Система регулирования скорости вращения асинхронного электродвигателя
Федеральное
агентство по образованию и науки РФ.
Нижегородский
Государственный
Технический
Университет
им.
Р. Е. Алексеева
Кафедра
«Электропривод и автоматизация промышленных установок»
КУРСОВАЯ
РАБОТА
по
дисциплине "Теория автоматического управления"
тема:
«Система регулирования скорости вращения асинхронного электродвигателя»
Руководитель
Мельников В. Л.
Студент
Задорожный О.Ю.
Нижний
Новгород 2015 год
Задание
скорость электродвигатель
передаточный
1. Определить принцип построения системы.
Составить функциональную схему и показать ее связь с принципиальной схемой.
Дать краткое описание работы системы при изменении задающего и возмущающего
воздействий.
. Записать дифференциальные уравнения звеньев в
операторной форме при нулевых начальных условиях. Найти передаточные функции
звеньев, составить структурную схему системы. Преобразовать эту схему так чтобы
получить единичную обратную связь.
. Определить по структурной схеме передаточную
функцию разомкнутой системы.
. Рассчитать и построить логарифмическую
амплитудно-частотную характеристику (ЛАЧХ) и логарифмическую фазовую частотную
характеристику (ЛФЧХ) разомкнутой системы. Проверить замкнутую систему на
устойчивость.
5. Определить передаточные функции
корректирующего устройства и инерционного фильтра на входе системы из условия
её настройки на модульный оптимум, скомпенсировав постоянную времени  . Выбрать
параметры элементов корректирующего устройства.
. Выбрать
параметры элементов корректирующего устройства.
. Составить структурную схему
скорректированной системы по передаточным функциям, полученным в пп. 2 и 5.
. Определить по структурной схеме
четыре передаточные функции замкнутой скорректированной системы: для
регулируемой величины и для ошибки по задающему напряжению и моменту
сопротивления.
. Рассчитать зависимость угловой
скорости от задающего напряжения и момента сопротивления в статическом режиме
работы. Определить значение задающего напряжения ( ),
обеспечивающего в статическом режиме угловую скорость
),
обеспечивающего в статическом режиме угловую скорость  .
.
. Рассчитать переходные процессы
изменения скорости в скорректированной системе при ступенчатом приложении
момента сопротивления  и задания
и задания  . Проверить
систему на соответствие требованиям задания.
. Проверить
систему на соответствие требованиям задания.
1. Исходные данные
Дано:дс= 0,04В·с/рад(коэффициент передачи
датчика скорости)
Тдс= 0,03с (постоянная времени датчика
скорости)у = 4,0(коэффициент передачи усилителя)п= 35Гц/В(коэффициент передачи
преобразователя)
Тп= 0,01с(постоянная времени преобразователя)
Рн= 1,1кВт (номинальная мощность двигателя)н=
8,0%(номинальное скольжение двигателя)= 3 (число пар полюсов)= 0,65Н·м·с2
(суммарный момент инерции двигателя и нагрузки)
Ωд= 115,2рад/с
(угловая скорость вращения вала двигателя)
Мн= 9,5Н·м (момент сопротивления)
2. Построение системы
Система предназначена для регулирования скорости
вращения рабочего органа машины (РО) и стабилизации ее на заданном уровне.
Система включает в себя (рис. 1) асинхронный электродвигатель (М), подключенный
к выходу преобразователя частоты (П), датчик скорости (ДС), задающий
потенциометр (ЗП) и усилитель (У).
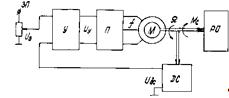
рис. 1
.1 Принцип построения системы
Система построена по принципу отрицательной
обратной связи (регулирование по отклонению). Управляющее воздействие на объект
формируется на основе измерения отклонения выходной координаты от заданного
значения.
.2 Функциональная схема
Функциональную схему получаем путем соединяя
элементов САУ между собой в соответствии с их назначением:
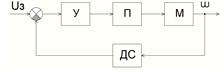
рис. 2
2.3 Описание работы системы
Описание работы системы при изменении задающего
и возмущающего воздействий:
Изменяя возмущающее воздействие (увеличивая или
уменьшая нагрузку), обороты на валу электродвигателя начинают изменяться,
датчик скорости, механически связанный с двигателем, аналогично изменяет свои
обороты. По причине пропорциональности напряжения на выходе датчика скорости
его оборотам, оно, изменяясь, само вносит коррективы во входное напряжение
усилителя, т.к. датчик скорости включен последовательно с задающим
потенциометром с помощью отрицательной обратной связи по напряжению, которая
изменяет значение напряжения ошибки и таким образом выравнивает обороты
двигателя.
Изменяя задающее воздействие (увеличивая или
уменьшая напряжение на задающем потенциометре), пропорционально изменяется
напряжение ошибки, и увеличивается или уменьшается напряжение на входе
усилителя. В свою очередь, усилитель изменяет значение напряжения на входе
преобразователя, который изменяет обороты двигателя. По причине изменения
оборотов двигателя, изменяются и обороты датчика скорости, и напряжение на его
выходе, что вносит исправления в значение напряжения ошибки, т. к. действует
отрицательная обратная связь - так обороты двигателя принимают новое значение.
3. Структурная схема
.1 Определение передаточных функций звеньев
Дифференциальные уравнения звеньев в операторной
форме при ННУ и полученные из них передаточные функции:
а) датчик скорости
 ,
,
 ,
,
 ,
,
 .
.
б) сравнивающее устройство (на входе усилителя)
 ,
,
 ,
,
 .
.
в) усилитель
 ,
,
 ,
,
 .
.
г) преобразователь частоты
 ,
,
 ,
,
 ,
,
 .
.
д) электродвигатель
 ,
,
 ,
,
 ,
,
.2 Структурная схема системы
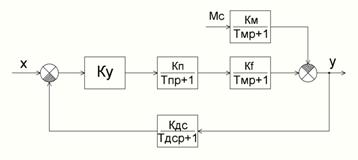
рис. 3
.3. Структурная схема системы с единичной ООС
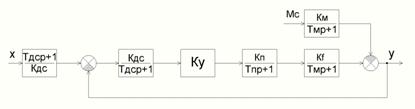
рис. 4
.4 Передаточная функция разомкнутой системы
Определим по структурной схеме передаточную
функцию разомкнутой системы:

Найдем коэффициенты передачи асинхронного
двигателя по частоте питающего напряжения (kf) и моменту сопротивления (kм):


Найдем постоянную времени электродвигателя (Тм):

Подставим значения в формулу (3.4.1) и
рассчитаем:

4. Логарифмические характеристики и проверка на
устойчивость
.1 Расчет и построение ЛАЧХ разомкнутой системы
По ПФ разомкнутой системы имеем три инерционных
звена первого порядка, сопрягающие частоты которых равны:

Строим график в котором НЧ асимптота параллельна
оси частот на уровне 20lg(11,7)=21,36 дБ, первая сопрягающая частота равна 1,72
Гц, после нее график спадает с наклоном -20 дБ/дек. до второй сопрягающей
частоты 33,3 Гц, далее кривая дает наклон -40 дБ/дек. до третьей сопрягающей
частоты равной 100 Гц, после которой наклон графика составляет -60 дБ/дек.
4.2 Расчет и построение ЛФЧХ
разомкнутой системы
Т.к. имеем три инерционных звена
первого порядка ЛФЧХ будет иметь вид: 
.3 Проверка замкнутой системы на
устойчивость
Имеем характеристический поленом
замкнутой системы:

По условию устойчивости САУ
определим критический коэффициент:

Т.к.  система устойчива.
система устойчива.
5. Настройка на модульный оптимум
.1 Передаточная функция регулятора
Передаточную функцию регулятора выбирают для
компенсации инерционности объекта (форсирующее звено у которого Tф=Тм) и
исключения ошибки (интегрирующее звено, причем Ти=aTμkkос,
где а=2,
Tμ= Tдс+Tп):

Передаточная функция регулятора:

Принципиальная схема ПИ-регулятора:
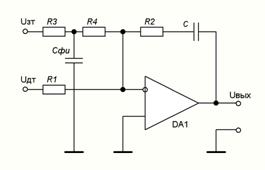
рис. 5
.2 Параметры элементов КУ
Найдем параметры элементов КУ:
Возьмем "C"равным 1 мкФ = 0,000001 Ф,
тогда




6. Структурная схема скорректированной САР
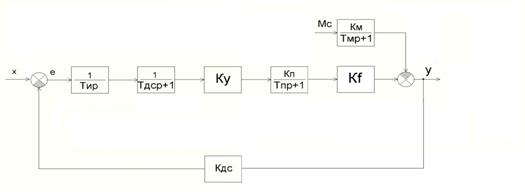
Рис.6
.1 Передаточные функции замкнутой
скорректированной системы
Примем =K
=K




.2 Расчет зависимости угловой скорости от
задающего напряжения и момента сопротивления в статическом режиме работы
В статике все переменные приравниваются к нулю:

Значение задающего напряжения (Uз)
обеспечивающее в статическом режиме угловую скорость Ωд:

6.3 Переходные процессы изменения скорости
Переходные процессы изменения скорости в скорректированной
системе при ступенчатом приложении момента сопротивления Мс=Мсн и задания
Uз=Uзн
Для расчета воспользуемся программой SamSim.
Структурная схема скорректированной САР:
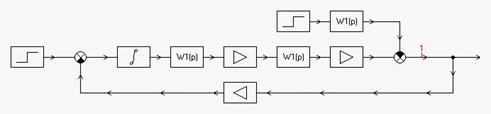
рис. 7
Подаем на вход ступенчатое воздействие величиной
4,608 при заданном моменте сопротивления равном0:
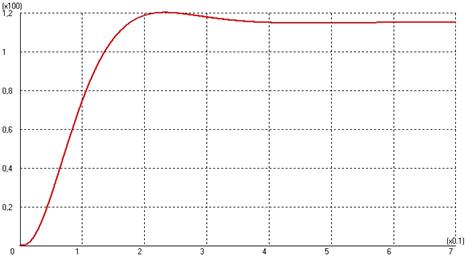
Переходный процесс при ступенчатом приложении
момента сопротивления.
На входе задания ступенчатое воздействие
величиной 0, при заданном моменте сопротивления равном 9,5:
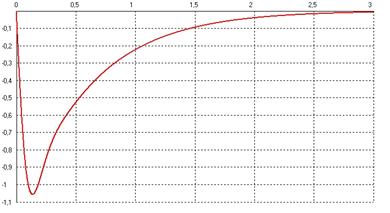
Данный график показывает, что при ступенчатом
изменении нагрузки на валу электродвигателя, сначала обороты его снижаются, а
затем САР выравнивает обороты двигателя до начального значения. Переходный
процесс при ступенчатом приложении момента сопротивления составляет около двух
секунд.
При анализе обоих графиков видно, что настройка
системы соответствует требованиям задания обеспечивая оптимальные настройки по
быстродействию и перерегулированию.