Сканирующая зондовая микроскопия
Содержание
Введение
. Сканирующая зондовая микроскопия
.1 Теоретические основы СЗМ
.2 Сканирующие туннельные микроскопы
.3 Атомно-силовая микроскопия
.4 Ближнепольная оптическая микроскопия
. Исследования поверхности кремния с использованием сканирующего
зондового микроскопа NanoEducator
.1 Конструкция и принцип работы сканирующего зондового микроскопа
NanoEducator
.2 Проведение СЗМ эксперимента
Список используемых источников
Введение
Физика поверхностных явлений в
настоящее время является одним из наиболее интенсивно развивающихся разделов
науки. Именно на фундаментальных исследованиях в области физики поверхности
твёрдого тела основаны успехи современной микро и наноэлетроники. Поэтому
исследование разнообразных электронных, атомных и молекулярных процессов,
происходящих на поверхности твердых тел, остаётся актуальной задачей.
Наиболее распространенными методами
решения таких задач являются растровая электронная микроскопия (РЭМ),
просвечивающая электронная микроскопия (ПЭМ), атомно-силовая микроскопия (АСМ),
сканирующая туннельная микроскопия (СТМ), микроскопия на основе фокусированных
ионных пучков, вторичная ионная масс-спектрометрия, оже-спектроскопия и другие.
С точки зрения исследования рельефа и физических свойств структур с высоким
латеральным разрешением (менее 10 нм) одной из наиболее перспективных является
атомно-силовая микроскопия(АСМ), важнейшее достоинство которой заключается в
элементарной процедуре подготовки образцов.
Первостепенное значение для
понимания свойств любого объекта имеет знание его атомной структуры. Последние
30 лет микроструктура поверхностей интенсивно изучалась методами дифракции и
рассеяния электронных и ионных пучков, а также электронной спектроскопии.
Однако большинство этих методов первоначально разрабатывались для исследования
объёмной структуры твёрдых тел, поэтому они не всегда годятся для получения
информации о структуре поверхности, тем более на атомном уровне.
В 1981 году Герхард Бинниг и Хайнрих
Рёрер из лаборатории IBM в Цюрихе представили миру сканирующий туннельный
микроскоп(СТМ). С его помощью были получены поразившие всех изображения
поверхности кремния в реальном масштабе. Человек впервые смог увидеть атомы и
прикоснуться к ним.
Развивая идеи, заложенные в СТМ, в
1986 году Герхард Бинниг, Калвин Куэйт и Кристофер Гербер создают
атомно-силовой микроскоп (АСМ), благодаря которому были преодолены присущие СТМ
ограничения. В свою очередь АСМ стал родоначальником широкого семейства
сканирующих зондовых устройств и использующих их технологий, которое продолжает
увеличиваться и посей день. В том же 1986 г. Г. Бинниг и Х. Рёрер были
удостоены Нобелевской премии в области физики за открытие принципа туннельной,
атомно-силовой и световой сканирующей микроскопии.
Изображения, получаемые с помощью
СЗМ, относятся к разряду создаваемых микроскопическими методами образов,
которые достаточно легко интерпретировать. В случае электронного или
оптического микроскопа принцип получения изображения базируется на сложных
электромагнитных дифракционных эффектах. Поэтому иногда могут возникнуть
затруднения при определении, является ли некоторый элемент микрорельефа
поверхности выступом или впадиной. Напротив, СЗМ регистрирует истинно
трехмерные параметры. На СЗМ - изображении выступ однозначно предстает
выступом, а впадина ясно видна как впадина. На получаемых при помощи оптических
или электронных микроскопов изображениях, например, плоского образца,
состоящего из чередующихся отражающих и поглощающих участков, могут возникать
искусственные изменения контрастности. Атомно-силовой микроскоп, в свою
очередь, практически безразличен к изменениям оптических или электронных
свойств и дает информацию об истинной топографии поверхности.
В настоящее время существуют
приборы, позволяющие отображать отдельные атомы: полевой ионный микроскоп и
просвечивающий электронный микроскоп высокого разрешения. Однако оба они имеют
существенные ограничения по применимости, связанные со специфическими
требованиями к форме образцов. В первом случае образцы должны иметь форму
острых игл из проводящего материала с радиусом закругления не более 100 А, а во
втором - форму тонких плёнок толщиной менее1000 А.
Сканирующая зондовая микроскопия
охватывает в настоящее время широкий спектр методов исследования поверхности.
Среди них - СТМ, АСМ, сканирующая микроскопия ближнего светового поля и ряд
других методов.
СЗМ эффективно используется для
исследований в различных областях науки и техники: в биологии и медицине, в
материаловедении, в исследованиях различных покрытий и тонких пленок,
полимерных и наноструктурированных материалов, в химии и химической
промышленности, физике и т.д.
Главным достоинством современных СЗМ
являются: возможность получения достоверных данных о высоте микрорельефа,
отсутствие дополнительных промежуточных процедур (напыление, изготовление реплик),
снижающих достоверность результатов; возможность получения нанометрового, а
иногда и ангстремного разрешения на воздухе. Кроме того, наряду с исследованием
рельефа АСМ позволяет изучать различные локальные свойства поверхности:
фрикционные, адгезионные, механические, электрофизические, магнитные и другие.
Также АСМ используется для локальной модификации структуры и свойств
поверхности.
Последнее десятилетие в
экспериментальной физике характеризуется интенсивным развитием принципиально
новых методов изучения поверхностей с нанометровым и атомарным пространственным
разрешением. В настоящее время эти методы объединены под общим названием -
сканирующая зондовая микроскопия (СЗМ). Этот термин относится к любым типам
микроскопов, в которых изображение формируется за счёт перемещения
(сканирования) острого микрозонда (иглы) над исследуемой поверхностью.
Родоначальником таких приборов является сканирующий туннельный микроскоп (СТМ).
. Сканирующая зондовая микроскопия
.1 Теоретические основы СЗМ
Для детального исследования
поверхности твердых тел существует много разнообразных методов. Микроскопия,
как средство получения увеличенного изображения, зародилась еще XV в. когда
впервые были изготовлены простые увеличительные стекла для изучения насекомых.
В конце XVII в. Антонио ван Левенгук изготовил оптический микроскоп, который
позволял установить существование отдельных клеток, болезнетворных микробов и
бактерий. Уже в 20 веке были разработаны методы микроскопии с помощью
электронных и ионных пучков.
Во всех описанных методах
применяется следующий принцип: освещение исследуемого объекта потоком частиц и
его последующее преобразование. В сканирующей зондовой микроскопии использован
другой принцип - вместо зондирующих частиц в ней используется механический зонд,
игла. Образно выражаясь, можно сказать, что, если в оптическом или электронном
микроскопах образец осматривается, то в СЗМ - ощупывается.
Другим важным принципом, отраженным
в названии метода СЗМ, является принцип сканирования, т.е. получение не
усредненной информации об объекте исследования, а дискретное (от точки к точке,
от линии к линии) перемещение зонда и считывание информации в каждой точке.
Общая конструкция сканирующего
зондового микроскопа представлена на рис 1.
Виды сенсоров.
В основе сканирующей зондовой
микроскопии лежит детектирование локального взаимодействия, возникающего между
зондом и поверхностью исследуемого образца при их взаимном сближении до
расстояния ~λ, где
λ- характерная длина
затухания взаимодействия «зонд-образец». В зависимости от природы
взаимодействия «зонд-образец» различают: сканирующий туннельный микроскоп (СТМ,
детектируется туннельный ток), сканирующий силовой микроскоп (ССМ,
детектируется силовое взаимодействие), ближнепольный сканирующий оптический
микроскоп (БСОМ, детектируется электромагнитное излучение) и т.п. Сканирующая
силовая микроскопия в свою очередь подразделяется на атомно-силовую микроскопию
(АСМ), магнитно-силовую микроскопию (МСМ), электро-силовую микроскопию (ЭСМ) и
другие, в зависимости от вида силового взаимодействия.
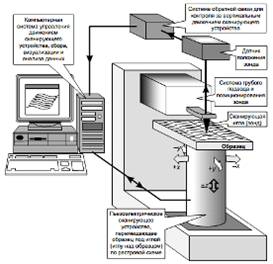
Рис. 2. Обобщенная функциональная схема
сканирующего зондового микроскопа
При измерении туннельного тока в
туннельном сенсоре (рис. 2) используется преобразователь ток-напряжение (ПТН),
включенный в цепь протекания тока между зондами образцом. Возможны два варианта
включения: с заземленным зондом, когда напряжение смещения подается на образец
относительно заземленного зонда или с заземленным образцом, когда напряжение
смещения прикладывается к зонду относительно образца.
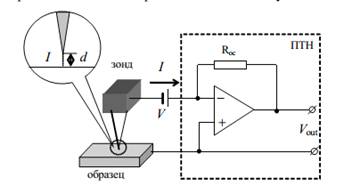
Рис. 2. Схема туннельного сенсора
Традиционным датчиком силового
взаимодействия является кремниевая микробалка, консоль или кантилевер (от англ.
cantilever - консоль) с оптической схемой регистрации величины изгиба
кантилевера, возникающего вследствие силового взаимодействия между образцом и
зондом, расположенным на конце кантилевера (рис. 3).
Различают контактный, неконтактный и
прерывисто-контактный («полуконтактный») способы проведения силовой
микроскопии. Использование контактного способа предполагает, что зонд упирается
в образец. При изгибе кантилевера под действием контактных сил отраженный от
него луч лазера смещается относительно центра квадрантного фотодетектора. Таким
образом, отклонение кантилевера может быть определено по относительному
изменению освещенности верхней и нижней половинок фотодетектора.
При использование неконтактного
способа зонд удален от поверхности и находится в области действия дальнодействующих
притягивающих сил. Силы притяжения и их градиенты слабее отталкивающих
контактных сил. Поэтому для их детектирования обычно используется модуляционная
методика. Для этого с помощью пьезовибратора кантилевер раскачивается по
вертикали на резонансной частоте. Вдали от поверхности амплитуда колебаний
кантилевера имеет максимальную величину. По мере приближения к поверхности
вследствие действия градиента сил притяжения резонансная частота колебаний
кантилевера изменяется, при этом уменьшается амплитуда его колебаний. Эта
амплитуда регистрируется с помощью оптической системы по относительному
изменению переменной освещенности верхней и нижней половинок фотодетектора.
При «полуконтактном» способе
измерений также применяется модуляционная методика измерения силового
взаимодействия. В «полуконтактном» режиме зонд частично касается поверхности,
находясь попеременно как в области притяжения, так и в области отталкивания.
Существуют и другие, более простые,
способы детектирования силового взаимодействия, при которых происходит прямое
преобразование силового взаимодействия в электрический сигнал. Один из таких
способов основан на использовании прямого пьезоэффекта, когда изгиб
пьезоматериала под действием силового взаимодействия приводит к появлению электрического
сигнала.
Пьезоэлектрический двигатель.
Сканеры.
Для контролируемого перемещения иглы
на сверхмалых расстояниях в СЗМ используются пьезоэлектрические двигатели. Их
задача - обеспечить прецизионное механическое сканирование зондом исследуемого
образца путем перемещения зонда относительно неподвижного образца или
перемещения образца относительно неподвижного зонда.
Работа большинства
пьезоэлектрических двигателей, применяемых в современных СЗМ, основана на
использовании обратного пьезоэффекта, который заключается в изменении размеров
пьезоматериала под действием электрического поля. Основой большинства
применяемых в СЗМ пьезокерамик является состав Pb(ZrTi)O3 (цирконат-титанат
свинца, ЦТС) с различными добавками.
Удлинение закрепленной с одного
конца пьезопластинки определяется выражением:

где - длина пластины,
h-толщина пластины, U - электрическое напряжение, приложенное к электродам,
расположенным на гранях пьезопластины,
- длина пластины,
h-толщина пластины, U - электрическое напряжение, приложенное к электродам,
расположенным на гранях пьезопластины, - пьезомодуль материала.
- пьезомодуль материала.
Существует много типов и
форм, в которых выпускаются пьезокерамические двигатели. Каждый имеет свой
уникальный пьезомодуль от 0,1 до 300 нм/В. Так, керамика с коэффициентом
расширения 0,1 нм/В позволяет получить перемещение 0,1 А при приложении
напряжения100 mV, что достаточно для получения атомного разрешения. Для
получения больших диапазонов сканирования (до нескольких сотен микрон)
используется пьезокерамика с большими значениями пьезомодуля.
Конструкции из
пьезокерамик, обеспечивающие перемещение по трем координатам x, y (в
латеральной плоскости образца) и z (по вертикали), называются «сканерами».
Существует несколько типов сканеров, наиболее распространенными из которых
являются треногий и трубчатый (рис. 4).
В треногом сканере перемещения по
трем координатам обеспечивают расположенные в ортогональную структуру три
независимые пьезокерамики.
Трубчатые сканеры работают
посредством изгиба полой пьезоэлектрической трубки в латеральной плоскости и
удлинения или сжатия трубки по оси z. Электроды, управляющие перемещениями
трубки в x и y направлениях, размещаются в виде четырех сегментов по наружной
поверхности трубки (рис. 4 б). Для изгиба трубки в направлении X, на +X
керамику подается напряжение для удлинения одной из ее сторон. Тот же самый
принцип используется для задания движения в направлении Y. Смещения в X и Y
направлениях пропорциональны приложенному напряжению и квадрату длины трубки.
Движение в Z направлении генерируется подачей напряжения на электрод в центре
трубки. Это приводит к удлинению всей трубки пропорционально ее длине и
приложенному напряжению.
Процесс сканирования поверхности в
СЗМ (рис. 5) имеет сходство сдвижением электронного луча по экрану в
электроннолучевой трубке телевизора. Зонд движется вдоль линии (строки) сначала
в прямом, а потом в обратном направлении (строчная развертка), затем переходит
на следующую строку (кадровая развертка). Движение зонда осуществляется
спомощью сканера небольшими шагами под действием пилообразных напряжений,
подаваемых с генератора развертки (обычно, цифро-аналогового преобразователя).
Регистрация информации о рельефе поверхности производится, как правило, на
прямом проходе.
К числу основных параметров,
выбираемых перед началом сканирования, относятся:
размер скана;
число точек на линии NX и линий в
скане NY, определяющие шаг сканирования ∆;
скорость сканирования.
Параметры сканирования выбираются
исходя из предварительных данных (размера характерных поверхностных
особенностей), которые имеются у исследователя об объекте исследования.
При выборе размера скана необходимо
получить наиболее полную информацию о поверхности образца, т.е. отобразить
наиболее характерные особенности его поверхности. Например, при сканировании
дифракционной решетки с периодом 3 мкм необходимо отобразить хотя бы несколько
периодов, т.е. размер скана должен составлять 10 - 15 мкм. В случае если
расположение особенностей на поверхности исследуемого объекта неоднородно, то
для достоверной оценки необходимо провести сканирование в нескольких отстоящих
друг от друга точках на поверхности образца. При отсутствии информации об объекте
исследования сначала, как правило, проводят сканирование в области, близкой к
максимально доступной для отображения, с целью получения обзорной информации о
характере поверхности. Выбор размера скана при повторном сканировании
осуществляют исходя из данных, полученных на обзорном скане.
Число точек сканирования (NX, NY)
выбирается таким образом, чтобы шаг сканирования ∆ (расстояние между
точками, в которых производится считывание информации о поверхности) был меньше
характерных ее особенностей, иначе произойдет потеря части информации,
заключенной между точками сканирования. С другой стороны, выбор излишнего
количества точек сканирования приведет к увеличению времени получения скана.
Скорость сканирования определяет
скорость движения зонда между точками, в которых производится считывание
информации. Излишне большая скорость может привести к тому, что система
обратной связи не будет успевать отводить зонд от поверхности, что приведет к
неправильному воспроизведению вертикальных размеров, а так же к повреждению
зонда и поверхности образца. Малая скорость сканирования приведет к увеличению
времени получения скана.
Система обратной связи.
В процессе сканирования зонд может
находиться над участками поверхности, имеющими различные физические свойства, в
результате чего величина и характер взаимодействия зонд-образец будут
изменяться. Кроме того, если на поверхности образца есть неровности, то при
сканировании будет изменяться и расстояние ∆Z между зондом и
поверхностью, соответственно будет изменяться и величина локального
взаимодействия.
В процессе сканирования производится
поддержание постоянной величины локального взаимодействия (силы или туннельного
тока) с помощью системы отрицательной обратной связи. При приближении зонда к
поверхности сигнал сенсора возрастает. Компаратор сравнивает текущий сигнал
сенсора с опорным напряжением Vs и вырабатывает корректирующий сигнал Vfb,
используемый в качестве управляющего для пьезопривода, который отводит зонд от
поверхности образца. Сигнал для получения изображения топографии поверхности
берется при этом из канала z - пьезопривода.
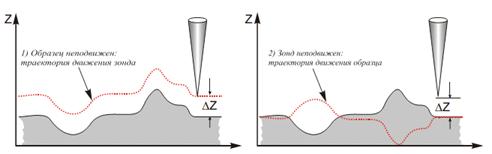

На рис. 6 показана траектория
движения зонда относительно образца (кривая2) и образца относительно зонда
(кривая1) при сохранении постоянной величины взаимодействия зонд-образец. Если
зонд оказывается над ямкой или областью, где взаимодействие слабее, то образец
приподнимается, в противном случае - образец опускается.
Отклик системы обратной связи на
возникновение сигнала рассогласования Vfb=V(t) - VS определяется константой
цепи обратной связи K или несколькими такими константами. Конкретные значения K
зависят от особенностей конструкции конкретного СЗМ (конструкции и
характеристик сканера, электроники), режима работы СЗМ (размера скана, скорости
сканирования и т.п.), а также особенностей исследуемой поверхности (степень
шероховатости, масштаб особенностей топографии, твердость материала и пр.).
В целом, чем больше значение K тем
точнее цепь обратной связи отрабатывает черты сканируемой поверхности и тем
достовернее данные, получаемые при сканировании. Однако при превышении
некоторого критического значения K система обратной связи проявляет склонность
к самовозбуждению, т.е. на линии скана наблюдается зашумленность.
Информация, полученная с помощью
сканирующего зондового микроскопа, хранится в виде СЗМ кадра- двумерного
массива целых чисел Zij (матрицы). Каждому значению пары индексов ij соответствует
определенная точка поверхности в пределах поля сканирования. Координаты точек
поверхности вычисляются с помощью простого умножения соответствующего индекса
на величину расстояния между точками, в которых производилось считывании
еинформации. Как правило, СЗМ кадры представляют собой квадратные матрицы,
имеющие размер 200x200 или 300х300 элементов.
Визуализация СЗМ кадров производится
средствами компьютерной графики, в основном, виде двумерных яркостных (2D) и
трехмерных (3D) изображений. При 2D визуализации каждой точке поверхности
Z=f(x,y) ставится в соответствие тон определенного цвета в соответствии с
высотой точки поверхности (рис. 7а). При 3D визуализации изображение
поверхности Z=f(x,y) строится в аксонометрической перспективе с помощью пикселей
или линий. Наиболее эффективным способом раскраски3D изображений является
моделирование условий подсветки поверхности точечным источником, расположенным
в некоторой точке пространства над поверхностью (рис. 7 б). При этом удается
подчеркнуть отдельные малые особенности рельефа.
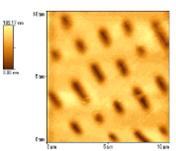
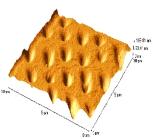
а) б)
Рис. 7. Способы графического
представления СЗМ - изображений:
а) - 2D, б) - 3D с боковой
подсветкой
сканирующий зондовый микроскопия
СЗМ изображения, наряду с полезной
информацией, содержат также много побочной информации, искажающей данные о
морфологии и свойствах поверхности. На рис. 8 схематически представлены
возможные искажения в СЗМ изображениях поверхности, обусловленные не
идеальностью аппаратуры и внешними паразитными воздействиями.

Рис. 8. Возможные искажения в СЗМ
изображениях
СЗМ изображения, как правило,
содержат постоянную составляющую, которая не несет полезной информации о
рельефе поверхности, а отражает точность подвода образца в середину
динамического диапазона перемещений сканера по оси Z.Постоянная составляющая
удаляется из СЗМ кадра программным способом.
Изображения поверхности, получаемые
с помощью зондовых микроскопов, как правило, имеют общий наклон. Это может быть
обусловлено несколькими причинами. Во-первых, наклон может появляться
вследствие неточной установки образца относительно зонда или не плоско
параллельности образца; во-вторых, он может быть связан с температурным
дрейфом, который приводит к смещению зонда относительно образца; в-третьих, он
может быть обусловлен нелинейностью перемещений пьезосканера. На отображение
наклона тратится большой объем полезного пространства в СЗМ кадре, так что
становятся невидны мелкие детали изображения. Для устранения данного недостатка
производят операцию вычитания постоянного наклона (левелинга) (рис. 9).

Рис. 9. Устранение постоянного
наклона из СЗМ - изображения
Не идеальность свойств пьезосканера
приводит к тому, что СЗМ изображение содержит ряд специфических искажений. В
частности, поскольку движение сканера в плоскости образца влияет на положение
зонда над поверхностью (по оси Z), СЗМ изображения представляют собой
суперпозицию реального рельефа и некоторой поверхности второго (а часто и более
высокого) порядка. Для устранения искажений такого рода методом наименьших
квадратов находится аппроксимирующая поверхность второго порядка, имеющая
минимальные отклонения от исходной поверхности, и затем данная поверхность
вычитается из исходного СЗМ изображения.
Шумы аппаратуры, нестабильности
контакта зонд-образец при сканировании, внешние акустические шумы и вибрации
приводят к тому, что СЗМ изображения, наряду с полезной информацией, имеют
шумовую составляющую. Частично шумы СЗМ изображений могут быть удалены
программными средствами с помощью применения различных фильтров.
.2 Сканирующие туннельные микроскопы
Основными методами СТМ являются
методы Постоянной Тока и Постоянной Высоты для получения данных о рельефе,
дополняемые Методиками Спектроскопических измерений для получения распределений
«работы выхода» («высоты барьера») и «локальной плотности состояний» (ЛПС),
I(z) и I(V) кривые отображают химические и электронные свойства поверхности.
СТМ - метод постоянной тока (МПТ)
предполагает поддержание в процессе сканирования постоянной величины
туннельного тока с помощью системы обратной связи. При этом вертикальное
смещение сканера (сигнал обратной связи) отражает рельеф поверхности. Скорость
сканирования в МПТ ограничивается использованием системы обратной связи.
Большие скорости сканирования могут быть достигнуты при использовании Метода
Постоянной Высоты (МПВ), однако МПТ позволяет исследовать образцы с развитым
рельефом. 4
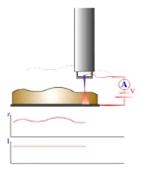
Рис.10. Обобщенная схема метода
постоянного тока
При использовании СТМ - метода
постоянной высоты (МПВ) сканер СТМ перемещает зонд только в плоскости, так что
изменения тока между острием зонда и поверхностью образца отражают рельеф
поверхности. Поскольку по этому методу нет необходимости отслеживать зондом
расстояние до поверхности образца, скорости сканирования могут быть более
высокими. МПВ может быть применен, таким образом, к образцам с очень ровной
поверхностью, поскольку неоднородности поверхности выше 5-10 А будут приводить
к разрушению кончика зонда.
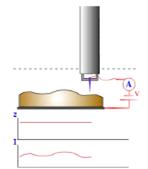
Рис.11. Обобщенная схема метода
постоянной высоты
СТМ - отображение работы выхода -
получается путем поточечного измерения логарифмических изменений туннельного тока
при изменении расстояния зонд-образец, т.е. наклона кривой зависимости log I от
z. При проведении измерений ЛВБ расстояние зонд-образец варьируется
синусоидально, например, путем приложения дополнительного переменного
напряжения к сигналу обратной связи, подаваемому на z-секцию пьезосканера.
Частота модуляции выбирается много большей полосы пропускания системы обратной
связи СТМ.
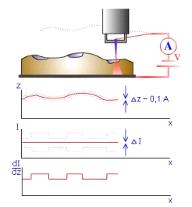
Рис.12. СТМ - отображение работы
выхода
СТМ - отображение плотности
состояний основывается на том, что измеряемый в СТМ ток определяется процессами
туннелирования через зазор зонд-поверхность образца его величина зависит не
только от высоты барьера, но также и от плотности электронных состояний.
Соответственно получаемые в СТМ изображения являются не просто изображениями
рельефа поверхности образца, на эти изображения может сильно влиять
распределение плотности электронных состояний по поверхности образца.
Определение ЛПС может также помочь в различении химической природы
поверхностных атомов. Метод основывается на измерении распределения ЛПС и
производится одновременно с получением СТМ изображения. В процессе сканирования
напряжение смещения модулируется на величину dU. Частота модуляции выбирается
много большей полосы пропускания системы обратной связи СТМ. Результирующая
модуляция туннельного тока dI измеряется, делится на dU и результат
представляется в качестве ЛПС изображения.
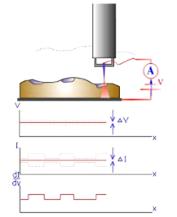
Рис.13. СТМ - отображение плотности
состояний
Характерные величины туннельных
токов при СТМ, регистрируемых в процессе измерений, являются достаточно малыми
- вплоть до 0,03 нA (а со специальными измерительными СТМ головками - до 0,01
нA), что позволяет также исследовать плохо проводящие поверхности, в частности,
биологические объекты. Среди недостатков СТМ можно упомянуть сложность
интерпретации результатов измерений некоторых поверхностей, поскольку СТМ
изображение определяется не только рельефом поверхности, но также и плотностью
состояний, величиной и знаком напряжения смещения, величиной тока. Например, на
поверхности высоко ориентированного пиролитического графита (ВОПГ) можно видеть
обычно только каждый второй атом. Это связано со спецификой распределения
плотности состояний (рис.14).
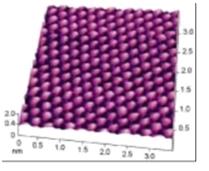
Рис. 14. Атомарное разрешение на
ВОПГ
СТМ способен формировать изображения
отдельных атомов на поверхностях металлов, полупроводников и других проводящих
образцов путем сканирования образца остроконечной иглой на высоте порядка
нескольких атомных диаметров, так что между острием и образцом протекает
туннельный ток. Преимуществами являются возможность получения сверхвысоких
(атомарных) разрешений (рис.14), недостатками - возможность работы только с
проводящими образцами, высокие требования к чистоте поверхности.
Режим спектроскопии (ССМ) может быть
использован не только в качестве инструмента для получения рельефа поверхности,
но также и для картирования ряда других характеристик и материальных свойств
образца, в честности, зарядовой плотности, адгезии и упругости, а также сил
разрыва связей лиганд-рецептор. ССМ может быть использован также в качестве
инструмента силовой спектроскопии - для измерений зависимости сил от
расстояния. Для колеблющегося кантилевера сила взаимодействия зонд-поверхность
может оказывать влияние также и на некоторые другие характеристики - амплитуду,
частоту, фазу, добротность и т.д. Соответствующие зависимости этих характеристик
от расстояния могут также рассматриваться как спектроскопические данные.
Спектроскопические
измерения Локальной Высоты Барьера (ЛВБ спектроскопия) позволяет получать
информацию о пространственном распределении микроскопической работы выхода
поверхности, как описывается ниже. Туннельный ток  в СТМэкспоненциально
затухает с расстоянием зонд-образец z как
в СТМэкспоненциально
затухает с расстоянием зонд-образец z как где константа затухания
k определяется выражением
где константа затухания
k определяется выражением
При отображении ЛВБ мы
измеряем чувствительность туннельного тока к вариациям расстояния зонд-образец
в каждом пикселе СТМ изображения. Получаемая по этому методу ЛВБ является так
называемой видимой высотой барьера U.
Эта величина U обычно
сравнивается со средней работой выхода Uav = (Up + Us)/2, где Up и Us являются
работами выхода материала зонда и образца соответственно. Во многих случаях
экспериментальная величина U не равна в точности Uav но является меньшей
величиной. Тем не менее, известно, что величина U близка к локальному
поверхностному потенциалу (локальной работе выхода) и является его хорошей
мерой.
СТМ - I(z) спектроскопия
измеряет туннельный ток в зависимости от расстояния зон - образец в каждой
точке СТМ изображения. Для Uav= I eV 2k = 1.025 A-IeV-I. Резкая зависимость
I(z) помогает определить качество острия зонда. Как установлено эмпирически
если туннельный ток IT падает в два раза при Z < 3 A, то острие рассматривается
как очень хорошее, если при Z < 10 A, то использование острия возможно для
получения атомарного разрешения на ВОПГ. Если же ток спадает в два раза при Z
> 20 A, то зонд не может быть использован и должен быть заменен.

Рис. 15. СТМ - I(z)
спектроскопия
СТМ - I(v) спектроскопия
(or Current Imaging Tunneling Spectroscopy, CITS) предполагает одновременное
получение обычного изображения рельефа при фиксированных значениях тока Io и
напряжения смещения Vo. В каждой точке изображения обратная связь разрывается,
и напряжение смещения проходит ряд значений Vi при этом записываются
соответствующие значения тока Ii. Затем напряжение возвращается к Vo и обратная
связь включается снова.
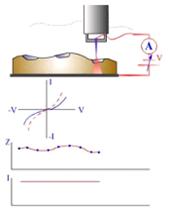
Рис. 16. СТМ - I(v)
спектроскопия
Каждая I-V кривая может
быть получена за несколько миллисекунд, так что дрейф положения зонда не
оказывает существенного влияния. Эта процедура генерирует полное токовое
изображение Ii(x,y) для каждого значения напряжения Vi в дополнение к
изображению рельефа z(x,y)|VoIo. CITS значения могут быть использованы для
расчета токового разностного изображения DIVi, Vj(x,y) где Vi и Vj ограничивают
частные поверхностные состояния, производя реальное пространственное
отображение поверхностных состояний с атомарным разрешением. Эта методика может
быть использована, например, в сверхвысоком вакууме для отображения заполненных
состояний адатомов или ненасыщенных связей для реконструкций кремния.
1.3 Атомно-силовая
микроскопия
В реальных условиях (в
условиях окружающей атмосферы) в воздухе практически всегда присутствует
некоторая влажность и на поверхностях образца и иглы присутствуют слои
адсорбированной воды. Когда кантилевер достигает поверхности образца возникают
капиллярные силы, которые удерживают иглу кантилевера в контакте с поверхностью
и увеличивают минимально достижимую силу взаимодействия. Электростатическое
взаимодействие между зондом и образцом может проявляться довольно часто. Оно
может быть как притягивающим, так и отталкивающим. Ван дер Ваальсовы силы
притяжения, капиллярные, электростатические и силы отталкивания в точке, где
зонд касается образца, в равновесии уравновешиваются силой, действующей на
кончик зонда со стороны изогнутого кантилевера. Недостатки туннельного режима
были преодолены с изобретением Биннигом атомно-силового микроскопа.
При взаимодействии с
поверхностью образца макроскопическая гибкая консоль (кантилевер) с острой
иглой под действием атомных сил может быть изогнута на достаточно большую
величину, чтобы быть измеренной с помощью обычных средств. При работе в
Контактном методе изгиб кантилевера отражает отталкивающую силу и используется
непосредственно, в системе обратной связи или в их комбинации для отображения
рельефа поверхности.
Наряду с отображением
рельефа в процессе сканирования могут отображаться и другие характеристики
исследуемого образца. Если кантилевер с зондом являются проводящими, появляется
возможность отображения сопротивления растекания образца. Если сканирование
проводится в направлении перпендикулярном продольной оси кантилевера (в
латеральном направлении), силы трения вызывают его скручивание. Измеряя это
скручивание с помощью четырех секционного фотодетектора можно одновременно с
отображением рельефа отображать также и распределение сил трения по поверхности
образца.
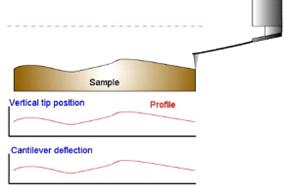
Рис. 17. АСМ - метод
постоянной высоты
Сила отталкивания F
действующая на зонд связана с величиной отклонения кантилевера x законом Гука:
F = -kx, где k является жесткостью кантилевера. Величина жесткости для
различных кантилеверов варьируется от 0.01 до нескольких Н/м. Основным
достоинством метода постоянной высоты является высокая скорость сканирования.
Она ограничивается практически только резонансными свойствами кантилевера.
К недостаткам метода
постоянной высоты относится требование достаточной гладкости поверхности
образцов. Достаточно мягкие образы (подобно полимерам, биологическим объектам,
ЛБ - пленкам и т.д.) при исследованиях могут разрушаться (процарапываться), поскольку
зонд находится в непосредственном механическим контакте с поверхностью. При
сканировании относительно мягких образцов с развитой поверхностью сила давления
зонда на поверхность варьируется, одновременно неравномерно прогибается и
поверхность образца. В результате полученный рельеф поверхности может быть
искажен. Возможное наличие существенных капиллярных сил, обусловленных наличием
слоя воды, также приводит к ухудшению разрешения.
При использовании АСМ -
метода постоянной силы величина изгиба кантилевера поддерживается в процессе
сканирования постоянной при помощи системы обратной связи. Таким образом,
вертикальные смещения сканера отражают рельеф поверхности исследуемого образца.
Основным достоинством
метода постоянной силы является возможность наряду с измерениями рельефа
поверхности проводить измерения и других характеристик - сил трения,
сопротивления растекания и др.
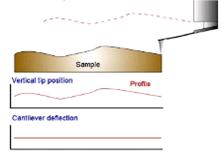
Рис. 18. АСМ - метод
постоянной силы
АСМ - контактный метод
рассогласования может рассматриваться как промежуточный между методом
постоянной силы и методом постоянной высоты, если коэффициент усиления системы
обратной связи (т.е. скорость отработки сигнала рассогласования)
устанавливается таким, чтобы система была способна отрабатывать относительно
гладкие особенности рельефа и в то же время быть достаточно медленной, чтобы
отрабатывать крутые ступеньки. В результате сигнал рассогласования будет плохо
отображать гладкие особенности рельефа и с высоким контрастом отображать резкие
шероховатости. Такой способ отображения может быть полезным для поиска
небольших неоднородностей на большом относительно гладком фоне.
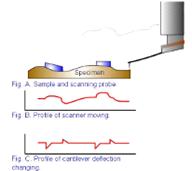
Рис. 19. АСМ -
контактный метод рассогласования
АСМ - метод латеральных
сил позволяет различать области с различными коэффициентами трения, а также
подчеркивать особенности рельефа поверхности. Эти возможности могут быть
использованы одновременно с получением рельефа поверхности для более полной
характеризации исследуемого образца. При сканировании гладкой поверхности с
участками с различными коэффициентами трения угол скручивания меняется на
каждом участке. Это позволяет проводить измерения локальной силы трения. Если
же поверхность не гладкая, то такая интерпретация затруднена. Для того, чтобы
различить участки с различными коэффициентами трения и неоднородности рельефа
необходимо использовать второй проход в противоположном направлении. Кроме того
измерения латеральных сил позволяют относительно просто достигать атомарного
разрешения на слюде и на других слоистых материалах. Метод латеральных сил
имеет важное значение при исследовании полупроводников, полимеров, пленочных
покрытий, запоминающих сред, при изучениях поверхностных загрязнений,
химических особенностей и фрикционных характеристик, а также постоянно растущий
ряд новых применений. Физические основы метода латеральных сил заключаются в
следующем. При сканировании по методу постоянной силы перпендикулярно
продольной оси кантилевера помимо изгиба кантилевера в нормальном направлении
происходит также и его торсионный изгиб. Он обусловлен моментом силы
действующей на зонд. Для малых отклонений угол закручивания пропорционален
поперечной (латеральной) силе. Торсионное закручивание кантилевера измеряется
оптической следящей системой микроскопа.
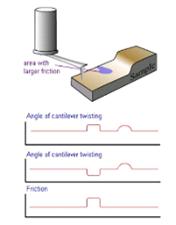
Рис. 20. АСМ - метод
латеральных сил
АСМ - отображение
сопротивления растекания возможно при использовании проводящего зонда АСМ,
находящегося в контакте с поверхностью образца. К зонду прикладывается
напряжение - смещение и проводятся измерения результирующего тока через образец
в зависимости от положения зонда одновременно с получением данных о рельефе по
методу постоянной силы. При постоянном контактном сопротивлении
зонд-поверхность при заданном смещении величина тока пропорциональна локальному
сопротивлению исследуемого образца. Отображение сопротивления растекания может
быть также использовано и при анализе сложных структур, таких как интегральные
схемы.
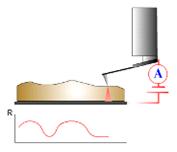
Рис. 21. АСМ -
отображение сопротивления растекания.
АСМ - контактная
емкостная микроскопия (КЕМ) - в процессе проведения контактной емкостной
микроскопии определяется изменение реакции зонда над поверхностью образца при
приложении различных напряжений. В результате строится относительная
характеристика изменения поверхностной емкости. КЕМ позволяет определять зоны с
различной электрической емкостью, такие как зоны различной степени легирования
в полупроводнике.
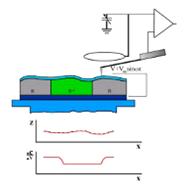
Рис. 22. АСМ -
контактная емкостная микроскопия
Кs = Кс· (Dz/D - 1)
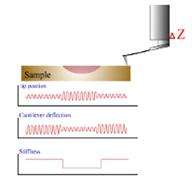
Рис. 23. АСМ - метод
модуляции силы
В свою очередь при
известной локальной жесткости можно определить модуль упругости образца. Это
может быть сделано с использованием калибровочных измерений или с
использованием модели Герца. Методы модуляции силы широко используется при
исследованиях полимеров, полупроводников, биообъектов, в особенности при
исследованиях композитов.
АСМ - полуконтактные
методы основаны на использование колеблющегося кантилевера в Сканирующей
Силовой Микроскопии впервые было предложено Биннигом. Он показал влияние градиентов
сил на сдвиг резонансной частоты кантилевера и возможность бесконтактного
сканирования поверхности образца. Была найдена возможность сканирования
поверхности образца не только в притягивающих, но и в отталкивающих силах.
Относительно слабый сдвиг частоты колебаний под влиянием отталкивающих сил
означает, что контакт зонда с поверхностью образца в процессе колебаний не
является постоянным. Только в течение короткой части периода колебаний зонд
«ощущает» контактные отталкивающие силы. Особенно это касается колебаний с
большой амплитудой. Сканирование поверхности образца с колеблющимся таким
образом кантилевером является не бесконтактным, а скорее прерывисто-контактным.
Соответствующий метод сканирующей силовой микроскопии (Прерывисто-контактный
или "Полуконтактный" метод) довольно часто используется на практике.
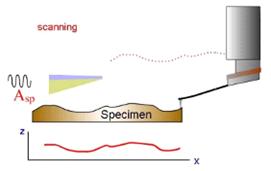
Рис. 24. АСМ -
полуконтактные методы
Полуконтактный метод
обладает определенными преимуществами по сравнению контактными методами. Прежде
всего, при использовании этого метода давление кантилевера на поверхность
образца существенно меньше, что позволяет работать с более мягкими и легко
разрушающимися материалами, такими как полимеры и биоматериалы.
"Полуконтактный" метод также более чувствителен к различным взаимодействиям
с поверхностью, что дает возможность определить ряд характеристик поверхности -
распределение вязкости и упругости, электрических и магнитных доменов
АСМ - метод отображения
фазы - когда в процессе колебаний кончик зонда касается поверхности образца, он
испытывает не только отталкивающие, но и адгезионные, капиллярные и ряд других
сил. В результате взаимодействия зонда с поверхностью образца происходит сдвиг
фазы колебаний. Если поверхность образца является неоднородной по своим
свойствам, соответствующим будет и фазовый сдвиг. Распределение фазового сдвига
по поверхности будет отражать распределение характеристик материала образца.
Позволяет получать информацию в широкой области применений: для исследований
биологических объектов, образцов с магнитными и электрическими
характеристиками, и др.
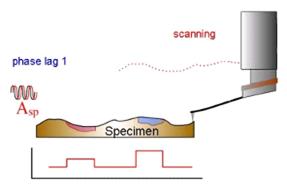
Рис. 25. Метод
отображения фазы
Широко используемый
прерывисто-контактный ("полуконтактный"). Метод обладает
определенными недостатками, связанными с использованием системы обратной связи.
Скорость сканирования в "полуконтактном" методе ограничивается
временем срабатывания обратной связи. Однако, в результате правильного подбора
коэффициента усиления обратной связи этот недостаток может быть устранен. Также
возможна настройка для оптимального отображения пологих и незначительных
изменений рельефа.
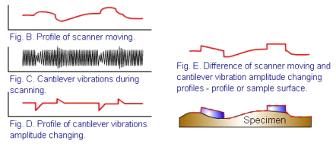
Рис. 26. АСМ -
полуконтактный метод рассогласования
АСМ - бесконтактные
методы - Бесконтактная ССМ (БК ССМ), предложенная в 1987 г., обладает
уникальными возможностями по сравнению другими методами зондовой микроскопии,
такими как Контактная ССМ и СТМ. Отсутствие сил отталкивания в БК ССМ позволяет
использовать ее в исследованиях «мягких образцов», при этом в БК ССМ, в отличие
от СТМ, не требуется наличие проводящих образцов. БК ССМ использует принцип
определения «модуляции амплитуды». Соответствующая измерительная схема
использует изменения амплитуды колебаний кантилевера (A), обусловленные
взаимодействием зонда с образцом. Работа по методу БК ССМ может быть описан в
терминах градиентно-силовой модели. В соответствии с этой моделью в пределе
малых A при приближении кантилевера к образцу резонансная частота кантилевера  сдвигается на величину
сдвигается на величину  к своему новому
значению в соответствии с выражением
к своему новому
значению в соответствии с выражением
где  есть новое значение
резонансной частоты кантилевера с номинальной величиной жесткости
есть новое значение
резонансной частоты кантилевера с номинальной величиной жесткости  , а
, а  - градиента силы
взаимодействия кантилевера с образцом. Величина z представляет эффективный
зазор зонд-образец, для случая сил притяжения величина
- градиента силы
взаимодействия кантилевера с образцом. Величина z представляет эффективный
зазор зонд-образец, для случая сил притяжения величина
 отрицательна.
отрицательна.
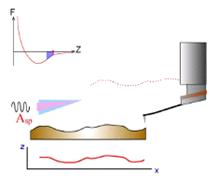
Рис. 27. АСМ -
бесконтактные методы
Если возбуждающая
частота колебаний кантилевера  , то сдвиг резонансной
частоты в сторону меньших значений приводит к уменьшению амплитуды колебаний
, то сдвиг резонансной
частоты в сторону меньших значений приводит к уменьшению амплитуды колебаний  кантилевера с частотой при приближении к
образцу. Эти изменения амплитуды A используются в качестве входного сигнала в
системе обратной связи. Для получения сканированного изображения по методу БК
ССМ необходимо, прежде всего, выбрать некую амплитуду Aset в качестве уставки,
при этом Aset < A(fset) когда кантилевер находится вдали от поверхности
образца. Система обратной связи подводит кантилевер поближе к поверхности, пока
его мгновенная амплитуда A не станет равной амплитуде Aset при заданной частоте
возбуждения колебаний . Начиная с этой точки
может начаться сканирование образца в x-y плоскости с удержанием системой
обратной связи A = Aset = constant для получения БК ССМ изображения. Система
обратной связи подводит кантилевер ближе к образцу (в среднем) если Aset
уменьшается в какой-либо точке, и отодвигает кантилевер от образца (в среднем)
если Aset увеличивается. В целом, как следствие вышеизложенной модели в пределе
малых A сканированное изображение может рассматриваться как рельеф постоянного
градиента силы взаимодействия зонд-образец. Метод БК ССМ обладает тем
преимуществом, что зонд не контактирует с образцом и поэтому не разрушает его и
не искажает его изображения. В частности, это может быть важным при
исследовании биологических образцов.
кантилевера с частотой при приближении к
образцу. Эти изменения амплитуды A используются в качестве входного сигнала в
системе обратной связи. Для получения сканированного изображения по методу БК
ССМ необходимо, прежде всего, выбрать некую амплитуду Aset в качестве уставки,
при этом Aset < A(fset) когда кантилевер находится вдали от поверхности
образца. Система обратной связи подводит кантилевер поближе к поверхности, пока
его мгновенная амплитуда A не станет равной амплитуде Aset при заданной частоте
возбуждения колебаний . Начиная с этой точки
может начаться сканирование образца в x-y плоскости с удержанием системой
обратной связи A = Aset = constant для получения БК ССМ изображения. Система
обратной связи подводит кантилевер ближе к образцу (в среднем) если Aset
уменьшается в какой-либо точке, и отодвигает кантилевер от образца (в среднем)
если Aset увеличивается. В целом, как следствие вышеизложенной модели в пределе
малых A сканированное изображение может рассматриваться как рельеф постоянного
градиента силы взаимодействия зонд-образец. Метод БК ССМ обладает тем
преимуществом, что зонд не контактирует с образцом и поэтому не разрушает его и
не искажает его изображения. В частности, это может быть важным при
исследовании биологических образцов.
.4 Ближнепольная
оптическая микроскопия (СБОМ)
Традиционные методы
получения оптических изображений объектов
имеют существенные
ограничения, связанные с дифракцией света. Одним из основополагающих законов
оптики является существование так назы-ваемого дифракционного предела, который
устанавливает минимальный размер(R) объекта, изображение которого может быть
построено оптической системой при использовании света с длиной волны λ:

где n- показатель
преломления среды. Для оптического диапазона длин волн предельный размер
составляет величину порядка200÷300 нм.
В ближнепольной оптической микроскопии используются другие принципы построения
изображения объекта, которые позволяют преодолеть трудности, связанные с
дифракцией света, и реализовать пространственное разрешение на уровне10 нм и
лучше.
Идея СБОМа была
предложена в1928 году Сингхом (E.H. Syngh), но она намного опередила
технические возможности своего времени и осталась практически незамеченной. Ее
первое подтверждение было получено Эшем (E.A. Ash) в опытах с микроволнами
в1972 году. Сканирующий ближнепольный оптический микроскоп был изобретен
Дитером Полем (лаборатория фирмыIBM, г. Цюрих, Швейцария) в 1982 году сразу
вслед за изобретением туннельного микроскопа. В основе работы данного прибора
используется явление прохождения света через субволновые диафрагмы (отверстия с
диаметром много меньше длины волны падающего излучения).
Рис. 28. (а) -
Прохождение света через отверстие в экране с субволновой апертурой. (б) - Линии
постоянной интенсивности оптического излучения в области субволнового отверстия
При прохождении света
через субволновое отверстие наблюдается ряд особенностей. Электромагнитное поле
в области диафрагмы имеет сложную структуру. Непосредственно за отверстием на
расстояниях Z < 100а располагается так называемая ближняя зона, в которой
электромагнитное поле существует, в основном, в виде эванесцентных (не
распространяющихся) мод, локализованных вблизи поверхности диафрагмы. В области
расстояний Z > 100a располагается дальняя зона, в которой наблюдаются лишь
излучательные моды. Мощность излучения за субволновой диафрагмой в дальней зоне
может быть оценена по следующей формуле:
где k - волновой вектор,
 - плотность мощности
падающего излу-чения. Оценки показывают, что для излучения с длиной волны
порядка λ = 500 нм и диафрагмы с отверстием ~ 5 нм мощность излучения в
дальней зоне составляет по порядку величин 10-10 от мощности падающего
излучения. Поэтому, на первый взгляд, кажется, что использование малых
отверстий для построения растровых оптических изображений исследуемых образцов
практически невозможно. Однако, если поместить исследуемый объект
непосредственно за отверстием в ближней зоне, то вследствие взаимодействия
эванесцентных мод с образцом часть энергии электромагнитного поля переходит в
излучательные моды, интенсивность которых может быть зарегистрирована
оптическим фотоприемником. Таким образом, ближнепольное изображение формируется
при сканировании исследуемого образца диафрагмой с субволновым отверстием и
регистрируется в виде распределения интенсивности оптического излучения в
зависимости от положения диафрагмы I(x,y). Контраст на СБОМ изображениях
определяется процессами отражения, преломления, поглощения и рассеяния света,
которые, в свою очередь, зависят от локальных оптических свойств образца.
- плотность мощности
падающего излу-чения. Оценки показывают, что для излучения с длиной волны
порядка λ = 500 нм и диафрагмы с отверстием ~ 5 нм мощность излучения в
дальней зоне составляет по порядку величин 10-10 от мощности падающего
излучения. Поэтому, на первый взгляд, кажется, что использование малых
отверстий для построения растровых оптических изображений исследуемых образцов
практически невозможно. Однако, если поместить исследуемый объект
непосредственно за отверстием в ближней зоне, то вследствие взаимодействия
эванесцентных мод с образцом часть энергии электромагнитного поля переходит в
излучательные моды, интенсивность которых может быть зарегистрирована
оптическим фотоприемником. Таким образом, ближнепольное изображение формируется
при сканировании исследуемого образца диафрагмой с субволновым отверстием и
регистрируется в виде распределения интенсивности оптического излучения в
зависимости от положения диафрагмы I(x,y). Контраст на СБОМ изображениях
определяется процессами отражения, преломления, поглощения и рассеяния света,
которые, в свою очередь, зависят от локальных оптических свойств образца.
СБОМ позволяет решать
следующие задачи:
. Определять рельеф
исследуемого образца;
. Получать данные об
оптических свойствах поверхности образца (коэффициентах отражения и
пропускания, распределения люминесцентных характеристик);
. Проводить измерения
локальных спектральных характеристик;
. Выполнять
нанолитографические операции.
Все ближнепольные
микроскопы включают несколько базовых элементов конструкции:
. зонд;
. система перемещения
зонда относительно поверхности образца по2-м (X-Y) или 3-м (X-Y-Z)
координатам(система развертки);
. регистрирующая
система;
. оптическая система.
Исследование оптических
характеристик с разрешением ниже дифракционного предела производится с помощью
СБОМ измерительной головки с оптоволоконным зондовым датчиком, ввод излучения в
который осуществляется с помощью лазерного модуля. Выбор участка поверхности
образца для исследований и контроль процедуры подвода зонда к образцу
осуществляется с помощью системы видеонаблюдения. Конструкция сменного
основания позволяет наряду со СБОМ изображением получать и оптическое
изображение исследуемого образца с помощью инвертированного микроскопа.
Объектив инвертированного микроскопа располагается в сменном основании, в
котором встроены системы грубой и точной фокусировки, позволяющие использовать
высокоразрешающие объективы, в т.ч. иммерсионные. В сменном основании помимо
системы грубого ручного позиционирования образца содержится также система
точного XY позиционирования, также позволяющая осуществлять XY сканирование.
Получение высокого разрешения обеспечивается также использованием
виброизолирующей платформы с системой активной виброизоляции.
Оптический
инвертированный микроскоп позволяет получать наряду со СБОМ изображением также
и оптическое, визуально следить за процессом подвода зонда, а также снимать
оптический сигнал с помощью модуля ФЭУ.
Базовый блок Интегра
служит для установки на него сменного основания, а также подключения через него
измерительной головки и сменного основания к контроллеру.
В базовом блоке
расположен механизм подвода, обеспечивающий подвод объектива к образцу
автоматизировано, с помощью шагового двигателя, либо вручную.
Сканирующее сменное
основание служит для установки исследуемого образца, измерительной головки и
объектива инвертированного микроскопа.
Лазерный модуль
предназначен для ввода лазерного излучения в оптическое волокно. Используется
твердотельный лазер с длиной волны 488 нм.
СБОМ измерительная
головка предназначена для измерения рельефа поверхности образца и его
приповерхностных оптических характеристик, при этом в процессе измерений могут
регистрироваться амплитуда и фаза колебаний зонда.
Основной элемент любого
ближнепольного микроскопа - оптический зонд - оптоволоконный зондовый датчик,
представляющий собой аксиально-симметричный оптический волновод из материалов с
отличающимися показателями преломления (Рис. 30).
Рис. 30. Схематическое
изображение строения оптического волокна
Оптическое волокно
состоит из сердцевины (core) и оболочки (cladding). Снаружи волокно покрывается
защитным слоем. Сердцевина и оболочка изготавливаются, как правило, из особого
кварцевого стекла. При этом стекло, используемое для оболочки, имеет меньший
показатель преломления, чем стекло для сердцевины. (На практике показатель
преломления стекла регулируется с помощь легирующих добавок, так что коэффициенты
преломления сердцевины и оболочки различаются на величины порядка1%). Такая
система, вследствие явления полного внутреннего отражения, позволяет
локализовать оптическое излучение в области сердцевины и практически без потерь
транспортировать его на большие расстояния.
Датчик (Рис. 31) состоит
из следующих основных частей: кварцевого резонатора 1, приклеенного к нему
одномодового оптического волокна 2 и текстолитового основания с контактными
площадками 3. Конец оптического волокна, который крепится к кварцевому
резонатору клеевым соединением, заострен до образования острия с радиусом
закругления порядка 50-100 нм. На этот конец напылен слой металла таким
образом, чтобы на острие остался чистый участок с апертурой диаметром 50-100
нм. Датчиком, используемым для контроля расстояния между зондом и образцом,
является U-образный (камертонного типа) кварцевый резонатор, к одному из плеч
которого приклеен заостренный конец оптического волокна таким образом, что он
выступает на 0.5-1.0 мм. Именно между этим заостренным концом и исследуемой
поверхностью осуществляется силовое взаимодействие. Сигнал, вырабатываемый
кварцевым резонатором, снимается через контактные площадки.
Конструкция такого зонда
позволяет локализовать электромагнитное поле в области пространства с размерами
меньше длины волны используемого излучения.
На сегодняшний день
существует несколько схем реализации ближнепольного оптического микроскопа.
Наиболее широкое применение нашли СБОМ с зондами на основе оптического волокна,
такие зонды изготавливаются следующим образом. Очищенный от защитного слоя
конец оптического волокна погружается в раствор, состоящий из двух
несмешивающихся жидкостей - смеси HF, NH4F, H2O, которая является травителем
для кварца, и жидкости с меньшей плотностью, например, толуола. Толуол
располагается поверх травителя и служит для формирования мениска смачивания на
границе толуол - травитель - волокно (Рис. 32 а). По мере травления толщина
волокна уменьшается, что приводит к уменьшению высоты мениска. В результате в
процессе травления на конце волокна происходит формирование конусообразного
острия (Рис. 32 б) с характерными размерами меньше 100 нм. Затем кончик зонда
покрывается тонким слоем металла. Покрытие наносится с помощью вакуумного
напыления под углом порядка 30º к оси волокна,
так что на кончике острия в области тени остается не запыленный участок малой
апертуры, который и является ближнепольным источником излучения. Оптимальный
угол при вершине зондов составляет порядка20º.
Рис. 32. Изготовление
СБОМ зондов на основе оптического волокна: (а) -химическое травление
волокна;(б) - вид кончика волокна после травления; (в) - напыление тонкой
пленки металла
Рассмотрим СБОМ на
примере Интегра Соларис. Оптоволоконный зондовый датчик устанавливается на
сканере, расположенном внутри измерительной головки. В место крепления
зондового датчика на сканере располагается пьезодрайвер, колеблющийся на
резонансной частоте системы зонд - кварцевый резонатор - держатель зонда. С
контактов кварцевого резонатора снимается сигнал, пропорциональный амплитуде
колебаний. При приближении зонда к поверхности образца резонансная частота
системы меняется за счет атомарного взаимодействия (поперечно-силовая
микроскопия) кончика зонда с поверхностью. Происходит резкое падение амплитуды,
изменение фазы колебаний кварцевого резонатора. Соответственно, изменяется
величина изменяемого с него сигнала. Эти изменения отслеживаются синхронным
детектором, входящим в систему обратной связи, которая управляет перемещениями
пъезотрубки сканера по оси Z. Таким образом, система обратной связи система
обратной связи поддерживает величину взаимодействия между зондом и поверхностью
образца во время сканирования. Величина взаимодействия косвенно задается
параметром Set-Point в программе управления сканированием. Управляющий сигнал,
подаваемый на Z-секцию сканера, служит источником данных для воспроизведения
рельефа поверхности образца.
Образец (обычно на
подложке) устанавливается на держатель образца. На сменное основание
устанавливается измерительная головка. После этого, с помощью моторизированной
винтовой опоры, зонд подводится к образцу на расстояние, определяемое
параметром Set-Point и, начинается сканирование в плоскости образца.
Для ввода лазерного
излучения свободный конец оптического волокна очищается от полимерного покрытия
и скалывается. Затем конец волокна закрепляется на юстировочном столике
лазерного модуля. Лазерное излучение фокусируется объективом на конце волокна.
Излучение распространяется по оптическому волокну до выходной апертуры на
заостренном конце волокна, при этом поверхность исследуемого образца ввиду
малого расстояния между зондом и поверхностью оказывается в ближнем поле
выходящего из волокна оптического излучения. Выходящее из кончика зонда
излучение рассеивается образцом, при этом часть рассеянного излучения
собирается оптической системой и направляется на детектор ФЭУ. Сигнал с ФЭУ
служит источником данных для воспроизведения оптического изображения образца.
Рассмотрим
"Shear-force" метод контроля расстояния зонд-поверхность в
ближнепольном оптическом микроскопе.
Для работы СБОМ
необходимо удерживать зонд над поверхностью на расстояниях порядка 10 нм и
менее. Существуют различные решения данной проблемы, однако наиболее широкое
распространение получили СБОМ с так называемым "shear-force" методом
контроля расстояния между зондом и образцом.
Чаще всего применяются
схемы "shear-force" контроля с использованием пъезодатчика на основе
кварцевого резонатора камертонного типа (Рис. 33).
Рис. 33. Схема
«shear-force» датчика расстояния зонд-поверхность на основе кварцевого
резонатора камертонного типа
Зонд СБОМ крепится к
кварцевому резонатору с помощью клея. Вынужденные колебания камертона на
частоте, близкой к резонансной частоте системы зонд - кварцевый резонатор,
возбуждаются с помощью дополнительного пьезовибратора. При этом зонд совершает
колебательное движение параллельно поверхности образца. Измерение силы
взаимодействия зонда с поверхностью производится посредством регистрации изменения
амплитуды и фазы изгибных колебаний кварцевого резонатора на частоте
возбуждения (по переменной составляющей напряжения на электродах резонатора
U(t)). Теория "shear-force" контроля достаточно сложна, и здесь мы
ограничимся лишь качественными соображениями. При сближении зонда и образца
наблюдаются несколько эффектов. Во-первых, появляется дополнительное
диссипативное взаимодействие зонда с поверхностью за счет сил вязкого трения (в
тонкой прослойке воздуха, прилегающего к поверхности, и в тонком слое
адсорбированных молекул на поверхности образца).
Это приводит к
уменьшению добротности системы, а, следовательно, к уменьшению амплитуды
колебаний и уширению АЧХ и ФЧХ системы зонд-резонатор на резонансной частоте.
Во-вторых, при малых расстояниях зонд-поверхность происходит изменение моды
колебаний в системе зонд-резонатор. В свободном состоянии мода колебаний
соответствует колебаниям стержня со свободным концом, а при сближении с
образцом (в пределе при касании зонда поверхности) переходит в колебания стержня
с закрепленным концом. Это приводит к увеличению резонансной частоты в системе
зонд-резонатор, т.е. сдвигу АЧХ в сторону более высоких частот.
Изменения амплитуды и
фазы изгибных колебаний в системе зонд-резонатор используются в качестве
сигналов обратной связи для контроля расстояния зонд-поверхность в
ближнепольных оптических микроскопах.
На практике используются
несколько конструктивных схем ближ-непольного оптического микроскопа. Наиболее
часто реализуется схема, в которой оптическое излучение лазера локализуется в
пространстве с помощью волоконного зонда (безапертурный). Такая схема позволяет
получить максимальную мощность излучения в области субволнового отверстия и
проводить исследование образцов как на отражение (Рис. 34 а) для непрозрачных образцов,
так и на просвет (Рис. 34 б) для прозрачных и полупрозрачных образцов.
Рис. 341. Возможные
конфигурации ближнепольного оптического микроскопа
Для увеличения
чувствительности излучение, отраженное от образца или прошедшее сквозь образец,
собирается на фотоприемнике с помощью фокусирующего зеркала или линзы. Кроме
того, данная конфигурация СБОМ широко используется в экспериментах по
ближнепольной оптической литографии.
В экспериментах, когда
требуются высокие уровни оптической накачки (как, например, при исследовании
локальных нелинейных свойств образцов), реализуется схема, в которой мощное
лазерное излучение направляется на исследуемую структуру, а прием
осуществляется с помощью ближнепольного зонда (Рис. 34 в, г).
Интересная, но менее
распространенная схема, в которой возбуждение структуры и прием ближнепольного
излучения осуществляются через зонд микроскопа, приведена на Рис. 35.
Рис. 35. Схема БОМ, в
котором засветка образца и прием излучения осуществляются с помощью одного и
того же зонда
Такое совмещение
ближнепольного источника с ближнепольным приемником является весьма
многообещающим методом, обеспечивающим очень высокое пространственное
разрешение. Однако в данной схеме излучение дважды проходит через субволновое
отверстие. Это приводит к тому, что приходящий на фотоприемник сигнал имеет
очень низкую интенсивность, и требуются высокочувствительные методы его
регистрации. Сопряжение СБОМ с оптическим монохроматором позволяет проводить
локальные спектроскопические исследования образцов. Основные области применения
ближнепольных оптических микроскопов - это исследование локальных оптических и
фотоэлектрических свойств полупроводниковых фоточувствительных структур, исследование
биологических объектов, нанотехнология.
2. Исследования
поверхности кремния с использованием сканирующего зондового микроскопа
NanoEducator.
.1 Конструкция и принцип
работы сканирующего зондового микроскопа NanoEducator
На Рис. 36 представлен внешний
вид измерительной головки СЗМ NanoEducator и обозначены основные элементы
прибора, используемые при работе. На Рис. 37 представлена конструкция
измерительной головки. На основании1 расположены сканер 7 с держателем образца
6 и механизм подвода 2 на основе шагового двигателя. Подвод зонда 5,
закрепленного на датчике взаимодействия 4, к образцу можно также осуществлять с
помощью винта ручного подвода 3. Предварительный выбор места исследования на
образце осуществляется с помощью винта 8.
На Рис. 38 представлена
функциональная схема прибора. NanoEducator состоит из измерительной головки,
электронного блока, соединительных кабелей и управляющего компьютера.
Видеокамера изображена как отдельное устройство, соединенное с компьютером.
Сигнал от датчика взаимодействия после преобразования в предусилителе поступает
в СЗМ контроллер. Управляющие сигналы от электронного блока поступают в
измерительную головку. Управление электронным блоком осуществляется от
компьютера через контроллер связи с PC.

Рис. 36. Внешний вид
измерительной головки СЗМ NanoEducator 1 - основание, 2 - держатель образца, 3
- Датчик взаимодействия, 4 - винт фиксации датчика, 5 - винт ручного подвода, 6
- винты перемещения сканера с образцом, 7 - защитная крышка с видеокамерой
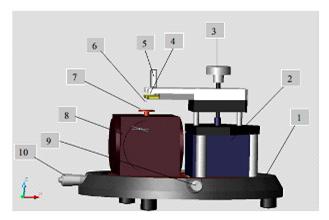
Рис. 37. Конструкция СЗМ
NanoEducator:
- основание, 2 -
механизм подвода, 3 - винт ручного подвода,4 - датчик взаимодействия, 5 - винт
фиксации датчика, 6 - зонд, 7 - держатель образца,8 - сканер, 9, 10 - винты
перемещения сканера с образцом
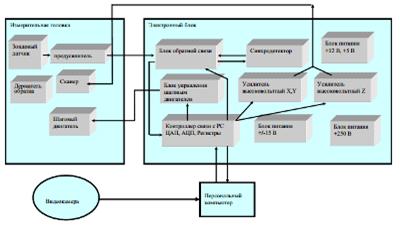
Рис. 38. Функциональная
схема прибора. NanoEducator
Универсальный датчик
туннельного тока и силового взаимодействия
В приборе NanoEducator
применяется универсальный датчик туннельного тока и модуляционного силового
взаимодействия. Датчик выполнен в виде пьезокерамической трубки длиной l=7 мм,
диаметром d=1.2 мм и толщиной стенки h=0.25 мм, жесткозакрепленной с одного
конца. На внутреннюю поверхность трубки нанесен проводящий электрод. На внешнюю
поверхность трубки нанесены два электрически изолированных полуцилиндрических
электрода. К свободному концу трубки прикреплена вольфрамовая проволока
диаметром100 мкм (Рис. 39).
Рис. 39. Конструкция
универсального датчика прибора NanoEducator
Свободный конец
проволоки, использующейся в качестве зонда, заточен электрохимически, радиус
закругления имеет величину 0.2÷0.05 мкм.
Зонд имеет электрический контакт с внутренним электродом трубки, соединенным с
заземленным корпусом прибора. При измерении туннельного тока пьезотрубка играет
роль жесткой пассивной консоли. Электрическое смещение прикладывается к образцу
относительно заземленного зонда (Рис. 40). Преобразователь, изображенный на
рисунке, вырабатывает электрическое напряжение Uт, обуславливающее протекание
туннельного тока I и выдает напряжение U пропорциональное этому току в
электронный блок.
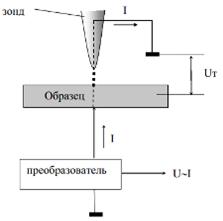
Рис. 40. Принцип
регистрации туннельного тока
В качестве датчика силового
взаимодействия одна часть пьезоэлектрической трубки используется как
пьезовибратор, а другая - как датчик механических колебаний (Рис. 41). К
пьезовибратору подводится переменное электрическое напряжение с частотой,
равной резонансной частоте силового датчика. Амплитуда колебаний при большом
расстоянии зонд-образец максимальна. Как видно из Рис. 42, в процессе колебаний
зонд отклоняется от равновесного положения на величину А0, равную амплитуде его
вынужденных механических колебаний (она составляет доли микрона), при этом на
второй части пьезоэлемента (датчике колебаний) возникает переменное
электрическое напряжение, пропорциональное смещению зонда, которое и измеряется
прибором.
При приближении зонда к
поверхности образца зонд начинает касаться образца в процессе колебаний. Это
приводит к смещению амплитудно-частотной характеристики (АЧХ) колебаний датчика
влево по сравнению с АЧХ, измеренной вдали от поверхности (Рис. 42). Так как
частота вынуждающих колебаний пьезотрубки поддерживается постоянной и равной ω0
в свободном состоянии, то при приближении зонда к поверхности
амплитуда его колебаний уменьшается и становится равной A. Эта амплитуда
колебаний регистрируется со второй половины пьезотрубки.
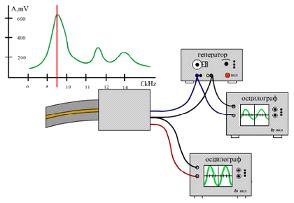
Рис. 41. Принцип работы
пьезоэлектрической трубки в качестве датчика силового взаимодействия
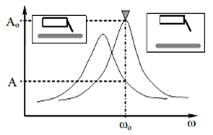
Рис. 42. Изменение
частоты колебаний силового датчика при приближении к поверхности образца
Сканер
Способ организации
микроперемещений, использующийся в приборе NanoEducator, основан на
использовании зажатой по периметру металлической мембраны, к поверхности
которой приклеена пьезопластинка (Рис. 43 а). Изменение размеров пьезопластинки
под действием управляющего напряжения будет приводить к изгибу мембраны.
Расположив такие мембраны по трем перпендикулярным сторонам куба и соединив их
центры металлическими направляющими, можно получить трех координатный сканер
(Рис. 43 б).
Каждый пьезоэлемент 1,
закрепленный на гранях куба 2, может передвигать прикрепленный к нему толкатель
3 в одном из трех взаимно перпендикулярных направлений - X, Y или Z при
приложении к нему электрического напряжения. Как видно из рисунка, все три
толкателя соединены в одной точке 4. С некоторым приближением можно считать,
что эта точка перемещается по трем координатам X, Y, Z. К этой же точке
прикрепляется стойка 5 с держателем образца 6. Таким образом, образец
перемещается по трем координатам под действием трех независимых источников
напряжения. В приборах NanoEducator максимальное перемещение образца составляет
около 50-70 мкм, что и определяет максимальную площадь сканирования.
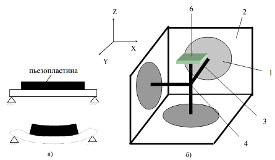
Рис. 43. Принцип
действия(а) и конструкция(б) сканера прибора NanoEducator
Механизм
автоматизированного подвода зонда к образцу (захват обратной связи)
Диапазон перемещений
сканера по оси Z составляет около10 мкм, поэтому перед началом сканирования
необходимо приблизить зонд к образцу на это расстояние. Для этого предназначен
механизм подвода, схема которого приведена на Рис. 44. Шаговый двигатель 1 при
подаче на него электрических импульсов вращает винт подачи 2 и перемещает
планку 3 с зондом 4, приближая или отдаляя его от образца 5, установленного на
сканере 6. Величина одного шага составляет около 2 мкм.
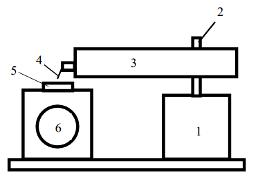
Рис. 44. Схема механизма
подвода зонда к поверхности образца
Так как шаг механизма
подвода значительно превосходит величину требуемого расстояния зонд-образец в
процессе сканирования, то во избежание деформации зонда его подвод
осуществляется при одновременной работе шагового двигателя и перемещениям
сканера по оси Z по следующему алгоритму:
Система обратной связи
отключается и сканер “втягивается”, т.е. опускает образец в нижнее крайнее
положение:
. Механизм подвода зонда
производит один шаг и останавливается.
. Система обратной связи
включается, и сканер плавно поднимает образец, одновременно производится анализ
наличия взаимодействия зонд-образец.
. Если взаимодействие
отсутствует, процесс повторяется с пункта 1.
Если во время
вытягивания сканера вверх появится ненулевой сигнал, система обратной связи
остановит движение сканера вверх и зафиксирует величину взаимодействия на
заданном уровне. Величина силового взаимодействия, при котором произойдет
остановка подвода зонда, и будет происходить процесс сканирования, в приборе
NanoEducator характеризуется параметром AmplitudeSuppression (подавление
амплитуды):
=A0(1- Amplitude
Suppression)
.2 Проведение СЗМ
эксперимента
После вызова программы
NanoEducator на экране компьютера появляется главное окно (Рис. 45). Работу
начинаю с пункта меню File и в нем выбраю Open или New либо соответствующие им
кнопки на панели инструментов. Выбор команды File⇒New
означает переход к проведению СЗМ измерений, а выбор команды File⇒Open
означает переход к просмотру и обработке ранее полученных данных. Программа
позволяет осуществлять просмотр и обработку данных параллельно с измерениями.
Рис. 45. Главное окно
программыNanoEducator
После выполнения команды
File⇒New на экране появляется окно диалога, которое позволяет выбрать
или создать рабочий каталог, в который по умолчанию будут записываться
результаты текущего измерения. В процессе проведения измерений все полученные
данные последовательно записываются в файлы с именами ScanData+i.spm, где
индекс i обнуляется при запуске программы и наращивается при каждом новом
измерении. Файлы ScanData+i.spm помещаются в рабочий каталог, который
устанавливается перед началом измерений. Существует возможность выбора другого
рабочего каталога во время проведения измерений. Для этого необходимо нажать
кнопку ,
расположенную на панели инструментов главного окна программы.
,
расположенную на панели инструментов главного окна программы.
Для сохранения
результатов текущего измерения нажимаю кнопку SaveExperiment в окне
сканирования. В появившемся окне диалога выбираю каталог и указываю имя файла,
при этом файл ScanData+i.spm, который служит временным файлом сохранения данных
в процессе проведения измерений, будет переименован в заданное мной имя файла.
Если не выполнить операцию сохранения результатов измерений, то при следующем
запуске программы результаты, записанные во временных файлах ScanData+i.spm,
будут последовательно перезаписываться (если не изменен рабочий каталог). О
наличии временных файлов результатов измерений в рабочем каталоге выдается
предупреждение перед закрытием и после запуска программы. Стандартное имя
ScanData можно изменить, задав его в окне выбора рабочего каталога. Вызов окна
выбора рабочего каталога происходит при нажатии кнопки ,
расположенной на панели инструментов главного окна программы. Сохранить
результаты измерений можно также в окне SPM FileExplorer, поочередно выделяя
необходимые файлы и сохраняя их в выбранном каталоге.
Существует возможность
экспорта результатов, полученных при помощи прибора NanoEducator в ASCII
формат, который может быть импортирован программой НТ МДТ Nova и другими
программами. ВASCII формат экспортируются изображения сканов, а также данные их
сечений. Для экспорта данных необходимо нажать кнопку  Export,
расположенную в инструментальной панели главного окна программы, либо выбрать
Export→ASCII в пункте меню File этого окна.
Export,
расположенную в инструментальной панели главного окна программы, либо выбрать
Export→ASCII в пункте меню File этого окна.
После закрытия окна
диалога на экран выводится панель управления прибором (Рис. 46). В левой части
панели управления прибором расположены кнопки выбора конфигурации СЗМ:
сканирующий силовой микроскоп (ССМ) сканирующий туннельный микроскоп (СТМ).

Рис. 46. Панель управления
прибором
Для подготовки к ССМ
измерениям были выполнены следующие операции.
Установка образца.
Перед установкой образца
снимаю датчик с зондом, чтобы не повредить зонд.
Устанавливаю образец на
магнитном столике (образец прикреплен к металлическому держателю).
Установка зондового
датчика
Эту операцию выполняю
при верхнем положении держателя датчика. Датчик перевожу в верхнее положение
поворотом винта ручного подвода 1 по часовой стрелке (Рис. 47).
Зондовый датчик
удерживаю за металлические кромки основания) (см. Рис. 47), ослабляю винт
фиксации зондового датчика 2 на крышке измерительной головки. Вставляю датчик в
гнездо держателя до упора, завинчиваю винт фиксации по часовой стрелке до
легкого упора.
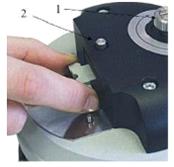
Рис. 47. Установка
зондового датчика
Выбор места сканирования
Для выбора участка для
исследования на образце использую винты перемещения двух координатного столика,
расположенного в нижней части прибора.
Предварительный подвод
зонда к образцу
Операция
предварительного подвода не является обязательной для каждого измерения,
необходимость ее выполнения зависит от величины расстояния между образцом и
острием зонда. Операцию предварительного сближения желательно производить, если
расстояние между кончиком зонда и поверхностью образца превышает 0.5÷1
мм. При использовании автоматизированного подвода зонда к образцу
с большого расстояния между ними процесс подвода займет очень много времени.
Построение резонансной
кривой и установка рабочей частоты
Эта операция обязательно
выполняется в начале каждого эксперимента и, пока она не произведена, переход к
дальнейшим этапам измерений заблокирован. Кроме того, в процессе измерений
иногда возникают ситуации, требующие повторного выполнения этой операции
(например, при потере контакта).
Окно поиска резонанса
вызываю нажатием кнопки  .
Выполнение этой операции предусматривает измерение амплитуды колебаний зонда
при изменении частоты вынужденных колебаний, задаваемых генератором. Для этого
нажимаю кнопку RUN (48).
.
Выполнение этой операции предусматривает измерение амплитуды колебаний зонда
при изменении частоты вынужденных колебаний, задаваемых генератором. Для этого
нажимаю кнопку RUN (48).
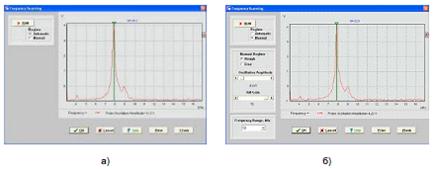
Рис. 48. Окно режима
поиска резонанса и установки рабочей частоты: а) - автоматический режим, б) -
ручной режим
В режиме Automatic
автоматически устанавливается частота генератора, равная частоте, при которой
наблюдалась максимальная амплитуда колебаний зонда. График, демонстрирующий
изменение амплитуды колебаний зонда в заданном диапазоне частот (48 а),
позволяет наблюдать форму резонансного пика. Если резонансный пик недостаточно
ярко выражен, или амплитуда при частоте резонанса мала (менее 1V), то
необходимо изменить параметры проведения измерений и повторно провести определение
резонансной частоты.
Для этого предназначен
режим Manual. При выборе этого режима в окне Frequency Scanning появляется
дополнительная панель (Рис. 48 б), позволяющая корректировать следующие
параметры:
Амплитуда колебаний,
задаваемых генератором (Oscillation Amplitude). Рекомендуется устанавливать эту
величину минимальной (вплоть до нуля) и не более 50 мV.
Коэффициент усиления
амплитуды (AM Gain). При недостаточной величине амплитуды колебаний зонда
(<1 V) рекомендуется увеличить коэффициент AM Gain.
Для начала операции
поиска резонанса необходимо нажать кнопку RUN.
Режим Manual позволяет
вручную менять выбранную частоту, передвигая зеленый курсор на графике с
помощью мыши, а также уточнить характер изменения амплитуды колебаний в узком
диапазоне значений вокруг выбранной частоты (для этого необходимо установить
переключатель Manual Regime в положение Fine и нажать кнопку RUN).
Захват взаимодействия
Для захвата
взаимодействия выполняю процедура контролируемого сближения зонда и образца с
помощью механизма автоматизированного подвода. Окно управления этой процедурой
вызывается нажатием кнопки  панели управления
прибором и выбором
панели управления
прибором и выбором  в
появившемся выпадающем меню. При работе с ССМ эта кнопка становится доступной
после выполнения операции поиска и установки резонансной частоты. Окно Scanning
Force Microscopy, Landing (Рис. 49) содержит элементы управления подводом
зонда, а также индикации параметров, которые позволяют анализировать ход
выполнения процедуры.
в
появившемся выпадающем меню. При работе с ССМ эта кнопка становится доступной
после выполнения операции поиска и установки резонансной частоты. Окно Scanning
Force Microscopy, Landing (Рис. 49) содержит элементы управления подводом
зонда, а также индикации параметров, которые позволяют анализировать ход
выполнения процедуры.
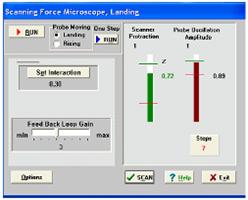
Рис. 49. Окно режима
захвата взаимодействия
В окне LANDING имеем
возможность наблюдать за следующими величинами:
вытянутость сканера
(Scanner Protraction) по оси Z относительно максимально возможной, принятой за
единицу. Величина относительного удлинения сканера характеризуется уровнем
заполнения левого индикатора цветом, соответствующим зоне, в которой находится
сканер в текущий момент: зеленый цвет - рабочая зона, синий - вне рабочей зоны,
красный - сканер подошел слишком близко к поверхности образца, что может
повлечь деформацию зонда. В последнем случае программа выдает звуковое
предупреждение;
амплитуда колебаний
зонда (Probe Oscillation Amplitude) относительно амплитуды его колебаний в отсутствии
силового взаимодействия, принятой заединицу. Величина относительной амплитуды
колебаний зонда показана на правом индикаторе уровнем его заполнения бордовым
цветом. Горизонтальная метка на индикаторе Probe Oscillation Amplitude
указывает на уровень при переходе через который производится анализ состояния
сканера и его автоматический вывод в рабочее положение;
количество шагов
(Steps), пройденных в заданном направлении (ProbeMoving): Landing- сближение,
Rising- удаление.
До начала процесса
опускания зонда:
. Убедился, что в
элементе Probe Moving выбран пункт Landing (сближение)
. Проверил правильность
установок параметров сближения:
коэффициент усиления в
цепи обратной связи Feed Back Loop Gain установлен на значении 3,
Нажал кнопку Set
Interaction и убедился, что параметр Amplitude Suppression в окне Set
Interaction (Рис. 50) имеет величину около 0.3.
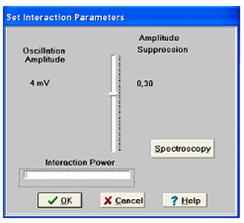
Рис. 50. Окно установки
величины взаимодействия зонда и образца
. Нажал на кнопку RUN.
Индикатор Steps начинает
отсчитывать пройденные шаги. После захвата взаимодействия появляется сообщение
Landingdone.
Для вывода зонда из
обратной связи и увеличения расстояния между зондом и образцом используется
режим отвода зонда (Probe Moving: Rising). Для выполнения операции отвода
выбрал направление движения Probe Moving: Rising и нажал кнопку RUN.
Сканирование
После выполнения
процедуры подвода (Landing) и захвата взаимодействия становится доступным
сканирование (кнопка  в
окне панели управления прибором).
в
окне панели управления прибором).
Нажав эту кнопку (вид
окна сканирования представлен на Рис. 51), приступил непосредственно к
проведению измерений и получению результатов измерений.
В режиме сканирования
установил параметры сканирования. Эти параметры сгруппированы в правой части
верхней панели окна Scanning.
В первый раз после
запуска программы они устанавливаются по умолчанию:
Площадь сканирования Scan
Area (Xnm*Ynm): 5000*5000 нм;
Количество точек
измерений по осям X,
Y: NX=100, NY=100;
Скорость сканирования Velocity=
1000 nm/s;
Путь сканирования Path
определяет направление сканирования. Программа позволяет выбирать направление
оси быстрогос канирования(Х или Y). При запуске программы устанавливается
Path=X+.
После задания параметров
сканирования нажал кнопку Apply для подтверждения ввода параметров и кнопку RUN
для начала сканирования.
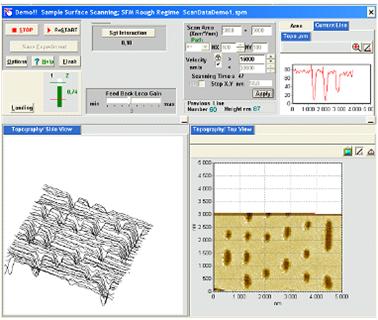
Рис. 51. Окно управления
процессом и отображения результатов сканирования ССМ
Для сохранения
результатов измерения нажал кнопку Save Experiment в окне сканирования и в
появившемся окне диалога выбрал каталог и указал имя файла.
Список используемых
источников
1. Булыгина Е.В, Макарчук В.В, Панфилов Ю.В., Оя Д.Р., Шахнов
В.А. «Нанорзмерные структуры: классификация, формирование и исследование»:
Учебное пособие для Вузов. М.: 2006 г
. В.Л. Миронов. Основы сканирующей зондовой микроскопии.
Учебное пособие для студентов старших курсов высших учебных заведений. ИФМ РАН-
г. Н. Новгород, 2004 г.
. Дедков Е.Г., Чуприк А.А., Бобринецкий И.И., Неволин В.К.,
«Приборы и методы зондовой микроскопии» МФТИ Учебное пособие М., 2011 г.
. Тихомиров А.А. Основы сканирующей зондовой микроскопии и
методы ее применения в современных научных исследованиях». Приложение к журналу
«Вестник РГТУ» №4 Рязань 2009 г.
. Сусло А.А., Чижик С.А., «Методы испытаний и
оборудование». Журнал материал, технологии, инструмент №3 1997 г.
. Дубровин Е.В., Мешков Г.Б, Яминский И.В. « Сканирующая
зондовая микроскопия: получение трехмерных изображений». Лабораторная работа
. Руководство пользователя прибора NanoEducator модель
СЗМУ-Л5