|
Ф.И.О.
|
группа
|
  КДРТ1Т2Ти КДРТ1Т2Ти
|
|
|
|
|
|
|
Хасанов Р.Р.
|
БИ12-01
|
2
|
23
|
4
|
0,2*23+1=5,6
|
0,1*4=0,4
|
0,2*2=0,4
|
1.
Получение дискретной передаточной функции
Получить аналитически дискретную передаточную функцию
разомкнутой импульсной системы W*(z), Записать разностное уравнение разомкнутой импульсной САУ;
Для получения дискретной передаточной функции разомкнутой
импульсной системы по известной передаточной функции непрерывной части системы
воспользуемся следующей формулой:

Применим для вычисления zT-преобразования вычеты (вычисляем вычеты с помощью пределов, в
файле «Пункт1.xmcd»):
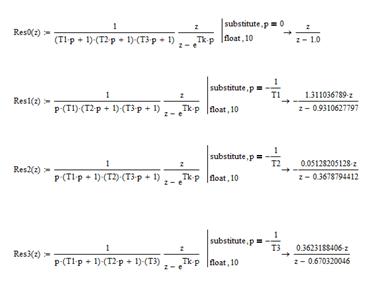
Сложим четыре вычета и умножим полученное выражение на  и получим выражение дискретной
передаточной функции разомкнутой системы.
и получим выражение дискретной
передаточной функции разомкнутой системы.
Преобразуем выражение к следующему виду:

Для записи разностного уравнения воспользуемся определением
дискретной передаточной функции и теоремой смещения.
Умножим левую и правую часть на z-3. В результате получим:

Нулевые начальные условия имеют вид:

[Пункт 1.xmcd]
2.
Модель импульсной САУ
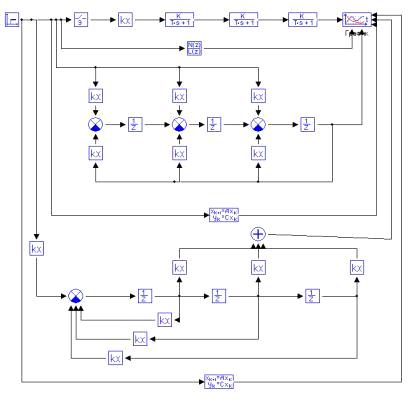
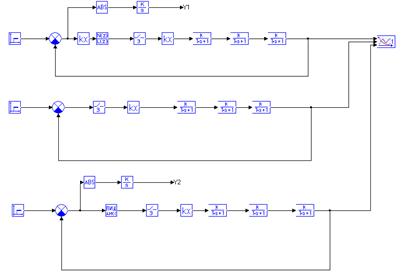
Составить пооператорную структурную схему разомкнутой
импульсной САУ. Получить модель импульсной САУ в векторно-матричной форме.
1 способ:
Для получения пооператорной структурной схемы выражаем
функцию y(z):

При  получим:
получим:

Итак, пооператорная структурная схема имеет вид:
2 способ:
Запишем модель импульсной системы в виде векторно-матричного
уравнения.





[Пункт 2.xmcd]
3.
Проверка модели
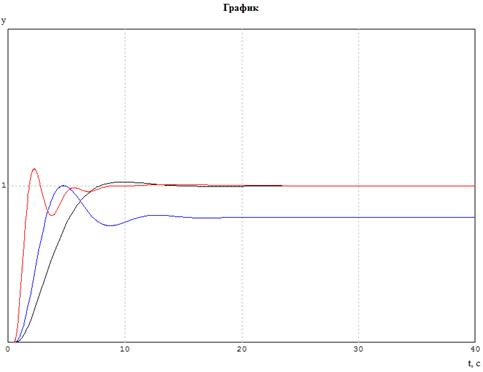
Проверить полученный в п.п. 1, 2 результат с помощью
моделирования на ЭВМ (пакет МВТУ) исходной системы, дискретной передаточной
функции W*(z), пооператорной
структурной схемы и векторно-матричного уравнения;
[Пункт 3.mrj]
[Пункт 3.mrj]
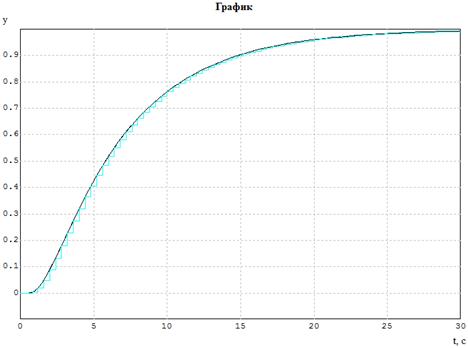
Вывод: все проводимые преобразования схем
приводят к эквивалентным схемам и на вход подаются одни и те же сигналы, то
графики всех выходных квантованных сигналов с различных схем совпадают, что и
представлено на графике.
.
Билинейной преобразование
Применяя билинейное преобразование, получить передаточную
функцию билинейно преобразованной системы W*(w).

В дискретной передаточной функции выполняем замену переменных  .
.
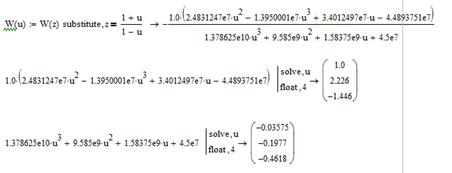
[Пункт 4.xmcd]

передаточная функция билинейно преобразованной системы.
Степень полинома числителя и знаменателя в полученной передаточной
функции равны 3 и соответствуют степени полинома знаменателя дискретной
передаточной функции системы (равна 3).
5.
Определение граничного коэффициента
При заданном периоде квантования определить граничный
коэффициент передачи непрерывной части, используя критерии устойчивости
непрерывных систем.
Билинейно преобразованная система является аналогом непрерывной
системы. Используем критерий Гурвица непрерывной системы для билинейно
преобразованной системы.

передаточная функция билинейно преобразованной системы.
Характеристический полином замкнутой системы с единичной
отрицательной обратной связью равен сумме полиномов числителя и знаменателя
передаточной функции разомкнутой системы.
Определитель Гурвица формируется из коэффициентов
характеристического полинома замкнутой системы.
 , где
, где
Для того чтобы система находилась на колебательной границе
устойчивости необходимо и достаточно, чтобы последний определитель Гурвица был
равен 0, а все остальные определители Гурвица были больше 0.
Используем необходимое условие устойчивости:

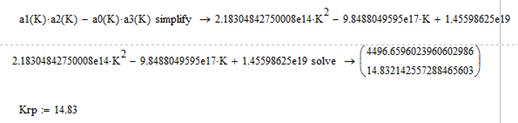
[Пункт 5.xmcd]
Соберем в МВТУ следующую схему:

[Пункт 5.mrj]
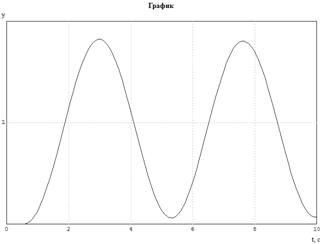
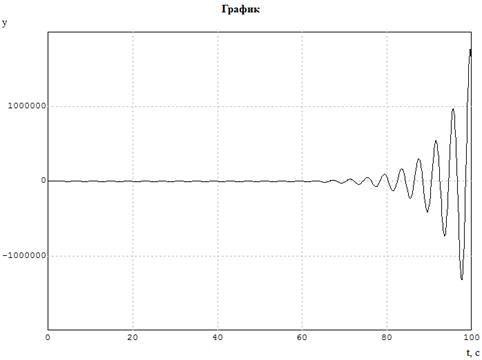
При граничном значении коэффициента передачи  график зависимости выходной координаты от
времени имеет вид:
график зависимости выходной координаты от
времени имеет вид:
6.
ЛАЧХ и ЛФЧХ
дискретный автоматический управление импульсный
Построить логарифмическую частотную характеристику
разомкнутой системы функции абсолютной псевдочастоты v, подтвердить результаты
п. 5.
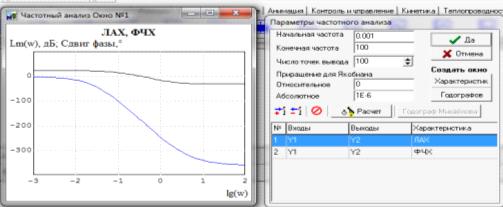
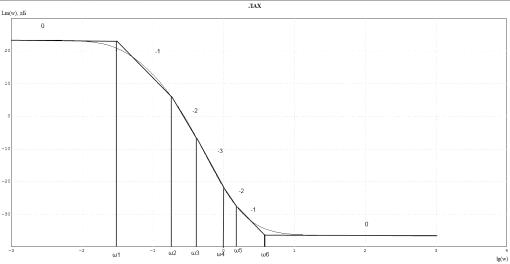
Построим ЛАХ и ЛФЧХ и подтвердим значение граничного
коэффициента передачи (аналитическое выражение для ЛАХ и ЛФЧХ).
Билинейно преобразованная система является аналогом
непрерывной системы.
Передаточная функция разомкнутой импульсной билинейно
преобразованной системы имеет вид:
Для построения ЛАХ в программе МВТУ собираем схему с
граничным значением коэффициента Kгр=14.832:
Выбираем в меню Моделирование->Начать, Анализ
-> Частотный анализ.
[Пункт 6.mrj]
[Пункт 6.png]
7.
Проверка устойчивости
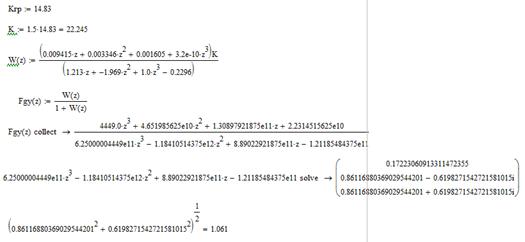
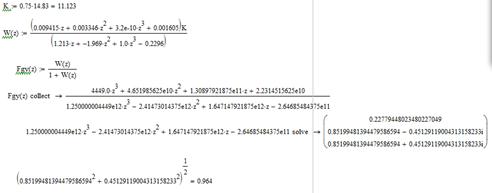
Для коэффициента K1=1,5*Kгр и K2=0,75*Kгр
а) вычислить корни характеристического уравнения замкнутой
системы; по полученным корням оценить устойчивость; определить степень устойчивости
замкнутой системы;
б) подтвердить результаты по критерию Джури;
в) подтвердить результаты моделированием на ЭВМ (пакет МВТУ)
a) Система не устойчива, если хотя бы один из корней
характеристического уравнения по модулю больше нуля.
Система неустойчива
Система устойчива
[Пункт 7.xmcd]
б) Критерий Джури
Свободный член, получаемый в результате деления исходного
полинома на сопряженный, должен быть по модулю меньше 1 на всех n шагах
деления, в этом случае система n-го порядка устойчива.
При K1 = 14.83*1.5 система неустойчива
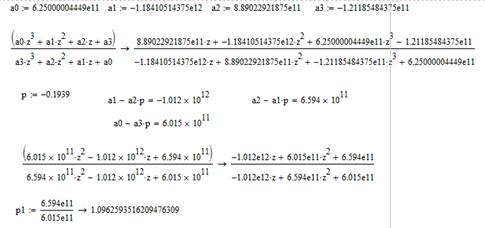
1.096 > 1 Система неустойчива
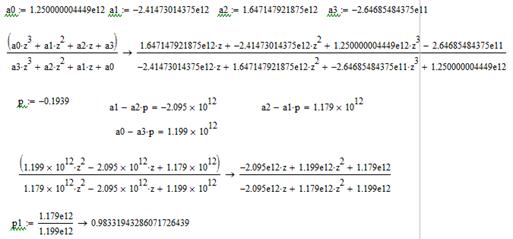
.98 > 1 Система устойчива
[Пункт 7.xmcd]
в)
[Пункт 7_1.mrj]
[Пункт 7_2.mrj]
8.
Определение ошибки
Определить ошибку воспроизведения системой задающего
воздействия
(t)=At+B;
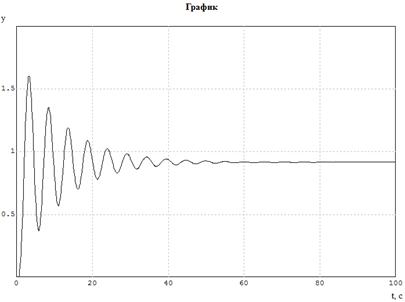
9.
Переходной процесс
Разложим полученное выражение в ряд Лорана делением числителя
на знаменатель, получим значения переходной характеристики в моменты времени,
кратные периоду квантования. Используем стороннюю программу [ряд лорана.xlsm]
Вывод: коэффициент ошибки С0=0,1 показывает, что
система воспроизводит задающее воздействие с ошибкой, равной С0.
Время регулирования - это время достижения регулируемой
величины 5% зоны от своего требуемого значения.
Время регулирования:
tр=39.4 c. (определяется из списка в МВТУ и собственной
программы).
Затухание:
 ,
,
где y1, y2 - относительное превышение первого и второго максимумов
соответственно.

Перерегулирование:
 , где
, где
 - максимальное значение регулируемой координаты
- максимальное значение регулируемой координаты
 - установившееся значение регулируемой координаты.
- установившееся значение регулируемой координаты.
10.
Влияние периода квантования
Оценить влияние периода квантования на время регулирования и
перерегулирование замкнутой системы.

[Пункт 10.mrj]
Таблица переходных процессов
|
Тк, с
|
Tp, с
|
D, %
|
δ%
|
|
0,3
|
28.5
|
44
|
72
|
|
0,35
|
34.2
|
40
|
74
|
|
0,4
|
39.4
|
37
|
77
|
|
0,45
|
45
|
32
|
81
|
|
0,5
|
55,9
|
28
|
83
|
Выводы: Чем меньше период квантования, тем меньше
время регулирования и перерегулирование замкнутой системы. Чем больше период
квантования, тем больше время регулирования и перерегулирование замкнутой
системы.
11.
Синтез параметров регулятора
Выполнить синтез параметров регулятора  из условия минимума среднеквадратической
ошибки. Построить кривую переходного процесса при оптимальных настройках
регулятора и вычислить коэффициенты ошибок. Сравнить результаты с п. 9
из условия минимума среднеквадратической
ошибки. Построить кривую переходного процесса при оптимальных настройках
регулятора и вычислить коэффициенты ошибок. Сравнить результаты с п. 9
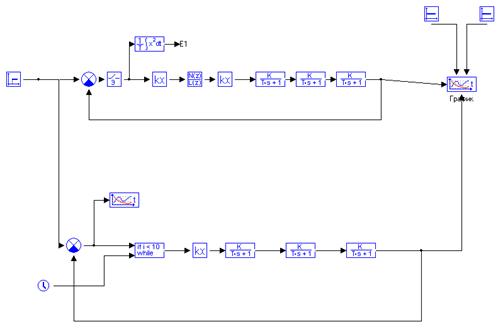
Схема для моделирования в МВТУ:
[Пункт 11.mrj]
Результаты оптимизации:
[Пункт 11.mrj]
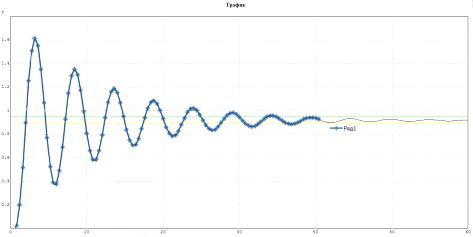
Время регулирования:
tр=5,6 c. (определяется из списка в МВТУ и собственной
программы).
Затухание:
 ,
,
где y1, y2 - относительное превышение первого и второго максимумов
соответственно.
Перерегулирование:
 , где
, где
- максимальное значение регулируемой координаты
- установившееся значение регулируемой координаты.
Вычисление коэффициентов ошибок:






Вывод: при оптимальных настройках регулятора
система воспроизводит входное воздействие без ошибки, время регулирования
уменьшилось, затухание увеличилось, перерегулирование уменьшилось, т.е.
регулируемый процесс улучшился по всем параметрам по сравнению с п. 9.
12.
Синтез регулятора
Синтезировать регулятор состояния из условия конечной
длительности переходного процесса в импульсной САУ. Построить кривую
переходного процесса. Сравнить результаты с п. 9, 11.
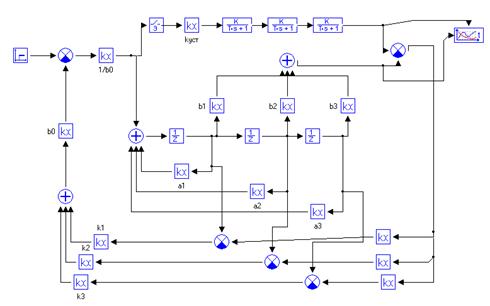
Представим данное выражение при помощи структурной схемы:






Схема регулирования в МВТУ и ее график выглядят следующим
образом:
[Пункт 12.mrj]
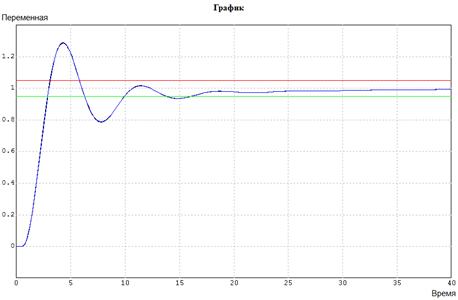
Зависимость выходной координаты объекта управления от времени:
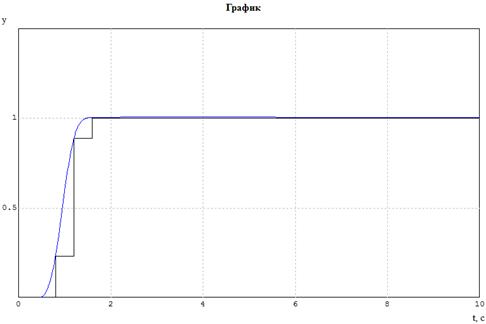
Вывод: данный регулятор обеспечивает конечную
длительность переходного процесса в импульсной САУ, равную 1.6 с., что является
гораздо лучшим результатом по сравнению с временем регулирования,
обеспечиваемым регуляторами, построенными в п. 9 и п. 11. Кроме того, процесс
не является колебательным. Значит, регулируемый процесс улучшился по всем
параметрам.
13.
Реализация КУ
Включим последовательно корректирующее устройство в систему и
преобразуем полученную передаточную функцию разомкнутой системы к передаточной
функции замкнутой системы.
Запрограммируем передаточную функцию замкнутой системы в
программе МВТУ и оптимизируем настройки регулятора, входящие в передаточную
функцию, с помощью параметрической оптимизации.
[Пункт 13.mrj]
Текст программы:
input e, t_in;
var t, x, y, i, xp, yp;= t_in;
abs (t-Tk*i)<=0.001 then= x;= e;= y;=
yp+k*x-a*k*xp;= i+1;;
y;
[Пункт13.mrj]
Вывод: Корректирующее устройство было реализовано
двумя способами: с использованием стандартных звеньев и с помощью написанной
программы для ЦВУ. Результаты параметрической оптимизации, полученные в п. 11 и
п. 13, совпадают.
Заключение
Исследовали и синтезировали цифровую систему автоматического
управления. Были получены дискретная передаточная функция, пооператорная
структурная схема, модель САУ в векторно-матричной форме, построены
характеристики, проведена проверка на устойчивость, выполнен синтез регулятора.
В результате было значительно уменьшено время перерегулирования системы и т.д.
Список
используемых источников
1.
Кочетков В.П. Основы теории управления. - М.: Феникс, 2012. - 406 с
.
Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования. -
М.: Наука, 1975. - 768 с.
.
Болтянский В.Г. Математические методы оптимального управления. - М.: Наука,
1969. - 408 с.
.
Тюкин В.Н. Теория управления: Конспект лекций. Часть 1. Обыкновенные линейные
системы
управления. - 2-е изд., испр. и доп. - Вологда: ВоГТУ, 2000. - 200 с
.
Тюкин В.Н. Теория управления: Часть 2. Особые линейные и нелинейные
системы:
Конспект лекций. - Вологда: ВоГТУ, 2000. - 128 с.:
.
Мизрах Е.А. Теория автоматического управления: Линейные непрерывные системы:
Учеб. пособие, издание второе, Красноярск: САА, 1997.