|
Наименование
параметра
|
Обозначение и
величина
|
|
Длина кривошипа
О1А, м
|
LO1A = 0,1
|
|
Длина шатуна
АВ, м
|
LAB = 0,4
|
|
Длина коромысла
О2В, м
|
LO2B
= 0,32
|
|
Длина коромысла
О2С, м
|
LO2C
= 0,45
|
|
Длина шатуна CD, м
|
LCD
=0,55
|
|
Масса кривошипа
О1А, кг
|
m1
=23
|
|
Масса шатуна
АВ, кг
|
m2
= 8
|
|
Масса коромысла
О2С, кг
|
m3
= 9
|
|
Масса шатуна CD, кг
|
m4
=10
|
|
Масса ползуна D, кг
|
m5
= 40
|
|
Моменты инерции
звеньев IS1 относительно их центров тяжести, кг×м2 (определяются по формуле ISi = (mi×Li2)/10).
|
IS1 =0,023 IS2 =0,128
IS3 =0,9216 IS4 =0,2025
|
|
Частота
вращения О1А, об/мин
|
nO1A
=200
|
|
Числа зубьев
зубчатых колёс
|
z1 =12; z2 = 20
|
|
Модуль зубчатых
колёс, мм
|
m =10
|
|
Рабочий угол
поворота кулачка
|
jРАБ =260°
|
|
Ход толкателя
|
Smax
=70 мм
|
|
Минимальный
угол передачи
|
gmin =60°
|
|
Центры тяжести
звеньев, обозначенные буквой S, расположены
на середине звеньев
|
|
Технологическое
усилие, действующее на ползун D при его
движении вправо F =4100 Н. При движении ползуна D влево усилие F = 0.
|

Рисунок 1 - Кинематическая схема рычажного
механизма
1. Структурный анализ рычажного механизма
Механизм плоский рычажный.
Для этого механизма: т = 5; р5 = 7; р4
= 0.
Степень подвижности механизма определяется по формуле П.Л.
Чебышева:
W = 3n - 2р5 -
р4 = 3·5 - 2·7 - 0 = 1,
где n - число подвижных звеньев;
р5 - число пар пятого класса;
р4 - число пар четвёртого класса.
Механизм имеет одну степень подвижности. Для определённости
движения всех звеньев механизма необходимо иметь одно входное звено.
Разложим механизм на группы Асура.
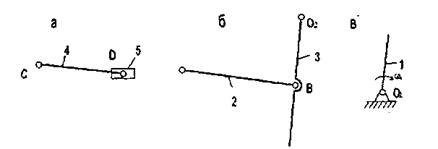
Рисунок 2 - Строение механизма:
а - группа Ассура 2-го класса, 2-го вида, 2-го порядка;
б - группа Ассура 2-го класса, 1-го вида, 2-го порядка;
в-механизм 1-го класса или группа начальных звеньев
2. Кинематический анализ
рычажного механизма
2.1 Определение скоростей звеньев механизма
Кинематическая схема механизма в 12 положениях строится в
масштабе
kS = LO1A / O1A =0,1/40=0,0025.
Для примера рассмотрим 2-е положение механизма.
Угловая скорость начального звена ОА
ω1 = p× nO1A / 30 = 3,14×200/30 =21 рад/с
VA = ω1·LO1A = 21×0,1 =2,1 м/с
Масштаб плана скоростей
kV = VA / (рV а) = 2,1/110 =0,02 м/(с×мм)
где рV а - длина отрезка в мм на
плане скоростей, соответствующего скорости т.А.
Вектор скорости VA ^ ОА и направлен в сторону
вращения кривошипа (здесь и далее в пояснительной записке вектора выделены
курсивом и жирным шрифтом).
Рассматривая движение точки В (переносное и относительное)
получим векторные уравнения для построения скорости точки
VB = VA + VBA,A3
= VO2 + VВO2
где VBA ^ BA; VO2
= 0; VВO2 ^ BO2.
Величина (модуль) скорости точки В
VB = (рV b)× kV = 80×0,02 =1,6 м/с
Скорость точки С коромысла определяем с помощью теоремы
подобия
VСO2 / VBO2 = VС / VB = (рV c)× kV / (рV b)× kV = LCO2 / LBO2
отсюда VС = (рV c)× kV =75×0,02 =1,5 м/с
Векторное уравнение для нахождения скорости точки D имеет следующий вид:
VD = VC + VDC,
VD = VDx + VDDx
где VDx = 0 - абсолютная скорость
точки, принадлежащей неподвижной направляющей ползуна D;
VDC ^ DВ;
VDDx - параллельна направляющей
ползуна.
Скорость точки D
VD= (рV d) × kV =130×0,02=2,6 м/с.
Определение скоростей центров тяжести звеньев производится с
помощью теоремы подобия:
VS1= (рV s1)
kV =55×0,02 =1,1 м/с,S2= (рV s2)
kV =40×0,02 =0,8 м/с,S3= (рV s3)
kV = 65×0,02 =1,3 м/сS4= (рV s4)
kV =17,5×0,02 =0,35 м/с
Определение угловых скоростей звеньев:
ω1 =21 с-1
ω2 = VAB
/ LAB = (ab)× kV
/ LAB = 110×0,02/0,4 =5,5 с-1
ω3 = VB
/ LBO2 = (рV b)× kV
/ LBO2 = 80×0,02/0,32 =5 с-1
ω4 = VDC
/ LDC = (cd)× kV
/ LDC = 35×0,02/0,55
=1,27 с-1
Направление угловой скорости ω2 определяем по относительной линейной скорости. Если в положении 2
к точке В приложить вектор VBA, то ω2 будет направлена по часовой стрелке. Направление угловых
скоростей остальных звеньев отыскиваем аналогично: ω3 и ω4 направлены против хода
часовой стрелки.
2.2 Определение ускорений точек звеньев механизма
Ускорение точки А
аА = аАOn = ω12·LOA =212×0,02 =44,1 м/с2.
Вектор аА1 направлен от точки А к точки О.
Масштаб
плана ускорений
kа = аA / (рaа) = 44,1/90 =0,5 м/с2
,
где рАа - длина отрезка в мм на плане,
соответствующего ускорению точки А.
Рассматривая движение точки В (переносное и относительное)
получим векторные уравнения для построения ускорения точки
аB = аA + аBAn + аBAt;
аB = аO2 + аBO2n + аBO2t.
Первое уравнение:
аBAn || AB; аBAt ^ BA.
аBAn = ω22×LAB =5,52×0,4 =12,1 м/с2.
Второе уравнение:
аO2 = 0;
аBO2n || BO2; аBO2t ^ BO2.
аBO2n = ω32×LBO2 =52×0,32 =8 м/с2.
Величина (модуль) ускорения точки В
aB = (рa b)× ka =78×0,5 =39 м/с2
Ускорение точки С коромысла определяем с помощью теоремы
подобия
aСO2 / aBO2
= (рa c)× ka
/ (рa b)× ka
= LCO2 / LBO2
отсюда aС = (рa c)× ka =105×0,5 =52,5 м/с2.
Векторное уравнение для нахождения ускорения точки D имеет следующий вид:
aD = aC + aDCn
+ aDCt;D = aDx + aDDxk
+ aDDxr,
где aDCn || DC; aDCt ^ DC;DCn = ω42×LCD =1,272×0,55 =0,89 м/с2.
aDx = 0; aDDxk = 0; aDDxr || xx.
Абсолютное ускорение точки D
aD= (рa d) ka =106×0,5 =53 м/с2.
Определение ускорений центров тяжести звеньев производится с
помощью теоремы подобия:
aS1= (рa s1)
ka =45×0,5 =22,5 м/с2 S2=
(рa s2)
ka = 65×0,5 =32,5 м/с2 S3=
(рa s3)
ka =52×0,5 =26 м/с2,S4=
(рa s4)
ka =105×0,5 =52,5 м/с2 S5=
aD =(рa d) ka =106×0,5 =53 м/с2
Определение угловых ускорений звеньев:
Угловое ускорении звена 1 e1 = 0 (т.к. ω1 = const),
e2 = аBAt / LAB
= (nBA b)× ka / LAB
=80×0,5/0,4 =100с-2
e3 = аBO2t / LBO2
= (nBO2 b)× ka
/ LBO2 =50×0,5/0,32
=78,125с-2
e4 = аDCt / LDC
= (nDC d)× ka / LDC
=4×0,5/0,55 =3,636 с-2
e5 = 0, т.к. звено 5 совершает только
поступательное движение.
Направление углового ускорения e2 определяем по
направлению вектора аBAt, перенесённого в точку
В. Угловое ускорение e2 направлено против вращения часовой стрелки.
Направление угловых ускорений остальных звеньев отыскиваем аналогично: e3 направлено против
вращения часовой стрелки, e4 направлено по ходу часовой стрелки.
2.3 Кинематический анализ
механизма методом графического дифференцирования
Диаграмму «Путь-время» строим по перемещениям точки D,
полученным при построении кинематической схемы механизма в двенадцати
положениях. Масштаб по оси ординат kS =0,005 м / мм, тот же,
что на схеме механизма.
Масштаб по оси абсцисс
kt = 60 /(L×nOA) =60/145×200 =0,0021с/мм,
где L - длина оси абсцисс.
Диаграмму «Скорость-время» строим путем графического
дифференцирования диаграммы «Путь-время».
kV = kS /(H1× kt) =0,005/0,0021×25 =0,0952 м/с×мм,
где Н1 - полюсное расстояние при
дифференцировании.
Диаграмму «Ускорение-время» строим путем графического
дифференцирования диаграммы «Скорость-время».
Масштаб диаграммы
kа = kV /(H2×kt) =0,0952/0,0021×25 =1,813 м/с2×мм,
где Н2 - полюсное расстояние при
дифференцировании.
Для второго положения механизма по кинематическим диаграммам
VD = V2ГРАФ× kV = 31,5×0,0952 = 2,998 м/с
где V2ГРАФ - ордината графикаV = V(t) в точке 2.
aD = a2ГРАФ× ka =
29,5×2,998 = 88,205 м/с2
где a2ГРАФ - ордината графика «a-t» в точке 2.
Скорости и ускорения точек звеньев механизма представлены в
таблице 2.
Таблица 2. Скорости и ускорения точек механизма в положении
2, м/с
|
Пара- метры
|
Точки
|
|
A
|
B
|
C
|
D
|
S1
|
S2
|
S3
|
S4
|
S5
|
|
V, м/с
|
2,1
|
0,8
|
1,34
|
2,46
|
1,04
|
1,2
|
0,66
|
1,3
|
2,998
|
|
a, м/с2
|
44,1
|
26,5
|
41,4
|
43,5
|
22
|
30
|
22,5
|
44
|
43,5
|
По кинематическим диаграммам VD =2,998 м/с. Погрешность
определения скорости точки D различными методами. aD = 88,205 м/с2(погрешность
0,02%)
Таблица 3. Угловые скорости и ускорения звеньев механизма в
положении 2, с-1
|
Пара- метры
|
Звенья
|
|
OA
|
AB
|
BO2
|
CD
|
|
ω, с-1
|
21
|
3,5
|
4,75
|
0,95
|
|
e, с-2
|
0
|
100
|
78,125
|
6,36
|
3. Кинетостатический
анализ рычажного механизма
3.1 Определение сил
Силы тяжести звеньев определяем по формуле
G = m×g, Н
где g = 9,8 м / с-2 - ускорение силы тяжести.
G1 = 23·9,8 =225 Н
G2 = 8·9,8 = 78,4 Н
G3 = 9·9,8 = 88,2 Н
G5 = 40·9,8 = 392 Н
Сила сопротивления перемещению ползуна, направленная в
противоположную сторону скорости VD
F = 4100 Н
Силы инерции
ФИ1 = m1×aS1 = 23·22 =517,5 Н
ФИ2 = m2×aS21 =8·32,5 =260 Н
ФИ3 = m3×aS3 =9·26 =234 Н
ФИ4 = m4×aS4 =10·52,5 =525 Н
ФИ5 = m5×aS5 =40·53 =2120 Н
Моменты сил инерции звеньев.
МИ1 = JS1× e1 =0,023·0 =0 Н·м ,
МИ2 = JS2× e2 =0,128·100 =12,8 Н·м
МИ3 = JS3× e3 =0,9216·78,125 =72 Н·м,
МИ4 = JS4× e4 =0,2025·3,636 =0,73629
Н·м
3.2 Определение реакций в кинематических парах
Группа CD-D
Составим уравнение равновесия звена CD группы CD-D относительно точки D.
Для положения механизма 2:
åMD = R34t×CD - G4×h1 - ФИ4×h2 - MИ4=0
R34t = (G4×h1×ks + ФИ4×h2×ks + MИ4)/ CD
R34t = (98×90×0,005 + 525×3×0,005 + 0,73629)/ 0,55 =
62 Н
Векторное уравнение равновесия группы
R34n + R34t + G4 + ФИ4 + G5 + ФИ5 + F + R05 = 0.
Реакция R05 перпендикулярна оси ползуна. Путём
построением плана сил определим реакции R34n, R34, R05.
Векторное уравнение равновесия звена D
R45 + G5 + ФИ5 + F + R05 = 0.
Путём построением плана сил определим реакцию R45.
Группа АВ-СО2
Составим уравнение равновесия звена 3 группы АВ-СО2 относительно
точки В.
Для положения механизма 2:
åMВ (звено 3) = - R03t×BO2 + R43×h5 - ФИ3× h4 + G3×h2 + MИ3 =0
R03t = (R43×h5 ×ks - ФИ3× h4 ×ks + G3×h2 ×ks + MИ3)/ BO2
R03t = (6500×80 ×0,005 - 234× 25 ×0,005 + 88,2×90 ×0,005 + 72)/0,32=4820 Н
åMВ (звено 2) = R12t×АB - G2×h1 + ФИ2× h3 + MИ2 =0
R12t = (G2×h1 ×ks - ФИ2× h3 ×ks - MИ2)/ АB
R12t = (260×78 ×0,005 - 78,4× 55 ×0,005 +12,8)/0,4=181,4Н
Векторное уравнение равновесия всей группы АВ-СО2
R03n + R03t + R43 + ФИ3 + G3 + ФИ2 + G2 + R12n + R12t = 0.
Путём построением плана сил определим реакции R03 и R12.
Векторное уравнение равновесия звена 2
G2 + ФИ2 + R32 + R12 = 0.
Путём построением плана сил определим реакцию R12.
Начальная группа звеньев
Уравновешивающая сила приложена в точке контакта зубчатых
колес привода направлена вдоль линии зацепления и имеет плечо hур =
rb (радиус основной окружности).
Уравновешивающую силу определим из уравнения
- G1×h1 - R21 h2 + FУР× h3 = 0
FУР = G1×h1 + R21×h2 / h3 = = 225×35 + 11050×24 / 29=9559,89 Н
Векторное уравнение равновесия звена О1А
G1 + ФИ1 + R21 +FУР + R01 = 0.
Путём построением плана сил определим реакцию R01.
3.3 Определение уравновешивающей силы методом
Н.Е. Жуковского
Используя теорему о жестком рычаге Н.Е. Жуковского
применительно к рассматриваемому механизму, мы имеем возможность проверить
правильность проведенного кинетостатического расчета. С помощью этой теоремы
определяется величина уравновешивающей силы.
В соответствующие точки повернутого на 900 плана
скоростей переносят все силы, действующие на звенья механизма, в том числе и
уравновешивающую силу. При наличии моментов, действующих на звенья механизма,
эти моменты изображаются в виде пары. Взяв сумму моментов всех перенесенных сил
относительно полюса и приравняв ее нулю, определяют из полученного уравнения
величину Fур, считая её неизвестной (искомой). В том случае, если величина Fур, найденная по методу
Жуковского, совпадает или отличается на 5% от величины, найденной в ходе
рассмотренного расчета, полагают, что силовой расчет проведен правильно.
При расчёте моменты сил инерции МИ2, МИ3
и МИ4 не учитываем, ввиду их незначительности.
Скорость т
очки К в зубчатом зацеплении
VK = ω1×m×z2/(2×1000) = 20×10×21/(2×1000) = 2,1 м/с
G1×h1 + G2×h2 - G3×h3 - G4×h4 + ФИ2×h5 + ФИ3×h6 + ФИ4×h7 + ФИ5×pVd + F× pVd - Fур× pVk = 0
Fур = (G1×h1 + G2×h2 - G3×h3 - G4×h4 + ФИ2×h5 + ФИ3×h6 + ФИ4×h7 + ФИ5×pVd + F× pVd)/ pVk
Fур =(225×27 + 78,4×18 - 88,2×13 - 98×13 + 260×55 + 202,5×65 + 525×13 + 2120×130 + 4100× 130)/ 89=9291,53 Н Таблица 4
Реакции в кинематических парах рычажного механизма, Н
|
R01
|
R12
|
R23
|
R03
|
R34
|
R54
|
R05
|
FУР
|
|
14110
|
10832,5
|
4690
|
11382
|
10640
|
1025,5
|
9559,89
|
По методу Н.Е. Жуковского FУР =9291,53 Н, погрешность
от определения величины уравновешивающей силы различными методами составляет
1,83%
4. Синтез кулачкового механизма
Синтез кулачкового механизма заключается в определении
основных размеров кулачкового механизма и построении профиля кулачка, обеспечивающего
заданный закон движения толкателя. Основные геометрические параметры
кулачкового механизма определяют по заданному закону движения и условию
обеспечения допустимого угла давления для механизмов с роликовыми толкателями.
Если задан закон движения толкателя в виде диаграммы
изменения аналогов ускорения, то одно- и двухкратным интегрированием её,
получаем диаграммы аналогов скорости и перемещения.
Для построения профиля кулачка воспользуемся методом
обращённого движения, при котором всем звеньям кулачкового механизма условно
сообщается вращение с угловой скоростью, равной скорости кулачка, но в
противоположном направлении. В результате кулачок становится неподвижным, а
толкатель получает дополнительное вращение относительно кулачка.
По заданному закону движения d2S/dj2= d2S/dj2(j) строим диаграмму d2S/dj2-j.
На оси абсцисс откладываем рабочий угол поворота кулачка jр в масштабе:
kj=(p/180×jp)/L, рад/мм,
где jp - рабочий угол поворота
кулачка, jp = 260°.
L - отрезок на оси абсцисс в мм, соответствующей рабочему
углу, L
= 180 мм.
kj=(3,14/180×260)/180 = 0,025 рад/мм
Интегрируя графически диаграмму d2S/dj2= d2S/dj2(j), получаем график
аналога скорости dS/dj = dS/dj(j), получим диаграмму
перемещений толкателя S=S(j).
Масштаб оси ординат диаграммы перемещений определим по
формуле:
kS = h/(yh)= Smax/hmax=80/54=1,48
м/мм
где h - ход толкателя, м;
yh - отрезок на оси ординат, изображающей величину h, мм.
Масштаб оси ординат диаграммы аналога скорости толкателя
определим по формуле:
kdS/dj = kS/(kj×H2), м /мм,
где Н2 - полюсное расстояние при
интегрировании графика скорости, мм.
kdS/dj = 1,48/(0,025×50) = 0,1185 м /мм
Угловую скорость кулачка принимаем постоянной (ω k=const). При этом условии j= ω×t и оси абсцисс являются
также осями времени, а диаграммы dS/dj= dS/dj(j) и d2S/dj2= d2S/dj2(j) являются диаграммами
скорости и ускорений толкателя.
Масштаб времени:
kt=kj/ ω К, с/мм,
где ω К = ω1 = 21 рад/с.
kt= 0,025/ 21= 0,0012 с/мм
Масштаб скорости:
kV = kdS/dj× ω К = 0,1185 × 21 = 2,4885 м×с-1/мм.
Масштаб оси ординат диаграммы ускорения толкателя:
KW = kd2S/dj2× ω К 2, м×с-2/мм
где kd2S/dj2 = kdS/dj / (kj×H1) - масштаб оси ординат диаграммы аналога ускорения, м/мм;
H1 - полюсное расстояние при интегрировании графика
ускорения.
kd2S/dj2 = 0,1185 /(0,025×50) = 0,0948 м/мм
kW = 0,0948× 21 2 =
41,8068 м×с-2/мм
Заключение
. Выполнен структурный анализ механизма.
Выявлены основные особенности и разновидности групп Асура состав и
последовательность присоединений структурных групп. Рассмотренный механизм,
являющийся механизмом второго класса, структурно работоспособен.
. Найдены положения звеньев механизма и
траектории отдельных точек. Решены задачи определения линейных скоростей и
ускорений точек, а так же угловых скоростей и ускорений звеньев.
. Получены реакции в кинематических парах.
Найдена величина уравновешивающего момента. Максимальная сила инерции в
рассмотренном положении механизма меньше технологического усилия. Максимальная
сила веса звена меньше технологического усилия. Следовательно, основная часть
усилий на звенья и реакций в кинематических парах обусловлена технологическим
усилием.
. Спроектированы кулачковые механизмы,
обеспечивающие заданные законы движения толкателя при выполнении обязательных и
желательных условиях синтеза.
Список литературы
1. Курсовое проектирование по теории механизмов и машин / под
ред. А.С. Кореняко. Киев.: Вища школа, 1970. 332 с.
. Теория механизмов и механика машин / под ред. К.В. Фролова.
М.: Высш. шк., 1998. 496 с.
. Попов С.А. Курсовое проектирование по теории механизмов и
машин. С.А. Попов, Т.А. Тимофеев. М.: Высш. шк., 1998. 351 с.