Анализ нелинейных систем автоматического управления
Новосибирский
государственный технический университет
Кафедра
электропривода и автоматизации промышленных установок
КУРСОВАЯРАБОТА
по
дисциплине «Теория автоматического управления»
на тему:
Анализ
нелинейных систем автоматического управления
Студент:
Тишининов Ю.С.
Группа
Эма-71
Руководитель
курсовой работы
Лютц
С.В.
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ:
1.
Исследовать САУ с заданной структурной схемой, видом нелинейности и числовыми
параметрами методом фазовой плоскости.
.1
Проверить результаты расчетов по пункту 1 с помощью структурного моделирования.
.2
Исследовать влияние входного воздействия и параметров нелинейности на динамику
системы.
.
Исследовать САУ с заданной структурной схемой, видом нелинейности и числовыми
параметрами методом гармонической линеаризации.
.1
Проверить результаты расчетов по пункту 2 с помощью структурного моделирования.
.2
Исследовать влияние входного воздействия и параметров нелинейности на динамику
системы
1. Исследуем САУ с заданной структурной схемой,
видом нелинейности и числовыми параметрами методом фазовой плоскости.
Вариант №4-1-а
Исходные данные.
) Структурная схема нелинейной САУ:

Рис. 1.1
Система, в которой рабочие операции и операции
управления выполняют технические устройства, называется системой
автоматического управления (САУ).
Структурной схемой
называется графическое изображение математического описания системы.
Звено на структурной схеме изображается в виде
прямоугольника с указанием внешних воздействий и внутри него записывается
передаточная функция.
Совокупность звеньев совместно с линиями связи,
характеризующими их взаимодействие, образует структурную схему.
) Параметры структурной схемы:
К1 = 10
К2 = 1,5
Т1 = 0,01
Т2 = 0,03
) Вид и параметры нелинейности:
Рис. 1.2
Метод фазовой плоскости
Поведение нелинейной системы в любой момент
времени определяется управляемой переменной и ее (n−1)
производной, если эти величины отложить по осям координат, то полученное n−мерное
пространство будет называться фазовым пространством. Состояние системы в каждый
момент времени будет определяться в фазовом пространстве изображающей точкой.
Во время переходного процесса изображающая точка перемещается в фазовом
пространстве. Траектория ее движения называется фазовой траекторией. В
установившемся режиме изображающая точка находится в состоянии покоя и
называется особой точкой. Совокупность фазовых траекторий для различных
начальных условий, совместно с особыми точками и траекториями называется
фазовым портретом системы.
При исследовании нелинейной системы данным
методом необходимо структурную схему (рис. 1.1) преобразовать к виду:
Знак минус говорит о том, что обратная связь
отрицательная.
где X1 и X2 - выходная
и входная величины линейной части системы соответственно.

Рис. 1.3
Найдем дифференциальное уравнение
системы:

Произведем замену  , тогда
, тогда

Решим это уравнение относительно
старшей производной:

Положим, что:
 ,(1.1)
,(1.1)
тогда
 (1.2)
(1.2)
Разделим уравнение (1.2) на
уравнение (1.1) и получим нелинейное дифференциальное уравнение фазовой
траектории:
 (1.3)
(1.3)
где x2 = f(x1).
Если решать это ДУ методом изоклин,
то можно построить фазовый портрет системы для различных начальных условий.
Изоклиной называется геометрическое
место точек фазовой плоскости, которые фазовая траектория пересекает под одним
и тем же углом.
В данном методе нелинейная
характеристика делится на линейные участки и для каждого из них записывается
линейное ДУ.
Для получения уравнения изоклины
правая часть уравнения (1.3) приравнивается к постоянной величине N и решается
относительно  .
.
 (1.4)
(1.4)
Учитывая нелинейность, получаем:
) 


) 


) 

Задаваясь значениями N в диапазоне
от  до
до  , строится
семейство изоклин. На каждой изоклине проводится вспомогательная прямая под
углом
, строится
семейство изоклин. На каждой изоклине проводится вспомогательная прямая под
углом  к оси
абсцисс
к оси
абсцисс
 ,(1.5)
,(1.5)
где mX -
масштабный коэффициент по оси х;
mY -
масштабный коэффициент по оси у.
Выбираем mX= 0,2 ед/см,
mY= 40 ед/см;
Конечная формула для угла:

Рассчитаем семейство изоклин и угол
для участка  , расчет
сведем в таблицу 1:
, расчет
сведем в таблицу 1:
Таблица
1
|
N
|
0
|
18,75
|
45
|
84,375
|
150
|
281,25
|
675
|
|
x1
|
-60
|
-60
|
-60
|
-60
|
-60
|
-60
|
-60
|
|
Y’
|
14000
|
12000
|
10000
|
8000
|
6000
|
4000
|
2000
|
|
x11
|
-20
|
-20
|
-20
|
-20
|
-20
|
-20
|
-20
|
|
Y’’
|
13555,56
|
11619,05
|
9682,54
|
7746,032
|
5809,524
|
3873,016
|
1936,508
|
|
a
|
0
|
5.35
|
12.7
|
23
|
37
|
54.5
|
73.5
|
|
N-900-506,25-375-309,375-270-243,75-225
|
|
|
|
|
|
|
|
|
x1
|
-60
|
-60
|
-60
|
-60
|
-60
|
-60
|
-60
|
|
Y’
|
-2000
|
-4000
|
-6000
|
-8000
|
-10000
|
-12000
|
-14000
|
|
x11
|
-20
|
-20
|
-20
|
-20
|
-20
|
-20
|
-20
|
|
Y’’
|
-1936,51
|
-3873,02
|
-5809,5
|
-7746,03
|
-9682,54
|
-11619
|
-13555,6
|
|
a
|
-77.47
|
-68
|
-62
|
-57
|
-53.47
|
-51
|
-
48
|
Рассчитаем семейство изоклин и угол
для участка  , расчет
сведем в таблицу 2:
, расчет
сведем в таблицу 2:
Таблица
2
|
N018.744584,375150281,25675
|
|
|
|
|
|
|
|
|
x1
|
-20
|
-20
|
-20
|
-20
|
-20
|
-20
|
-20
|
|
Y’
|
13555.5
|
11619
|
9355
|
7746
|
5809
|
3873
|
1936
|
|
x11
|
-10
|
-10
|
-10
|
-10
|
-10
|
-10
|
-10
|
|
Y’’
|
111.111
|
95.23
|
78.49
|
63.49
|
47.62
|
31.74
|
15.87
|
|
a
|
0
|
5.4
|
12.5
|
23
|
37
|
54.5
|
73.5
|
|
N-900-506,25-375-309,375-270-243,75-225
|
|
|
|
|
|
|
|
|
x1
|
-20
|
-20
|
-20
|
-20
|
-20
|
-20
|
-20
|
|
Y’
|
-1936.5
|
-3873
|
-5809.5
|
-7746
|
-9682.5
|
-11619
|
-13555
|
|
x11
|
-10
|
-10
|
-10
|
-10
|
-10
|
-10
|
-10
|
|
Y’’
|
-15.873
|
-31.746
|
-47.619
|
-63.49
|
-79.36
|
-95.24
|
-111.11
|
|
a
|
-77.5
|
-68.5
|
-62
|
-57
|
-53.5
|
-51
|
-48
|
Рассчитаем семейство изоклин и угол
для участка  , расчет
сведем в таблицу 3:
, расчет
сведем в таблицу 3:
Таблица
3
|
N
|
0
|
18.74
|
45
|
84,375
|
150
|
281,25
|
675
|
|
x1
|
-10
|
-10
|
-10
|
-10
|
-10
|
-10
|
-10
|
|
Y’
|
111.11
|
95.23
|
78.49
|
63.49
|
47.62
|
31.74
|
15.87
|
|
x11
|
10
|
10
|
10
|
10
|
10
|
10
|
10
|
|
Y’’
|
-111.11
|
-95.23
|
-78.49
|
-63.49
|
-47.62
|
-31.74
|
-15.87
|
|
a
|
0
|
5.4
|
12.5
|
23
|
37
|
54.5
|
73.5
|
|
N
|
-900
|
-506,25
|
-375
|
-309,375
|
-270
|
-243,75
|
-225
|
|
x1
|
-10
|
-10
|
-10
|
-10
|
-10
|
-10
|
-10
|
|
Y’
|
-15.873
|
-31.746
|
-47.619
|
-63.49
|
-79.36
|
-95.24
|
-111.11
|
|
x11
|
10
|
10
|
10
|
10
|
10
|
10
|
10
|
|
Y’’
|
15.873
|
31.746
|
47.619
|
63.49
|
79.36
|
95.24
|
111.11
|
|
a
|
-77.5
|
-68.5
|
-57
|
-53.5
|
-51
|
-48
|
Построим фазовую траекторию
Для этого выбираются начальные условия на одной
из изоклин (точка А), из точки А проводятся две прямые линии до пересечения со
следующей изоклиной под углами α1,
α2, где α1,
α2 − соответственно
углы первой и второй изоклины. Отрезок, отсекаемый этими линиями, делится
пополам. Из полученной точки, середины отрезка, вновь проводятся две линии под
углами α2,
α3, и вновь отрезок
делится пополам и т.д. Полученные точки соединяются плавной кривой.
Семейства изоклин строятся для каждого линейного
участка нелинейной характеристики и разделяются между собой линиями
переключения.
По фазовой траектории видно, что получена особая
точка типа устойчивый фокус. Можно сделать вывод, что автоколебаний в системе
нет, а переходный процесс устойчивый.
1.1 Проверим результаты расчетов с помощью
структурного моделирования в программе MathLab
Структурная схема:
Рис. 1.4
Фазовый портрет:
Рис. 1.5
Переходный процесс при входном воздействии
равном 2:
Рис. 1.6
Xвых.max
= 1.6
Xвых.∞ = 1
Nкол = 6
Трег = 0,1
.2 Исследуем влияние входного воздействия и
параметров нелинейности на динамику системы
Увеличим входной сигнал до 10:
Рис. 1.7
Xвых.max
= 14,3
Xвых.∞ = 8.5
Ккол = 5
Трег = 0,055
Увеличим входной сигнал до 100:
Рис. 1.8
X вых. max
= 103
X вых.∞ = 98
К кол = 5
Т рег = 0,18
Увеличим зону чувствительности до 15:
Рис. 1.9
Xвых.max
= 0,81
Xвых.∞ = 0,5
Ккол = 6
Трег = 0,11
Уменьшим зону чувствительности до 1:
Рис. 1.10
Xвых.max
= 3.2
Xвых.∞ = 1.8
Ккол = 8
Трег = 0,09
Выводы:
Результатами моделирования были подтверждены
результаты расчетов: из рисунка 1.7 видно, что процесс сходящийся,
автоколебаний в системе нет. Фазовый портрет смоделированной системы схож с
построенным расчетным путем.
Исследовав влияние входного воздействия и
параметров нелинейности на динамику системы, можно сделать выводы:
) при увеличении входного воздействия
увеличивается уровень установившегося режима, количество колебаний не меняется,
время регулирования увеличивается.
) при увеличении мертвой зоны уровень
установившегося режима увеличивается, количество колебаний также остается
неизменным, время регулирования увеличивается.
2. Исследуем САУ с заданной структурной схемой,
видом нелинейности и числовыми параметрами методом гармонической линеаризации.
Вариант №5-20-c
Исходные данные.
) Структурная схема:
Рис. 2.1
) Значения параметров:
k1 =
15.5
k2 =
2.2
T1 =
0,39 с
Т2 = 0,3 с
Т3 = 0,14 с
) Вид и параметры нелинейности:
Рис. 2.2
Наиболее широкое распространение для
исследования нелинейных САУ высокого порядка (n
> 2) получил приближенный метод гармонической линеаризации с применением
частотных представлений, развитых в теории линейных систем.
Основная идея метода сводится к следующему.
Пусть замкнутая автономная (без внешних воздействий) нелинейная система состоит
из последовательно включённых нелинейного безынерционного НЗ и устойчивой или
нейтральной линейной части ЛЧ ( рис 2.3, а)
a) НЗ=0
x z Х=Хmsinwt
z y
б) ЛЧ
y = Ym1
sin (wt +  )
)
-
Рис. 2.3
Для суждения о возможности существования
моногармонических незатухающих колебаний в этой системе предполагается, что на
входе нелинейного звена действует гармонический синусоидальный сигнал x(t)
= Xm
sinwt (Рис. 2.3,б). При
этом сигнал на выходе нелинейного звена z(t)
= z[x(t)]
содержит спектр гармонических составляющих с амплитудами Zm1,
Zm2,
Zm3,
и т.д. и частотами w, 2w,
3w и т.д.
Предполагается, что этот сигнал z(t),
проходя через линейную часть Wл(jw),
фильтруется ею в такой степени, что в сигнале на выходе линейной части y(t)
можно пренебречь всеми высшими гармониками Ym2,
Ym3
и т.д. и считать, что
y(t) Ym1sin(wt + )
Ym1sin(wt + )
Последнее предположение носит
название гипотезы фильтра и выполнение этой гипотезы является необходимым
условием гармонической линеаризации.
Условие эквивалентности схем,
изображенных на рис. 2.3, а и б, можно сформулировать в виде равенства
x(t) + y(t) = 0(1)
При выполнении гипотезы фильтра y(t) = Ym1sin(wt + ) уравнение
(1) распадается на два
Xm = Ym1(2)
= (3)
(3)
Уравнение (2) и (3) носят название
уравнений гармонического баланса; первое из них выражает баланс амплитуд, а
второе - баланс фаз гармонических колебаний.
Таким образом, для того, чтобы в
рассматриваемой системе существовали незатухающие гармонические колебания, при
соблюдении гипотезы фильтра должны выполняться условия (2) и (3)
Воспользуемся методом Гольдфарба для
графоаналитического решения характеристического уравнения вида
WЛЧ
(p) WНЭ
(A) +1 = 0 jwЛЧ(jw)
WНЭ(A)
= -1
jwЛЧ(jw)
WНЭ(A)
= -1

Для приближенного определения автоколебаний
строятся АФЧХ линейной части системы и обратная отрицательная характеристика
нелинейного элемента.
Для построения АФЧХ линейной части преобразуем
структурную схему к виду рис 2.4:
Рис 2.4
В результате преобразования получаем схему рис
2.5:
Найдем передаточную функцию линейной части
системы:

Заменим  :
:

Избавимся от иррациональности в знаменателе,
домножив числитель и знаменатель на сопряженное к знаменателю, получим:

Разобьем получившееся на мнимую и действительную
части:


Для построения обратной отрицательной
характеристики нелинейного элемента воспользуемся формулой:
где  ,
,
 - параметры
нелинейности:
- параметры
нелинейности:
 ,k=10
,k=10
А - амплитуда, при условии что  .
.
АФЧХ линейной части системы и обратная
отрицательная характеристика нелинейного элемента, представлена на рис. 2.6:
Рис. 2.6
Для определения устойчивости автоколебаний
воспользуемся следующей формулировкой: если точка соответствующая увеличенной
амплитуде по сравнению с точкой пересечения не охватывается частотной
характеристикой линейной части системы, то автоколебания устойчивые. Как видно
из рисунка 2.6 решение устойчиво, следовательно, в системе устанавливаются
автоколебания.
.1 Проверим результаты расчетов с помощью
структурного моделирования в программе MathLab.
Рис 2.7: Структурная схема
Переходный процесс при входном воздействии
равном 1 (рис 2.8):
автоматический управление нелинейный
гармонический
Рис. 2.8
Как видно из графика устанавливаются
автоколебания. Проверим влияние нелинейности на устойчивость системы.
.2 Исследуем влияние входного воздействия и
параметров нелинейности на динамику системы.
Увеличим входной сигнал до 100:
Рис. 2.9
Увеличим входной сигнал до 270
Рис. 2.10
Уменьшим входной сигнал до 50:
Увеличим насыщение до 200:
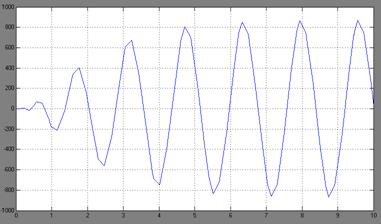
Рис. 2.11
Уменьшим насыщение до 25:
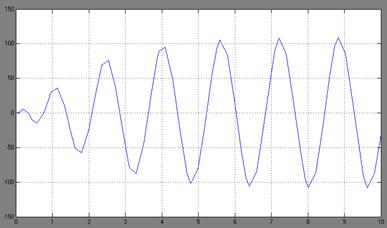
Рис. 2.12
Уменьшим насыщение до 10:
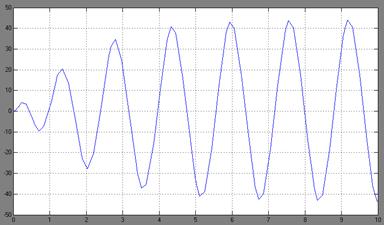
Рис. 2.13
Вывод:
Результатами моделирования не однозначно
подтвердили результаты расчетов:
) Автоколебания возникают в системе, а
изменение насыщения влияет на амплитуду колебаний.
2) При увеличении входного воздействия
изменяется величина выходного сигнала и система стремиться к устойчивому
состоянию.
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ:
1.
Сборник задач по теории автоматического регулирования и управления. Под ред.
В.А. Бесекерского, издание пятое, переработанное. - М.: Наука, 1978. - 512 с.
.
Теория автоматического управления. Ч. II.
Теория нелинейных и специальных систем автоматического управления. Под ред.
А.А.Воронова. Учеб. пособие для вузов. - М.: Высш. школа, 1977. - 288 с.
.
Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования:
учеб. пособие. − М.: Машиностроение, 1989. − 752 с.