Разработка системы автоматического управления
Структурная схема проектируемой системы
автоматического управления представлена следующим образом
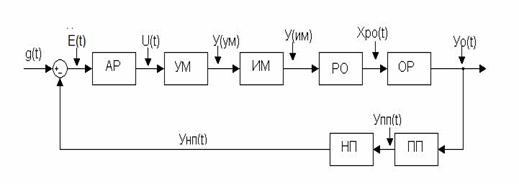
Где:
АР- автоматический регулятор
УМ- усилитель мощности
ИМ- исполнительный механизм
РО- рабочий орган
ОР-объект регулирования
ПП- первичный преобразователь
НП- нормирующий преобразователь
На основании заданных уравнений связи элементов
разрабатываемой системы уравнения получим передаточные функции элементов
I. Уравнение объекта регулирования:

Преобразуем его в операторный вид:

Затем получим передаточную функцию:
II. Уравнения первичного преобразователя:
Преобразуем его в операторный вид:

Затем получим передаточную функцию:
III. Уравнение нормирующего преобразователя:
Преобразуем его в операторный вид:
Затем получим передаточную функцию:

IV. Уравнения элемента сравнения:


V. Регулятор линейного типа в общем случае
состоит из трех составляющих (пропорциональной, интегральной и
дифференциальной):

VI. Усилитель мощности:
Преобразуем его в операторный вид:

Затем получим передаточную функцию:

VII. Уравнение Исполнительного механизма:
Преобразуем его в операторный вид:
Затем получим передаточную функцию:
VIII. Уравнение регулирующего органа:
Преобразуем его в операторный вид:

Затем получим передаточную функцию:
Cоставим
алгоритмическую структурную схему системы автоматического управления на основе
заданных уравнений
Далее найдем, неизвестную Кп, при этом в ходе
предварительных расчетов мы можем пренебречь инерционностью первичного
преобразователя и в итоге получим следующее характеристическое уравнение
системы:

Звено запаздывания  приближенно
заменяется рядом Паде:
приближенно
заменяется рядом Паде:


По граничному критерию устойчивости
Гурвица:







Построим область устойчивости для
зависимости  .
.
Табл.1. Значения  и
и  для границы
устойчивости.
для границы
устойчивости.
|
Кu
|
Kп
|
|
0
|
0,000083
|
|
1,5
|
4
|
|
0,5
|
2,8
|
|
0,2
|
1,8
|
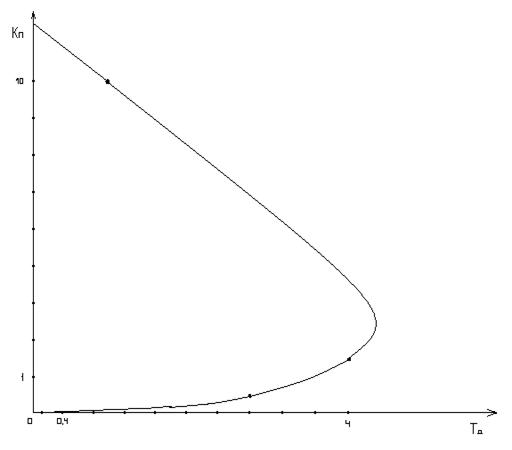
Рис. 1. Область устойчивости разрабатываемой
системы.
Для проверки рассчитанных значений возьмем одну
из точек на границе устойчивости и построим график переходного процесса:
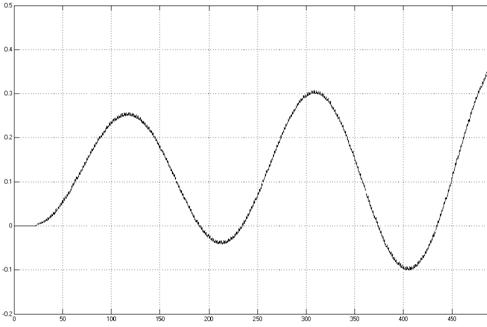
Рис.2. Переходный процесс для границы
устойчивости.
С помощью приложения Simulink
программы Matlab и
оптимизирующего блока NCD
outport получаем
оптимальные настройки ПД регулятора:


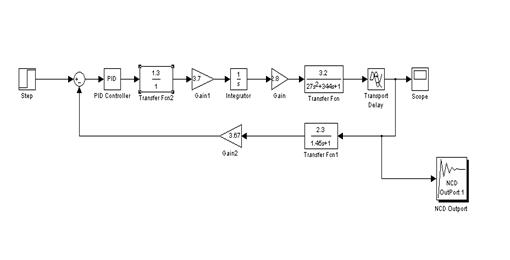
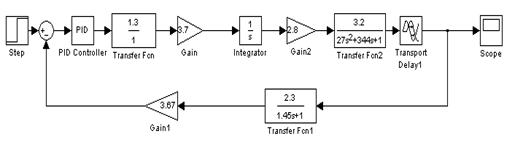
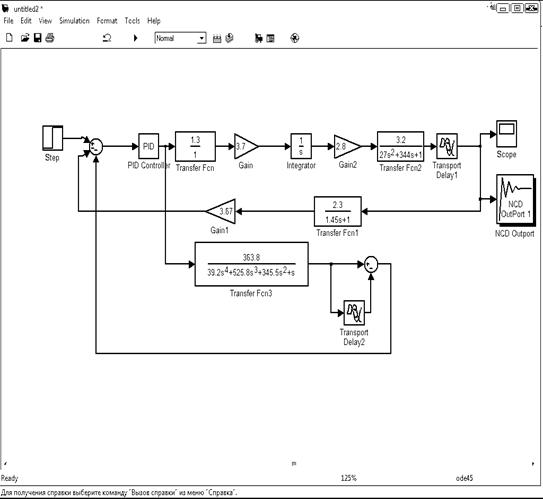
Рис.3. Структурная схема системы с
оптимизирующим блоком NCD Outport.
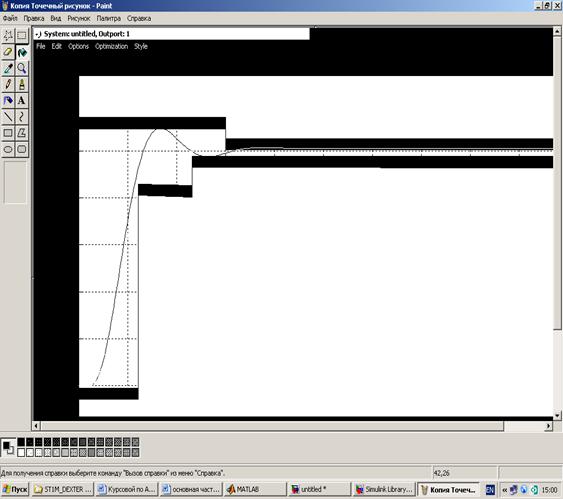
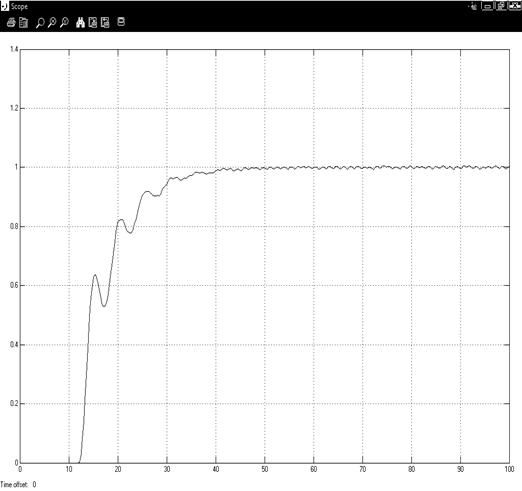
Рис.4.Оптимизация переходного
процесса с помощью блока NCD Outport.
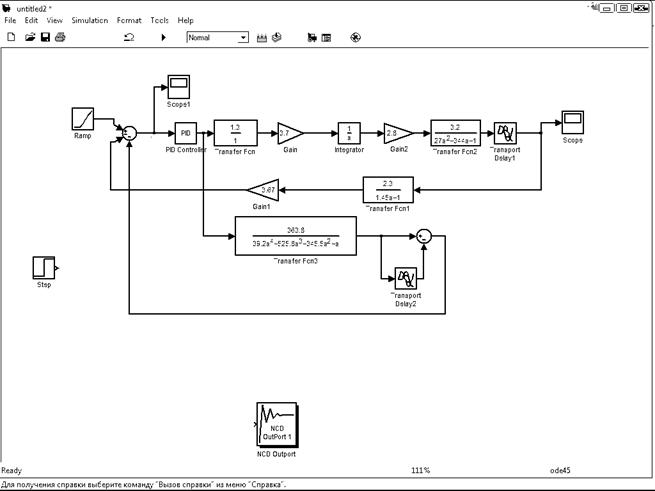
Проверим динамическую ошибку и
построим структурную схему:
регулятор автоматический
управление система
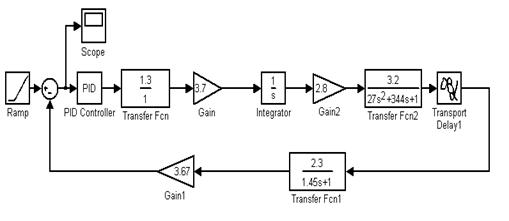
Рис.5. Алгоритмическая структурная схема для
определения динамической ошибки системы.
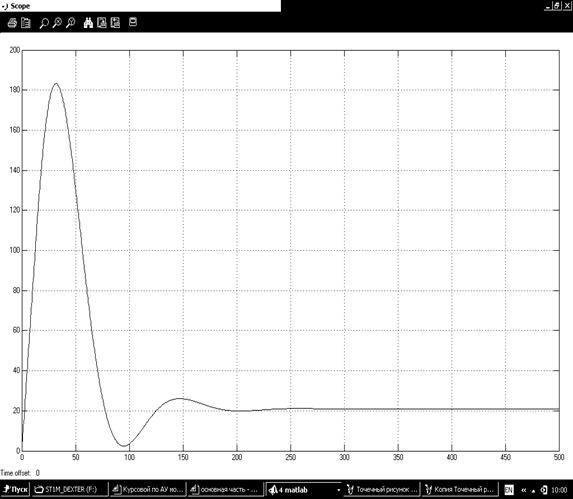
Рис.6. Переходный процесс динамической ошибки
разрабатываемой системы.
После оптимизации блоком NCD Outport был получен
более качественный график со значениями:  ;
;  ; s=0; tрег.»40сек.
; s=0; tрег.»40сек.
Проверим динамическую ошибку в схеме с
упредителем Смитта:
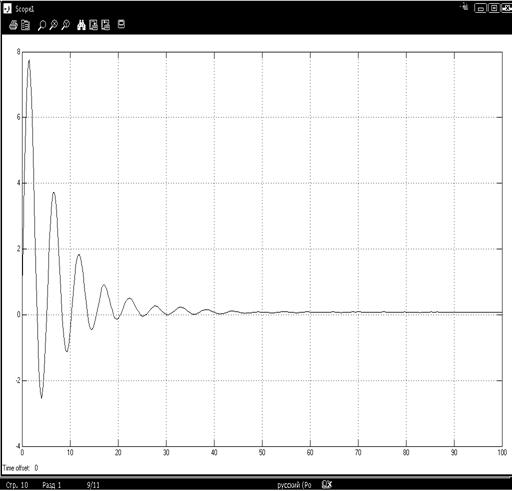
В результате получили динамическую ошибку
стремящуюся к 0.
Вывод
1. Была
получена передаточная функция замкнутой системы, а так же характеристическое
уравнение.
2. При
использование известных критерий устойчивости были получены условия для границы
устойчивости.
3. На
основании заданных качественных показателей были выбраны оптимальные настройки
регулятора: