Расчет параметров настройки типовых регуляторов линейной САР
Содержание
Введение
. Расчет
параметров настройки типовых регуляторов линейной САР
.1 Описание линейной системы
автоматического управления
.2 Анализ объекта регулирования
.3 Расчет коэффициентов
передачи П - регулятора
.4 Расчет параметров настройки
ПИ - регулятора
.5 Расчет параметров настройки
ПИД - регулятора
Заключение
Список использованных источников
Введение
Всякая система регулирования может быть
представлена рядом элементов, выполняющих определенные функции. В данной
контрольной работе будут рассмотрены непрерывная система регулирования,
состоящая из объекта регулирования, автоматического регулятора, и нелинейная
система, включающая нелинейное звено.
Принципиально отличает объект регулирования от
всех остальных элементов системы то, что он обычно задан и при разработке
системы автоматического регулирования не может быть изменен, тогда как
остальные элементы выбираются специально для решения заданной задачи
управления.
1 Расчет параметров настройки типовых
регуляторов линейной САР
.1 Описание линейной системы автоматического
управления
Структурная схема исследуемой линейной системы
автоматического регулирования (САР) изображена на рисунке 1, где АР -
обобщённый автоматический регулятор, ОР - обобщённый объект регулирования.
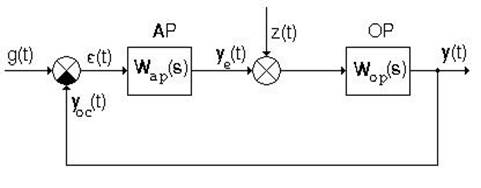
Рисунок 1 - Структурная схема линейной САР
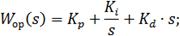
Передаточная функция (ПФ) объекта регулирования:

Передаточная функция автоматического регулятора
с независимыми параметрами:
где  коэффициент
передачи
коэффициент
передачи
П  cоставляющей
ПИД закона
регулирования;
cоставляющей
ПИД закона
регулирования;
 коэффициент
передачи
коэффициент
передачи
И составляющей;
 время изодрома;
время изодрома;
 коэффициент
передачи
коэффициент
передачи
Д - составляющей;
 время прелварения.
время прелварения.
.2 Анализ объекта регулирования
Кривая разгона показывает реакцию объекта
регулирования на единичное ступенчатое воздействие. Она строится по данным,
полученным в результате решения дифференциального уравнения системы при
скачкообразном входном воздействии и нулевых начальных условиях.
Передаточная функция объекта регулирования:

Построим кривую разгона, с помощью системы MATLAB.
SCRIPT
1:=1.2;T1=21;T2=146;T3=336;T4=0;T5=0;Kop=1;=tf([T5 T4 Kop],[T3 T2 T1 T0])
Анализ переходной характеристики ОР показывает,
что объект:
) обладает свойством самовыравнивания;
) является многоемкостным;
) характеризуется запаздыванием.
Рисунок 2 - Кривая разгона ОР
.3 Расчет коэффициентов передачи П - регулятора
Степень затухания 
Степень колебательности переходного процесса:

Порядок расчёта  методом
расширенных ЧХ:
методом
расширенных ЧХ:
) расширенная АФЧХ объекта:

) инверсная (обратная) расширенная АФЧХ объекта:

3) инверсная расширенная АФЧХ объекта
алгебраическом виде:
) линия равной степени затухания 
) коэффициент усиления П регулятора
определяют при
регулятора
определяют при 
) проверка  по
переходной характеристике САР:
по
переходной характеристике САР:
SCRIPT 2:=0.22;=0:0.001:0.2;=(T5*((j-m).*w).^2+T4*(j-m).*w+Kop)./(T3*((j-m).*w).^3+T2*((j-m).*w).^2+T1*(j-m).*w+T0);
Win=1./Wex;=real(Win);
J=imag(Win);=w*(m^2+1).*J;=m.*J-R;(Kp,Ki);xlabel('Axis
Kp');ylabel('AxisKi');grid
Рисунок 3 - Кривая равной степени затухания
Согласно полученной кривой  Отсюда
коэффициент передачи П - регулятора
Отсюда
коэффициент передачи П - регулятора  Построим
переходную характеристику САР с П - регулятором.
Построим
переходную характеристику САР с П - регулятором.
SCRIPT 3:
Wop=tf([T5 T4 Kop],[T3 T2 T1 T0]);
Wap1=tf(2.89,1);=series(Wap1,Wop)
=feedback(W1,1) (Fi1);grid
Рисунок 4 - Переходная характеристика САР с П -
регулятором
Определяем полученную в результате синтеза
степень затухания по формуле:

((1.02-0.707)-(0.784-0.707))/(1.02-0.707)
ans =0.7539
Полученная степень затухания примерно совпадает
с заданной ( , значит
коэффициент передачи выбран верно.
, значит
коэффициент передачи выбран верно.
1.4 Расчет параметров настройки ПИ - регулятора
Передаточная функция ПИ - регулятора
определяется по формуле:
Настроечные параметры  и
и
 определяют
по точке экстремума линии равной степени затухания
определяют
по точке экстремума линии равной степени затухания  в
соответствии с рисунком 3.
в
соответствии с рисунком 3.

SCRIPT 5:=tf([T5 T4 Kop],[T3 T2 T1
T0]);
Wap2=tf([1.355 0.139],[1
0]);=series(Wap2,Wop)
Рисунок 5 - Переходная характеристика САР с ПИ -
регулятором
Определяем полученную в результате синтеза
степень затухания по формуле:

SCRIPT 6:
((1.4-1)-(1.1-1))/(1.4-1)
ans =0.7500
Полученная степень затухания полностью совпадает
с заданной (, значит
коэффициент передачи выбран верно.
.5 Расчет параметров настройки ПИД регулятора
Передаточная функция ПИД - регулятора
определяется по формуле:

Линия,
равной степени затухания:

Так как для ПИД - регулятора необходимо
определить три коэффициента, то построим кривую равной степени затухания с
учетом времени дифференцирования 
SCRIPT
7:=0.22;=0:0.001:0.2;=(T5*((j-m).*w).^2+T4*(j-m).*w+Kop)./(T3*((j-m).*w).^3+T2*((j-m).*w).^2+T1*(j-m).*w+T0);
Win=1./Wex;
R=real(Win);
J=imag(Win);=w*(m^2+1).*(J+w*1.438);=m.*J-R+2*m.*w*1.438;(Kp,Ki);xlabel('Axis
Kp');ylabel('Axis Ki');grid
Рисунок 6 - Кривая равной степени затухания
Коэффициенты и
определяем
по кривой равной степени затухания. =
1,6, =
0,163. Передаточная
функция ПИД - регулятора будет иметь вид:

SCRIPT 8:=tf([T5 T4 Kop],[T3 T2 T1
T0]);
Wap3=tf([1.438 1.6 0.163 ],[1
0]);=series(Wap3,Wop)(Fi3);grid
Рисунок 7 - Переходная характеристика САР с ПИД
- регулятором
Определяем полученную в результате синтеза
степень затухания по формуле:

SCRIPT 9:
((1.4-1)-(1.1-1))/(1.4-1)
ans = 0.7500
Полученная степень затухания полностью совпадает
с заданной (, значит
коэффициент передачи выбран верно.
Заключение
Задача выбора параметров настройки в системе
автоматического регулирования или управления состоит в том, чтобы найти такие
параметры регулятора, при которых переходный процесс в системе удовлетворяет
следующим требованиям:
· затухание переходного процесса
должно быть интенсивным;
· перерегулирование должно быть
минимальным;
· продолжительность переходного
процесса должна быть минимальным.
Большинство уравнений объектов являются
нелинейными, однако в этих случаях знание решений, полученных для линейных
систем, часто дает возможность подойти к решению для нелинейной системы.
автоматический линейный регулятор
Список использованных источников
1. Гороновский И.Т. Краткий
справочник по химии [Текст] / И.Т. Гороновский и др. - Наукова думка, 2012. -
739 с.
2. Луценко В.А. Математическое
моделирование химико-технологических процессов на аналоговых вычислительных
машинах [Текст] / В.А. Луценко, Л.Н. Финякин 2-е изд. перераб. и доп. - М.:
Химия, 2009.
. Демченко В.А. Автоматизация
и моделирование технологических процессов АЭС и ТЭС [Текст] / В.А. Демченко -
Одесса: Астропринт, 2011. - 305 с.
. Казаков А.В. Основы
автоматики и автоматизации химических производств. Учебное пособие для ВУЗов
[Текст] / А.В. Казаков, М.В. Кулаков, Ю.К. Мелюшев - М.: Машиностроение, 2010.
- 376 с.