Кинематический анализ кривошипно-ползунного механизма
Реферат
Курсовая работа содержит: 4 листа чертежей формата А 3, 1 лист чертежа
формата А 4, пояснительную записку на 25 листах формата А 4, включающую 3
рисунка, 2 таблицы, 5 источников информации.
Ключевые слова и словосочетания: механизм, кривошип, шатун, ползун,
звено, кинематическая пара, группа Ассура, план, фаза, угол, скорость,
ускорение. В первой и второй части курсовой работы разрабатываются
кривошипно-ползунный механизм и синез зубчатой передачи соответственно.
Объектом исследования является кривошипно-шатунный механизм.
Цель работы 1-й части курсовой работы:
- структурный анализ механизма;
- кинематический анализ кривошипно-ползунного механизма;
силовой анализ кривошипно-ползунного механизма.
Цель работы 2-й части курсовой работы:
синез зубчатой передачи.
Содержание
Введение
. Исходные данные и порядок выполнения 1-й части курсовой
работы
.1 Исходные данные для проведения исследования
кривошипно-ползунного механизма
.2 Порядок выполнения 1-й части курсовой работы
. Расчетная часть 1-й части курсовой работы
.1 Структурный анализ механизма
.2 Кинематический анализ механизма
.2.1 Кинематическая схема механизма
.2.2 Определение скоростей точек механизма
.2.3 Годограф скорости точки В
.2.4 Вычисление ускорений точек механизма
.3 Силовой анализ механизма
.3.1 Силовой расчет механизма для нулевого положения
механизма
.3.2 Силовой расчет механизма для третьего положения
механизма
. Синтез зубчатой передачи
Заключение
Список используемых источников
Введение
Исходные данные для расчета 1-й части курсовой работы представлены в
следующем виде:
- кинематическая
схема механизма (рисунок 1);
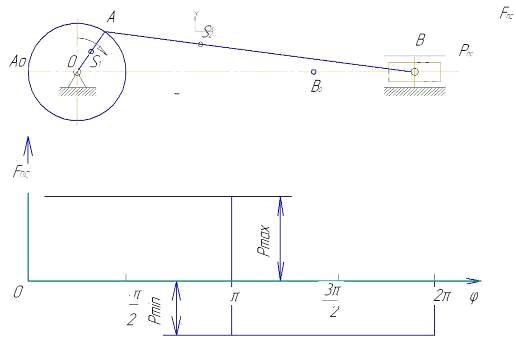
Рисунок 1 - Кинематическая схема механизма
длина кривошипа IOA - 0,125 м;
длина шатуна IАВ - 0,500 м;
расстояние от точки О до центра тяжести кривошипа IOS1 -
0,100;
расстояние от точки А до центра тяжести шатуна IAS2 - 0,200;
частота вращения кривошипа n - 150 мин -1;
масса неуравновешенной части кривошипа m1 - 12,5 кг;
масса шатуна m2 - 15,0 кг;
масса ползуна (плунжера) m3 - 15,0 кг;
сила полезных сопротивлений (прямой ход) F п. с. max - 3,0 кН;
сила полезных сопротивлений (обратный ход) F п. с. min - 0,30
кН;
момент инерции шатуна I2 - 0,55 кг*м2;
направление вращения кривошипа по часовой стрелке.
Исходные данные для расчета 2-й части курсовой работы представлены в
следующем виде:
- кинематическая
схема зубчатой передачи (рисунок 2);
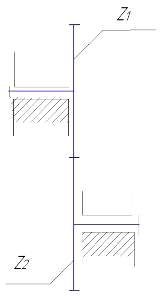
Рисунок 2 - Схема зубчатой передачи
коэффициент неравномерности хода δ - 0,09;
модуль зубчатых колёс Z1 и Z2 m - 12 мм;
числа зубьев колёс простой передачи Z1 -14; Z2 -
21;
межосевое расстояние простой передачи αw - 221,0 мм.
1.
Исходные данные и порядок выполнения 1-й части курсовой работы
.1
Исходные данные для проведения исследования кривошипно-ползунного механизма
К исходным данным относят:
кинематическая схема кривошипно-ползунного механизма;
- размеры звеньев
механизма;
- частоту и
направление вращения ведущего звена;
- силу полезного
сопротивления;
- масса частей
механизма.
.2 Порядок выполнения курсовой работы
Первую часть курсовой работы выполняют в следующем порядке:
- провести
структурный анализ механизма;
- вычертить схему
механизма в 8 положениях с указанием траекторий характерных точек: центров
шарниров и центров тяжести звеньев. За начальное принять нулевое положение
механизма (А 0). Нумерацию положений механизма через равные углы
поворота кривошипа проводить в направлении его вращения;
- построить для
каждого положения механизма из общего полюса планы скоростей всех характерных
точек и вычертить годографы скоростей;
- построить для
каждого положения механизма из общего полюса планы ускорений;
построить графики SВ = f(t) и VВ=
f(t) (1), αВ= f(t) пользуясь результатами
предыдущих построений;
построить диаграмму сил полезных сопротивлений PПС=
f(Ψ), где Ψ - текущий угол поворота кривошипа;
определить силы тяжести и инерции всех звеньев и приложить их в
соответствующие точки на кинематической схеме (для нулевого и промежуточного
положений);
разъединить механизм на структурную группу и ведущее звено. Вычертить их
отдельно и приложить к ним все силы, включая реакции в кинематических парах;
методом планов сил определить величины и направления реакций связей в
кинематических парах и уравновешивающую силу для двух выбранных положений
механизма.
2. Расчетная часть курсовой работы
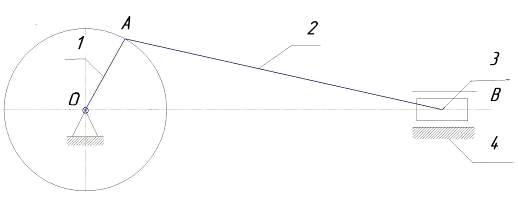
Рисунок 3 - Структурный анализ механизма
Обозначим порядковые номера звеньев, начиная с ведущего. Тогда подвижные
звенья будут обозначены: кривошип -1, шатун - 2, ползун - 3, а неподвижное
звено - 4 (направляющая ползуна и стойка кривошипа).
Кинематические пары обозначим буквами: стойка 4 и кривошип 1 образуют
вращательную пару А 5-го класса, кривошип 1 и шатун 2 вращательную пару В 5-го
класса, шатун 2 и ползун 3 -вращательную пару С 5-го класса, ползун 3 и
направляющие 4 поступательную пару С* 5-го класса.
Поскольку кривошипно-ползунный механизм является плоским, то степень
подвижности определяем по формуле Чебышева

При
анализе структуры механизма отсоединим структурную группу (группу Ассура) - диаду
2-го класса (звенья 2 и 3) от ведущего звена 1. Если такую отсоединенную
структурную группу присоединить к стойке. То она будет иметь нулевую
подвижность

При
этом степень подвижности начального механизма 1-го класса осталась неизменной

Поскольку класс механизма соответствует классу наивысшей группы, входящей
в его состав, то кривошипно-ползунный механизм будет относиться к механизмам
2-го класса.
.2 Кинематический анализ механизма
.2.1 Кинематическая схема механизма
Построим кинематическую схему кривошипно-ползунного механизма по заданным
размерам в масштабе 1:0,003125 на листе формата А3 в левой верхней четверти
листа при его горизонтальном расположении.
Построение ведем в следующей последовательности.
В точке О проводим горизонтальную и вертикальную осевые линии и строим
окружность радиусом ОА = 40 мм. Проводим горизонтальную ось - линию перемещения
ползуна (точка В),т.к. точки О и В лежат на одной оси.
Из точки О радиусом, равным длине (АВ-ОА), делаем засечку на
горизонтальной оси и получаем точку В - крайнее левое положение точки В.
Разбиваем траекторию точки А (окружность радиуса ОА) на 8 частей. За
положение А0 примем крайнее левое положение механизма (по условию).
Точки А1, А2, А3, ..., А8
откладываются равномерно от точки А0 в сторону вращения кривошипа.
Точка А8 совпадает с точкой А0. При нахождении точки А в
положении А4 точка В будет находится в положении Вп - крайнее
правое положение ползуна.
Из точек Аi отрезком АВ делаем соответствующие засечки на
отрезке ВлВп, дающие Вi положения ползуна.
.2.2 Определение скоростей точек механизма
Рассмотрим определение скоростей точек механизма для его 1-го положения.
Угловая скорость ведущего звена (кривошипа) ω1 и линейная скорость точки А-VА составляют


Векторное уравнение для скорости точки В, принадлежащей одновременно
шатуну и ползуну, имеет следующий вид:
где
 - является вектором переносной скорости точки В, a Vва
- вектором относительной скорости точки В.
- является вектором переносной скорости точки В, a Vва
- вектором относительной скорости точки В.
Вектор
скорости точки  известен как по величине, так и по направлению
(перпендикулярен звену ОА в направлении вращения этого звена).
известен как по величине, так и по направлению
(перпендикулярен звену ОА в направлении вращения этого звена).
Вектор
относительной скорости точки  по
величине не известен, однако известно его направление (перпендикулярно звену
АВ).
по
величине не известен, однако известно его направление (перпендикулярно звену
АВ).
Подчеркнем
в векторном уравнении вектора, известные по величине и направлению, 2-мя
линиями; по направлению - одной линией и решим это уравнение графически. Для
этого построим план скоростей механизма, для чего примем масштабный коэффициент
скорости:
 ;
; 
Из
произвольной точки, полюса плана скоростей (pv о), откладываем
окружность радиусом 49 мм. Из центра окружности к периметру откладываем
перпендикулярно звену OА в сторону направления его вращения отрезок (рvα). Из точки α проводим линию действия скорости  перпендикулярно
звену АВ. Из полюса pvо проводим линию действия скорости
перпендикулярно
звену АВ. Из полюса pvо проводим линию действия скорости  параллельно направляющим ползуна. Точку пересечения
линий отмечаем буквой b. Измеряем полученные отрезки, отображающие
соответственно вектора скоростей VBA и VB величину
которых находим с учетом масштаба построения плана скоростей: αb=35,2мм; pb=28,4мм
параллельно направляющим ползуна. Точку пересечения
линий отмечаем буквой b. Измеряем полученные отрезки, отображающие
соответственно вектора скоростей VBA и VB величину
которых находим с учетом масштаба построения плана скоростей: αb=35,2мм; pb=28,4мм


По
теореме подобия находим расположение точек S1 и S2 .
(pvα)=49мм, (αb)=35,2мм.


Определяем
скорость Vs2 шатуна АВ: ps2=38.29 мм

Угловая скорость 2-го звена составляет:

Угловая скорость точек S1 и S2 составляет


На
плане скоростей механизма № 0 кривошип ОА и шатун АВ лежат на одной прямой.
Ползун В находится в крайнем левом положении и его скорость равна 0, так же 0
будет равна скорость точки S2.
Аналогичные
расчеты скоростей точек механизма проводим в остальных семи положениях
механизма (таблица 1) и строим график изменения скорости ползуна VВ
от угла поворота кривошипа φ.
Необходимо помнить, что в положениях механизма 0 и 4 VВ = 0.
Диаграмма изменения скорости ползуна строится в своем масштабе μv и μφ.
Таблица 1 -
Скорости точек механизма
|
№
|
Va
|
vb
|
vba
|
vs2
|
w1
|
w2
|
ws1
|
ws2
|
|
1
|
1,963
|
1,14
|
1,4
|
1,53
|
-15,7
|
2,8
|
-15,68
|
2,82
|
|
2
|
1,963
|
1,96
|
0
|
-15,7
|
0
|
-15,68
|
1,96
|
|
3
|
1,963
|
1,63
|
1,4
|
1,7
|
-15,7
|
2,8
|
-15,68
|
2,82
|
|
4
|
1,963
|
0
|
1,96
|
1,18
|
-15,7
|
3,92
|
-15,68
|
3,92
|
|
5
|
1,963
|
1,63
|
1,4
|
1,7
|
-15,7
|
2,8
|
-15,68
|
2,82
|
|
6
|
1,963
|
1,96
|
0
|
1,96
|
-15,7
|
0
|
-15,68
|
1,96
|
|
7
|
1,963
|
1,14
|
1,4
|
1,53
|
-15,7
|
2,8
|
-15,68
|
2,82
|
|
8
|
1,963
|
0
|
1,96
|
1,18
|
-15,7
|
3,92
|
-15,68
|
3,92
|
2.2.3 Годограф скорости точки В
Для построения годографа скорости переносим векторы АВ параллельно самим
себе своими началами в одну точку p, называемую полюсом. Соединяем концы
векторов плавной кривой.
.2.4 Вычисление ускорений точек механизма
Рассмотрим определение ускорений точек механизма для его 1-го положения.
Ускорение точки А кривошипа при постоянной частоте его вращения равно
нормальному. Это ускорение направлено от точки А кривошипа к точке О и по
величине составляет:

Векторное
ускорение для определения ускорения точки B имеет вид:

Нормальное
относительное ускорение кинематической пары B направленное от точки B к A,
вычисляют по зависимости:

Аналогично
векторному уравнению скоростей подчеркнем известные по величине и направлению
ускорения двумя чертами. Тангенциальное относительное ускорение и ускорение
точки B известны только по направлениям, причем аtBA
перпендикулярно звену AB, ускорение аB - параллельно направляющим
ползуна. Эти ускорения подчеркиваются одной чертой.
Поскольку в уравнении имеется два неизвестных по величине ускорения, то
решим уравнение графически. Для этого построим план ускорений. Выберем масштаб
плана ускорений:
 ;
; 
Из точки (а), плана ускорений, параллельно звену АВ в направлении от
точки В к точке А на плане ускорений проводим вектор (an) длиной:

Из
точки (n) проводим линию перпендикулярную звену АВ. Из полюса плана ускорений
проводим линию параллельную направляющей звена В. Точка пересечения линий
проведенных из точки (n) и полюса (p) - точка (b), определяет конец вектора
(pb) ускорения аВ. Величина ускорения

Измеряем полученные отрезки pb=27,94; nb=35,2; ab=37,26.

Тангенциальная
составляющая ускорения

Угловое
ускорение звена АВ определяется из уравнения:

По
теореме подобия находим расположение точек S1 и S2:


Угловое
ускорение точки S1:

Угловое
ускорение точки S1: PaS2=39,51 следовательно

Аналогичные расчеты ускорений точек механизма проводим в остальных семи
положениях механизма (таблица 2).
Таблица 2 - Ускорения точек механизма
|
№
|
      
|
|
|
|
|
|
|
|
1
|
-30,81
|
3,92
|
21,12
|
24,65
|
23,7
|
16,76
|
42,24
|
|
2
|
-30,81
|
0
|
31,82
|
24,65
|
18,76
|
7,96
|
15,91
|
|
3
|
-30,81
|
1,4
|
21,43
|
24,65
|
25,43
|
21,85
|
42,86
|
|
4
|
-30,81
|
1,3
|
0
|
24,65
|
31,59
|
32,77
|
0
|
|
5
|
-30,81
|
1,4
|
21,43
|
24,65
|
25,43
|
21,85
|
42,86
|
|
6
|
-30,81
|
0
|
31,82
|
24,65
|
18,76
|
7,96
|
|
7
|
-30,81
|
3,92
|
21,12
|
24,65
|
23,7
|
16,76
|
42,24
|
|
8
|
-30,81
|
1,3
|
0
|
24,65
|
31,59
|
32,77
|
0
|
Строим графики зависимости перемещение-время, скорость-время, ускорение-время.B=f(t).Строим
две оси координат и на оси абсцисс откладываем отрезок L=160мм, изображающий
время одного полного оборота кривошипа 2 ОА в масштабе µt.



 B=f(t);
aB=f(t). Под графиком перемещений строим график скоростей и
ускорений ползуна В.
B=f(t);
aB=f(t). Под графиком перемещений строим график скоростей и
ускорений ползуна В.


Строим
диаграмму сил полезных сопротивлений PПС= f(Ψ), где Ψ - текущий угол поворота кривошипа.
Строим
оси координат и на оси абсцисс откладываем отрезок L=120мм, изображающий
половину полного оборота кривошипа ОА в масштабе µΨ.
На
оси ординат откладываем силы полезных сопротивлений
 .
.  .
.
Масса
ползуна В=15кг, ускорение  ползуна В берём из таблицы 2
ползуна В берём из таблицы 2

 ;
;  ;
; 





.3
Силовой анализ механизма
чертеж кинематический кривошипный годограф
2.3.1 Силовой расчет механизма для нулевого положения
механизма
а) Силы инерции, моменты пар сил инерции и силы тяжести звеньев
механизма




Зная
массы звеньев, определяем их силы тяжести из формулы
 .
g=9,8м/с2,
.
g=9,8м/с2,
получим:



б) Силовой расчет группы Ассура. Звенья 2-3
В
масштабе  вычерчивается группа Ассура, состоящая из шатуна АВ и
ползуна.
вычерчивается группа Ассура, состоящая из шатуна АВ и
ползуна.
Для
определения реакций в направляющей ползуна и вращательной кинематической паре
А, записывается векторное уравнение сил, действующих на звенья данной группы.
Здесь
составляющие  и
и  направлены
соответственно вдоль и перпендикулярно звену AВ, а давление направляющей на
ползун
направлены
соответственно вдоль и перпендикулярно звену AВ, а давление направляющей на
ползун  - перпендикулярно ходу ползуна.
- перпендикулярно ходу ползуна.
Модуль
реакции предварительно определяется аналитически из уравнения
моментов сил, действующих на звено AВ, относительно точки B:


Реакции
 и определяются
графическим решением вышеприведенного векторного уравнения сил. План сил
построен в масштабе:
и определяются
графическим решением вышеприведенного векторного уравнения сил. План сил
построен в масштабе:

в)
Силовой расчет исходного механизма
Кривошип и стойка, связанные вращательной кинематической парой,образуют
первичный механизм. Силовой расчет такого простого механизма заключается в
определении реакции во вращательной паре и в нахождении уравновешивающей силы.
Чтобы
первичный механизм находился в равновесии, необходимо к кривошипу приложить
уравновешивающий момент  или
уравновешивающую силу
или
уравновешивающую силу  .
.
Рассмотрим
случай, когда на кривошип действуют силы: реакция шатуна на кривошип F21
=−F12, сила тяжести кривошипа G1,пара сил инерции Fи 1,
реакция стойки на кривошип F01 .
Построим
расчетную схему первичного механизма. Для этого в масштабе вычертим схему
первичного механизма и приложим все силы.
Определим уравновешивающую силу из уравнения моментов сил:


Составим векторное уравнение равновесия кривошипа под действием
приложенных сил:

Реакцию
R01 определим в результате графического решения (построения плана сил)
векторного уравнения. Для этого в масштабе  построим
план сил. Замыкающим вектором плана является вектор R01, изображающий
реакцию стойки на кривошип.
построим
план сил. Замыкающим вектором плана является вектор R01, изображающий
реакцию стойки на кривошип.
г)
Определение уравновешивающей силы методом рычага Н. Жукоского.
Рычаг
Жуковского - это план скоростей механизма, повёрнутый на 900 вокруг
полюса, в соответствующие точки которого приложены все внешние силы, силы
инерции и уравновешивающая сила.
Построим
план скоростей механизма, повернутый на 900. ( ) примем равным 100 мм. Приложим к рычагу действующие
на механизм силы. Чтобы находился в равновесии, приложим к точке
) примем равным 100 мм. Приложим к рычагу действующие
на механизм силы. Чтобы находился в равновесии, приложим к точке  уравновешивающую силу и направим её
перпендикулярно .
уравновешивающую силу и направим её
перпендикулярно .
Запишем
уравнение равновесия рычага:

Тогда
силу  определим из выражения:
определим из выражения:


Сравнительная
оценка результатов:

.3.2 Силовой расчет механизма для третьего положения
механизма
а) Силы инерции, моменты пар сил инерции и силы тяжести звеньев механизма




Зная
массы звеньев, определяем их силы тяжести из формулы
 .
g=9,8м/с2, получим:
.
g=9,8м/с2, получим:



Заменим момент сил парой сил.
Пару сил Рu2, приложенную в точках А и В, вычислим по формуле:

б)
Силовой расчет группы Ассура. Звенья 2-3
В
масштабе  вычерчивается группа Ассура, состоящая из шатуна АВ и
ползуна.
вычерчивается группа Ассура, состоящая из шатуна АВ и
ползуна.
Для
определения реакций в направляющей ползуна и вращательной кинематической паре
А, записывается векторное уравнение сил, действующих на звенья данной группы.

Здесь
составляющие  и
и  направлены
соответственно вдоль и перпендикулярно звену AВ, а давление направляющей на
ползун
направлены
соответственно вдоль и перпендикулярно звену AВ, а давление направляющей на
ползун  - перпендикулярно ходу ползуна.
- перпендикулярно ходу ползуна.
Модуль
реакции  предварительно определяется аналитически из уравнения
моментов сил, действующих на звено AВ, относительно точки B:
предварительно определяется аналитически из уравнения
моментов сил, действующих на звено AВ, относительно точки B:



Реакции
и определяются
графическим решением вышеприведенного векторного уравнения сил. План сил
построен в масштабе 

После
измерения длин построенных векторов умножаем их на масштаб
Нормальная
реакция шатуна АВ: 
Реакция
в кинематической паре: 
Реакция
в поступательно кинематической паре: 
Реакция
во вращательной паре: 
в)
Силовой расчёт исходного механизма
В
масштабе на чертеже изображаем входное звено. На кривошип ОА
действуют: сила тяжести  , реакции
, реакции  и
и  , а также уравновешивающий момент
, а также уравновешивающий момент  .
.
Величина
определяется из уравнения моментов сил, действующих
на звено 1, относительно точки О.
 ,
,
где
H12-плечо силы F12 ; h12=33мм.
Откуда:
Реакция
во вращательной кинематической паре О определяется графическим построением. Для
этого в масштабе  строим план
сил. Замыкающим вектором является F01.
строим план
сил. Замыкающим вектором является F01.
Длина
этого вектора на плане сил составляет 41,7мм.

г)
Определение уравновешивающей силы методом рычага Н. Жуковского.
Построим
план скоростей механизма, повернутый на 900. ( ) примем равным 98 мм. Приложим к рычагу действующие
на механизм силы. Чтобы находился в равновесии, приложим к точке
) примем равным 98 мм. Приложим к рычагу действующие
на механизм силы. Чтобы находился в равновесии, приложим к точке  уравновешивающую силу и направим её
перпендикулярно .
уравновешивающую силу и направим её
перпендикулярно .
Запишем
уравнение равновесия рычага:

Силу
Fур определим из выражения:

Плечи
сил измеряем на чертеже и подставляем числовые значения в формулу:

Сравнительная
оценка результатов:

3. Синтез зубчатой передачи
1.
Делительное межосевое расстояние  определяется
по формуле:
определяется
по формуле:

2.
Угол  определяем по формуле (угол
определяем по формуле (угол  ):
):
3.
Применив формулу
рассчитаем
значение эвольвентных углов  и
и 

-подставляем
в радианах


4.
Определяем по формуле

.
Расчитаем 


.


 ;
; 
.
Воспринимаемое смещение y
 ;
; 
.
Коэффициент уравнительного смещения:


.Радиусы
делительной окружности:

 ;
;  .
.
.
Радиусы основных окружностей:
 ;
;  .
.
.
Радиусы окружностей впадин:

 ;
; 
.
Радиусы окружностей вершин:

 ;
; 
.
Радиусы начальных окружностей:

 ;
;  .
.
.
Найдем толщины зубьев по делительным окружностям:
 ;
; 
.
Толщины зубьев на окружностях вершин:


 ;
; 
 ;
;


 ;
;  ;
; 
.
Торцовый коэффициент перекрытия:

Допускаемое
значение,  следовательно, расчеты проведены, верно.
следовательно, расчеты проведены, верно.
Заключение
В процессе подготовки курсовой работы я ознакомился со структурным
исследованием механизма и изучил основы кинематического и кинетостатического
исследования кривошипно-ползунного механизма, для чего построил чертеж
кривошипно-ползунного механизма на листе формата А3. Также были подготовлены
чертежи плана скоростей, ускорений, сил и статистических моментов с последующим
вычислением их величин во всех восьми положениях кривошипа. По результатам
вычислений мною были построены графики перемещений, скоростей, ускорений и
диаграмма сил полезных сопротивлений.
В заключительной части курсовой работы мною был произведен расчет
зубчатой передачи. В целях самоконтроля было проведено сравнение полученных
показателей с предельно допустимыми значениями. Расчетные величины находятся в
пределах допустимых значений, что говорит о праильности расчетов.
Список
используемых источников
. Методические указания по выполнению курсовой работы
"Теория механизмов и машин" Хабаровск 2006.
. Иосилевич Г.Б. и др. "Прикладная механика"
(Москва Высшая школа 1989г.).
. Тимофеев Г.А. Курс лекций "Теория механизмов и
машин"(Москва "высшее образование" 2009г.).
. Гуляев К.И., Заморуев Г.Б. Зискандович В.А. Расчет
геометрии эвольвентной цилиндрической зубчатой передачи внешнего зайепления
(Ленинград 1975).
. Плахтин В.Д., Пантюшин Б.Д. "Теория механизмов и
машин". Кинематический и силовой анализплоских механизмов. (Москва МГОУ
2009).