Расчет и проектирование системы автоматического регулирования
Федеральное
агентство по образованию и науке
ФГАОУ ВПО
"Уральский федеральный университет
имени первого
Президента России Б.Н. Ельцина"
Кафедра
теплофизики и информатики в металлургии
Расчетно-графическая
работа
Расчет и
проектирование системы автоматического регулирования
Студент Черепанова А.Ю.
Группа Х-320101
Преподаватель Матюхин В.И.
Екатеринбург,
2015
Оглавление
Введение
. Исходные
данные
2. Расчет системы автоматического
управления
2.1 Выбор
регулятора
.2
Определение параметров настройки регулятора
.3 Анализ
работы системы с ПИД-регулятором
. Анализ
частотных характеристик проектируемой системы
. Расчет
переходного процесса
. Оценка
качества регулирования. Построение переходного процесса по
вещественно-частотной характеристике (с применением типовых трапециевидных
характеристик)
. Схема
автоматизации управления
Вывод
Список
используемой литературы
Введение
Цель работы: рассчитать систему автоматического контроля и регулирования
уровня воды в котле.
1. Исходные
данные
Таблица 1 - Исходные данные
|
№ Вар
|
Регулируемая величина Х,
единица измерения, её предельное значение
|
Параметры модели объекта
|
Предельное значение
показателей регулирования
|
Возмущение
|
|
|
Коб
|
Тоб
|
τоб
|
Х1
|
∆Хст
|
τр
|
η
|
∆Z
|
|
32
|
Давление в агрегате
Р=250кПа
|
0,5
|
16
|
8
|
1,2
|
0,3
|
80
|
10
|
4
|
Коб - коэффициент передачи объекта;
Тоб - постоянная времени объекта, с;
τоб - время чистого запаздывания
объекта, с;
Х1 - максимальное динамическое отклонение величины Х(τ),
˚С;
∆Хст - статическая ошибка в конце регулирования, ˚С;
τр - время регулирования, с;
η - степень перерегулирования, %.
2. Расчет
системы автоматического управления
.1 Выбор
регулятора
Для решения задачи используется методика, основанная на использовании
графиков, таблиц и расчетных формул. С помощью справочных материалов находим
ориентировочные значения основных показателей регулирования (Х1, τр, ∆Хст) для четырех возможных
вариантов построения системы: с использованием П-, И-, ПИ-, ПИД- регулятора.
Выбор регулятора заключается в сравнении заданных показателей качества с
расчетными.
Основным условием при выборе закона регулирования и расчета настроек
регулятора является выполнение заданных требований по качеству регулирования:
X1, tр, Хст.
Для начала определим X1расч для каждого закона. В соответствии с
заданными значениями найдём отношение  , и по графикам [1,стр 34, рис. 6а,б]
определим динамический коэффициент регулирования
, и по графикам [1,стр 34, рис. 6а,б]
определим динамический коэффициент регулирования  для каждого закона.
для каждого закона.
Так как заданная степень перерегулирования η = 10, то нужно найти динамические
коэффициенты регулирования  для графиков с η = 0 и с η = 20 и с помощью аппроксимации найти для нужного нам перерегулирования по
формуле:
для графиков с η = 0 и с η = 20 и с помощью аппроксимации найти для нужного нам перерегулирования по
формуле:
Где, n - доля, которая составляет необходимое перерегулирование.
= =0,5
=0,5
И:  =0,845
=0,845
П: =0,655
=0,655
ПИ: =0,61
=0,61
ПИД: =0,47
=0,47
Рассчитываем Х1 и вносим в табл. 2.
Таблица 2 - Результаты определения вспомогательных коэффициентов
|
Параметр
|
Заданное значение
|
Закон регулирования
|
|
|
И
|
П
|
ПИ
|
ПИД
|
|
Х1
|
1,2
|
1,69
|
1,31
|
1,22
|
0,94
|
|
∆Хст
|
0,3
|
-
|
-
|
-
|
-
|
|
tр
|
80
|
176
|
36
|
72
|
44
|
Условие выбора закона - Х1 зад ≥Х1 расч. Подходит ПИД закон.
Далее проверяем ПИД закон на время регулирования tр по графикам
[1,стр.35, рис. 7 а, б]. Для этого необходимо по известной величине найти необходимый регулятор и найти
величину соотношения  и выразить tр.
и выразить tр.
==0,5
Аппроксимированием находим:
И:  =22
=22
П: =4,5
=4,5
ПИ: =9
=9
ПИД: =5,5
=5,5
Рассчитываем tр, данные заносим в таблицу 2.
Условие выбора закона - tр зад ≥ tр расч. Подходит ПИД закон.
.2
Определение параметров настройки регулятора
Определяем настройки ПИД-регулятора:


1) =0,236
=0,236
 .
.
 с;
с; 
2) с
с
3) с.
с.
.3 Анализ
работы системы с ПИД-регулятором
Расчет параметрической области устойчивости системы
Результаты расчета параметрической области устойчивости системы с
ПИД-регулятором представлены в таблице 3 и на рисунке 1.
Таблица 3 - Область устойчивости.
|
Тиз, с
|
К(р)
|
|
3,200
|
1,5704
|
|
6,400
|
8,0450
|
|
9,600
|
8,2076
|
|
12,800
|
8,0111
|
|
16,000
|
7,8726
|
|
19,200
|
7,7763
|
|
22,400
|
7,7070
|
|
25,600
|
7,6547
|
|
28,800
|
7,6138
|
|
32,000
|
7,5810
|
По данным таблицы 3 строим график, на котором определяем рабочую точку
(рисунок 1).
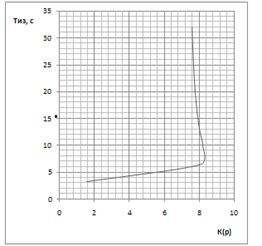
Рисунок 1 - Область устойчивости системы с ПИД-регулятором.
Координаты рабочей точки (0,000; 16000).
Координаты последней точки (2,150; 13,000). Система является устойчивой.
3. Анализ
частотных характеристик проектируемой системы
автоматический регулятор котёл управление
Таблица 4 - Амплитудно-фазовые характеристики
|
Частота, рад/с
|
АФХ
|
|
объекта
|
Регулятора
|
разомкнутая
|
Замкнутая
|
|
А(об)
|
Ф(об)
|
А(р)
|
Ф(р)
|
А
|
Ф
|
Вещ
|
Мним
|
|
0
|
0,50
|
0
|
max
|
-90
|
Max
|
-90
|
0
|
0
|
|
0,046
|
0,40
|
-57
|
6,2839
|
-47
|
2,53
|
-105
|
0,15
|
0,067
|
|
0,084
|
0,30
|
-92
|
4,5817
|
-22
|
1,36
|
-114
|
0,21
|
-0,084
|
|
0,130
|
0,22
|
-124
|
4,2509
|
1
|
0,92
|
-125
|
0,10
|
-0,223
|
|
0,182
|
0,16
|
-154
|
4,4007
|
15
|
0,72
|
-139
|
-0,08
|
-0,236
|
|
0,239
|
0,13
|
-185
|
4,8027
|
28
|
0,61
|
-157
|
-0,23
|
-0,101
|
|
0,301
|
0,10
|
-216
|
5,3750
|
38
|
0,55
|
-178
|
-0,18
|
0,127
|
|
0,368
|
0,08
|
-249
|
6,0772
|
46
|
0,51
|
-203
|
0,00
|
0,147
|
|
0,439
|
0,07
|
-283
|
6,8849
|
52
|
0,49
|
-231
|
0,06
|
0,067
|
|
0,514
|
0,06
|
-319
|
7,7818
|
57
|
0,47
|
-262
|
0,06
|
0,015
|
|
0,593
|
0,05
|
-356
|
8,7560
|
61
|
0,46
|
-295
|
0,04
|
-0,011
|
|
0,675
|
0,05
|
-394
|
9,7989
|
64
|
0,45
|
-330
|
0,02
|
-0,023
|
|
0,762
|
0,04
|
-443
|
10,9041
|
67
|
0,45
|
-367
|
0,01
|
-0,027
|
|
0,851
|
0,04
|
-476
|
12,0663
|
69
|
0,44
|
-407
|
-0,01
|
-0,027
|
|
0,944
|
0,03
|
-519
|
13,2815
|
71
|
0,44
|
-448
|
-0,02
|
-0,021
|
|
1,040
|
0,03
|
-563
|
14,5465
|
73
|
0,44
|
-490
|
-0,04
|
-0,001
|
= A*cos(рад(Ф)) вещественная ось= A*sin(рад(Ф)) мнимая ось
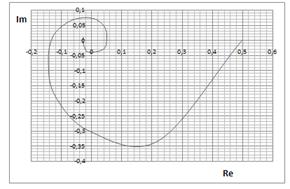
Рис.
2 Wоб( ) - АФХ объекта
) - АФХ объекта
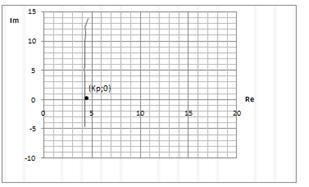
Рис.
3 Wр() - АФХ регулятора

Рис.
4 W() - АФХ условно-разомкнутой системы
Запасы устойчивости:
по модулю С = 0,45
по фазе φ = 55°
АФХ системы не охватывает критическую точку на плоскости переменного с
координатами (-1; j0). Следовательно, данная система автоматического
регулирования будет устойчивой.
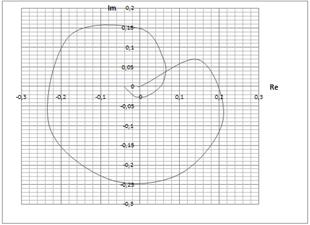
Рис. 5 АФХ замкнутой системы
Разомкнутая система является устойчивой. На основании этого делаем вывод
о том, что замкнутая система также будет устойчивой.
4. Расчет
переходного процесса
Таблица 5- Переходный процесс
|
Т, с
|
Х(Т)
|
|
0
|
0
|
|
9,600
|
0,2093
|
|
19,200
|
0,7957
|
|
28,800
|
0,3327
|
|
38,400
|
0,2142
|
|
48,000
|
0,0932
|
|
57,600
|
0,0405
|
|
67,200
|
0,0192
|
|
76,800
|
0,0067
|
|
86,400
|
0,0032
|
|
96,000
|
0,0010
|
|
105,600
|
0,0000
|
= 17,280; X1 = 0,82
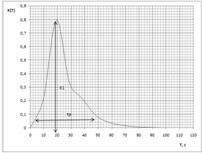
Рис. 6. Графическая зависимость графика переходного процесса
Таблица 6 - Параметры переходного процесса
|
Параметр
|
Заданное значение
|
|
х1
|
1,2
|
0,8
|
|
η
|
10
|
0
|
|
∆Хст
|
0,3
|
-
|
|
tр
|
80
|
44
|
Система удовлетворяет показателям качества по всем значениям.
5. Оценка
качества регулирования. Построение переходного процесса по
вещественно-частотной характеристике (с применением типовых трапециевидных
характеристик)
По таблице 4 строим вещественно-частотную характеристику замкнутой
системы регулирования.
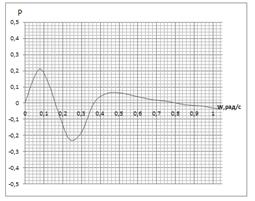
Рис. 7 - Вещественно-частотная характеристика замкнутой системы
регулирования
Рассмотрим первые два колебания. Используем метод трапеций.

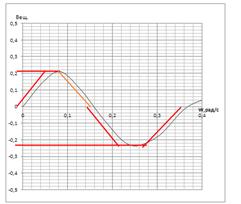
Рисунок 8 - Вещественно - частотная характеристика системы регулирования
В данном случае получилось 4 трапеции, характеристики которых занесем в
таблицу 8
Таблица 8 - Характеристики трапеций
|
№ трап.
|
Р
|
ωп
|
ωр
|
ϗ
|
|
1
|
0,21
|
0,16
|
0,093
|
0,6
|
|
2
|
0,21
|
0,062
|
0
|
0
|
|
3
|
-0,235
|
0,37
|
0,289
|
0,8
|
|
4
|
-0,235
|
0,228
|
0,159
|
0,7
|
По
справочнику находим значения h-функций и по выражениям  пересчитываем текущее время t и ординату x h-функции.
Записываем полученные данные в таблицу 9.
пересчитываем текущее время t и ординату x h-функции.
Записываем полученные данные в таблицу 9.
Таблица 9
|
Τ
|
1трапеция, ϗ=0,6
|
2 трапеция, ϗ=0
|
3 трапеция, ϗ=0,8
|
4 трапеция, ϗ=0,7
|
|
h
|
t
|
x
|
h
|
t
|
x
|
h
|
t
|
x
|
h
|
t
|
x
|
|
0
|
0
|
0,00
|
0,00
|
0
|
0,00
|
0,00
|
0
|
0,00
|
0,00
|
0
|
0,00
|
-0,00
|
|
0,5
|
0,255
|
3,13
|
0,05
|
0,138
|
8,06
|
0,03
|
0,282
|
1,35
|
-0,07
|
0,267
|
2,19
|
-0,06
|
|
1
|
0,49
|
6,25
|
0,10
|
0,31
|
16,13
|
0,07
|
0,547
|
2,70
|
-0,13
|
0,519
|
4,39
|
-0,12
|
|
1,5
|
0,706
|
9,38
|
0,15
|
0,449
|
24,19
|
0,09
|
0,776
|
4,05
|
-0,18
|
0,74
|
6,58
|
-0,17
|
|
2
|
0,878
|
12,50
|
0,18
|
0,572
|
32,26
|
0,12
|
0,956
|
5,41
|
-0,22
|
0,919
|
8,77
|
-0,22
|
|
2,5
|
1,01
|
15,63
|
0,21
|
0,674
|
40,32
|
0,14
|
1,084
|
6,76
|
-0,25
|
1,05
|
10,96
|
-0,25
|
|
3
|
1,1
|
18,75
|
0,23
|
0,755
|
48,39
|
0,16
|
1,154
|
8,11
|
-0,27
|
1,13
|
13,16
|
-0,27
|
|
3,5
|
1,145
|
21,88
|
0,24
|
0,783
|
56,45
|
0,16
|
1,171
|
9,46
|
-0,28
|
1,161
|
15,35
|
-0,27
|
|
4
|
1,158
|
25,00
|
0,24
|
0,857
|
64,52
|
0,18
|
1,156
|
10,81
|
-0,27
|
1,16
|
17,54
|
-0,27
|
|
4,5
|
1,134
|
28,13
|
0,24
|
0,883
|
72,58
|
0,19
|
1,111
|
12,16
|
-0,26
|
1,132
|
19,74
|
-0,27
|
|
5
|
1,107
|
31,25
|
0,23
|
0,896
|
80,65
|
0,19
|
1,053
|
13,51
|
-0,25
|
1,084
|
21,93
|
-0,25
|
|
5,5
|
1,07
|
34,38
|
0,22
|
0,9
|
88,71
|
0,19
|
0,994
|
14,86
|
-0,23
|
1,032
|
24,12
|
-0,24
|
|
6
|
1,021
|
37,50
|
0,21
|
0,904
|
96,77
|
0,19
|
0,949
|
16,22
|
-0,22
|
0,984
|
26,32
|
-0,23
|
|
6,5
|
0,982
|
40,63
|
0,21
|
0,904
|
104,84
|
0,19
|
0,920
|
17,57
|
-0,22
|
0,948
|
28,51
|
-0,22
|
|
7
|
0,957
|
43,75
|
0,20
|
0,904
|
112,90
|
0,19
|
0,911
|
18,92
|
-0,21
|
0,927
|
30,70
|
-0,22
|
|
7,5
|
0,944
|
46,88
|
0,20
|
0,907
|
120,97
|
0,19
|
0,920
|
20,27
|
-0,22
|
0,922
|
32,89
|
-0,22
|
|
8
|
0,941
|
50,00
|
0,20
|
0,91
|
129,03
|
0,19
|
0,944
|
21,62
|
-0,22
|
0,932
|
35,09
|
-0,22
|
|
8,5
|
0,944
|
53,13
|
0,20
|
0,918
|
137,10
|
0,19
|
0,974
|
22,97
|
-0,23
|
0,951
|
37,28
|
-0,22
|
|
9
|
0,961
|
56,25
|
0,20
|
0,924
|
145,16
|
0,19
|
1,006
|
24,32
|
-0,24
|
0,976
|
39,47
|
-0,23
|
|
9,5
|
0,98
|
59,38
|
0,21
|
0,932
|
153,23
|
0,20
|
1,033
|
25,68
|
-0,24
|
1
|
41,67
|
-0,24
|
|
10
|
0,993
|
62,50
|
0,21
|
0,939
|
161,29
|
0,20
|
1,049
|
27,03
|
-0,25
|
1,02
|
43,86
|
-0,24
|
|
10,5
|
1,007
|
65,63
|
0,21
|
0,946
|
169,35
|
0,20
|
1,054
|
28,38
|
-0,25
|
1,033
|
-0,24
|
|
11
|
1,014
|
68,75
|
0,21
|
0,947
|
177,42
|
0,20
|
1,048
|
29,73
|
-0,25
|
1,039
|
48,25
|
-0,24
|
|
11,5
|
1,017
|
71,88
|
0,21
|
0,949
|
185,48
|
0,20
|
1,034
|
31,08
|
-0,24
|
1,037
|
50,44
|
-0,24
|
|
12
|
1,019
|
75,00
|
0,21
|
0,95
|
193,55
|
0,20
|
1,015
|
32,43
|
-0,24
|
1,027
|
52,63
|
-0,24
|
|
12,5
|
1,018
|
78,13
|
0,21
|
0,95
|
201,61
|
0,20
|
0,995
|
33,78
|
-0,23
|
1,017
|
54,82
|
-0,24
|
|
13
|
1,014
|
81,25
|
0,21
|
0,95
|
209,68
|
0,20
|
0,980
|
35,14
|
-0,23
|
1,005
|
57,02
|
-0,24
|
|
13,5
|
1,01
|
84,38
|
0,21
|
0,95
|
217,74
|
0,20
|
0,968
|
36,49
|
-0,23
|
0,995
|
59,21
|
-0,23
|
|
14
|
1,008
|
87,50
|
0,21
|
0,952
|
225,81
|
0,20
|
0,965
|
37,84
|
-0,23
|
0,987
|
61,40
|
-0,23
|
|
14,5
|
1,005
|
90,63
|
0,21
|
0,954
|
233,87
|
0,20
|
0,969
|
39,19
|
-0,23
|
0,983
|
63,60
|
-0,23
|
|
15
|
1,002
|
93,75
|
0,21
|
0,956
|
241,94
|
0,20
|
0,978
|
40,54
|
-0,23
|
0,983
|
65,79
|
-0,23
|
|
15,5
|
1,001
|
96,88
|
0,21
|
0,959
|
250,00
|
0,20
|
0,991
|
41,89
|
-0,23
|
0,985
|
67,98
|
-0,23
|
|
16
|
1
|
100,00
|
0,21
|
0,961
|
258,06
|
0,20
|
1,003
|
43,24
|
-0,24
|
0,99
|
70,18
|
-0,23
|
|
16,5
|
1,001
|
103,13
|
0,21
|
0,964
|
266,13
|
0,20
|
1,014
|
44,59
|
-0,24
|
0,995
|
72,37
|
-0,23
|
|
17
|
0,999
|
106,25
|
0,21
|
0,965
|
274,19
|
0,20
|
1,020
|
45,95
|
-0,24
|
0,999
|
74,56
|
-0,23
|
|
17,5
|
0,997
|
109,38
|
0,21
|
0,966
|
282,26
|
0,20
|
1,023
|
47,30
|
-0,24
|
1,002
|
76,75
|
-0,24
|
|
18
|
0,997
|
112,50
|
0,21
|
0,966
|
290,32
|
0,20
|
1,020
|
48,65
|
-0,24
|
1,004
|
78,95
|
-0,24
|
|
18,5
|
0,995
|
115,63
|
0,21
|
0,966
|
298,39
|
0,20
|
1,014
|
50,00
|
-0,24
|
1,003
|
81,14
|
-0,24
|
|
19
|
0,993
|
118,75
|
0,21
|
0,967
|
306,45
|
0,20
|
1,006
|
51,35
|
-0,24
|
1,004
|
83,33
|
-0,24
|
|
19,5
|
0,992
|
121,88
|
0,21
|
0,967
|
314,52
|
0,20
|
0,998
|
52,70
|
-0,23
|
1,003
|
85,53
|
-0,24
|
|
20
|
0,992
|
125,00
|
0,21
|
0,967
|
322,58
|
0,20
|
0,991
|
54,05
|
-0,23
|
1,003
|
87,72
|
-0,24
|
|
20,5
|
0,994
|
128,13
|
0,21
|
0,968
|
330,65
|
0,20
|
0,986
|
55,41
|
-0,23
|
1,001
|
89,91
|
-0,24
|
|
21
|
0,997
|
131,25
|
0,21
|
0,968
|
338,71
|
0,20
|
0,983
|
56,76
|
-0,23
|
0,999
|
92,11
|
-0,23
|
|
21,5
|
1
|
134,38
|
0,21
|
0,969
|
346,77
|
0,20
|
0,986
|
58,11
|
-0,23
|
0,998
|
94,30
|
-0,23
|
|
22
|
1
|
137,50
|
0,21
|
0,971
|
354,84
|
0,20
|
0,991
|
59,46
|
-0,23
|
0,997
|
96,49
|
-0,23
|
|
22,5
|
1,004
|
140,63
|
0,21
|
0,973
|
362,90
|
0,20
|
0,998
|
60,81
|
-0,23
|
0,996
|
98,68
|
-0,23
|
|
23
|
1,006
|
143,75
|
0,21
|
0,974
|
370,97
|
0,20
|
1,002
|
62,16
|
-0,24
|
0,997
|
100,88
|
-0,23
|
|
23,5
|
1,007
|
146,88
|
0,21
|
0,975
|
379,03
|
0,20
|
1,007
|
63,51
|
-0,24
|
0,998
|
103,07
|
-0,23
|
|
24
|
1,008
|
150,00
|
0,21
|
0,975
|
387,10
|
0,20
|
1,008
|
64,86
|
-0,24
|
0,999
|
-0,23
|
|
24,5
|
1,006
|
153,13
|
0,21
|
0,975
|
395,16
|
0,20
|
1,008
|
66,22
|
-0,24
|
1
|
107,46
|
-0,24
|
|
25
|
1,004
|
156,25
|
0,21
|
0,975
|
403,23
|
0,20
|
1,005
|
67,57
|
-0,24
|
1,001
|
109,65
|
-0,24
|
|
25,5
|
1,002
|
159,38
|
0,21
|
0,975
|
411,29
|
0,20
|
1,004
|
68,92
|
-0,24
|
1,002
|
111,84
|
-0,24
|
|
26
|
1
|
162,50
|
0,21
|
0,975
|
419,35
|
0,20
|
1,002
|
70,27
|
-0,24
|
1,002
|
114,04
|
-0,24
|
По данным таблицы 9 строим графики составляющих переходного процесса с
учётом знаков - , и графически складываем их (рис 9.).
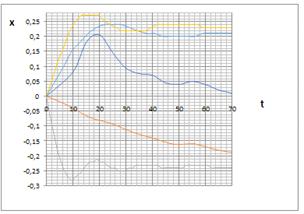
Рисунок 9 - График переходного процесса для каждой трапеции со своим
знаком
Суммарный график характеризует переходный процесс автоматического регулирования
при единичном скачкообразном возмущении:

Возмущение на входе системы равно 4, ординаты суммарной кривой
переходного процесса пересчитываем с учетом данной величины.
На рисунке 10 приведена кривая переходного процесса, построенная с учетом
величины входного возмущения

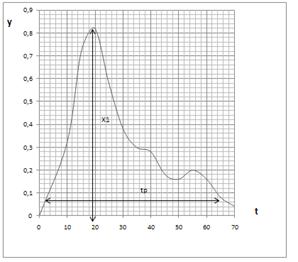
Рисунок 10 - Кривая переходного процесса.
С помощью графика переходного процесса (рис. 10) определим
Х1 - максимальное динамическое отклонение
τр - время регулирования
η - степень перерегулирования
Таблица 10 - Сравнение расчетных и заданных значений.
|
Параметр
|
Заданное значение
|
Расчетное значение
|
|
х1
|
1,2
|
0,82
|
|
η
|
10
|
0
|
|
∆Хст
|
0,3
|
-
|
|
tр
|
80
|
61,5
|
Сравнение
расчетных и заданных параметров показывает, что система автоматического
регулирования удовлетворяет показателям качества.
6. Схема
автоматизации управления
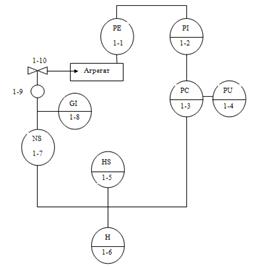
Рисунок 11 - Схема автоматизации по ГОСТ 21.404-85
Таблица 11.Спецификация приборов
|
№ п/п
|
Наименование приборов
|
Тип приборов
|
|
1-1
|
Первичный преобразователь
|
13ДД30
|
|
1-2
|
Вторичный показывающий
прибор
|
ПВ10.2П
|
|
1-3
|
Регулятор
|
ПРЗ.35-М1
|
|
1-4
|
Ручной задатчик
|
РЗД-12
|
|
1-5
|
Переключатель из ручного в
автоматический режим
|
ППУ
|
|
1-6
|
Кнопка для управления в
ручном режиме
|
РС290.М
|
|
1-7
|
Переключатель мощности
(блок переключения)
|
БП36
|
|
1-8
|
Указатель положения
исполнительного механизма
|
ПВ3.2
|
|
1-9
|
Исполнительный механизм
|
МИМ-200/25-ППХ
|
|
1-10
|
Регулирующий орган
|
25нж28бр
|
Описание схемы управления
Первичный преобразователь давления 1-1, установленного по месту,
воспринимает значение регулируемого параметра. Полученное значение поступает на
вторичный показывающий прибор 1-2, установленный на щите, где преобразуется в
сигнал измерительной информации. Заданный сигнал поступает на регулятор 1-3,
установленный на щите. Здесь происходит сравнение заданного сигнала с сигналом
вырабатываемым задатчиком 1-4 (с заданным значением регулируемого параметра).
Величина рассогласования, пропорциональная отклонению регулируемого параметра
от заданного значения поступает на вход переключателя мощности 1-7,
установленного по месту, который подает сигнал управляющего воздействия на
исполнительный механизм 1.9, регулирующий расход давления. Регулирующий орган
непосредственно воздействует на объект регулирования (агрегат), изменяя расход
давления.
В системе управления имеются также указатель положения исполнительного
механизма 1-8, переключатель из ручного режима в автоматический 1-5 и кнопка
для управления в ручном режиме 1-6.
Вывод
В данной расчетно-графической работе произведены расчет и проектирование
системы автоматического регулирования:
) В результате расчетов выбран
пропорционально-интегрально-дифференциальный закон регулирования. Этот закон
дает незначительное время регулирования и обеспечивает управление системой при
отсутствии статической ошибки. ПИД-регулятор пригоден для проектируемой
системы, так как полученные величины ∆Хст и Х1 не превышают заданные
допустимые значения ∆Хст и Х1.
) Произведён анализ частотных и фазовых характеристик системы и проведена
оценка устойчивости системы автоматического управления:
а) АФЧХ разомкнутой системы не охватывает критическую точку с
координатами (-1,0), следовательно, по критерию Найквиста система является
устойчивой;
б) с помощью амплитудно-фазовой частотной характеристики разомкнутой
системы были определены запас устойчивости системы по модулю С = 0,45 и по фазе
φ
= 55°. Полученные
значения входят в нужный предел, что подтверждает устойчивость данной системы
автоматического регулирования.
3) Произведен расчет переходного процесса. Система удовлетворяет
показателям качества по всем значениям.
4) Произведена оценка качества регулирования с применением трапециевидных
характеристик. Максимальное динамическое отклонение, время регулирования и
степень перерегулирования не превышают допустимые значения.
) Составлена схема автоматического управления расходом давления в агрегате
(приведена на рисунке 11).
Список
используемой литературы
1. Кутьин
В.Б. Основы автоматики и автоматизации производственных процессов. Свердловск:
Уральский политехнический институт им. С.М. Кирова, 1976. - 55 с.
. Суханов
Е.Л., Матюхин В.И. Расчет и проектирование систем автоматического
регулирования: Методическое пособие. Екатеринбург: УГТУ, 2001, 63 с.
. Кукаркин
А.С. Расчет систем автоматического регулирования. Свердловск: Уральский
политехнический институт им. С.М. Кирова, 1974. - с. 56-57.
. Суханов
Е.Л., Загайнов С.А. Исследование линейной системы автоматического
регулирования. Екатеринбург: УГТУ-УПИ, 1993. - 27 с.