|
№
пары
|
Кинематическая
пара {№ - №}
|
Обобщённая
координата
|
|
|
S10,см
|
S21,см
|
φ32,
градус
|
|
|
min
|
mid
|
max
|
min
|
mid
|
max
|
min
|
mid
|
max
|
|
1.
|
Поступательная
- А {0 - 1}
|
2
|
10
|
18
|
|
|
|
|
|
|
|
2.
|
Поступательная
- B
{1 - 2}
|
|
|
|
10
|
50
|
90
|
|
|
|
|
3.
|
Вращательная
- D {2 - 3}
|
|
|
|
|
|
|
-80
|
-40
|
0
|
1. Расчёт степени подвижности плоского механизма
по формуле П.Л. Чебышёва
 ,
,
где W - степень
подвижности системы;
n -
количество подвижных звеньев кинематической цепи;
p1
- количество одноподвижных кинематических пар;
p2
- количество двухподвижных кинематических пар.
 .
.
Это значит, что необходимо задать
три координаты каким-либо подвижным звеньям механизма в системе координат,
жестко связанной со станиной, чтобы определить положения всех звеньев. Таким
образом, для управления таким манипулятором требуется три независимых привода.
2. Расчёт маневренности манипулятора. Условно
закрепляем центр схвата посредством шарнира С0 (рис. 2).
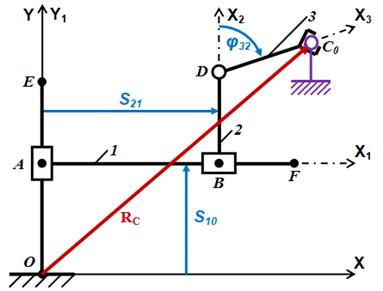
Рис. 2. К расчёту маневренности манипулятора
Здесь число подвижных звеньев осталось прежнее, n
= 3 {1,2 и 3};
число одноподвижных пар изменилось, p1 = 4 {0-1, 1-2, 2-3 и 3-0};
число двухподвижных пар не
изменилось, p2
= 0.
Для полученной схемы рассчитываем число степеней
свободы по формуле П.Л. Чебышева
 ,
,
 .
.
Полученный результат означает, что к
заданной точке С0 центр схвата можно подвести несколькими
конфигурациями системы звеньев, но произвольно изменять можно только одну из
трёх обобщённых координат, например S10, остальные
же станут зависимыми от неё функциями: S21(S10) и φ32(S10).
Вывод: исходная модель имеет три
степени свободы W = 3, а её маневренность составляет Wм = 1.
.1 Корректировка исходной схемы манипулятора
Схема на рис. 2 соответствует данным задачи и на
ней показано фактическое расположение звеньев манипулятора. Построим в масштабе
по средним данным векторный контур ОABDCO
из отрезков схемы манипулятора (рис. 3).
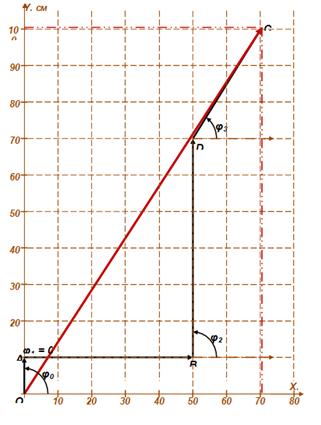
Рис. 3. Векторный контур
1.2 Расчёт параметров положения звеньев
. Расчёт средних значений обобщённых координат



. Расчёт угловых координат в
глобальной системе
φ0 = 90О;φ1 = 0О;φ2 = 90О;φ3 = <φ32> + 90О
= -40 + 90 = 50O.
Средние значения для дальнейших
расчётов сведены в таблицу 4.
Таблица 4. Значения обобщённых
координат и глобальные углы.
|
№
пары
|
Кинематическая
пара {№ звеньев}
|
Параметр
|
min
|
mid
|
max
|
Статус
|
i
|
φi,О
|
sinφi
|
cosφi
|
|
1.
|
Поступательная
пара А {1-0}
|
φ10,
О
|
90
|
90
|
90
|
const
|
1
|
0
|
1,0
|
0,0
|
|
|
S10, см
|
2
|
10
|
18
|
var
|
|
|
|
|
|
2.
|
Поступательная
пара B
{2-1}
|
φ21,
О
|
0
|
0
|
0
|
const
|
2
|
90
|
0,0
|
1,0
|
|
|
S21, см
|
10
|
50
|
100
|
var
|
|
|
|
|
|
3.
|
Вращательная
пара D {3-2}, S32
= L3
|
φ32,О
|
-80
|
-40
|
0
|
var
|
3
|
50
|
0,77
|
0,64
|
|
|
S32,
см
|
40
|
40
|
40
|
const
|
|
|
|
|
. Расчёт координат центра схвата С.
По методу замкнутого векторного контура (рис. 3)
имеем

С учётом принятых обозначений в исходных данных
(табл. 1) векторное уравнение, определяющее положение точки С, можно записать в
виде

Используя разложение любого вектора
на его проекции на оси X и Y, можем
записать следующие выражения
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
. Модуль радиус-вектора центра схвата С
 .
.
Угол α направления
радиус-вектора RС с осью Х
 > 0
> 0
 > 0
> 0
Так как cosα и sinα больше 0,
то угол α
острый
(0O<α<90O), и лежит в
I-ой
четверти, а определяется через арксинус или через арккосинус

Окончательные результаты решения
задачи положения центра схвата С
 ;
;  ;
;  ;
;  .
.
1.3 Расчет скоростей
. Расчёт средних значений относительных
скоростей соседних звеньев в кинематических парах
Поступательная пара А {1-0}
Угловая скорость звена 1 относительно стойки 0, ω10
= 0, так как φ10
= const.
Линейная скорость звена 1 относительно стойки 0:

Поступательная пара В {2-1}
Угловая скорость звена 2
относительно звена 1, ω21 = 0, так
как φ21 = const.
Линейная скорость звена 2
относительно звена 1:

Вращательная пара D {3-2}
Угловая скорость звена 3
относительно звена 2:
градусная мера  ;
;
радианная мера  .
.
Линейная скорость звена 3
относительно звена 2 V32 = 0, так
как S32 = L3 = const
. Расчёт абсолютных угловых
скоростей звеньев относительно стойки:
звено 1:  ;
;
звено 2:  ;
;
звено 3:  .
.
Рассчитанные значения скоростей
сведём в таблицу 5.
Таблица 5. Угловые и линейные
параметры и скорости
|
№
|
Звенья
|
Параметры
|
Значения
|
Относит.
угловые скорости
|
 Абсолютн.
угловые скорости Абсолютн.
угловые скорости Относит. линейные
скорости Относит. линейные
скорости
|
|
|
|
|
|
1.
|
1
|
φ1
|
0О
|
ω10
|
0,0
|
ω1
|
0,0
|
|
|
|
|
S10
|
10
см
|
|
|
|
|
V10
|
4,0
|
|
2.
|
2
|
φ2
|
90О
|
ω21
|
0,0
|
ω2
|
0,0
|
|
|
|
|
S21
|
50
см
|
|
|
|
|
V21
|
20,0
|
|
3.
|
3
|
φ3
|
50О
|
ω32
|
0,349
|
ω3
|
0,349
|
|
|
|
|
S32
= L3
|
60
см
|
|
|
|
|
V32
|
0,0
|
3. Проекции скорости VС
центра схвата С.
Расчёт проекций скорости проводим для n
= 3 по значениям из таблицы 5 по следующим формулам
 ;
;
 .
.


Подставим данные из таблицы 5 и
выполним вычисления

. Модуль вектора скорости центра схвата С
 .
.
Угол β направления
вектора VС с осью Х
 < 0
< 0
 > 0
> 0
Так как cosβ<0, а sinβ > 0, то
угол β тупой (90O<β<180O), и лежит
во II-ой
четверти, а определяется через арккосинус (но не через арксинус)

Окончательные результаты решения
задачи скоростей центра схвата С
 ;
;  ;
;  ;
;  .
.
1.4 Расчёт ускорений
Исходными данными при расчёте ускорений служат
результаты решения задачи скоростей. Для средних значений обобщённых координат
исходные параметры сведены в таблицу 6.
Таблица 6
|
№
|
Линейные
параметры
|
Углы
|
Относительные
скорости
|
Угловые
скорости
|
|
S, см
|
φ,
угл.
град.
|
V,  ω, ω,

|
|
|
1.
|
S10 = 10
|
φ1
= 0
|
V10 = 4,0
|
ω1
= 0,0
|
|
2.
|
S21 = 50
|
φ2
= 90
|
V21 = 20,0
|
ω2
= 0,0
|
|
3.
|
S32 = 40
|
φ3
= 50
|
V32 = 0,0
|
ω3
= 0,349
|
1. Проекции ускорения аС центра
схвата С.
Расчёт проекций ускорения проводим для n
= 3 по значениям из таблицы 6 по следующим формулам
 ;
;
 .
.
Рассчитываем каждую сумму по
отдельным i-м слагаемым
 ;
; ;
;
Подставим численные значения и
вычислим проекцию ахс
При i = 1:  ;
;
При i = 2:  ;
;
При i = 3:  ;
;
 .
.
 ;
;
 .
.
Суммируя полученные результаты,
находим
 .
.
Подставим численные значения и
вычислим проекцию аyс
При i = 1:  ;
;
 .
.
При i = 2:  ;
;
 .
.
При i = 3:  ;
;
 ;
;
 .
.
Суммируя полученные результаты,
находим
 .
.
2. Модуль вектора ускорения центра схвата С
 .
.
Угол γ направления
вектора ac с осью Х
 < 0
< 0
 < 0
< 0
Так как cosγ<0 и sinγ < 0, то
угол γ тупой (-90O<α<-180O), и лежит в
III-ей
четверти, а определяется через арккосинус (а не через арксинус)

Окончательные результаты решения
задачи ускорений центра схвата С
 ;
;  ;
;  ;
;  .
.
Итоговые результаты кинематического
анализа сведём в таблицу 7
Таблица 7. Характеристики центра
схвата манипулятора.
|
Обобщённые
координаты
|
Положение
схвата, см
|
Скорость,
Ускорение,

|
90O
|
XC =
|
75,712
|
VXC =
|
-6,696
|
aXC =
|
-3,132
|
|
S10 =
|
10 см
|
YC =
|
100,648
|
VYC =
|
28,975
|
aYC =
|
-3,732
|
|
S21 =
|
50
см
|
RC =
|
125,941
|
VC =
|
29,739
|
aC =
|
4,872
|
|
φ32
=
|
-40О
|
α
=
|
53,05О
|
β
=
|
103,00О
|
γ
=
|
130,00О
|
2. Моделирование
манипулятора на ЭВМ
Кинематический анализ манипулятора выполним
путём его моделирования на ЭВМ с помощью программы “Манипуляторы 3 степени
свободы v0.2.2”.
Графические результаты моделирования
представлены в файлах “Манипулятор - среднее положение”, “Манипулятор - зона
обслуживания” и “Манипулятор - зона обслуживания -1”.
Данные моделирования представлены в таблице 8 в
сравнении с данными, полученными расчётным путём.
Таблица 8. Сравнительные характеристики центра
схвата
|
Обобщённые
координаты
|
Положение
схвата, см
|
Скорость,
|
|
|
Расчёт
|
ЭВМ
|
|
Расчёт
|
ЭВМ
|
|
φ0
=
|
90O
|
XC =
|
75,712
|
75,71
|
VXC =
|
-6,696
|
-6,7
|
|
S10 =
|
10 см
|
YC =
|
100,648
|
100,64
|
VYC =
|
28,975
|
12,98
|
|
S21 =
|
50
см
|
RC =
|
125,941
|
125,94
|
VC =
|
29,739
|
14,61
|
|
φ32
=
|
-40О
|
α
=
|
53,05О
|
-
|
β
=
|
103,00О
|
-
|
Путём моделирования получена геометрическая
конфигурация зоны обслуживания (рис. 4). Задание предельных координат положения
звеньев манипулятора позволило определить координаты характерных точек зоны
обслуживания (таблица 9).
Таблица 9. Координаты характерных точек зоны
обслуживания.
|
i
|
1
|
2
|
3
|
4
|
5
|
6
|
|
Xi, см
|
10,00
|
10,00
|
90,00
|
129,39
|
129,39
|
49,39
|
|
Yi, см
|
102,00
|
118,00
|
118,00
|
84,95
|
68,95
|
68,95
|
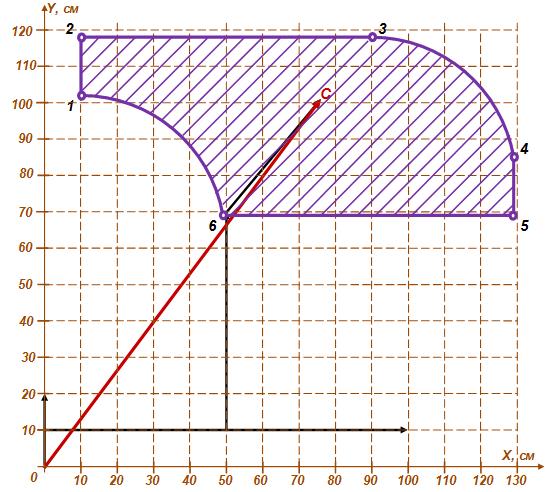
Рис. 4. Геометрическая конфигурация зоны
обслуживания
3. Графоаналитический метод планов
. Построение плана механизма (рис. 5).
Принимаем произвольно АВ = 150 мм. Тогда
масштабный коэффициент плана будет:
 .
.
Размеры изображений на плане
составляют (показаны длины звеньев)
 ;
;
Построим в масштабе план
манипулятора (рис. 5) для средних значений обобщённых координат, указанных в
таблице 4. Красной линией показан радиус-вектор центра схвата ОС. Его длина,
измеренная на распечатке рисунка, ОС = =189,5 мм.
 ,
,
измеренный угол α = 53О, что
совпадает с аналитическим решением.
. Построение плана механизма (рис.
6).
На плане механизма (рис. 5) дуговой
стрелкой показана абсолютная угловая скорость звена 3. Направление выбрано в
сторону возрастания обобщённой угловой координаты φ32.
 .
.
Линейными стрелками показаны
относительные скорости поступательного движения в парах А и В и вращательного
движения в паре D. Масштаб векторов скоростей на рис.
5  .
.
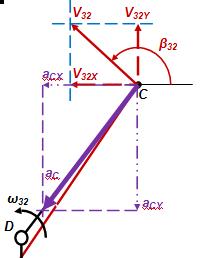
Рисунок 5
. Построение плана скоростей
Построим план скоростей (рис. 6).
Произвольно выберем масштаб скоростей  .
.
Определим величину образов векторов
скоростей

Определим относительную линейную
скорость точки С от вращательного движения звена 3 относительно точки D

Направление вектора скорости  перпендикулярно
направлению звена 3, т.е. угол этого вектора
перпендикулярно
направлению звена 3, т.е. угол этого вектора
 .
.
Найдём проекции этого вектора


Определим величину образов векторов
скоростей



3. Построение плана ускорений
Исходные данные, необходимые для
построения плана ускорений.
Длина LDC = L3 = 40 см.
Скорость ω3 = 0,349  .
.
Угловые ускорения ε0 = ε1 = ε2 = ε3 = 0.
Относительные ускорения а10
= а21 = 0.
Точка С вращающегося звена 3
движется по окружности с центром D с постоянной угловой скоростью ω3.
Тангенциальное ускорение отсутствует, так как ε3∙L3 = 0. Вектор
полного ускорения  содержит
только нормальную составляющую. Она направлена к центру D независимо
от направления вращения (ω3), а модуль
ускорения имеет величину:
содержит
только нормальную составляющую. Она направлена к центру D независимо
от направления вращения (ω3), а модуль
ускорения имеет величину:
 .
.
Ввиду простоты плана ускорений
построим его на рис. 5 (сиреневый цвет). Произвольно выберем масштаб ускорений  .
.
Направление вектора ускорения противоположно
направлению звена 3, т.е. угол этого вектора
 .
.
Найдём проекции этого вектора
 ;
;
 .
.
Определим величину образов вектора
ускорений
 ;
;
 ;
;
 .
.
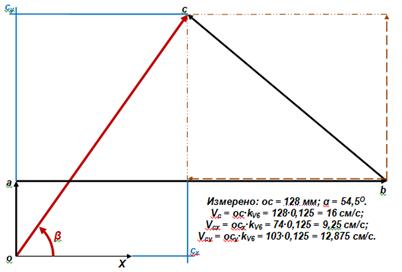
Рис. 6. План скоростей
В таблице 10 произведено сравнение величин компонент
скорости центра схвата определённых 4 способами.
Таблица 10. Сравнительные скорости центра
схвата.
|
Компонента
скорости центра схвата
|
Скорость,
|
|
Расчёт,
стр. 8
|
Моделирование
на ЭВМ
|
План
скоростей
|
Исправленный
расчёт, стр. 18
|
|
VXC
|
-6,696
|
-6,7
|
9,25
|
9,304
|
|
VYC
|
28,975
|
12,98
|
12,875
|
12,975
|
|
VC
|
29,739
|
14,61
|
16,0
|
15,966
|
|
β,
угл.
град.
|
103,00О
|
---
|
54,5О
|
54,36О
|
Расчёт на стр. 8 и моделирование на ЭВМ
выполнены с ошибками, т.к. основаны на ошибочных формулах, приведённых в МУ на
стр. 9 (16) и (17) и на стр. 17 без номеров.
Исправленные формулы приведены в файле “МУ - стр
8 - исправление”
Ниже на стр. 18 приведён исправленный расчёт со
стр. 8 настоящего файла.
Исправленный расчёт со стр. 8


Подставим данные из таблицы 5 и
выполним вычисления

4. Модуль вектора скорости центра схвата С
 .
.
Угол β направления
вектора VС с осью Х
 > 0
> 0
 > 0
> 0
Так как cosβ>0 и sinβ > 0, то
угол β
острый
(0O<β<90O), и лежит в
I-ой
четверти, а определяется через арккосинус или через арксинус

Окончательные результаты решения
задачи скоростей центра схвата С
 ;
;  ;
;  ;
;  .
.