту.
При невыполнении хотя бы одного из указанных условий, необходимо выбрать
двигатель большей мощности и повторить расчёты.
1. Положение нагрузки в момент времени t



2. Скорость и ускорение рабочего цикла



3. Определим значение вспомогательных коэффициентов a и b
ток двигатель редуктор корректирующий

4. По каталогу выбираем двигатель, мощность которого должна быть
не менее значения, определяемого формулой
Выбираем
ближайший по мощности двухфазный асинхронный двигатель с полым ротором типа
АДП-123Б.
Передаточное число редуктора
5. Определяем эквивалентный момент по формуле
Э<Mдв.н
, 0,082 Н*м <0,095Н*м .
6. Определим максимальный требуемый момент
7. Коэффициент перегрузки двигателя по моменту
Так
как коэффициент перегрузки двигатели получился меньше единицы, а это значит,
что требуемый момент значительно меньше допустимого перегрузочного момента
выбранного двигателя. Следовательно, двигатель АДП123Б выбран правильно.

 = ((4
*10-6 +(1,37/479,32))*2*4,58)/ 0,52
= ((4
*10-6 +(1,37/479,32))*2*4,58)/ 0,52
Тдв=0.06с
Кдв=1,9рад
/ В×с wдв = 1/Тдв = 16.7с-1
1.2 Выбор измерителей рассогласования из условий
точности
Ошибки различных элементов следящих систем носят, как правило, случайный
характер, и их предельная величина ограничивается стандартами или техническими
условиями на соответствующий элемент. Систематические ошибка элементов, имеющие
определённую закономерность, легко выявить при наладке системы и устранить или
компенсировать. В общем случае ошибка следящей системы состоит из ошибок
отдельных ее элементов и из ошибок измерителей рассогласования (ИР):
 (9)
(9)
где
dи - погрешности 1го , 2го и т.д. элементов,
составляющих ИР;
di - погрешности всех других элементов СС.
Применяя формулу (9) необходимо погрешности всех элементов привести к
одной точке СС, чтобы сделать их соизмеримыми.
В связи с этим возникает вопрос о рациональном распределении общей ошибки
между ИР и остальными элементами СС. Если предположить, что погрешности ИР
настолько малы, что почти не влияют на результат (9), тогда можно считать, что
d0 » d (10)
где
d0 - погрешность всех остальных кроме ИР элементов.
Указанное условие считается выполненным, если  .
.
Подставив
уравнение (9) в (10) и заменяя фактические ошибки d их предельными значениями e, получим критерий
ничтожных погрешностей:
 (11)
(11)
Для
системы с одним ИР  . В случае, если имеется два ИР и их погрешности
одинаковы, то
. В случае, если имеется два ИР и их погрешности
одинаковы, то  . Если же в системе несколько измерительных элементов
с разными погрешностями, то последние должны быть распределены между
измерителями так, чтобы удовлетворить условию (11).
. Если же в системе несколько измерительных элементов
с разными погрешностями, то последние должны быть распределены между
измерителями так, чтобы удовлетворить условию (11).
Уравнение
(11) служит критерием ничтожных погрешностей и основанием для выбора точности
ИР для СС по заданной предельной ошибке воспроизведения e. Выбирая точность ИР по приведенному критерию, следует определять их
погрешность eи во всём диапазоне измеряемых величин и в том
диапазоне измеряемых величин и в том же режиме работы СС, для которого задаётся
ошибка воспроизведения.
Погрешности
всех элементов СС, в том числе и ИР, должны быть соизмеримыми, т.е.
приведенными к одной точке системы. Так как работа СС оценивается по величине
рассогласования между командной и исполнительной осями, то целесообразно
погрешности всех элементов приводить именно к этим осям.
Из технического задания: допустимая статическая ошибка qст = 2град, допустимая динамическая
ошибка qдин = 4град.
На основании критерия ничтожных погрешностей допустимая ошибка ИР во всем
диапазоне работы СС не должна превышать
 .
.
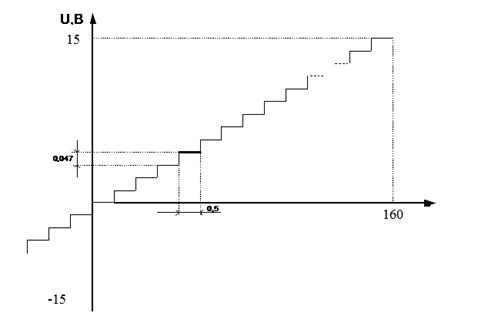
Предварительно
в качестве ИР возьмем датчик угла поворота, потенциометр с тремя ветками
обмотки на дуге 1 угла поворота.
угла поворота.
В
динамическом режиме ошибка ИР не должна быть более  , т.е.
, т.е. 
Условие точности выполняется во всём диапазоне работы ИР, следовательно,
в качестве ИР используем датчики угла поворота типа ПД-160 и ПП -160. Его
технические данные:
· Диапазон изменений рабочего угла поворота ……………160 град
· Сопротивление реостата …...………………………………160 Ом
· Допустимая мощность рассеивания…………………………..5 Вт
· Рабочее напряжение ..…………………………………………30 В
· Число витков
обмотки на дуге  угла поворота…………….3
угла поворота…………….3
· Необходимый
крутящий момент:
в начале перемещения... …………………………8 Г*см
в конце перемещения…………………………….20 Г*см
1.3 Выбор типа усилителя и определение величины
его коэффициента усиления
Усилители являются важнейшим звеном СС и служат для усиления сигнала
рассогласования системы до величины достаточной для управления исполнительным
двигателем. В усилителе совершаются необходимые преобразования над сигналом
рассогласования и сигналами обратных связей, а также вырабатываются сигналы,
корректирующие работу системы.
При выборе усилителя для СС необходимо руководствоваться следующими
факторами:
а) видом и величиной входного и выходного сигналов;
б) требуемо чувствительностью и инерционностью;
г) независимостью рабочих характеристик усилителя от температуры,
давления, влажности, вибрации, ударов и т.п.;
д) допустимыми габаритами и весом;
е) возможностью суммирования входных и корректирующих сигналов;
ж) особенностью работы системы, условиями ее эксплуатации и другими
техническими условиями.
Наиболее простая структура усилителя соответствует случаю, когда на его
вход поступает переменное напряжение сигнала, а на выходе включена нагрузка
переменного тока сравнительно большой мощности.
Такой усилитель состоит из трех частей: предварительного усилителя
(входной) каскад или усилителя напряжения входного сигнала, и усилителя
мощности (выходной каскад).
Определение коэффициента усиления усилителя является весьма важным
моментом проектирования СС. Коэффициент усиления входит в коэффициент усиления
всей СС и поэтому влияет на её устойчивость и качество. Известно, что ошибка СС
и её коэффициент усиления связаны однозначно и что на величину этой ошибки
оказывает влияние вид управляющего воздействия и параметры системы. Отсюда
следует, что если при расчёте СС задана величина её ошибки при определённых
видах управляющего воздействия и известны некоторые параметры системы, то можно
найти коэффициент усиления системы в целом, а значит и коэффициент усиления
усилителя.
Ку
= ,
,  = Ки Кд
Кмп=0,089
= Ки Кд
Кмп=0,089
где
Ки - коэффициент измерительного элемента;
Кд
- коэффициент передачи двигателя;
Кмп
- коэффициент механической передачи.



Кдв=1,9рад/Вс
lg156,15=43,87
.4 Выбор типа редуктора
Исполнительный
двигатель в СС, как правило, соединяется с исполнительной осью через понижающий
редуктор, что позволяет наиболее полно использовать двигатель по мощности т.е.
как по моменту, так и по скорости. Редуктор СС должен удовлетворять требованиям
в отношении габаритов, коэффициента полезного действия, люфта, инерционности и
надежности.
Пусть
редуктор имеет n - пар (рис. 2).
Рис.
2. Кинематическая схема передачи.
Результирующий
зазор (мёртвый ход) всего редуктора -  ,
приведенный к нагрузке, равен
,
приведенный к нагрузке, равен
где
 - передаточные числа соответствующей пары шестерён,
- передаточные числа соответствующей пары шестерён,
 -
мертвый ход соответствующей пары.
-
мертвый ход соответствующей пары.
Из
формулы (10) видно, что при зазор
редуктора тора в основном определяется зазором последней пары
(ближайшей к нагрузке).
Механический зазор определяется в паре зубчатых колес классом точности
изготовления шестерней и качеством сборки редуктора. Мёртвые ходы в редукторах
уменьшаются с помощью применения плавающих эксцентричных втулок, которые
помогают устранить несоответствие в межцентровых расстояниях, и разрезных
шестерен, мёртвый ход в которых выбирается автоматически.
Для того чтобы в СС не возникали автоколебания из-за зазора в редукторе,
должно иметь место следующее неравенство:
 ,
,
где
 - приведенный к выходной оси момент сил трения;
- приведенный к выходной оси момент сил трения;
 - момент
нагрузки;
- момент
нагрузки;
 -
коэффициент усиления всей системы по моменту, равный отношению момента,
развиваемого заторможенным двигателем на оси нагрузки (пускового момента), к
величине угла рассогласования;
-
коэффициент усиления всей системы по моменту, равный отношению момента,
развиваемого заторможенным двигателем на оси нагрузки (пускового момента), к
величине угла рассогласования;
 - ошибка
системы по моменту.
- ошибка
системы по моменту.
При
наличии в редукторе мёртвого хода  СС
оказывается разомкнутой в те промежутки времени, когда двигатель выбирает зазор
в редукторе. За это время система запасает дополнительное количество энергии, что
способствует возникновению качаний (автоколебаний), т.е. после отработки
рассогласования система по инерции продолжает двигаться, создавая
рассогласование противоположного знака, двигатель реверсируется, скова идёт
отработка мёртвого хода и т.д. Если же момент, развиваемый двигателем на оси
нагрузки, возникающий при рассогласовании системы на величину зазора, меньше
суммарного момента трения и момента сопротивления нагрузки
СС
оказывается разомкнутой в те промежутки времени, когда двигатель выбирает зазор
в редукторе. За это время система запасает дополнительное количество энергии, что
способствует возникновению качаний (автоколебаний), т.е. после отработки
рассогласования система по инерции продолжает двигаться, создавая
рассогласование противоположного знака, двигатель реверсируется, скова идёт
отработка мёртвого хода и т.д. Если же момент, развиваемый двигателем на оси
нагрузки, возникающий при рассогласовании системы на величину зазора, меньше
суммарного момента трения и момента сопротивления нагрузки  то, очевидно, никакого движения не будет, и автоколебания
не возникнут. В СС малой мощности, особенно в системах с двухфазным асинхронным
двигателем с полым ротором, большое значение имеет распределение общего
передаточного отношения редуктора между отдельными парами из условия
обеспечения наименьшего приведенного момента инерции. Момент инерции нескольких
первых шестерён может оказаться соизмеримым или даже в несколько раз большим
момента инерции ротора двигателя
то, очевидно, никакого движения не будет, и автоколебания
не возникнут. В СС малой мощности, особенно в системах с двухфазным асинхронным
двигателем с полым ротором, большое значение имеет распределение общего
передаточного отношения редуктора между отдельными парами из условия
обеспечения наименьшего приведенного момента инерции. Момент инерции нескольких
первых шестерён может оказаться соизмеримым или даже в несколько раз большим
момента инерции ротора двигателя
На рис. 3 приведены номограммы для определения передаточных отношений
отдельных пар редуктора при заданном общем передаточном отношении. Кривые
1,2,3,4 соответствуют редукторам, соответственно с двумя, тремя, четырьмя и
пятью парами шестерен.
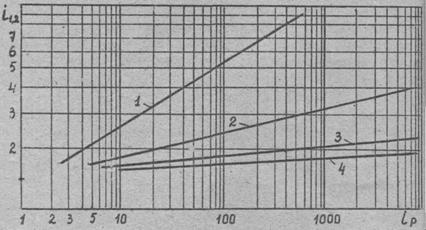
Рис.
3. Номограммы для определения передаточных отношений отдельных пар редуктора
(при  )
)
Передаточное
отношение i=479,3 необходимо оптимальным образом распределить
между отдельными парами. Причем рис.2.
Т.к.
номограммы даны только для пяти пар, то передаточное число последней пары
примем  .
.
Тогда
 .
.
Для
 из номограммы по кривой 4 определяем
из номограммы по кривой 4 определяем  .
.
Остается
распределить  .
.
Для
 по кривой 3 -
по кривой 3 -  .
.
По
кривой 2 для  -
-  .
.
По кривой 1 для 
 ;
;  .,2
= 1,5 i3,4 = 1,6 i5,6 = 2,3 i7,8 = 3,4 i9,10 = 5,1
.,2
= 1,5 i3,4 = 1,6 i5,6 = 2,3 i7,8 = 3,4 i9,10 = 5,1
Таким
образом, общее передаточное число
i= i1,2
*i3,4 *i5,6 *i7,8 *i9,10* i11,12=1,5*1,6*2,3*3,4*5,1*5=478,6
1.5 Выбор рода тока и величины напряжения
Вопрос о выборе тока (постоянного или переменного) при разработке и
расчёте СС является исключительно важным и вместе с тем наиболее сложным. Этот
вопрос решается на основе тщательного технико-экономического сопоставления
различных вариантов, а в отдельных случаях в зависимости от специфических
требований, предъявляемых к следящей системе.
Выбираем переменный ток т.к. он имеет целый ряд весьма существенных,
преимуществ перед постоянным током. Прежде всего, электродвигатели переменного
тока по своей конструкции значительно проще и более надёжны в эксплуатации. При
выборе переменного тока всегда следует отдавать предпочтение повышенной частоте
400 Гц, т.к. это дает возможность значительно снижать габариты и массу
используемой аппаратуры.
Выбираем номинальное напряжение Uном = 110В; выбор того или иного номинального напряжения для СС в
основном определяется экономичностью и требованиями техники безопасности. Выбор
рода тока, величин напряжения и частоты очень часто зависит от условий питания
всего комплекса приборов входящих в СС. При этом иногда возможно использовать
комбинированное питание СС. При этом следует избегать преобразований тока, т.к.
это приводит к повышению эксплутационных расходов.
1.6 Описание функциональной схемы
Функциональная схема изображена на рис. 1.6.1. Задающее воздействие
поступает на измеритель рассогласования, который согласовывает работу задающего
устройства и двигателя, измеряя угол рассогласования. Предварительный усилитель
служит для усиления сигнала рассогласования системы. Включение в систему
корректирующего устройства обеспечивает получение нужных показателей качества:
величины перерегулирования, времени регулирования, ошибки в установившемся
режиме,

Рис 1.6.1. Функциональная схема следящей системы.
ИР - Измеритель рассогласования; ПУ - предварительный усилитель; КУ -
корректирующее устройство; М - модулятор; УМ - усилитель мощности; Д -
двигатель; Р - редуктор.
2. Динамический расчет
.1 Постановка задачи динамического синтеза
Под динамическим синтезом системы понимают такое её исследование, в
результате, которого по заданным показателям качества находят необходимую
структуру схемы, параметры её элементов и способы реализации найденной
структурной схемы. Эта задача, называемая общей задачей синтеза, сложная.
Частной задачей синтеза является синтез корректирующих устройств, и он
заключается в следующем. Имеется исходная система автоматического управления,
структура и параметры основных функционально необходимых элементов, которой
известны. Требуется определить передаточные функции, схемы и параметры
корректирующих устройств, включение которых в схему обеспечит получение нужных
показателей качества: величины перерегулирования, времени регулирования, ошибки
в установившемся режиме.
Наиболее простым, наглядным и хорошо разработанным инженерным методом
синтеза корректирующих устройств является метод логарифмических
амплитудно-частотных характеристик (ЛАЧХ).
Синтез методом ЛАЧХ основан на связи переходной функции с вещественной
частотной характеристикой (ВЧХ) замкнутой системы, которая связана с ЛАЧХ
разомкнутой системы. Благодаря такой связи можно переходить от показателей
качества к параметрам ВЧХ и к параметрам ЛАЧХ системы, т.е. возможно по
заданные показателям качества системы строить желаемую ЛЧХ системы.
Желаемой ЛАЧХ принято называть такую частотную характеристику системы,
при которой обеспечиваются заданные показатели качества.
При синтезе корректирующих устройств (КУ) систем автоматического
управления (САУ) методом ЛАЧХ обычно принят следующий порядок решения задачи.
1. Строят
ЛАЧХ нескорректированной системы с учётом требуемого коэффициента усиления
системы  в разомкнутом состоянии. Коэффициент находят из условия получения ошибки в установившемся
режиме не выше заданной.
в разомкнутом состоянии. Коэффициент находят из условия получения ошибки в установившемся
режиме не выше заданной.
. По
заданным показателям качества (перерегулирование  , время
регулирования
, время
регулирования  и ошибка установившемся режиме
и ошибка установившемся режиме  ) с учётом ЛАЧХ нескорректированной системы строят
желаемую ЛАЧХ.
) с учётом ЛАЧХ нескорректированной системы строят
желаемую ЛАЧХ.
. На
основании желаемой ЛАЧХ и ЛАЧХ нескорректированной системы определяют ЛАЧХ
корректирующего устройства.
. По
полученной ЛАЧХ КУ находят передаточную функцию НУ и подбирают наиболее простой
способ его реализации. Определяют параметры КУ и его ЛАЧХ.
. Строят
окончательную ЛАЧХ скорректированной системы с учётом ЛАЧХ реального КУ и
определяют её показатели качества.
2.2 Методика синтеза последовательных
корректирующих устройств
Для обеспечения устойчивости и надлежащего качества переходного процесса
СС в неё включают КУ. Различают два способа включения КУ в систему:
последовательный и параллельный. В первом случае КУ включается в главную цепь
системы последовательно с нескорректированной системой. Во втором случае КУ
включается в цепь дополнительной обратной связи, охватывающей часть
нескорректированной системы.
Последовательный способ включения КУ обычно применяют в маломощных СС для
повышения устойчивости и ускорения переходного процесса или уменьшения
установившихся ошибок. При последовательном включении КУ происходит ослабление
сигнала ошибки и поэтому приходиться увеличивать коэффициент усиления усилителя
СС. Это приводит к усложнению схемы усилителя, к тому же наряду с полезными
сигналами происходит усиление сигналов помех. Задача синтеза КУ состоит в
выборе места включения КУ в систему, расчете его параметров и определении схемы
устройства. Исходными данными для рассматриваемой задачи являются
характеристики нескорректированной системы и требования, предъявляемые к ее
качеству и устойчивости.
При последовательном включении КУ ЛАЧХ системы можно представить в виде:
 , (2.2.1)
, (2.2.1)
где
 - ЛАЧХ нескорректированной системы;
- ЛАЧХ нескорректированной системы;
 - ЛАЧХ
последовательно включённого КУ.
- ЛАЧХ
последовательно включённого КУ.
Из
выражения (11) определяем ЛАЧХ КУ:
 (2.2.2)
(2.2.2)
2.3 Построение желаемой ЛАЧХ системы
Обычно желаемая ЛАЧХ большинства следящих систем разделяется на три
части. Рассмотрим отдельно построение каждой из этих частей: низкочастотной, среднечастотной
и высокочастотной.
. Выбор параметров низкочастотной части ЛАЧХ целесообразнее всего
сделать из условий требуемой точности, определяемой допустимой величиной
установившейся ошибки. Так как наклон ЛАЧХ в области низких частот определяется
числом интегрирующих звеньев (степенью астатизма) в системе, то он оказывается
заданным, как только выбрана структура системы. Если в системе одно
интегрирующее звено (исполнительный двигатель), то наклон низкочастотной части
ЛАЧХ равен - 20 дБ/дек;
Единственным параметром, который должен быть выбран для получения
требуемой точности в установившемся режиме, является коэффициент усиления
разомкнутой системы.
Для
системы с астатизмом первого порядка, когда входной вал равномерно вращается со
скоростью W, установившаяся ошибка  . Отсюда
определяется необходимый коэффициент усиления системы.
. Отсюда
определяется необходимый коэффициент усиления системы.
Для
окончательного построения низкочастотной ЛАЧХ нужно отложить при w = 1 ординату, равную 20lg К, и через, полученную точку провести прямую с
наклоном -20 дБ/дек.
Однако
в реальных случаях на вход системы поступает сигнал произвольной формы. Тогда
по кривым изменения входного сигнала следует построить кривую изменения
скорости и выбрать по ней максимальную скорость, исходя, из которой определить
требуемый коэффициент усиления системы. Практически строится запретная зона для
ЛАЧХ исходя из условий точности, для этого определяется контрольная частота  с-1 и модуль передаточной функции разомкнутой системы
при w = wК
с-1 и модуль передаточной функции разомкнутой системы
при w = wК
 дб
дб
Здесь
 - максимальное входное ускорение;
- максимальное входное ускорение;  - максимальная входная скорость;
- максимальная входная скорость;  - максимальная допустимая шибка. Желаемая ЛАЧХ в
низкочастотной области формируется так, чтобы она проходила выше точки
- максимальная допустимая шибка. Желаемая ЛАЧХ в
низкочастотной области формируется так, чтобы она проходила выше точки  на 3 дБ, что соответствует увеличению коэффициента
усиления в
на 3 дБ, что соответствует увеличению коэффициента
усиления в  раз.
раз.
2. Среднечастотная часть ЛАЧХ является наиболее важной, т.к. она
определяет устойчивость и качество процессов системы в переходных режимах.
Практически найдено, что желаемая ЛАЧХ при частоте среза должна иметь наклон
-20 дБ/дек, а частота среза может быть определена из рис. 5 по заданной
величине s = 35%
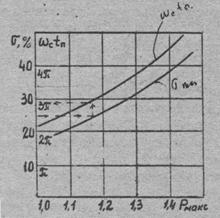
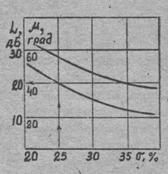
Рис. 5. Кривые для определения Рис. 6. Кривые для
определения запаса частоты среза устойчивости по модулю и по
фазе.
При s = 35%
wс×tп = 4,2p ® wс = 4.2p/tп = 4,2*3,14/0,6=22.8
Lg wc=lg 22,8=1,36
Частота
излома w3 ЛАЧХ может быть определена исходя из требований
обеспечения необходимого запаса устойчивости по амплитуде по заданному значению
величины максимального перерегулирования  , %, для
чего из графика (рис. 6) определяют величину
, %, для
чего из графика (рис. 6) определяют величину  , дБ. При
sмакс = 35% =12дБ. По
полученному значению определяется величина w3 = 100. ,
, дБ. При
sмакс = 35% =12дБ. По
полученному значению определяется величина w3 = 100. ,
w2 » wс 2/w3 = 22,82/100 = 5,18
w2=0.714
После
построения среднечастотной части она сопрягается с низкочастотной участками
прямых с наклоном -40 дБ/дек.
3. Высокочастотная ЛАЧХ обычно, чтобы не усложнять КУ, принимается
такой же, как и в нескорректированной системе.
Далее строим ЛАЧХ корректирующего устройства, используя формулу (12).
Передаточная функция желаемой ЛАЧХ:
Для
построения ФЧХ определим формулу:
 ,
,
где
Т3 = 1/w3 = 0,01c T2 = 1/w2 = 0.19c T1 = 1/w1 = 0.8c
Примечание: Графики и все математические расчеты выполнены в среде
математического анализа MathCAD
2001 Professional.
2.4 Описание коректирующего устройства

2.5Анализ ДФ с помощью ЭВМ
Для этой цели используем программную систему MDSPC. Данная программа с точки зрения архитектуры своего
построения представляет собой увязанный воедино комплекс программных модулей,
каждый из которых является логически законченным алгоритмом и выполняет
определенную функцию, например: ввод структуры и параметров, вывод результатов
и др.
Для удобства исследование разобьём желаемую ДФ на три звена:
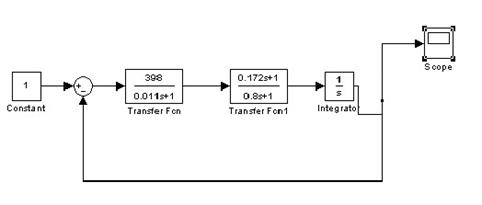
Рис.2.5.1 Структурная схема.
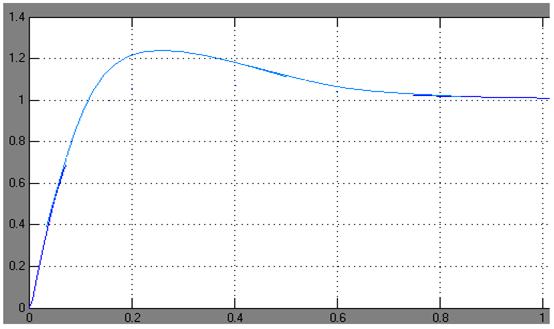
Рис.2.5.2. Переходная характеристика.

Как
видно из результатов моделирования время регулирования и перерегулирование
соответствуют заданию.
Заключение
Так
как полученные показатели качества системы s = 20% tп = 0.4 с не превышают исходные данные s =35% tп = 0.6с, то это значит, что все элементы и параметры следящей системы
были выбраны правильно.
Система
обеспечивает инвариантность по отношению к линейно изменяющемуся задающему
воздействию. Это в свою очередь позволяет отрабатывать с приемлемой ошибкой
более сложные сигналы.
Система
может применятся во многих отраслях промышленности, на пример СС можно
использовать при управлении радарами, телескопами и т.д.
Литература
1. Основы
проектирования следящих систем /Под ред. Н.А. Лакоты. М.: Машиностроение, 1978.
391 с.
2. Волков
Н. И., Миловзоров В.П. Электромашинные устройства автоматики: Учеб. для вузов
по спец. “Автоматика и телемеханика". 2-е изд., перераб. и доп. М.,:
Высшая шк., 1986,335 с.
. Сборник
задач по теории автоматического регулирования / Под ред. В. А. Бессекерского.
М.: Наука, 1978. 391 с.