Проектирование и расчет систем автоматического регулирования частоты вращения электродвигателя постоянного тока привода вращающегося механизма
Аннотация
Объектом исследования является система
автоматическая регулирования частоты вращения двигателя постоянного тока.
Целью курсового проекта является - приобретение
и закрепление практических навыков для использования современного программного
обеспечения для анализа и синтеза относительно простых систем на примере
исследования замкнутой системы автоматического регулирования, стабилизации,
оценки устойчивости оптимизации и коррекции типичной линейной САР с
использованием в основном программного обеспечения пакета моделирования системы
VisSim.
В процессе работы проводились экспериментальные
исследования стабилизации, оценки устойчивости оптимизации и коррекции САР ЧВ
ДПТ путем изменения коэффициентов усиления усилителя и постоянной времени ОСН а
также в введения в контур управления П - регулятора и ПИ - регулятора.
В результате исследования получили устойчивую,
оптимизированную и скорректированную САР ЧВ ДПТ путем изменения коэффициентов
усиления усилителя и постоянной времени СОН, а так же введения в контур
управления ПИ - регулятора.
Содержание
Введение
Исходные данные
. Определение передаточных функций
элементов САР ЧВ ДПТ
. Моделирование структурной схемы
САР
.1 Моделирование структурной схемы
замкнутой САР
.2 Моделирование структурной схемы
замкнутой САР
. Оценка устойчивости разомкнутой
контура САР
. Стабилизация разомкнутого контура
САР
.1 Изменение коэффициента усиления
усилителя
.2 Изменение постоянной времени
контура ОСН
.3 Изменение коэффициента усиления
усилителя и постоянной
времени контура обратной связи по
напряжению
. Оценка устойчивости замкнутой САР
. Коррекция замкнутой САР
.1 Введение в контур управления П -
регулятора
.2 Введение в контур управления ПИ -
регулятора
. Оценка качества САР
. Определение области устойчивости
разомкнутой САР
Заключение
Библиографический список
Введение
Элементы применения автоматических, т.е.
работающих без непосредственного участия человека, устройств наблюдаются еще в
ёглубокой древности. Они создавались на основе интуиции. Методом проб и ошибок
отбирались наиболее приспособленные к практике устройства. Прежде всего если
речь идет об управлении, то имеется объект управления, т.е. некий механизм,
агрегат или устройство, некий технологический, энергетический или транспортный
процесс, желаемое поведение или протекание которого должно быть обеспечено.
Поведение объекта управления, результат его действия определяется некоторыми
показателями. Чаще всего ими являются значения каких- то физических величин,
которые называют выходными величинами или выходными координатами объекта
управления. В реальных условиях на каждое устройство или процесс многочисленные
воздействия оказывает внешняя среда. Все воздействия, с точки зрения их влияния
на действие объекта, на его выходные величины, разделяются на две принципиально
отличительные группы. Некоторые из воздействий обеспечивают желаемое изменение
поведения объекта, достижение поставленных целей. Такие воздействия называют
управляющими, при их отсутствии задача управления вообще не имеет решения.
Другие воздействия, напротив, мешают достижению цели, и изменить их, как
правило, невозможно. Такие воздействия называют возмущающими (или просто
возмущениями). Задача управления, по существу, заключается в формировании
такого закона изменения управляющих воздействий, при котором достигается
желаемое поведение объекта независимо от наличия возмущений. Сложная и
разносторонняя задача управления включает более узкую задачу регулирования,
которую главным образом и будем рассматривать в дальнейшем. Задача
регулирования заключается в поддержании выходных величин объекта равными (или
пропорциональными) некоторым эталонным функциям времени- задающим воздействиям.
Последние могут быть постоянными или изменяющимися как по заданному, так и по
заранее неизвестному закону. Объект управления может принадлежать как к неживой
природе, в частности, быть техническим устройством, так и к живой природе
(коллектив людей). В свою очередь, само управление также может осуществляться
как человеком (пилот управляет самолетом), так и техническим устройством
(самолетом управляет автопилот). Управление, осуществляемое без участия
человека, называется автоматическим управлением. Предметом настоящей дисциплины
является теория автоматического управления техническими объектами. Общая теория
управления, охватывающая как неживую, так и живую природу, является предметом
науки кибернетики. Теория автоматического управления- часть кибернетики. Для
осуществления автоматического управления создается система, состоящая из
объекта управления и управляющего устройства, или регулятора. Такая система
соответственно называется системой автоматического управления. Впервые с
необходимостью построения регуляторов столкнулись создатели высокоточных
механизмов, в первую очередь - часов. Крупный вклад в теорию регулирования
внесен Н.Е. Жуковским, автором труда «О прочности движения» и первого учебника
«Теория регулирования хода машин»(1909). В первые десятилетия XX
в. Теория автоматического управления, вышедшем из рамок прикладной механики,
формируется как общетехническая дисциплина. В этот период появляется целый ряд
работ, рассматривающих приложение теории и распространяющих ее выводы на самые
разнообразные технические процессы: на регулирование электрических машин и
систем, двигателей внутреннего сгорания; тепловых и паросиловых устройств;
турбин; различных производственных процессов. Исключительно интенсивным и
многогранным было развитие теории автоматического управления в послевоенный
период. Это обусловлено в первую очередь развитием военной и космической
техники, бурным прогрессом вычислительной техники и электроники. В настоящее
время буквально все окружающие нас технические устройства содержат в своем
составе то или иное число автоматических регуляторов. Ограничиваясь для примера
бытовой электроникой, перечислим лишь некоторые характерные термины:
автоматическая регулировка усиления; автоподстройка частоты; стабилизация
напряжения и т. д. Системы автоматического управления (САУ) различной
физической природы и совершенно различного функционального назначения могут
иметь одинаковое математическое описание, то есть описываться одинаковыми
уравнениями (отличаться будут лишь размерности величин). Но в САУ с одинаковым
математическим описанием и процессы при управлении будут протекать одинаково,
хотя действовать в них будут различные физические величины. В результате
приложения конечного по величине воздействия САУ должна перейти из одного
равновесного состояния в другое (в противном случае она будет неустойчивой).
Переход из одного состояние в новое осуществляется за некоторое определенное
время, на протяжении которого величина (или величины), характеризующая
состояние САУ, изменяется по какому - либо закону. Переход САУ в новое
равновесное состояние осуществляется с какой-либо точностью. Необходимо
отметить, что составление математического описания отдельных элементов или
систем в целом может быть произведено лишь на основе четкого понимания
физических процессов, протекающих в этих объектах и алгоритмах их
функционирования. Поэтому задача получения исходного математического описания
относится к предмету специальных дисциплин, в которых эти элементы изучаются. В
теории автоматического управления указанные выше вопросы изучения САУ решаются
с помощью специальных методов с использованием математического описания. Отсюда
следует, что возможность успешного освоения настоящей дисциплины основывается,
в первую очередь, на знании высшей математики и, с учетом профиля специальности
«Промышленная электроника», основ теории цепей. Совокупность элементов любой
физической природы и процессы, наблюдаемые в них, обладающие свойствами
целеустремленности, называется системой. Наличие цели управления
(целеустремленности) является фундаментальным признаком системы. Цели природных
систем чаще всего неизвестны, но цели искусственных систем известны всегда.
Исходные данные
Тема курсового проекта - анализ системы
автоматического регулирования частоты вращения вала двигателя постоянного тока
(САР ЧВ ДПТ)
Исходные данные: функциональная схема САР ЧВ ДПТ
и параметры ее элементов показана на рис.1.
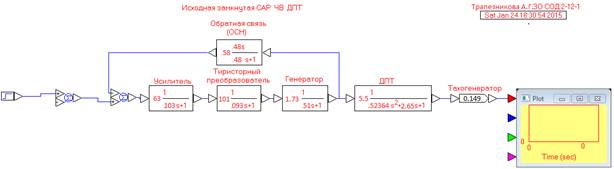
Рис. 1 Функциональная схема САР ЧВ ДПТ
(Вариант-43)
1. Определение передаточных функций элементов
САР частоты вращения вала двигателя постоянного тока
Передаточные функции элементов определяются с
целью построения структурно-алгоритмической модели САР ЧВ ДПТ посредством
вычисления параметров передаточных функций по заданным формулам и подстановки
их в формулы передаточных функций.
В данном курсовом проекте и формулы передаточных
функций элементов, и формулы для вычисления их параметров заданы, и поэтому
требуют только подтверждения.
Определение передаточных функций элементов. Для
построения структурно-алгоритмической схемы необходимо определить передаточные
функции каждого звена САР. В курсовом проекте заданием определены модели элементов
САР и общий вид передаточных функций. В данном разделе производится расчет уже
определенных заданием передаточных функций моделей элементов САР
Усилитель (У) моделируется как инерционное звено
первого порядка (апериодическое звено) с передаточной функцией
где  - коэффициент усилителя,
- коэффициент усилителя, 
 - постоянная времени усилителя,
- постоянная времени усилителя, 
При N=43


Тиристорный преобразователь (ТП) моделируется
как инерционное звено первого порядка (апериодическое звено) с передаточной
функцией
где  - коэффициент усиления тиристорного
преобразователя,
- коэффициент усиления тиристорного
преобразователя,

Ттп - постоянная времени тиристорного
преобразователя ,

При N=43


Генератор (Г) - инерционное звено первого
порядка (апериодическое звено) с передаточной функцией.
где  - коэффициент усиления генератора,
- коэффициент усиления генератора, 
 - постоянная времени генератора,
- постоянная времени генератора, 
При N=43


Гибкая обратная связь по напряжения (ОСН) -
моделируется как инерционное (дифференцирующее) звено.
где  - коэффициент обратной связи,
- коэффициент обратной связи, 
 - постоянная времени,
- постоянная времени, 
При N=43


Тахогенератор (ТГ) - усилительное
(пропорциональное) звено. Входящая величина n - частота
вращения вала, об/сек, выходная  , В. Передаточный коэффициент - это
отношение выходной величины к входной.
, В. Передаточный коэффициент - это
отношение выходной величины к входной.
где  - коэффициент усиления
тахогенератора,
- коэффициент усиления
тахогенератора,
При N=43


Двигатель постоянного тока (ДПТ) с независимым
возбуждением является инерционным звеном второго порядка (колебательное звено).
Его передаточная функция по каналу управления определяется по выражению

а по каналу возмущения (по управляющему
воздействию напряжению генератора)

где  - коэффициент усиления двигателя,
- коэффициент усиления двигателя,
 - коэффициент усиления двигателя,
- коэффициент усиления двигателя,
 - постоянная времени якоря,
- постоянная времени якоря,
 - постоянная времени колебательного
звена
- постоянная времени колебательного
звена 
При N=43





Передаточная функция  определяет влияние момента
сопротивления на валу двигателя на его частоту вращения. Момент сопротивления
на валу прикладывается той машиной, которую приводит в движение двигатель.
определяет влияние момента
сопротивления на валу двигателя на его частоту вращения. Момент сопротивления
на валу прикладывается той машиной, которую приводит в движение двигатель.
Совокупность передаточных функций элементов и
функциональной схемы позволяет построить структурно-алгоритмическую модель САР,
а также аналитическую модель, представляющую собой передаточную функцию всей
САР. В рассматриваемом примере используется аналитический инструмент -
программа VisSim, что
избавляет от необходимости проведения громоздких выкладок по получению
аналитической модели САР.
2. Моделирование структурной схемы САР
САР представляет собой замкнутый контур главной
обратной связи, который осуществляет управление по отклонению. В контуре
имеется гибкая местная обратная связь, которая предназначена для стабилизации
САР, способствует тому, чтобы САР была достаточно устойчивой. Наличие обратных
связей в САР свидетельствует о том, что система может быть и неустойчивой,
поэтому анализ САР должен включать оценку ее устойчивости и, при необходимости,
выбор мер и средств по ее стабилизации.
Объект управления - двигатель постоянного тока,
управляемая величина - частота вращения вала ДПТ. Система содержит контуры
обратной связи. САР может быть неустойчивой. Следует отметить, что предлагаемой
схеме фактически изменять можно только параметры усилителя и звена местной
обратной связи. Эти элементы введены в схему как раз для того чтобы обеспечить
возможность ее коррекции. Не исключено, что параметры звена обратной связи по
напряжению (ОСН) заданы неудачно и потребуют существенной коррекции.
Работа САР ЧВ ДПТ в статике. В статике входные и
выходные сигналы САР постоянны. На первый левый сумматор контура главной
обратной связи, его сравнивающее устройство, подается задающая величина и
величина с выхода тахогенератора, пропорциональная частоте вращения вала,
усиливается усилителем тиристорным преобразователем и генератором в результате
чего получается входной, управляющий сигнал ДПТ ( двигателя постоянного тока,
объекта управления), т.е. напряжения на якоре. Вследствие наличия этого
напряжения вал двигателя вращается. Поскольку произведение коэффициентов
усиления усилителя, тиристорного преобразователя и генератора велико, то
получить некоторое конкретное управляющее напряжение на якоре двигателя можно
только в том случае если разностный сигнал мал. Это значит что частота вращения
вала с некоторой точностью пропорциональна заданию, звено боратной связи
инерционно-дифференцирующее поскольку обратная связь по напряжению гибкая, и
поэтому не влияет на работу САР в статике.
Следовательно, САР выполняет свои функции
обеспечивает слежение в статике, поддерживая частоту вращения вала
пропорциональной заданию.
Работа САР ЧВ ДПТ в динамике. Изменение задания
в первый момент времени приводит к соответствующему росту отклонения, поскольку
звенья перед объектом и сам объект обладают инерционностью и поэтому частота
вращения вала не может измениться мгновенно. Изменение отклонения, будучи
усиленным усилителем, тиристорным преобразователем и генератором с учетом их
инерционности приводит к постепенному изменению управляющей величины -
напряжение на якоре, которое плавно изменяет частоту вращения вала так, что
ошибка слежения т.е. отклонение устремляется к нулю. Обратная связь по
напряжению стабилизирует САР и повышает ее быстродействие. Таким образом,
осуществляется слежение.
Изменение возмущения, момента на валу двигателя,
приводит к изменению частоты вращения, которое, вследствие наличия главной
обратной связи приводит к соответствующему изменению отклонения. Это изменение
отклонения усиливается и тем самым изменяет величину напряжения на якоре так,
что отклонение частоты, вызванное изменением возмущения, компенсируется. Таким
образом, осуществляется стабилизация частоты вращения вала двигателя.
Итак САР ЧВ ДПТ обеспечивает как стабилизацию
так и слежение.
Начинаем моделирование структурной схемы САР в VisSim
 - Генератор ступенчатой единичной
функции 10(t) задается командой
- Генератор ступенчатой единичной
функции 10(t) задается командой 
 - Сумматор задается командой
- Сумматор задается командой  . Чтобы задать отрицательную
обратную связь в сумматоре нужно подвести курсор мыши ко входу зажать клавишу Ctrl и кликнуть
правой кнопкой мыши. Сумматор - устройство, преобразующее информационные
сигналы (аналоговые или цифровые) в сигнал, эквивалентный сумме этих сигналов
. Чтобы задать отрицательную
обратную связь в сумматоре нужно подвести курсор мыши ко входу зажать клавишу Ctrl и кликнуть
правой кнопкой мыши. Сумматор - устройство, преобразующее информационные
сигналы (аналоговые или цифровые) в сигнал, эквивалентный сумме этих сигналов
 - Усилитель задается командой.
- Усилитель задается командой. 
Усилитель - элемент системы
управления (или регистрации и контроля), предназначенный для усиления входного
сигнала
<https://ru.wikipedia.org/wiki/%D0%A1%D0%B8%D0%B3%D0%BD%D0%B0%D0%BB> до
уровня, достаточного для срабатывания исполнительного механизма
<https://ru.wikipedia.org/wiki/%D0%98%D1%81%D0%BF%D0%BE%D0%BB%D0%BD%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%BC%D0%B5%D1%85%D0%B0%D0%BD%D0%B8%D0%B7%D0%BC>
(или регистрирующих элементов <https://ru.wikipedia.org/wiki/%D0%A0%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B8%D1%80%D1%83%D1%8E%D1%89%D0%B5%D0%B5_%D1%83%D1%81%D1%82%D1%80%D0%BE%D0%B9%D1%81%D1%82%D0%B2%D0%BE>),
за счёт энергии
<https://ru.wikipedia.org/wiki/%D0%AD%D0%BD%D0%B5%D1%80%D0%B3%D0%B8%D1%8F>
вспомогательного источника
<https://ru.wikipedia.org/wiki/%D0%98%D1%81%D1%82%D0%BE%D1%87%D0%BD%D0%B8%D0%BA_%D0%BF%D0%B8%D1%82%D0%B0%D0%BD%D0%B8%D1%8F>,
или за счёт уменьшения других характеристик входного сигнала (под термином
«сигнал» здесь и далее понимается любое явление (или процесс), характеристики
которого необходимо увеличить).
 - Тиристорный преобразователь
задается командой
- Тиристорный преобразователь
задается командой
 .
.
Тиристорным преобразователем постоянного тока
(ТП) является устройство для преобразования переменного тока в постоянный с
регулированием по заданному закону выходных параметров (тока и напряжения).
Тиристорные преобразователи предназначаются для питания якорных цепей
двигателей и их обмоток возбуждения.
Тиристорные преобразователи состоят из следующих
основных узлов:
трансформатора или токоограничивающего реактора
на стороне переменного тока,
выпрямительных блоков,
сглаживающих реакторов,
элементов системы управления, защиты и
сигнализации.
 - Генератор задается командой
- Генератор задается командой 
Генератор (от лат. generator - производитель) -
устройство, аппарат или машина: - производящие какие-либо продукты (генератор
ацетиленовый, ледогенератор,парогенератор,газогенератор), - вырабатывающие
электрическую энергию (электрический генератор) (генератор электромашинный,
паротурбинный, гидротурбинный, ламповый, импульсный, радиосигналов и др. )
преобразующие один вид энергии в другой
(генератор ультразвуковых колебаний) .
вырабатывающие сигнал (в произвольной
энергетической форме) с опредеделенными математическими свойствами (генератор
синусоидальных колебаний, генератор импульсов, генератор случайной величины и
т. д.). Генератор - это прибор, генерирующий электрические колебания малой
мощности для испытания и настройки радиотехнических устройств и применяющийся главным
образом в качестве источника переменного тока широкого диапазона частот.
Основные требования к генератору: стабильность (постоянство) частоты и
амплитуды генерируемых колебаний, постоянство формы выходных сигналов во всём
диапазоне частот, тщательное экранирование прибора для исключения воздействия
его внутренних электромагнитных полей на настраиваемую (проверяемую) аппаратуру
(сигналы с Г. и. чаще всего подаются по коаксиальному или экранированному
кабелю, а также по волноводу).
 - Обратная связь задается командой
- Обратная связь задается командой  . Чтобы развернуть блок transferfunction, который
моделирует функцию ОСН нужно каждый изэтих блоков выделить и выбрать команду
мен.
. Чтобы развернуть блок transferfunction, который
моделирует функцию ОСН нужно каждый изэтих блоков выделить и выбрать команду
мен.
Обратная связь в технике
<https://ru.wikipedia.org/wiki/%D0%A2%D0%B5%D1%85%D0%BD%D0%B8%D0%BA%D0%B0>
- это процесс, приводящий к тому, что результат функционирования какой-либо
системы влияет на параметры, от которых зависит функционирование этой системы.
Другими словами, на вход системы подаётся сигнал, пропорциональный
<https://ru.wikipedia.org/wiki/%D0%9F%D1%80%D0%BE%D0%BF%D0%BE%D1%80%D1%86%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D1%81%D1%82%D1%8C>
её выходному сигналу (или, в общем случае, являющийся функцией
<https://ru.wikipedia.org/wiki/%D0%A4%D1%83%D0%BD%D0%BA%D1%86%D0%B8%D1%8F_%28%D0%BC%D0%B0%D1%82%D0%B5%D0%BC%D0%B0%D1%82%D0%B8%D0%BA%D0%B0%29>
этого сигнала). Часто это делается преднамеренно, чтобы повлиять на динамику
функционирования системы.
Различают положительную
<https://ru.wikipedia.org/wiki/%D0%9F%D0%BE%D0%BB%D0%BE%D0%B6%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F_%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%BD%D0%B0%D1%8F_%D1%81%D0%B2%D1%8F%D0%B7%D1%8C>
и отрицательную
<https://ru.wikipedia.org/wiki/%D0%9E%D1%82%D1%80%D0%B8%D1%86%D0%B0%D1%82%D0%B5%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F_%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%BD%D0%B0%D1%8F_%D1%81%D0%B2%D1%8F%D0%B7%D1%8C>
обратную связь.
Отрицательная обратная связь
изменяет входной сигнал таким образом, чтобы противодействовать изменению
выходного сигнала. Это делает систему более устойчивой к случайному изменению
параметров. Положительная обратная связь, наоборот, усиливает изменение выходного
сигнала. Системы с сильной положительной обратной связью проявляют тенденцию к
неустойчивости, в них могут возникать незатухающие колебания
<https://ru.wikipedia.org/wiki/%D0%9A%D0%BE%D0%BB%D0%B5%D0%B1%D0%B0%D0%BD%D0%B8%D1%8F>,
то есть система становится генератором.
 - тахогенератор задается командой
- тахогенератор задается командой . Чтобы развернуть блок gain, который
моделирует функцию тахогенератора нужно каждый из этих блоков выделить и
выбрать команду мен.
. Чтобы развернуть блок gain, который
моделирует функцию тахогенератора нужно каждый из этих блоков выделить и
выбрать команду мен.
Тахогенератор (от др.-греч.
<https://ru.wikipedia.org/wiki/%D0%94%D1%80%D0%B5%D0%B2%D0%BD%D0%B5%D0%B3%D1%80%D0%B5%D1%87%D0%B5%D1%81%D0%BA%D0%B8%D0%B9_%D1%8F%D0%B7%D1%8B%D0%BA>
τάχος- быстрейший, скорость и генератор) -
измерительный генератор
<https://ru.wikipedia.org/wiki/%D0%98%D0%B7%D0%BC%D0%B5%D1%80%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%B3%D0%B5%D0%BD%D0%B5%D1%80%D0%B0%D1%82%D0%BE%D1%80>
постоянного
<https://ru.wikipedia.org/wiki/%D0%9F%D0%BE%D1%81%D1%82%D0%BE%D1%8F%D0%BD%D0%BD%D1%8B%D0%B9_%D1%82%D0%BE%D0%BA>
или переменного
<https://ru.wikipedia.org/wiki/%D0%9F%D0%B5%D1%80%D0%B5%D0%BC%D0%B5%D0%BD%D0%BD%D1%8B%D0%B9_%D1%82%D0%BE%D0%BA>
тока, предназначенный для преобразования мгновенного значения частоты (угловой
скорости
<https://ru.wikipedia.org/wiki/%D0%A3%D0%B3%D0%BB%D0%BE%D0%B2%D0%B0%D1%8F_%D1%81%D0%BA%D0%BE%D1%80%D0%BE%D1%81%D1%82%D1%8C>)
вращения вала в пропорциональный электрический сигнал. Величина (ЭДС
<https://ru.wikipedia.org/wiki/%D0%AD%D0%BB%D0%B5%D0%BA%D1%82%D1%80%D0%BE%D0%B4%D0%B2%D0%B8%D0%B6%D1%83%D1%89%D0%B0%D1%8F_%D1%81%D0%B8%D0%BB%D0%B0>),
а в некоторых типах ТГ и частота, сигнала прямо пропорциональны частоте вращения.
Сгенерированный сигнал подаётся для непосредственного отображения на специально
проградуированный вольтметр
<https://ru.wikipedia.org/wiki/%D0%92%D0%BE%D0%BB%D1%8C%D1%82%D0%BC%D0%B5%D1%82%D1%80>
(тахометр <https://ru.wikipedia.org/wiki/%D0%A2%D0%B0%D1%85%D0%BE%D0%BC%D0%B5%D1%82%D1%80>),
либо на вход автоматических устройств, отслеживающих частоту вращения.
 - Двигатель постоянного тока
задается командой
- Двигатель постоянного тока
задается командой 
Электродвигатель постоянного тока
(ДПТ)- электрическая машина постоянного тока
<https://ru.wikipedia.org/wiki/%D0%9C%D0%B0%D1%88%D0%B8%D0%BD%D0%B0_%D0%BF%D0%BE%D1%81%D1%82%D0%BE%D1%8F%D0%BD%D0%BD%D0%BE%D0%B3%D0%BE_%D1%82%D0%BE%D0%BA%D0%B0>,
преобразующая электрическую энергию постоянного тока
<https://ru.wikipedia.org/wiki/%D0%9F%D0%BE%D1%81%D1%82%D0%BE%D1%8F%D0%BD%D0%BD%D1%8B%D0%B9_%D1%82%D0%BE%D0%BA>
в механическую энергию.
 - Осциллограф задается командой
- Осциллограф задается командой 
Осциллограф (лат.
<https://ru.wikipedia.org/wiki/%D0%9B%D0%B0%D1%82%D0%B8%D0%BD%D1%81%D0%BA%D0%B8%D0%B9_%D1%8F%D0%B7%D1%8B%D0%BA>oscillo- качаюсь +
греч. <https://ru.wikipedia.org/wiki/%D0%93%D1%80%D0%B5%D1%87%D0%B5%D1%81%D0%BA%D0%B8%D0%B9_%D1%8F%D0%B7%D1%8B%D0%BA>
γραφω - пишу) -
прибор, предназначенный для исследования (наблюдения
<https://ru.wikipedia.org/wiki/%D0%9D%D0%B0%D0%B1%D0%BB%D1%8E%D0%B4%D0%B5%D0%BD%D0%B8%D0%B5>,
записи <https://ru.wikipedia.org/wiki/%D0%97%D0%B0%D0%BF%D0%B8%D1%81%D1%8C>;
измерения
<https://ru.wikipedia.org/wiki/%D0%98%D0%B7%D0%BC%D0%B5%D1%80%D0%B5%D0%BD%D0%B8%D0%B5>)
амплитудных
<https://ru.wikipedia.org/wiki/%D0%90%D0%BC%D0%BF%D0%BB%D0%B8%D1%82%D1%83%D0%B4%D0%B0>
и временных
<https://ru.wikipedia.org/wiki/%D0%92%D1%80%D0%B5%D0%BC%D1%8F> параметров
электрического сигнала
<https://ru.wikipedia.org/wiki/%D0%AD%D0%BB%D0%B5%D0%BA%D1%82%D1%80%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%B8%D0%B9_%D1%81%D0%B8%D0%B3%D0%BD%D0%B0%D0%BB>,
подаваемого на его вход, либо непосредственно на экране.
Чтобы увеличить длительность
моделирования необходимо выполнить команду меню .
.
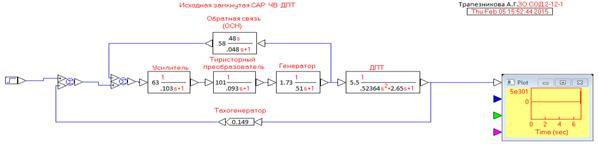
.1 Моделирование структурной схемы замкнутой САР
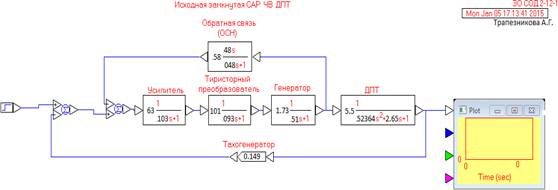
Рис. 2. - Исходно замкнутая САР
Моделируем исходную замкнутую САР подключая
последовательно ступенчатый генератор, 2 сумматора, усилитель, тиристорный
преобразователь, генератор и ДПТ, далее на выход двигателя постоянного тока
подключаем вход тахогенератора, а выход подключаем на отрицательный вход
первого сумматора, далее на выход генератора подключаем вход контура обратной
связи (ОСН), а выход подключаем на отрицательный вход второго сумматора,
вследствие чего получаем исходную замкнутую САР рис.2.
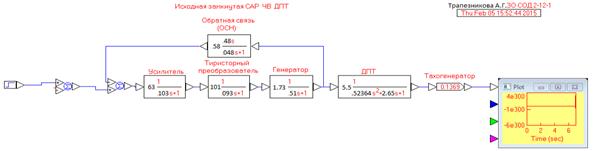
2.2 Моделирование структурной схемы разомкнутой
САР
Моделируем исходную разомкнутую САР подключая
последовательно ступенчатый генератор, 2 сумматора, усилитель, тиристорный
преобразователь, генератор и ДПТ, далее на выход генератора подключаем вход
контура обратной связи (ОСН), а выход подключаем на отрицательный вход второго
сумматора далее на выход двигателя постоянного тока подключаем вход
тахогенератора, а выход подключаем к осциллографу, вследствие чего получаем
исходную разомкнутую САР рис. 2.1
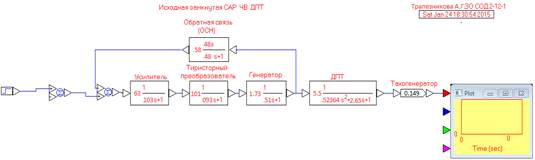
Рис.2.1 - Исходно разомкнутая САР
Выполнено моделирование исходно замкнутой и
разомкнутой САР для проверки оценки качества САР.
3. Оценка устойчивости разомкнутого контура САР
Разомкнутый контур САР состоит из устойчивых
элементов, но в свою очередь содержит контур обратной связи (ОСН).
Следовательно, САР может выть неустойчивой в разомкнутом состоянии. Оценка
устойчивости разомкнутой САР осуществляется с целью проверки выполнения необходимого
условия практического применения критерия Нейквиста: разомкнутый контур должен
быть устойчивым. Критерий Нейквиста выбран для оценки устойчивости САР потому
что инструменты этого критерия (логарифмические частотные характеристики) будут
применены при структурно-параметрической оптимизации САР. Последнее является
определяющим в выборе Нейквиста для оценки устойчивости замкнутой САР.
Частотные характеристики разомкнутого контура САР не только позволяют судить о
степени устойчивости замкнутой САР и, косвенно, о ее качестве, но и
вырабатывать меры и средства оптимизации САР. Традиционно, устойчивость
разомкнутого контура определяется с помощью критериев Михайлова и Гурвица.
Однако, имея в своем распоряжении моделирующую программу VisSim,
можно непосредственно по виду переходной характеритики определить, устойчива ли
система. Более того, по виду переходной характеристики качественно можно
оценить и степень устойчивости.
Вводим исходные параметры. Блок transferfunction
является важнейшим при моделировании САУ. Рассмотрим задание параметров данного
блока. Открытие окна свойств данного блока осуществляется двойным нажатием
левой клавиши мыши. Свойства блока показаны на рисунке 3.
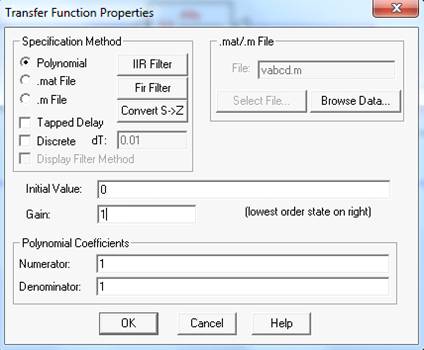
Рис.3 - Окно свойств, блока TransferFunction
Задание свойств блока передаточной функции
осуществляется следующим образом. Допустим, задана передаточная функция ДПТ в
виде
Для задания в VisSim
необходимо соблюдать следующие правила. В поле Gain
(коэффициент усиления системы) вводится значения коэффициента усиления k.
В поле Numerator
вводятся через пробел коэффициенты полинома числителя передаточной функции в
направления убывания степени p.
В нашем случае в данное поле вводятся коэффициенты: Тя, Тм и 1. В поле Denominator
вводятся через пробел коэффициенты полинома знаменателя передаточной функции в
направлении убывания степени p.
В нашем случае это 1. В поле Initial
Value заполняется в
случае, если заданы ненулевые начальные условия. В нашем случае условия не
заданы, поэтому оставляем значение по умолчанию равное 0. Рассмотрим задание
параметров блока тахогенератора.
Открытие окна свойств данного блока
осуществляется двойным нажатием левой клавиши мыши. Свойства блока показаны на
рисунке 3.1.
В поле Gain
вводим
исходные параметры для тахогенератора.
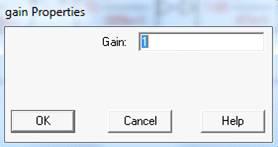
Рис.3.1- Окно свойств, блока gain
После того как ввели исходные параметры для
каждого блока запускаем программу нажав клавишу  (Go)
или F5 и определяем по
виду переходной характеристике, устойчив ли контур рисунок 3.2.
(Go)
или F5 и определяем по
виду переходной характеристике, устойчив ли контур рисунок 3.2.
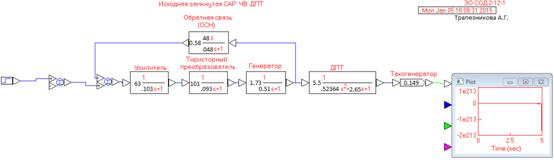
Рис 3.2 - Определение устойчивости разомкнутой
САР
На данной переходной характеристике видно что
разомкнутый контур неустойчив.
4. Стабилизация разомкнутого контура САР.
Стабилизация разомкнутой САР осуществляется с
целью обеспечения выполнения необходимого условия практического применения
критерия Найквиста: разомкнутый контур должен быть устойчивым с запасом по
амплитуде в диапазоне 20 дБ (в 10 раз)
Изменяя параметры элементов контура
местной обратной связи: коэффициенты усиления усилителя и тиристорного
преобразователя, а возможно и постоянной времени звена ОСН, добиться чтобы
переходный процесс стал апериодическим с перерегулированием не более 5 20 %. Целесообразным окажется
выполнить стабилизацию в два этапа: на первом изменять только коэффициенты
усиления и если результаты окажутся недостаточно качественными то на втором
этапе можно уменьшить и постоянную времени звена ОСН.
20 %. Целесообразным окажется
выполнить стабилизацию в два этапа: на первом изменять только коэффициенты
усиления и если результаты окажутся недостаточно качественными то на втором
этапе можно уменьшить и постоянную времени звена ОСН.
Стабилизация контура уменьшением коэффициента
усиления усилителя. Стабилизация САР требует некоторого практического опыта, на
основании которого можно определить в каких звеньях следует провести изменения
параметров Осуществить стабилизацию разомкнутого контура в данном случае можно
меняя параметры двух элементов: усилителя и звена обратной связи по напряжению
(ОСН). Для начала попробуем просто уменьшать (увеличивать) коэффициент усиления
усилителя до тех пор пока разомкнутый контур не будет переведен в состояние
близкое к граничному между устойчивым и неустойчивым режимами.
.1 Изменение коэффициента усиления усилителя
Коэффициент усиления усилителя уменьшен до 63,
рис. 4. Переходная характеристика имеет колебательную компоненту, амплитуда
которой со временем увеличивается. Разомкнутый контур еще не устойчив.
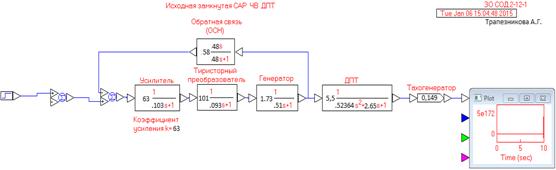
Рис. 4 - Изменение коэффициента усиления
усилителя до 63
Коэффициент усиления усилителя уменьшен с 29.5
до 7.735 рис. 4.1
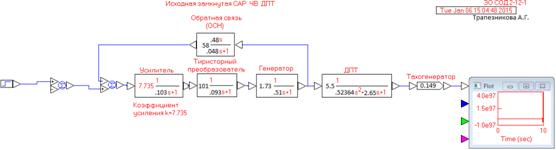
Рис. 4.1 - Изменение коэффициента усиления
усилителя с 63 до 7.735
Переходная характеристика имеет колебательную
компоненту, амплитуда которой со временем увеличивается. Разомкнутый контур еще
не устойчив.
Коэффициент усиления усилителя уменьшен с 7.735
до 0.9668 рис. 4.2

Рис. 4.2 - Изменение коэффициента усиления
усилителя с 7.735 до 0.9668
Переходная характеристика имеет колебательную
компоненту, амплитуда которой со временем увеличивается. Разомкнутый контур еще
не устойчив.
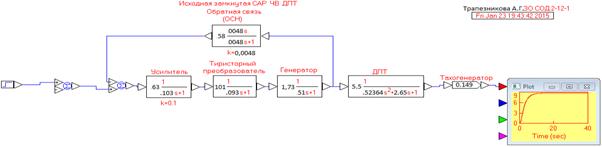
Коэффициент усиления усилителя уменьшен с 0.9668
до 0.12 рис.4.3
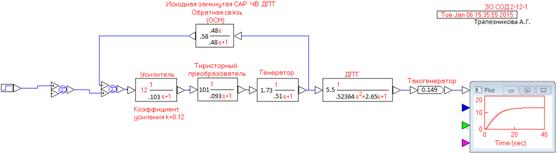
Рис.4.3 - Изменение коэффициента усиления
усилителя с 0.9668 до 0.12
Переходная функция устанавливается
на уровне 13, что говорит об устойчивости разомкнутого контура САР. Желательно
иметь усиление разомкнутого контура (2040 дБ), а запас устойчивости по
амплитуде
(620 дБ). Таким образом, изменением
только коэффициента усиления усилителя не удается получить удовлетворительных
характеристик разомкнутого контура. Следовательно, требуется более глубокая
стабилизация.
.2 Изменение постоянной времени
контура обратной связи по напряжению
Методом проб и ошибок будем изменять
постоянную времени инерционно-дифференцирующего звена ОСН и усиления усилителя.
Основная цель состоит в том, чтобы привести разомкнутый контур на границу
устойчивости.
Увеличиваем постоянную времени
контура обратной связи по напряжению в 10 раз k=4.4сек рис.
4.4. Переходная характеристика имеет колебательную компоненту, амплитуда
которой со временем увеличивается. Разомкнутый контур еще не устойчив.
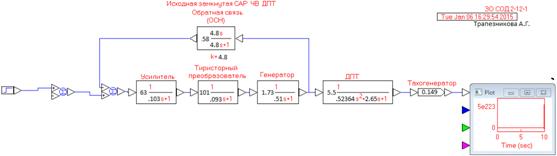
Рис 4.4 - Изменения постоянной времени ОСН,
увеличиваем в 10 раз
Увеличиваем постоянную времени контура обратной
связи по напряжению в 100 раз k=48сек
рис 4.5
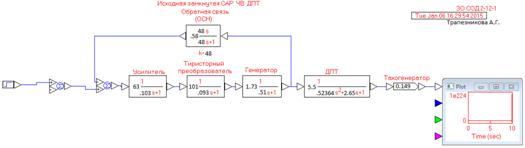
Рис. 4.5 - Изменения постоянной времени ОСН,
увеличиваем в 100 раз
Переходная характеристика имеет колебательную
компоненту, амплитуда которой со временем увеличивается. Разомкнутый контур еще
не устойчив.
Уменьшаем постоянную времени контура обратной
связи по напряжению в 10 раз k=0.044сек
рис. 4.6.
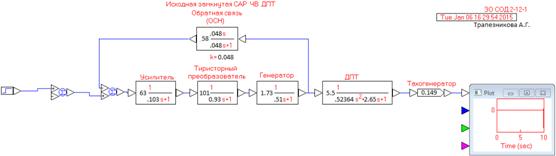
Рис. 4.6 - Изменения постоянной времени ОСН,
уменьшаем в 10 раз
Переходная характеристика имеет колебательную
компоненту, амплитуда которой со временем увеличивается. Разомкнутый контур еще
не устойчив.
Уменьшаем постоянную времени контура обратной
связи по напряжению в 100 раз k=0.0044сек
рис. 4.7
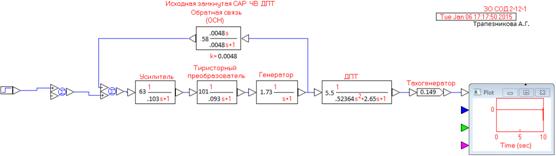
Рис. 4.7 - Изменения постоянной времени ОСН,
уменьшаем в 100 раз
Переходная характеристика имеет колебательную
компоненту, амплитуда которой со временем увеличивается. Разомкнутый контур еще
не устойчив. Таким образом, изменением только постоянной времени контура
обратной связи по напряжению не удается получить удовлетворительных
характеристик разомкнутого контура. Следовательно, требуется более глубокая
стабилизация.
4.3 Изменение коэффициента усиления усилителя и
постоянной времени контура обратной связи по напряжению.
Так как в обоих случаях не удается получить
удовлетворительных характеристик разомкнутого контура следует изменить
коэффициент усиления усилителя и постоянной времени контура обратной связи по
напряжению.
Увеличиваем коэффициент усиления усилителя с
0.12 до 0.5 и уменьшаем постоянную времени ОСН в 10 раз k=0.048
рис.4.8. Переходная характеристика имеет колебательную компоненту, амплитуда
которой со временем увеличивается. Разомкнутый контур еще не устойчив.
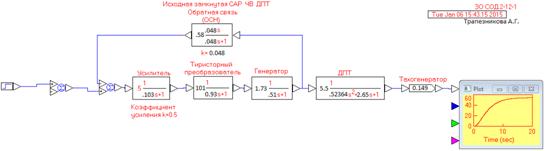
Рис.4.8 - Увеличиваем Ку до 0.5, уменьшаем ОСН в
10 раз k=0.048
Увеличиваем коэффициент усиления усилителя с 0.5
до 0.8 и уменьшаем постоянную времени ОСН в 100 раз k=0.0048
рис.4.9

Рис. 4.9 - Увеличиваем Ку до 0.8, уменьшаем ОСН
в 100 раз k=0.0048
Переходная характеристика имеет колебательную
компоненту, амплитуда которой со временем увеличивается. Разомкнутый контур еще
не устойчив. Уменьшение постоянной времени ОСН до 0.0048 сек позволило довести
значение коэффициента усиления усилителя в критическом, граничном режиме САР до
величины 0.8. Значение коэффициента усиления усилителя, при котором разомкнутый
контур находится вблизи границы устойчивости, повысилось с 0.12 до 0.8.
Остается обеспечить запас устойчивости по
амплитуде контура местной обратной связи путем уменьшения коэффициента усиления
усилителя рис 4.10
Уменьшаем усиление усилителя в 10 раз с 0.8 до
0.08 т.е. на 20 дБ
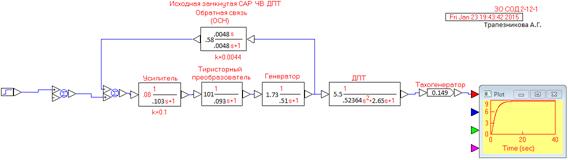
Рис. 4.10 - Уменьшение Ку в 10 раз с 0.8 до 0.08
Это и есть запас устойчивости по амплитуде
контура местной обратной связи. Результирующее усиление разомкнутого контура
всей САР составляет примерно 10 единиц, что видно из установившегося значения
переходной функции.
5. Оценка устойчивости замкнутой САР
Оценка степени устойчивости замкнутой САР
проводится с це- лью определения необходимых мер и средств оптимизации САР.
Оценка осуществляется с помощью логарифмического варианта
критерия Найквиста. Это позволяет не только
косвенно, по запасам устойчивости, судить о степени устойчивости САР, но и
численно определить необходимые для предварительной стабилизации измене- ния
значений параметров элементов.
Выделить элементы разомкнутого контура и вызвать
ЛАЧХ и ЛФЧХ. Растянуть и оформить графики. Определить запасы по фазе и
амплитуде. Сравнить их значения с допустимыми. Итак, разомкнутая САР ЧВ ДПТ
стабилизирована.
Поэтому устойчивость замкнутой САР можно
анализировать с помощью критерия Найквиста. Поинтересуемся, окажется ли
устойчивой замкнутая САР, разомкнутый контур которой только что стабилизирован.
Для этого замкнем обратную связь и проверим, как поведет себя переходная
характеристика рис.5.
Рис.5 - Оценка устойчивости САР
Система устойчива, но колебательность переходной
функции чрезмерна. Замкнутая САР требует коррекции. Как видно установившееся
значение переходной функции составляет примерно 7 об/сек, что на 5% меньше
точного значения, равного:
 .
.
Таким образом, точность полученной системы и в
установившемся режиме неудовлетворительна.
6. Коррекция замкнутой САР
Коррекция осуществляется с целью получения
работоспособной САР путем оптимизации коэффициента усиления контура управления.
Если этого оказывается недостаточно, то в главный контур вводится и
настраивается ПИ-регулятор.
Формально, подбор наилучшего значения
коэффициента усиле- ния следует называть параметрической оптимизацией системы,
в то время как введение ПИ-регулятора и определение его наилучших настроечных
параметров является простым случаем структурно- параметрической оптимизации
САР, поскольку во втором случае из- меняется структурная схема.
Построение и анализ ЛАЧХ и ЛФЧХ. Прежде чем
непосред- ственно строить ЛАЧХ и ЛФЧХ (логарифмические амплитудно- частотную и
фазо-частотную характеристики) необходимо задать пре- делы частотного
диапазона, в котором будут построены характери- стики. Для этого в программе VisSim
следует выбрать Analyze
- Frequency
Range и в появившемся
окне задать начало и конец диапа- зона. Значения концов диапазона следует
подбирать так, чтобы на графиках были видны все их характерные особенности. С
другой сто- роны, декад не должно быть слишком много, иначе график получится слишком
мелкий. Возьмем три декады, от 0.1 рад/сек до 100 рад/сек рис. 6.
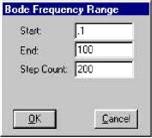
Рис.6 - Задание начала и конца частотного
диапазона и числа шагов для построения ЛАЧХ и ЛФЧХ
Выполните контрольный запуск модели. Убедитесь,
что пере- ходная характеристика асимптотически стремится к установившемуся
значению.
Затем необходимо выделить все
элементы разомкнутого контура, начиная от сумматора и кончая тахогенератором.
При этом генера тор ступеньки и осциллограф не должны быть выделены. Для
выделе- ния элементов нужно, удерживая левую кнопку мыши, переместить курсор
слева сверху вправо вниз (или обратно) по выделяемым эле- ментам и отпустить
кнопку. Выделение показывает VisSim для ка- кого фрагмента схемы
нужно построить ЛАЧХ и ЛФЧХ. Это может быть и не вся САР, а только часть её.
Для вызова графиков ЛАЧХ и ЛФЧХ следует выбрать Analyze FrequencyResponse, в
результате на рабочем пространстве появятся два окна, которые следует растянуть
и поместить ЛАЧХ вверху ,а под ней ЛФЧХ.
FrequencyResponse, в
результате на рабочем пространстве появятся два окна, которые следует растянуть
и поместить ЛАЧХ вверху ,а под ней ЛФЧХ.
На графиках ЛАЧХ и ЛФЧХ следует показать сетку
координат и содержательно их подписать: двойной щелчок по окну графика, на
вкладке Options
поставить галочку Greed
Lines, на вкладке Labels
в графе Title ввести
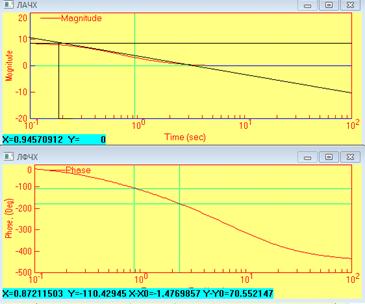
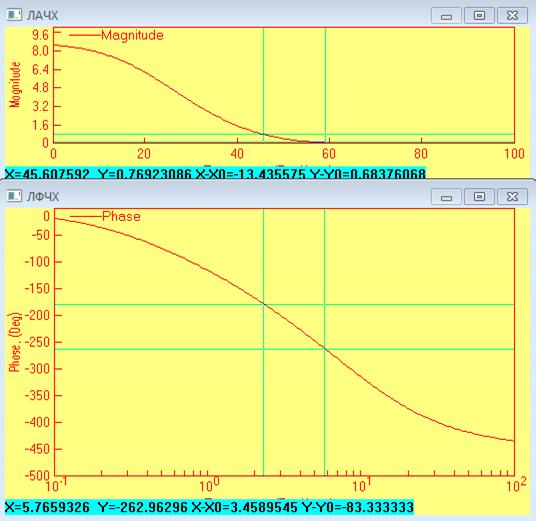
содержательное название характеристики. Нажмите ОК. Определяем запас
устойчивости на графиках ЛАЧХ и ЛФЧХ рис. 6.1. Для определение запасов
устойчивости нужно провести перекрестие посредством Read
coordinate на ЛАЧХ по
амплитуде на 0 а на ЛФЧХ по фазе (-180 градусов).
Затем для определения запаса по
амплитуде нужно определить значение ЛАЧХ на той частоте, где ЛФЧХ пересекает
ось (-180 градусов) и взять это значение с обратным знаком. Для определения
запаса по фазе нужно определить значение ЛФЧХ на той частоте где ЛАЧХ
пересекала ось 0 градусов. Запасы устойчивости по фазе составили γ = -83.33 и по амплитуде L=-0.68дБ.
и по амплитуде L=-0.68дБ.
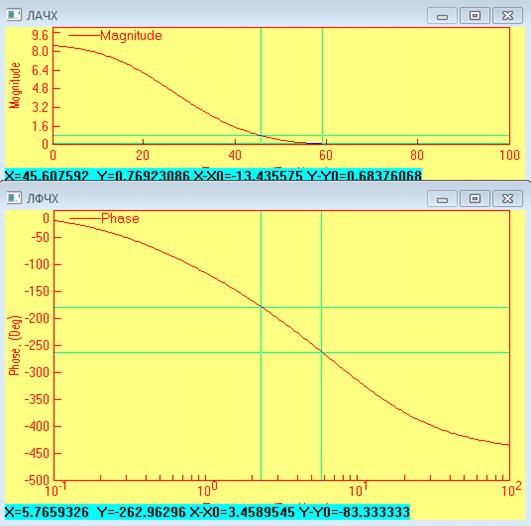
Рис.6.1 - Определение запасов устойчивости по
графикам ЛАЧХ ЛФЧХ
.1 Введение в контур управления П - регулятора
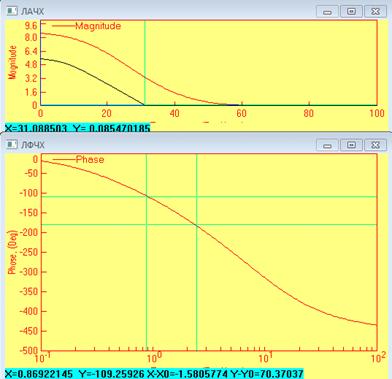
Необходимо обеспечить запасы
устойчивости: по фазе 40 -70 и даже более, а по амплитуде 12-20
дБ. Обеспечим пока лишь требования к запасам устойчивости. Для этого опустим
вниз ЛАЧХ. Опускать нужно настолько, чтобы запас по фазе сделать 70. Из рис 6.2 видно, что ЛАЧХ
пришлось опустить на 3 дБ, это соответствует уменьшению усиления контура в 1.5
раза. Полученное усиление контура 5,5 дБ - мало.
-70 и даже более, а по амплитуде 12-20
дБ. Обеспечим пока лишь требования к запасам устойчивости. Для этого опустим
вниз ЛАЧХ. Опускать нужно настолько, чтобы запас по фазе сделать 70. Из рис 6.2 видно, что ЛАЧХ
пришлось опустить на 3 дБ, это соответствует уменьшению усиления контура в 1.5
раза. Полученное усиление контура 5,5 дБ - мало.
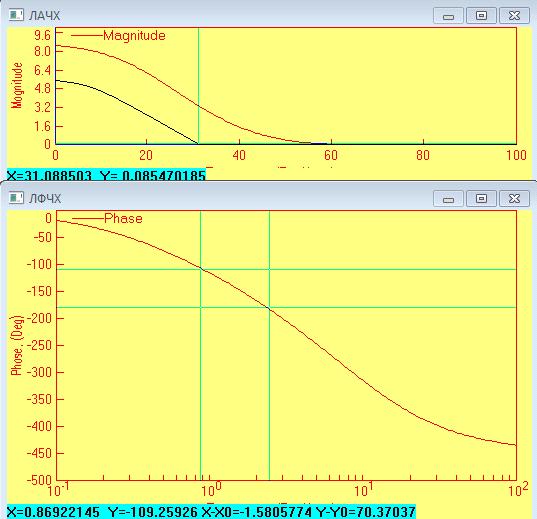
Рис. 6.2 - Определение ЛАЧХ и ЛФЧХ для
устойчивого контура
Как видно из рис. 6.2 запасы устойчивы
обеспечены, но усиление контура мало. Оно уменьшено, что говорит о низком
качестве работы полученной САР в установленном режиме
Уменьшением усиления контура
обеспечивается в схеме анализируемой модели введением усилителя (gain) с
усилением  .
.
Этот усилитель может рассматриваться как П -
регулятор. При безошибочной работе в установившимся режиме, отрабатывая
единичную ступеньку, САР обеспечивала бы на выход.
 е
е
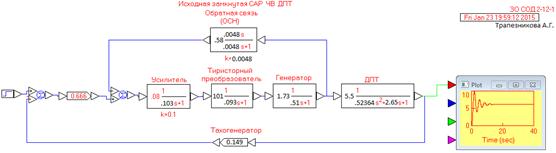
Рис. 6.3 - Введение П - регулятора в схему
Как видно из рис. 6.3 в
установившимся режиме, отрабатывая единичную ступеньку, САР обеспечивает на
выходе 6.3 об/сек. Следовательно, относительная ошибка регулирования
составляет:  , что соответствует 10%.
, что соответствует 10%.
Переходная характеристика предварительно
скорректированной САР свидетельствует о сравнительно хорошем качестве
переходного режима САР и о неудовлетворительном качестве ее работы в
установившимся режиме. Следовательно, оптимизация усиления контура не позволяет
получить САР удовлетворительного качества. Поэтому следует провести более
серьезную коррекцию САР на основе структурно-параметрической оптимизации.
В данном случае это означает что нужно ввести ПИ
- регулятор в контур управления вместо П - регулятора и оптимизировать его
настроечные параметры.
.2 Введение в контур управления ПИ - регулятора
В относительно простых системах введение
ПИ-регулятора, как правило, решает все проблемы. Задача оптимизации сводиться к
нахождению настроечных параметров ПИ-регулятора: постоянной времени и
коэффициента усиления.
Передаточная функция ПИ-регулятора имеет вид:
где: - коэффициент ПИ-регулятора;
- коэффициент ПИ-регулятора;
 - постоянная времени ПИ-регулятора.
- постоянная времени ПИ-регулятора.
Для определения постоянной времени
регулятора следует взять нижнюю ЛАЧХ рис.6.4 для которой выполнены требования к
запасам по фазе и амплитуде и провести к ней касательные с наклонами 0 дБ/дек и
-20 дБ/дек рис. 6.4
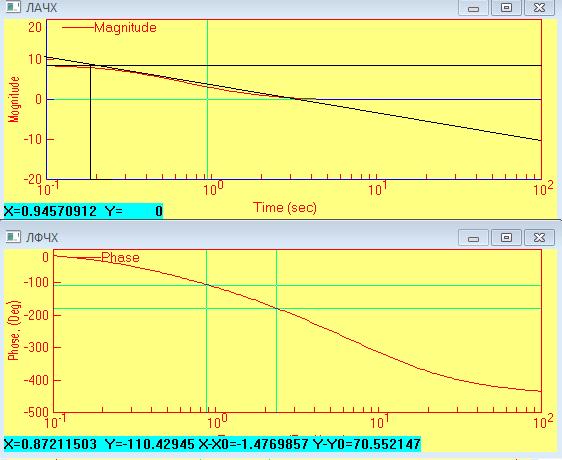
Рис. 6.4 - Построение касательных к ЛАЧХ
Частота точки сопряжения касательной
с наклоном 0 дБ/дек и -20 дБ/дек является обратной величиной к искомой
постоянной времени ПИ - регулятора рад/сек,
рад/сек,  рис. 6.5
рис. 6.5
Рис.6.5 - Определение постоянной времени ПИ -
регулятора.
Для повышения точности определения
ЛАЧХ может быть построена в диапазоне двух декад. Значение коэффициента  =0.5 является хорошим начальным
приближением. Конечно, в коэффициенте усиления ПИ- регулятора нужно учесть и
усиление П-регулятора, равное 0.666 . В результате, значение
=0.5 является хорошим начальным
приближением. Конечно, в коэффициенте усиления ПИ- регулятора нужно учесть и
усиление П-регулятора, равное 0.666 . В результате, значение 
Вводим ПИ - регулятор в разомкнутую САР рис 6.6
Отметим, что двигатель под управлением САР
начинает изменять частоту более плавно по сравнению с тем когда на него
непосредственно поступает ступенчатое приращение напряжения якоря, а время
регулирования САР практически такое же как и у ДПТ в автономной работе. В
завершении приведем ЛАЧХ и ЛФЧХ разомкнутого контура оптимизированной САР рис
6.7.

Рис.6.6 - Введение ПИ - регулятора в схему САР
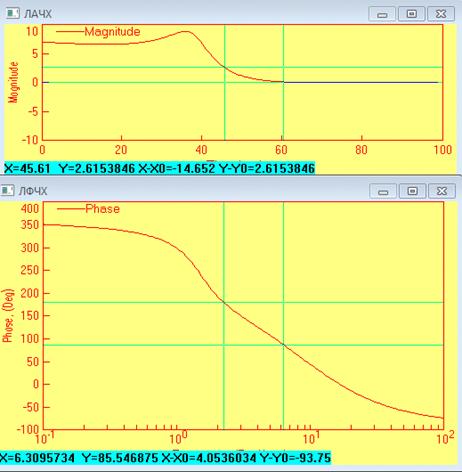
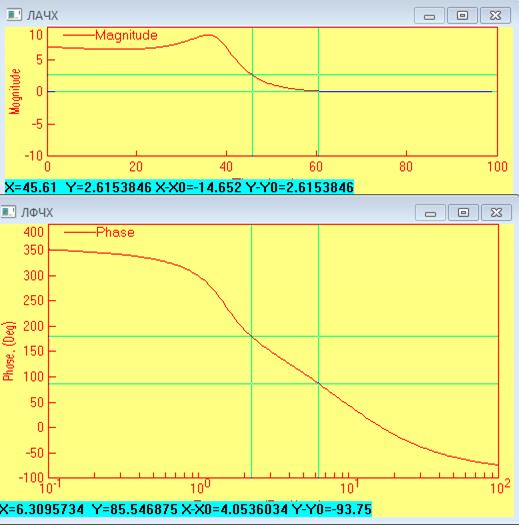
Рис.6.7 - ЛАЧХ и ЛФЧХ оптимизированной САР
VisSim
автоматически добавил к значениям ЛФЧХ 360. Запасы устойчивости и по фазе и по
амплитуде - хорошие. Переходная характеристика разомкнутого контура.
Воспроизводим переходную характеристику разомкнутого контура САР рис 6.8.

Рис.6.8 - Переходная характеристика разомкнутого
контура САР,
Из рис 6.8 следует что переходная характеристика
разомкнутого контура линейно увеличивается со временем что объясняется наличием
интегратора в контуре, входящего составной частью в ПИ - регулятор.
Поскольку использованный для
коррекции метод определения настроечных параметров ПИ-регулятора приближенный,
то несколько улучшить качество САР можно уточнением значений коэффициента
усиления регулятора и его постоянной времени в пределах нескольких десятков
процентов рис 6.9.

Рис. 6.9 - Уточнение значения Ку ПИ - регулятора
Методом проб и ошибок можно
установить, что изменение постоянной времени ухудшает переходную
характеристику, а уменьшение коэффициента усиления до 0.08 позволяет уменьшить
перерегулирование, сделать его 0%, что положительно сказывается на времени
регулирования.
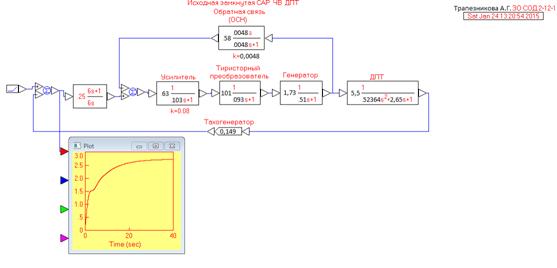
Таким образом, в результате
структурно-параметрической оптимизации получена следующая схема САР
7. Оценка качества САР
Оценка качества выполняется с целью сравнения
показателей качества переходного и установившегося режимов оптимизированной САР
с требованиями, предъявляемыми к САР.
Оценка качества переходного режима САР
осуществляется по переходной функции замкнутой САР рис. 7.
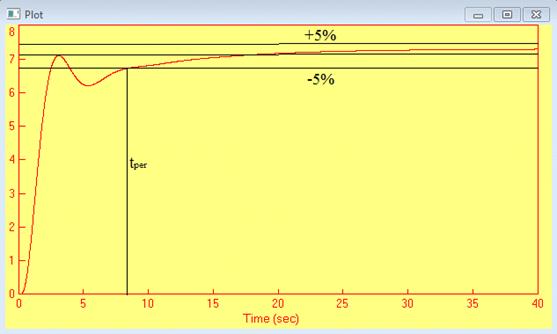
Рис. 7. - Показатель качества по переходной
характеристике САР
Понятие качество линейной САР объединяет
точность ее слежения за задающим сигналом и подавления возмущений, а также
быстродействие.
Качество САР оценивается прямыми и (или)
косвенными показателями переходного и установившегося режимов. Косвенные
показатели это запасы устойчивости САР по фазе и амплитуде и порядок астатизма.
Для статических систем следует назвать и
коэффициент усиления контура. Существует и множество других косвенных
показателей качества. Прямые показатели качества разделяются на показатели
переходного режима - это время регулирования tp и перерегулирование σ%,
и показатели установившегося режима: коэффициенты ошибок по положению с0, по
скорости с1 и по ускорению с2.
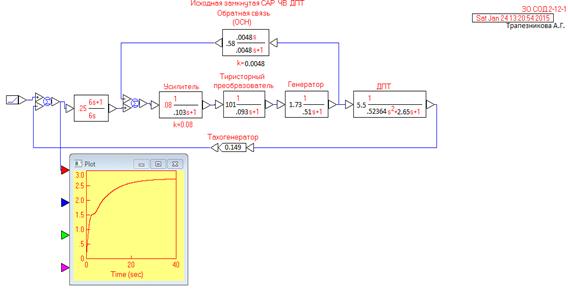
Рис. 7.1. - Определение коэффициента ошибки по
скорости.
Показатели качества переходного режима определяются
по переходной характеристике САР. Для данной САР по рис. 7.1 определены
tp=8,5сек и σ=0% (это относительное
превышение первого максимума переходной функции над ее установившимся
значением). Время перерегулирования находится по формуле:
смотрим рис. 7.2 для пояснения.

Рис.7.2 - Диаграмма пояснения к формуле для
нахождения коэф. Ошибки
Для определения коэффициента ошибки по скорости
с1, к входу САР нужно подключить генератор линейно растущего сигнала.
Установившееся значение сигнала ошибки равно величине с1:
Диаграмма для определения коэффициента ошибки по
скорости астатической САР. Коэффициент ошибки по скорости с1 = 2.6 рис. 7.1.
Для проверки качества САР и в режиме слежения, и
в режиме стабилизации следует одновременно подать не нее и ступенчатое задание,
и ступенчатое возмущение рис. 7.3. Этим воздействиям для наглядности переходной
характеристики следует придать разные задержки. Возмущение задержано
относительно задания на 6 сек. По переходной характеристике видно, что САР
компенсирует возмущение примерно за 28 сек, с максимальной ошибкой в - 6.5
об/сек при величине возмущения в 1 Н·м.

Рис.7.3 - Проверка качества САР в режиме
слежения и в режиме стабилизации
Поскольку в задании не оговаривались требования
к качеству компенсации возмущения, то будем считать полученное качество
удовлетворительным. В противном случае потребуется корректировать схему
несколькими способами, например либо несколько увеличивать коэффициент усиления
контура, либо повысить астатизм САР по возмущению, либо ввести компенсирующее
устройство.
8. Определение области устойчивости САР
автоматический
регулирование электродвигатель ток
Знание диапазона изменения
некоторого параметра системы управления, в котором система сохраняет
устойчивость, позволяет оценить восприимчивость системы к возмущениям,
приводящим к отклонению исследуемого параметра от его оптимального значения.
Определение области устойчивости САР может быть осуществлено методом D-разбиения
по коэффициенту усиления контура. Для этого может быть "приспособлен"
построитель годографа Найквиста в VisSim. Построим
годограф Найквиста. Годограф Найквиста строиться для разомкнутой САР. Выделим
все блоки кроме генератора ступенчатой единичной функции далее нажимаем  Response и получаем
диаграмму на рис.8.
Response и получаем
диаграмму на рис.8.
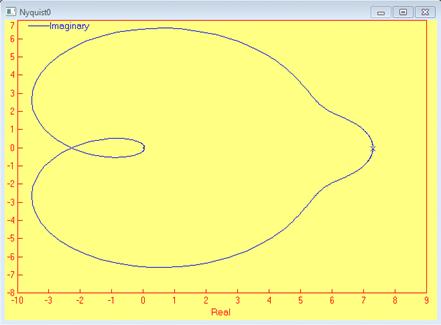
Рис. 8 - Определение области устойчивости САР.
Диаграмма Найквиста
На данной диаграмме мы видим область устойчивых
значений для усилителя, при которых САР сохраняет устойчивость.
Заключение
В данном курсовом проекте
спроектирована система автоматического регулирования частоты вращения вала
двигателя постоянного тока. В процессе исследования САР ЧВ ДПТ пришли к выводу,
что для обеспечения устойчивости системы и хороших показателей ее качества и
точности следует произвести коррекцию коэффициента усиления усилителя и
постоянной времени контура обратной связи а так же существует необходимость
введения корректирующего звена, в связи в виде ПИ - регулятора , с тем что при
исходных данных система неустойчива. С учетом корректирующего звена проведен
анализ качества и точности системы. Скорректированная система имеет
перерегулирование σ
= 0% и
время регулирования системы  8.5c Отметим, что двигатель под
управлением САР начинает изменять частоту более плавно по сравнению с тем когда
на него непосредственно поступает ступенчатое приращение напряжения якоря, а
время регулирования САР практически такое же как и у ДПТ в автономной работе.
Запасы устойчивости и по фазе и по амплитуде хорошие. Получили устойчивую,
оптимизированную и скорректированную систему автоматического регулирования
частоты вращения двигателя постоянного тока.
8.5c Отметим, что двигатель под
управлением САР начинает изменять частоту более плавно по сравнению с тем когда
на него непосредственно поступает ступенчатое приращение напряжения якоря, а
время регулирования САР практически такое же как и у ДПТ в автономной работе.
Запасы устойчивости и по фазе и по амплитуде хорошие. Получили устойчивую,
оптимизированную и скорректированную систему автоматического регулирования
частоты вращения двигателя постоянного тока.
Библиографический список
. Бесекерский В. А., Попов Е. П.
Теория систем автоматического регулирования. Издание четвертое, исправленное.
Москва, издательство «Наука», 19753. Под редакцией А. А. Красовского.
. VisSim 3,0. Учебный курс В.П.
Дьякова. СПб 2003.
. Клиначев Н.В. Моделирование систем
в программе VisSim. Справочная
система. 2001.
. Патюков В.Г., Туйгунова А.Г.
Теория автоматического управления. Методические указания по выполнению
курсового проекта «Анализ системы автоматического регулирования частоты
вращения вала двигателя постоянного тока»
Графическая часть