Проектирование самолетного ответчика система воздушной радиолокации
Содержание
самолетный
ответчик радиолокация воздушный
Задание на
курсовой проект
Введение
. Система ВРЛ аппаратуры УВД
. Обобщенная структурная схема системы вторичной радиолокации
. Общие сведения о самолетном ответчике
. Расчет технических параметров
. Принцип работы самолетного ответчика
. Принцип действия СО по структурной схеме
. Принцип работы СО по функциональной схеме
. Разработка функциональной схемы передатчика
Заключение
Список литературы
Задание на курсовой проект
Спроектировать самолетный ответчик системы ВРЛ. Разработать
функциональную схему передающего устройства, произвести расчет СВЧ генератора.
Введение
В соответствии с принципами обеспечения безопасности полетов воздушные
суда (ВС) должны находиться под непрерывном контролем диспетчеров на всех
этапах выполняемых полетов. Это значит, что должно быть обеспечено наблюдение
за каждым ВС, измерение его координат и установлена двухсторонняя связь между
экипажем и диспетчерами. Кроме того, диспетчер должен располагать информацией
об опасных метеообразованиях и ограничениях пространства для выполнения
полетов. Совокупность распределенных в пространстве ВС, метеообразований, зон,
разрешенных или запрещенных для полетов, называется воздушной обстановкой.
Основными источниками информации о воздушной обстановке в системах
управления воздушным движением (УВД) являются радиолокаторы: обзорные (ОРЛ),
диспетчерские (ДРЛ), посадочные (ПРЛ), обзора летного поля (РЛС ОЛП) и
метеорологические (МРЛС).
Особое место среди радиолокаторов и других технических средств УВД
занимают системы вторичной радиолокации (радиолокационные системы с активным
ответом), которые состоят из наземных запросчиков и самолетных (бортовых)
ответчиков. Наземный запросчик излучает запросный сигнал, который принимается и
обрабатывается самолетным ответчиком. Ответный сигнал излучается ответчиком на
другой несущей частоте и принимается приемником запросчика.
Отметим основные преимущества системы вторичной радиолокации (СВРЛ) перед
первичными радиолокаторами:
· Большая дальность действия при небольшом энергетическом потенциале
ответчика и ее независимость от эффективной отражающей площади.
· СВРЛ работают, как правило, дециметровом диапазоне волн.
Затухание в атмосфере радиоволн этого диапазона мало, поэтому дальность
действия системы от состояния атмосферы зависит незначительно.
· Несущие частоты (длины волн) по каналам запроса и ответа
выбираются различными, поэтому приемник запросчика не принимает маскирующие
помеховые сигналы, отраженные от местных предметов и гидрометеообразований. При
этом отпадает необходимость применения устройств селекции движущихся целей
(СДЦ). В отличии от РЛС с СДЦ при активном ответе сохраняется возможность
слежения за целями, у которых доплеровский сдвиг частоты равен нулю (полет по
кругу).
· По каналу ответа с борта ВС в зондированном виде может быть
передана в принципе любая дополнительная информация, необходимая для УВД,
например: индивидуальный (бортовой или условный) номер самолета, высота полета,
измеряемая бортовым барометрическим высотомером более точно, чем наземным
радиолокатором, путевая скорость самолета, запас топлива в баках и т.п. в
зависимости от режимов работы и кодов запросных сигналов.
Очевидным недостатком СВРЛ является необходимость установки на борту
ответчика, параметры которого должны быть жестко согласованны с параметрами
наземного запросчика.
Предусматривает два способа стандарта работы СВРЛ: стандарт действующий
на территории России (стандарт СЭВ или УВД); стандарт соответствующий нормам
международной организации гражданской авиации (стандарт ICAO). Отличаются эти стандарты
длительностями запросных и ответных импульсов, кодовыми интервалами запросных
импульсов, структурой ответных кодов, характером информации, передоваемой
ответчиком по каналу ответа, а также возможно отличие в несущих частотах
запроса и ответа. По нормам ICAO в
зависимости от кода запроса ответчик передает либо условный
двоично-восьмеричный номер, набираемый экипажем на пульте управления по
программе полета, либо абсолютную высоту - циклическим кодом Гиллхема. По
стандарту УВД в зависимости от кода запроса ответчик передает либо бортовой
номер самолета двоично-десятичным кодом, либо так называемую текущую
информацию, которая состоит из информации о высоте полета - двоично-десятичным
кодом и информация о запасе топлива в баках двоичным кодом, либо вектор путевой
скорости - двоично-десятичным кодом, либо только информационный код.
В соответствии с требованиями указанных стандартов СВРЛ предназначены для
получения информации о воздушных судах, находящихся в воздушном пространстве,
контролируемом службой УВД и должны обеспечивать:
· Определение координат ВС, оборудованные ответчиками;
· Определения местоположения ВС относительно посадочного
радиолокатора при наличии в нем вторичного радиолокатора;
· Получение информации о высоте полета, бортовом номере, запасе
топлива, об аварийной ситуации, выпуске шасси и о векторе путевой скорости;
· Сопряжение с аппаратурой потребителей информации;
· Выполнения своих функций без нарушения работы другого
оборудования.
1. Система
ВРЛ аппаратуры УВД
СВРЛ аппаратуры УВД предназначены для повышения эффективности
регулирования воздушного движения на трассах и в районах расположения
аэродромов.
Они решают следующие задачи:
привод самолетов в район аэродрома посадки;
управление движением самолетов в районе аэродрома;
заход на посадку;
обеспечение самой посадки.
СВРЛ аппаратуры УВД включают самолетные ответчики (СО), расположенные на
борту ЛА, и наземные вторичные радиолокаторы (ВРЛ) в комплексе с аппаратурой
отображения информации (см. рис.1.1).
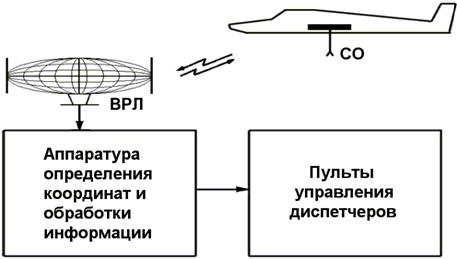
Рис. 1.1 Состав СВРЛ аппаратуры УВД
ВРЛ осуществляет кодированный запрос ответчиков самолетов, находящихся в
зоне его действия. СО излучают ответные сигналы, так называемые “кодовые
посылки”, которые принимаются ВРЛ и транслируются на командный диспетчерский
пункт (КДП). Аппаратура КДП обеспечивает возможность определения координат
самолетов (дальность, азимут), а также получения и отображения дополнительной
информации (бортовой номер, высота, остаток топлива и др.) непосредственно на
рабочих пультах диспетчеров УВД.
В зависимости от режима работы, выбранного на пульте управления СО, он
может взаимодействовать со следующими типами наземных ВРЛ:
обзорными радиолокаторами (ОРЛ) (в режиме П-35);
диспетчерскими радиолокаторами (ДРЛ) (в режимах «РСП» и «УВД»);
посадочными радиолокаторами (ПРЛ) (в режимах «РСП» и «УВД»).
ОРЛ решает задачу дальнего обнаружения самолетов и привода их в зону
действия ДРЛ. Дальность действия ОРЛ не менее 300 км (пример ОРЛ: изделие
П-35).
ДРЛ предназначены для контроля за положением самолетов на расстоянии до
150 км от аэродрома, их опознавания и вывода самолетов в зону действия ПРЛ.
Оператор ДРЛ (диспетчер) определяет очередность посадки, передает на борт
самолета информацию, необходимую для вывода самолета в плоскость посадочного
курса (пример ДРЛ: изделия “Корень ”).
Оператор ПРЛ, наблюдая за отметкой самолета на индикаторе, определяет его
отклонение от линии планирования в плоскостях курса и глиссады, а также
расстояние до точки оптимального приземления и по каналу радиосвязи передает на
борт команды для исправления траектории снижения самолета (пример ПРЛ: изделия
РСП-6).
Диаграмма направленности (ДН) остронаправленных антенн ВРЛ в
горизонтальной плоскости имеет боковые лепестки. Причем мощность их излучения
достаточна для запроса ответчиков, находящихся на значительных расстояниях от
ВРЛ. Поэтому наличие боковых лепестков у ДН антенн может привести к появлению
на экранах индикаторов ВРЛ добавочных отметок под ложными азимутами, а также
паразитной загрузке бортовых ответчиков. Для того чтобы избежать этого в СО
осуществляется подавление запросов от боковых лепестков ДН антенн ДРЛ и ПРЛ.
Подавление запроса от боковых лепестков ДН антенн ДРЛ осуществляется
путем использования, так называемой, “трехимпульсной системы”, суть которой
заключается в следующем (см. рис.1.2). К двум импульсам запросного кода Р1 и Р3
(см. рис.1.2.а), излучаемым направленной антенной ДРЛ, добавляется третий
импульс Р2 (импульс подавления), излучаемый отдельной ненаправленной антенной
(ДН направленной и ненаправленной антенн приведены на рис.1.2.б). Импульс
подавления Р2 во времени отстает на 2 мкс от импульса Р1 запроса.
Энергетический уровень излучения антенны подавления подбирается таким
образом, чтобы в местах приема амплитуда импульса подавления была заведомо
больше амплитуды импульсов, излучаемых боковыми лепестками ДН и меньше
амплитуды импульсов, излучаемых главным лепестком.
В СО после детектирования происходит сравнение амплитуд импульсов кода
запроса (Р1, Р3) и импульса подавления (Р2). Ответ производится только тогда,
когда амплитуда импульсов Р1, Р3 больше амплитуды импульса Р2 на 9 и более
децибел.

 ) б)
) б)
Рис. 1.2 «Трехимпульсная система» подавления запроса от боковых лепестков
ДН антенн ВРЛ: а - структура запросного сигнала ДРЛ; б - ДН направленной и
ненаправленной антенн ДРЛ
Для обеспечения подавления запроса от боковых лепестков ДН антенн ДРЛ
должен иметь либо два отдельных передатчика (запроса и подавления), либо один
общий передатчик и СВЧ переключатель антенн.
Подавление запроса от боковых лепестков ДН антенн ПРЛ производится
методом плавающего порога, суть которого заключается в следующем (см. рис.1.3).
В СО с помощью инерционной следящей системы в виде напряжения запоминается
амплитуда сигналов, принятых от основного лепестка ДН. Часть этого напряжения,
соответствующая заданному уровню, превышающему амплитуду сигналов боковых
лепестков (см. рис.1.3.а), устанавливается в качестве порога. В следующее
облучение ответ производится только при превышении этого порога запросными
сигналами (см. рис.1.3.б). Порог корректируется в последующие облучения.
Однако, энергетические уровни запросных сигналов курса и глиссады ПРЛ
различны, т.к. курс и глиссада задаются разными антеннами. В связи с этим в ПРЛ
для режима работы СО «УВД» введено раздельное кодирование
запросов по курсу и глиссаде, а СО имеет соответственно 2 канала подавления
запроса боковых лепестков ДН антенн ПРЛ. При этом запрос по курсу (код запроса
двухимпульсный, а интервал между импульсами 3,0 мкс) обрабатывается одним
приемным каналом СО, а запрос по глиссаде (интервал между импульсами 5,4 мкс) -
другим.
Рис. 1.3 Принцип подавление запроса от боковых лепестков ДН антенн ПРЛ
пороговым методом: а - временная эпюра запросного сигнала; б - временная эпюра
ответного сигнала
Для обеспечения нормальной работы ответчика при наличии на аэродроме двух
ПРЛ с пересекающимися ДН (такая ситуация имеет место на аэродромах, оснащенных
несколькими взлетно-посадочными полосами (ВПП)) ПРЛ имеют возможность
кодирования запросов по курсу и глиссаде одинаковым кодом для режима
работы СО «РСП». При этом один ПРЛ работает в режиме РСП-1
(интервал между импульсами 3,0 мкс), второй - в режиме РСП-2 (интервал между
импульсами 5,4 мкс), а запросы первого и второго ПРЛ обрабатываются разными
приемными каналами СО.
2. Обобщенная структурная схема системы вторичной радиолокации
Рис. 2.1 Обобщенная структурная схема ВРЛ
На рис.2.1 приведена структурная схема системы вторичной радиолокации,
совмещенная с первичным радиолокатором. Первичный радиолокатор представлен
основными устройствами. В него входят синхронизатор, передающее устройство
(ПРД), антенный переключатель (АП), приемо-передающая антенна (АУ1), приемник
(ПРМ), схема развертки и индикатор.
Функцию наземного запросчика системы выполняет вторичный радиолокатор
(ВРЛ), который состоит из шифратора, передающего устройства (ПРД), антенного
переключателя (АП), антенного устройства (АУ), приемника ответных сигналов
(ПРМ), дешифратора и устройства отображения информации.
Работа
СВРЛ заключается в следующем. Шифратор вторичного радиолокатора под действием
импульсов синхронизации от первичного радиолокатора формирует два импульса с
заданным кодовым интервалом  между
передними фронтами. Кодовый интервал определяет содержание запрашиваемой
информации. Передающее устройство преобразует эти видеоимпульсы в радиоимпульсы
с несущей частотой запроса
между
передними фронтами. Кодовый интервал определяет содержание запрашиваемой
информации. Передающее устройство преобразует эти видеоимпульсы в радиоимпульсы
с несущей частотой запроса  1030 или
837,5 МГц, которые через антенный переключатель поступают в антенну и
излучаются в пространство. Диаграмма направленности ВРЛ узкая в горизонтальной
плоскости (не более
1030 или
837,5 МГц, которые через антенный переключатель поступают в антенну и
излучаются в пространство. Диаграмма направленности ВРЛ узкая в горизонтальной
плоскости (не более  ) и широкая в вертикальной плоскости. Она вращается по
азимуту на
) и широкая в вертикальной плоскости. Она вращается по
азимуту на  с периодом обзора 4-12 с.
с периодом обзора 4-12 с.
Самолетный
ответчик (СО) состоит из антенно-фидерного устройства (АФУ), распределительного
фильтра (РФ), приемника дешифратора запросных сигналов, шифратора ответных
сигналов и передатчика.
При
облучении летательного аппарата лучом антенны запросчика запросные импульсы с
антенны ответчика через разделительный фильтр поступают в приемник, где
преобразуются, усиливаются по промежуточной частоте и детектируются. Таким
образом, на выходе приемника ответчика образуется пачка парных запросных
импульсов (рис.2.2). Временные кодовые интервалы  ,
, между парными импульсами запроса определяют
содержание информации, которую должен передать ответчик.
между парными импульсами запроса определяют
содержание информации, которую должен передать ответчик.
Рис. 2.2 Сигналы запроса на выходе приемника СО
Запросные сигналы поступают на вход дешифратора, в котором производится
распознавание содержания запрашиваемой информации. В простейшем случае
дешифратор представляет собой совокупность линий задержки с отводами через
установленные стандартом временные интервалы запросных кодов и логических схем
«И». в результате совпадения двух запросных импульсов в дешифраторе образуется
управляющий импульс, который является командой шифратору для формирования
импульсов координатного и соответствующего информационного кода, например,
бортового номера или высоты и т.п. на информационные входы шифратора поступает
закодированная информация от соответствующих датчиков(бортовой или условный номер
N, высота H, запас топлива Q и т.п.) шифратор формирует пачку ответных видеоимпульсов, в которой
закодирована запрашиваемая информация, снятая с соответствующего датчика. Эти
импульсы поступают на вход передающего устройства, состоящего из подмодулятора,
модулятора и генератора СВЧ.
Пачка
видеоимпульсов преобразуется передающим устройством в пачку радиоимпульсов,
которые через развязывающий фильтр поступают в антенну и излучаются в
пространство. Несущая частота ответных сигналов  = 740 или
1090 МГц и отличается от несущей частоты запросных сигналов. Развязывающий
фильтр, включенный между антенной приемником и передатчиком, выполняет функции
антенного переключателя. Благодаря частотно избирательным свойствам фильтра
происходит разделение сигналов с частотами запроса и ответа. Фильтр обычно
выполняется на полосковых линиях.
= 740 или
1090 МГц и отличается от несущей частоты запросных сигналов. Развязывающий
фильтр, включенный между антенной приемником и передатчиком, выполняет функции
антенного переключателя. Благодаря частотно избирательным свойствам фильтра
происходит разделение сигналов с частотами запроса и ответа. Фильтр обычно
выполняется на полосковых линиях.
Ответные
сигналы с несущими частотами равными
740 или 1090 МГц принимаются антенной и приемником ВРЛ и декодируется его
дешифратором. В ответном сигнале имеется два так называемых координатных или
опорных импульсов. По времени запаздывания этих импульсов относительно
запросных, с учетом времени задержки в аппаратуре на время декодирования и
кодирования, определяется дальность до ответчика. Координатные (опорные)
импульсы подаются в устройство отображения информации, а также могут быть
поданы на индикатор первичного радиолокатора для формирования на нем отметки
цели по активному каналу. Угловая координата ответчика (азимут) определяется
методом пеленгации по максиму, т.е. путем измерения угла между направлением на
север и направлением луча антенны запросчика, при котором принимается ответные
сигналы.
Дешифратор
ВРЛ выделяет дополнительную информацию, переданную ответчиком (например,
бортовой или условный номер, высоту и т.п.), которая отображается в устройстве
отображения.
Кодовые
интервалы между запросными импульсами, как правило, изменяются по программе,
например, через период повторения  , как это
показано на рис.2. В соответствии с кодами запроса =9,4 мкс =14 мкс
информационный ответный код будет содержать в одном периоде повторения бортовой
номер N, а в другом = высоту H с запасом
топлива Q соответственно. В устройстве отображения эта
информация запоминается и отображается непрерывно в течение всего периода
обзора.
, как это
показано на рис.2. В соответствии с кодами запроса =9,4 мкс =14 мкс
информационный ответный код будет содержать в одном периоде повторения бортовой
номер N, а в другом = высоту H с запасом
топлива Q соответственно. В устройстве отображения эта
информация запоминается и отображается непрерывно в течение всего периода
обзора.
3. Назначение СО и выбор тактических характеристик
СО предназначен для ответа на запросы ВРЛ и автоматической передачи
информации о номере самолета, высоте полета, остатке топлива и других
сообщений.
СО обеспечивает решение следующих задач:
-
увеличение дальности обнаружения самолета наземными ВРЛ за счет активного
ответа;
-
исключение помех от метеофакторов и местных предметов на экранах ВРЛ за счет
кодирования ответного сигнала;
-
автоматическое индивидуальное опознавание самолета (передача информации о
бортовом номере самолета);
-
возможность непрерывного контроля высоты полета ЛА;
-
автоматическую передачу с борта самолета информации об остатке топлива и др.
сообщений.
Параметры и характеристики приемного тракта СО зависят от типа ВРЛ, с
которым в данный момент ведется взаимодействие. Это связано с тем, что при
работе с ДРЛ функции приемника у СО выполняет блок приемника-передатчика, а при
взаимодействии с ПРЛ и ОРЛ - блок посадочных сигналов (БПС).
Параметры и характеристики передающего тракта СО не зависят от типа ВРЛ,
с которым в данный момент ведется взаимодействие.
Частота ответного сигнала СО зависит от положения переключателя «Волны»
на пульте управления и может принимать одно из четырех значений: 730, 740, 750
и 1090 МГц. Причем первые три значения частоты соответствуют параметрам систем
посадки, соответствующих отечественному стандарту, а значение 1090 МГц -
стандарту международной организации ICAO.
Мощность передатчика - не менее 250 Вт.
Приемное устройство ответчика должно обладать большим динамическим
диапазоном. Минимальная дальность действия ВРЛ должна быть не более 2 км, а
максимальная для вторичного канала трассового радиолокатора - 400 км.
При
изменение дальности от максимального до минимального мощность запросных
сигналов на входе ответчика изменяется в  раз или
на 46 дБ.
раз или
на 46 дБ.
Из
условия подавления боковых лепестков отношение амплитуд запросных импульсов на
входе приемника ответчика должно быть  дБ (7,94
по мощности или 2,82 по напряжению).сравнение амплитуд импульсов
дБ (7,94
по мощности или 2,82 по напряжению).сравнение амплитуд импульсов  и
и  происходит
на выходе приемника ответчика. При больших уровнях запросных сигналов (на малых
дальностях
происходит
на выходе приемника ответчика. При больших уровнях запросных сигналов (на малых
дальностях  и устройство ПБЛ выдает команду «не отвечать», хотя
запрос идет по основному лепестку и условие дБ на
входе приемника выполняется.
и устройство ПБЛ выдает команду «не отвечать», хотя
запрос идет по основному лепестку и условие дБ на
входе приемника выполняется.
Из
изложенного следует, что приемное устройство ответчика не должно переходить в
ограничение запросных сигналов ,и  в
динамическом диапазоне не менее 46 дБ.
в
динамическом диапазоне не менее 46 дБ.
В
соответствии с требованиями стандарта УВД динамический диапазон приемника
должен быть 50 дБ.
Надежное
функционирование ВРЛ возможно только при полном соответствии параметров запросчиков
и ответчиков, в частности, каналов связи: несущие частоты запроса, ответа и
поляризации волн.
Максимальная
дальность действия ВРЛ, регламентированная стандартом УВД, зависит от типа
наземного радиолокатора. Для аэродромного локатора - 120 км, для аэроузлового -
200км и для трассового - 400 км.
Несущая
частота запроса должна быть 1030 0,2МГц
или 8373 МГц. Это следует понимать так, что запросные сигналы
могут поступать на частоте 1030МГц или 837,5 МГц, а приемник ответчика в ряде
режимов работы должен принимать сигналы с любыми указанными частотами. Такая
возможность реализуется в супергетеродинном приемнике соответствующим выбором
частоты гетеродина, стабилизированной кварцем, и промежуточной частоты.
0,2МГц
или 8373 МГц. Это следует понимать так, что запросные сигналы
могут поступать на частоте 1030МГц или 837,5 МГц, а приемник ответчика в ряде
режимов работы должен принимать сигналы с любыми указанными частотами. Такая
возможность реализуется в супергетеродинном приемнике соответствующим выбором
частоты гетеродина, стабилизированной кварцем, и промежуточной частоты.
Несущая
частота ответа должна быть 7401,8 МГц
или 10903 МГц. Это следует понимать так. Основная частота
ответа составляет 7401,8 МГц, но должна быть предусмотрена возможность
ответа на частоте 10903 МГц. В зависимости от назначения ответчика его
передатчик может быть настроен либо на 740 МГц, либо на 1090 МГц, либо
предусматривается возможность оперативного переключения частот.
Прием
запросных и излучение ответных сигналов в направлении наземного запросчика
должны обеспечиваться при любом угловом положении самолета относительно
направления на наземный запросчик. Поэтому ДН антенн самолетного ответчика в
горизонтальной плоскости должны быть всенаправленными (круговыми). Диаграммы
направленности в вертикальной плоскости должны обеспечивать работу самолетного
ответчика в пределах углов  относительно
горизонтальной плоскости.
относительно
горизонтальной плоскости.
Для
приема запросных и излучения ответных сигналов на частотах 837,5 МГц и 740 МГц
используется общая приемно-передающая антенна. Применим двухрезонаторную
антенны с одной щелью в каждом резонаторе. Резонаторы со щелями устанавливаются
в киле самолета слева и справа по полету так, что являются зеркальным
отражением друг друга. Запитываются резонаторы через симметрирующий
коаксиальный тройник в противофазе. Результирующая диаграмма направленности в
горизонтальной плоскости близка к окружности с провалами не глубже 0,5  , а в вертикальной плоскости ее ширина около . Щели в резонаторах ориентированы вертикально,
поэтому поляризация волн получается горизонтальной.
, а в вертикальной плоскости ее ширина около . Щели в резонаторах ориентированы вертикально,
поэтому поляризация волн получается горизонтальной.
Для
приема запросных и излучения ответных сигналов в международном диапозоне часто
(1030 МГц и 1090 МГц) используется общий четверьволновый несимметричный
вибратор. Он устанавливается под фюзеляжем в средней части самолета. Вибратор
ориентирован вертикально, поэтому поляризация волн оказывается вертикальной.
диаграммы направленности в горизонтальной плоскости в идеальном случае должна
быть круговой. Однако за счет конфигурации фюзеляжа самолета она оказывается
неравномерной, но не менее 0,4.для
несимметричного заземленного четверьволнового вибратора максимальное значение
коэффициента направленного действия составляет 3,28.
Подведем
итог и запишем тактические данные:
Дальность
действия ВРЛ, км
Максимальная………………………………………………….400
Минимальная,
не более…………………………………….….2
Зона
обзора ВРЛ в вертикальной плоскости, град………..…0,5-45
Разрешающая
способность запросчика:
По
дальности, км……………………………………………….1
По
азимуту в единицах ширины ДН……………………..…..1,2
Ширина
ДН ответчика в вертикальной плоскости, град……….
Ширина
ДН запросчика в горизонтальной плоскости, град….2,5-5
Вероятность
ложной тревоги …………………………………
Вероятность
правильного обнаружения ………………………0,9
.
Расчет технических параметров
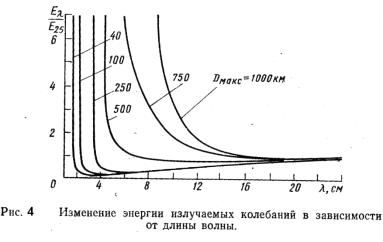
Определение
длины волны  :
:
По
графику (рис.4) зависимости энергии передатчика от длины волны, при заданной
дальности действия - определим длину волны. Энергию излучения  принимаем за единицу, тогда при
принимаем за единицу, тогда при  = 400 км длина волны будет равна =25 см.
= 400 км длина волны будет равна =25 см.
Что
соответствует дециметровому диапазону радиоволн.
Период
повторения импульсов передатчика
исходя из максимальной дальности действия:
 ,где
,где  - коэффициент запаса
- коэффициент запаса
с
- скорость распространения радиоволн 

Тогда
частота повторения импульсов:
FП = 1/TП =
1/0,003 = 333 Гц
Длительность
импульса
Основным
соображением по выбору длительности импульса является обеспечение заданной разрешающей
способности по дальности. От длительности импульса также зависит минимальная
дальность действия Dmin. С
другой стороны уменьшение длительности импульсов приводит к уменьшению
эффективной площади от распределенных объектов.
Длительность
импульса должна быть такой, чтобы разрешающая способность станции по дальности
была равной примерно 1000м.
Исходя
из данных соображений найдем необходимую длительность импульса:
Чувствительность
приемника Pnmin.
Применение
оптимальной обработки сигналов приводит к уменьшению пороговой мощности. Под
пороговой мощностью радиолокационных сигналов понимают минимальную мощность
сигнала на его входе, при которой обеспечивается прием и обнаружение отраженных
сигналов с заданными вероятностями правильного обнаружения и ложной тревоги.
Величина
пороговой мощности радиолокационных сигналов зависит от заданных значений
вероятностей правильного обнаружения  и ложной
тревоги
и ложной
тревоги  , параметров радиолокационных сигналов, времени
наблюдения и вида обработки радиолокационных сигналов.
, параметров радиолокационных сигналов, времени
наблюдения и вида обработки радиолокационных сигналов.
Пороговая
мощность является реальной чувствительностью приемника. Она определяется
выражением:

где:
k - постоянная Больцмана, k = 1.38.10-23Вт.сек/град
Т
- абсолютная температура, Т = 2900С;
 - полоса
пропускания приемника;ш - коэффициент шума приемника;
- полоса
пропускания приемника;ш - коэффициент шума приемника;
D - коэффициент
различимости.
Полоса
пропускания приемника определяется по формуле:
=1/τи
 кГц
кГц
Расчет
коэффициента различимости для модели сигнала со случайной фазой и флюктуирующей
амплитудой:

где
 - отношение сигнал/шум, рассчитываем по формуле:
- отношение сигнал/шум, рассчитываем по формуле:
где
Рлт =10-7 -вероятность ложной тревоги
Рпо
=0,9 - вероятность правильного обнаружения.
 дБ D
= 304/2 = 152
дБ D
= 304/2 = 152
Найдем
чувствительность приемника:
 Вт
Вт
Или
в дБ/мВТ

 )
)  =93 дБ/мВТ
=93 дБ/мВТ
где
Ро=10 Вт - исходный отсчетный уровень
Вт - исходный отсчетный уровень
Рассчитаем
коэффициент направленного действия антенны по формуле:

где
Sэф -
эффективная площадь антенны равная Sэф=0,25·π·l1· l2,
l1 и l2 линейные
размеры антенны, равные 0,05 и 0,1м.
Импульсная
мощность передатчика

5. Принцип
работы самолетного ответчика
Режимы работы ответчика.
“РСП” - режим включается при работе с ДРЛ, не имеющими аппаратуры приема и
отображения информации, поступающей с борта, и ПРЛ, не имеющими аппаратуры
раздельного кодирования запросов по курсу и глиссаде. Режим “РСП” может
использоваться при посадке на аэродром с двумя ПРЛ, диаграммы которых пересекаются.
“УВД” - режим включается при работе с ДРЛ, имеющими аппаратуру отображения
информации, поступающей от ответчика, и ПРЛ, имеющими аппаратуру раздельного
кодирования запросов курса и глиссады. В режиме «УВД» при работе с ДРЛ ответчик
обеспечивает автоматическую передачу информации. Объем передаваемой информации:
бортовой номер - 100000 номеров;
высота - до 30 км (с градацией 10м);
остаток топлива - 16 сообщений.
Для передачи информации о высоте и топливе СО сопрягается с системой
воздушных сигналов (СВС) и топливорасходомером.
“П-35” - режим включается при работе с обзорными РЛС типа П-35.
Выбор режима работы и рабочей волны ответчика производится летчиком перед
полетом в соответствии с полетным заданием или по команде с земли.
Структура
ответного сигнала
В общем случае ответный сигнал содержит координатный код, код ключа и
информационный код. Структура ответного сигнала приведена на рис. 5.2.1.
Структура ответного сигнала в каждом конкретном случае определяется
режимом работы ответчика и видом запросного сигнала. Однако в любом случае
ответный сигнал содержит координатный код. В режиме “УВД” при работе с ДРЛ
ответный сигнал помимо координатного кода содержит код ключа и информационный
код.
Рис. 5.2.1 Структура ответного сигнала СО
При взаимодействии СО с ОРЛ и ПРЛ, а также с ДРЛ в режиме «РСП», ответ
содержит только координатный код. Код ключа и код информации не передается.
Координатный
код
Координатный код (КК) двухимпульсный. Временной интервал между импульсами
зависит от типа запросного сигнала. Однако вид координатного кода может
изменяться при передаче сигналов “Авария” и “Знак”.
Все возможные варианты структуры координатного кода приведены в таблице
1.
Таблица 1
|
ЗАПРОС
|
КООРДИНАТН. КОД
|
КООРД. КОД + “АВАРИЯ”
|
КООРД. КОД + “ЗНАК”
|
|
ОРЛ
|
одноимпульсный
|
tз = 4
мкс
|
не изменяется
|
+ 3й импульс tз32
= 4 мкс
|
|
ДРЛ
|
2х импульсный tз1
= 9.4 мкс tз2 = 14 мкс
|
tз1 =
14 мкс tз2 = 11 мкс
|
+ 3й импульс tз23
= 6 мкс
|
tз =
6 мкс
|
|
ПРЛ
|
2х импульсный tз1
= 3.0 мкс tз2 = 5.4 мкс
|
tз =
9 мкс
|
не изменяется
|
tз =
6 мкс
|
В этой таблице приводится структура КК для различных типов ВРЛ.
При работе с ОРЛ, излучающим запрос в виде одного импульса (частота
2700..3100 МГц), ответ СО содержит только КК - два импульса с интервалом 4 мкс.
Если в кабине пилота включен тумблер «Авария», то вид КК не изменяется. Если же
на ПУ СО нажата кнопка «Знак», то к двум импульсам КК добавляется третий,
задержанный относительно второго на 4 мкс (см.рис.5.3.1).
При работе с ПРЛ ответ СО также содержит только КК с интервалом между
импульсами 9 мкс. Возможны два варианта запросного кода - с интервалами tз1
= 3.0 мкс и tз2 = 5.4 мкс. Причем в
режиме «УВД» один из вариантов означает запрос по курсу, а другой - запрос по
глиссаде. В режиме «РСП» (используется при наличии на аэродроме двух ПРЛ с
пересекающимися ДН) один из ПРЛ использует запрос tз1 =
3.0 мкс, а другой - tз2 = 5.4 мкс. При передаче
сигнала «Авария» ответный КК не изменяется, а при передаче сигнала «Знак»
изменяется временной интервал между импульсами (tз = 6
мкс).
При работе с ДРЛ интервал между импульсами ответного КК будет определяться
видом запросного сигнала. Возможны два варианта запросного кода: с интервалами tз1
=9.4 мкс и tз2 = 14 мкс. При
получении запроса с интервалом tз1=9.4 мкс
(запрос информации о бортовом номере), СО формирует ответный КК с интервалом
tз1=14 мкс. При получении запроса с интервалом tз2
= 14 мкс (запрос информации о высоте полета и остатке топлива),
СО формирует ответный КК с интервалом tз2 = 11 мкс.
При передаче сигнала «Знак» изменяется интервал между импульсами КК (tз
= 6 мкс). В случае передачи сигнала «Авария» к двум импульсам КК
добавляется третий, опережающий второй на tз23 = 6 мкс
(см. рис.5.3.2).
Рис.
5.3.1 Структура ответного сигнала при работе СО с ОРЛ в случае передачи сигнала
«Знак»
Рис.
5.3.2 Структура координатного кода при работе СО с ДРЛ в случае передачи
сигнала «Авария»
Код ключа
и информационный код
В режиме “УВД” при работе с ДРЛ ответный сигнал помимо
координатного кода содержит код ключа и информационный код.
Код ключа - трехимпульсный, его структура различна для каждого из трех
слов информации.
Информационный код (ИК) содержит 20 разрядов двоичного кода,
передаваемых дважды (см. рис. 5.4.1) с целью повышения достоверности
передаваемой информации.
Рис. 5.4.1 Структура информационного кода
Для передачи используется метод “активной паузы” (см. рис.5.4.2): символ
“0” передается импульсом, запаздывающим на 4 мкс относительно того момента
времени, в который бы передавался импульс, обозначающий символ “1”.
Рис. 5.4.2 Временная эпюра, поясняющая принцип формирования двоичного
кода методом «активной паузы»
Интервал времени между импульсами следующими друг за другом,
обозначающими:
1 одинаковые символы “1” или “0” равен
8 мкс;
2 символы “1” и “0” - 12 мкс;
3 символы “0” и “1”- 4 мкс.
Недостатком метода «активной паузы» является необходимость жесткой
привязки к временной оси.
Возможно формирование трех слов информации.
1. Бортовой номер самолета (БН).
2. Высота полета самолета и остаток топлива.
3. Третье слово информации, характеризующее исправность некоторых
бортовых систем, формируется только по запросу, поступающему от командной
радиолинии управления (КРУ). На запуск передатчика СО третье слово не
поступает, а выдается в КРУ по специальной линии.
Для кодирования информации о бортовом номере и высоте полета применяется
двоично-десятичный код. Для передачи одной десятичной цифры используется 4
разряда двоичного кода, объединенных в декаду.
Для передачи БН используются 5 десятичных цифр (от 00000 до 99999),
соответственно все слово информации состоит из 5ти декад (5´4р=20р): 1-я декада (1..4 разряды) -
единицы БН, 2-я декада (5..8 разряды) - десятки БН, 3-я декада (9..12 разряды)
- сотни БН, 4-я декада (13..16 разряды) - тысячи БН и 5-я декада (17..20
разряды) - десятки тысяч БН.
БН выставляется пилотом перед полетом на устройстве набора номера (УНН),
которое представляет собой 5 галетных переключателей, установленных на общем
корпусе, и располагается на правой горизонтальной панели кабины пилота.
Следует отметить, что первое слово называется бортовым номером условно,
т.к. под БН отводятся только 2 десятичных числа, а еще 3 десятичных числа
выделяются под личный номер пилота.
Второе слово информации несет информацию о высоте полета самолета и
остатке топлива. Код высоты занимает 14 разрядов: три декады (1-12
разряды) для кодирования цифр десятков, сотен и тысяч метров и 2 разряда (13 и
14) для передачи цифр десятков километров высоты. При помощи двух разрядов
двоичного кода можно закодировать 4 значения: 0, 10, 20, 30 км. Если к
максимальному значению 30 км добавить максимальное значение высоты, кодируемое
в первых 12 разрядах, то получим, что ответчик может передавать информацию о
высоте от 0 до 39990м с шагом 10м.
-й и 16-й разряды 2 слова информации отводятся для передачи разовых
сообщений - абсолютная высота и «Авария». Передача символа «1» в каком-либо из
этих разрядов означает передачу того сообщения, для которого отводится этот
разряд. Так передача символа «1» в 15м разряде означает то, что в
предыдущих четырнадцати разрядах передается значение абсолютной высоты, «0» -
относительной. Наличие «1» в 16-м разряде означает то, что на борту включен
тумблер «Авария».
Для передачи сведений об остатке топлива используется специальный 4х
разрядный код, передаваемый в 17-20 разрядах 2го слова информации.
При помощи 4-х разрядов двоичного кода можно передать 16 сообщений. Каждому из
этих сообщений будет соответствовать определенное значение остатка топлива в
процентах (1 сообщение - 0…5% -аварийный остаток топлива, 16 сообщение -
90…100% - полная заправка топливом).
6. Принцип
действия СО по структурной схеме
Принцип действия ответчика заключается в приеме запросных сигналов наземных
РЛС и автоматическом излучении ответных кодированных сигналов.
Структурная схема СО приведена в приложении №1.
Рассмотрим принцип действия СО по структурной схеме в различных режимах
работы с ДРЛ, ПРЛ и ОРЛ.
Работа ответчика с ДРЛ осуществляется в режимах “РСП” и “УВД”.
Запросные сигналы ДРЛ частотой 835…840 МГц горизонтальной поляризации,
принятые АФС «Пион-НМ», через ВЧ фильтр ВТ-010 поступают на вход
приемопередатчика (ПП), входящего в состав блока СО.
На другой вход ПП поступают запросные сигналы ДРЛ частотой 1030 МГц
вертикальной поляризации, принятые антенной типа АМ-002М.
С выхода приемопередатчика усиленные и продетектированные сигналы
поступают на вход шифратора (Ш), где осуществляется подавление запросов от
боковых лепестков ДН антенны ДРЛ, декодирование запросных кодов ДРЛ и
формирование видеоимпульсов ответных сигналов.
Для формирования информационного кода в режиме «УВД» Ш использует данные,
поступающие от устройства набора номера, барометрического высотомера,
топливорасходомера и других бортовых систем и датчиков.
Информационный код передается с “разрядкой”, т.е. на каждый запрос ДРЛ в
режиме «УВД» излучается ответ, содержащий только координатный код, а один раз
на 8…12 запросов излучается полный ответ, содержащий КК, код ключа и ИК. Это связано
с тем, что если ответный сигнал содержит только КК, его максимальная
длительность составляет 14 мкс. В случае формирования полного ответа,
содержащего КК, код ключа и ИК, длительность сигнала составляет 360 мкс.
Естественно, что в первом случае вероятность наложения ответных сигналов от
нескольких самолетов, находящихся на одном азимуте относительно ДРЛ и небольшом
удалении друг от друга, в тракте приемника ДРЛ значительно меньше. Это
обеспечивает высокую разрешающую способность ДРЛ по дальности.
Видеоимпульсы ответного кода с Ш поступают на запуск передатчика (блок
приемопередатчика), вырабатывающего ВЧ импульсы ответного сигнала. Эти импульсы
по общему приемопередающему тракту поступают либо через фильтр ВТ-010 на АФС
«Пион-НМ» (если передатчик настроен на частоту 730…750 МГц), либо на антенну
АМ-002М (если передатчик настроен на частоту 1030 МГц). ВЧ фильтр ВТ-010
предназначен для дополнительного подавления внеполосного излучения передатчика.
Работа ответчика с ПРЛ осуществляется в режимах “РСП” и “УВД”.
Запросные сигналы ПРЛ, принятые антеннами 1го и 2го
диапазонов типа А3-041 на частоте 9370 МГц и продетектированные в детекторных
секциях, расположенных в непосредственной близости от антенн, поступают на вход
блока посадочных сигналов (БПС), в котором осуществляется их усиление,
декодирование и подавление запроса от боковых лепестков ДН ПРЛ. С БПС сигнал
поступает в Ш, где формируется ответный сигнал (координатный код) для ПРЛ,
поступающий затем на запуск передатчика. Работа передающего тракта при взаимодействии
СО с ДРЛ, ПРЛ и ОРЛ идентична.
Работа ответчика с ОРЛ осуществляется в режиме “П-35”.
Запросные сигналы ОРЛ, принятые антеннами 1го и 2го
диапазонов типа А3-041 на частоте 2700…3100 МГц и продетектированные в
детекторных секциях, поступают на входы БПС. Усиленные сигналы из БПС поступают
в Ш, где формируется ответный сигнал (координатный код) для ОРЛ, поступающий
затем на запуск передатчика.
Для повышения надежности работы СО на некоторых типах ЛА используется
резервирование БПС (устанавливается два БПС).
В передатчике формируются импульсы для бланкирования других бортовых
систем на время ВЧ излучения ответчика. Импульсы бланкирования могут поступать
либо непосредственно с блока СО, либо через приставку усилительную. Для
исключения срабатывания СО от помех, создаваемых передатчиками других систем
(непосредственно или через приставку бланкирования) производится запирание
входа шифратора и приемных каналов 1го и 2го диапазонов в
БПС.
По запросам от бортовых систем в Ш может происходить формирование
информационного кода, который выдается в соответствующую систему.
Передатчик ответчика может запускаться сигналами, поступающими от других
бортовых систем по цепи “Внешний запуск”.
Контрольные ВЧ и НЧ разъемы служат для подключения контрольной
аппаратуры.
7. Принцип
работы СО по функциональной схеме
Принцип
работы СО в режимах «РСП» и «УВД» с диспетчерскими РЛС
Функциональная схема СО представлена поблочно в приложениях №2…5.
Принятые антеннами вертикальной и горизонтальной поляризации запросные
сигналы 3-го диапазона частот поступают на входы 1Ф1 и 1Ф2
двухканального супергетеродинного приёмника блока приемопередатчика (см.
приложение №2). Первый канал обеспечивает приём сигналов на частоте 1030 МГц,
второй - на частоте 835-840 МГц (среднее значение 837,5 МГц).
Для проверки чувствительности приёмника и мощности передатчика имеются
два контрольных ответвителя с ослаблением ~17дБ (1Ф3 и 1Ф4).
Частотная селекция входного сигнала обеспечивается двумя полосовыми
фильтрами (преселекторами), находящимися в блоке ВЧ.
В смесителе осуществляется частотное преобразование принятого сигнала.
Причем значение частоты сигнала гетеродина определяется как
среднеарифметическое значений частот двух приемных каналов fг=(1030+837,5)/2=
=933,75МГц, что позволяет добиться одинакового значения промежуточной частоты
для обоих каналов fпр =1030-933,75=933,75-837,5=96,25МГц. При
этом канал 837,5МГц будет являться зеркальным для канала 1030МГц и наоборот.
Преобразованный по частоте сигнал поступает на усилитель промежуточной
частоты. Во втором каскаде УПЧ предусмотрена регулировка усиления, 3-7 каскады
дополнительно нагружены на детекторы, сигналы с которых складываются на
сумматоре, что обеспечивает получение логарифмической амплитудной
характеристики (зависимости Uвых от Uвх). Такой характеристике
свойственно отсутствие амплитудного ограничения выходных сигналов усилителя в
широком динамическом диапазоне входных сигналов. Это необходимо для устойчивой
работы схемы подавления запросов от боковых лепестков ДН антенны ДРЛ.
С выхода УПЧ усиленные и продетектированные запросные сигналы поступают
на вход шифратора через амортизационную раму. Для упрощения описания принципа
действия шифратора СО его функциональная схема разбита на 2 части («Шифратор» и
«Шифратор-2») и приведена в приложениях №3 и №4. Элементы схемы «Шифратор»
обеспечивают декодирование запроса ДРЛ и формирование ответного координатного
кода, а схемы «Шифратор-2» - формирование кода ключа и информационного кода.
На входе схемы «Шифратор» установлены схема регулирования
порога и схема ограничения загрузки 3-го диапазона, которые определяют
чувствительность СО. Однако в некоторых случаях необходимо осуществлять
«загрубение» этого значения. Такая необходимость возникает тогда, когда самолет
находится в зоне действия нескольких ДРЛ. Взаимодействие с каждым из них может
привести к перегреву передатчика СО из-за его частого запуска. Если температура
передатчика достигнет некоторого верхнего предельного значения схема выдержки
времени и ограничения загрузки блока приемопередатчика отключит его, чтобы не
допустить его поломки. При этом отметка самолета исчезнет с экранов наземных
диспетчерских служб и появится лишь тогда, когда передатчик начнет работать
(температура передатчика снизится до заданного значения). Для того чтобы
избежать отключения передатчика используют схемы регулирования порога и
ограничения загрузки, которые работают по пороговому принципу и пропускают лишь
наиболее мощные сигналы от ДРЛ, расположенных наиболее близко к самолету. Порог
ограничителя загрузки определяется количеством и амплитудой декодированных
запросов.
Схема амплитудного сравнения 3-х импульсного подавления сравнивает
амплитуды импульсов запроса Р1, Р3 и подавления Р2. Если амплитуда импульса
подавления Р2 меньше амплитуды импульсов запроса Р1 и Р3 на 9 и более децибел
(принимается сигнал от главного лепестка ДН антенны ДРЛ), то импульс Р2
подавляется и далее проходят только импульсы Р1 и Р3. В противном случае
(принимается сигнал от бокового лепестка ДН) дальше проходят все три импульса.
Схема бланкирования не пропускает запросные сигналы при поступлении
сигнала “Бланк-å“ с целью исключения срабатывания ответчика от помех, создаваемых
передатчиками других бортовых систем.
В схеме формирования “Бланк-å“ объединяются и нормируются импульсы бланкирования, поступающие
как из самого ответчика, так и из других бортовых систем.
В нормирователе запросные сигналы нормируются по амплитуде и
длительности.
Декодирование запросных сигналов ДРЛ осуществляется на линии задержки
декодирования, которая представляет собой микросхему с одним входом и
множеством выходов. В случае отсутствия сигнала на входе микросхемы на всех ее
выходах будет напряжение, соответствующее логическому «0». При поступлении на
вход импульса запроса на выходах микросхемы последовательно, начиная от вывода,
соответствующего минимальной задержке, будет появляться напряжение
соответствующее логической «1».
Декодирование запроса, состоящего из двух импульсов с интервалом 9.4 мкс,
происходит следующим образом. К моменту поступления на линию задержки декодирования
второго импульса запроса первый импульс успевает продвинуться по ней до отвода,
соответствующего задержке 9.4 мкс. В случае появления напряжения логической «1»
на отводах линии задержки 0 и 9,4 мкс срабатывает схема совпадения «И»
(декодирование 9,4 мкс), т.е. происходит декодирование запроса. Аналогичным
образом декодируется запрос с интервалом между импульсами 14 мкс.
В случае когда принят запрос от бокового лепестка ДН антенны ДРЛ на линию
задержки декодирования поступают три импульса Р1, Р2 и Р3. Т.к. временной
интервал между импульсами Р1и Р2 составляет 2 мкс, то срабатывает схема
совпадения «И» (декодирование 2 мкс) и формирователь запрета вырабатывает
сигнал, запрещающий декодирование запросных кодов. Таким образом осуществляется
подавление запросов от боковых лепестков ДН антенны ДРЛ.
Если на пульте управления ответчика выбран режим «УВД» и декодирован
запрос ДРЛ 9,4 мкс, то ответный сигнал СО будет содержать координатный код
(интервал 14 мкс) (см. таблицу 3), код ключа и информационный код бортового
номера. В случае декодирования запроса 14 мкс - координатный код (интервал 11
мкс), код ключа и информационный код высоты полета и остатка топлива.
Если же на пульте управления ответчика выбран режим «РСП», то ответ
содержит только координатный код (при декодировании запроса 9,4 мкс с
интервалом 14 мкс, при декодировании запроса 14 мкс с интервалом 11 мкс).
Декодированный запрос со схем совпадения «И» поступает на соответствующий
отвод линии задержки кодирования для формирования ответного координатного кода,
а также через схему сложения «ИЛИ» на ограничитель загрузки 3-го диапазона,
задача которого определить количество декодированных запросов в единицу
времени.
Ответный координатный код (КК) формируется с помощью линии задержки
кодирования. В ответ на запросы ДРЛ и ПРЛ (режимы «УВД» и «РСП») КК снимается с
отвода 19 линии задержки кодирования, а в ответ на запрос ОРЛ (режим «П-35») -
с 3-го отвода. Далее координатный код поступает на вход диодных схем сложения
«ИЛИ», на другой вход которых могут поступать дополнительные импульсы в случае
передачи сигналов «Авария» или «Знак» (структура КК в различных ситуациях
приведена в таблице №3). Выбор схемы сложения «ИЛИ», с которой снимается КК,
осуществляется реле Р2-6.
Реле Р2-1, Р2-2 и Р2-3 позволяют сформировать КК заданного вида при
передаче сигнала «Знак» в режимах «УВД» и «РСП».
Сформированный ответный координатный код через контакты реле Р2-6, Р2-7 и
схему «ИЛИ» поступает одновременно на схему индикации схемы «Шифратор-2»
(через нормально замкнутые контакты реле Р7-2) и коммутирующее устройство. С
выхода коммутирующего устройства сигналы поступают на подмодулятор
приемопередатчика, где нормируются по длительности и усиливаются по мощности. В
подмодуляторе вырабатываются также импульсы бланкирования, поступающие в другие
бортовые системы. При необходимости бланкирования других систем импульсами с
иными параметрами, эти импульсы поступают на приставку усилительную, задача
которой - сформировать импульсы заданной формы.
Импульсы модулятора возбуждают колебания задающего
генератора, которые затем усиливаются по мощности и по ВЧ тракту через ФНЧ и
фильтр ВТ-010 поступают в антенну. ФНЧ и фильтр ВТ-010
предназначены для подавления внеполосного излучения передатчика.
Во время излучения передатчиком ВЧ сигнала, на входе приёмных каналов СО
наводится сигнал, который усиливается УПЧ и поступает на вход шифратора. Схема
бланкирования не пропускает его на линию задержки декодирования, но со входа
схемы ограничения загрузки 3-го диапазона этот сигнал поступает на схему индикации,
расположенную в схеме «Шифратор-2». В схеме индикации происходит совпадение по
времени этого сигнала и видеоимпульсов координатного кода, поступающих с выхода
шифратора (схемы «ИЛИ»), в результате чего схема индикации срабатывает и в
кабине пилота загорается лампочка «Контроль СО». Пилот по свечению этой
лампочки может судить о работоспособности СО.
При использовании общего приемопередающего тракта возникает необходимость
разделения сигналов частот передатчика и приёмника для того, чтобы мощный сигнал
передатчика не попал в тракт приемника и не вывел его из строя, а принимаемый
сигнал не попал в тракт передатчика, тем самым, шунтируя приемник и снижая его
чувствительность. В данном случае эта проблема решается при помощи
частотноразделительных тройников, образуемых отрезками коаксиальных
линий. Принцип работы этих тройников заключается в следующем. Длина
коаксиального кабеля от общей точки приемопередающего тракта до входа
полосового фильтра выбирается такой, чтобы обеспечить максимально высокое сопротивление
для сигнала частоты передатчика, благодаря чему энергия передатчика почти
полностью направляется в антенну. Длина коаксиального кабеля от общей точки до
входа передатчика Ф7 (включая фильтр нижних частот и соединительный кабель)
выбирается такой, чтобы обеспечить максимально высокое сопротивление для
сигнала приёмных частот, благодаря чему энергия принимаемого сигнала почти
полностью направляется на вход приёмника.
Мощность передатчика в импульсе составляет не менее 250 Вт. Передатчик
настраивается на 2 любые частоты из 4-х возможных. Переключение частоты
осуществляется с пульта управления тумблером «Волны».
Схема выдержки времени и ограничения загрузки обеспечивает
автоматическое выключение передатчика при его перегреве из-за большой частоты
запуска.
В режиме «УВД» в ответ на запрос ДРЛ кроме координатного кода, ответчик
вырабатывает код ключа и информационный код.
Принцип
работы СО в режиме «П-35»
Взаимодействие СО с ОРЛ осуществляется в режиме «П-35». При этом запросы
ОРЛ также как и запросы ПРЛ обрабатываются в блоке посадочных сигналов. Однако
в отличие от запросов ПРЛ, запросы ОРЛ не декодируются, т.к. ОРЛ излучает
одноимпульсный запрос (см. таблицу 1). Кроме того, в режиме «П-35» не ведется
борьба с запросами от боковых лепестков диаграммы направленности ОРЛ.
Рассмотрим цепь прохождения сигнала в режиме «П-35».
Принятые антеннами 2-го диапазона и продетектированные в детекторных
секциях запросы ОРЛ поступают на входы 2Ф5-2Ф8 БПС. Через схему сложения
сигналов 2-го диапазона и нормально разомкнутые контакты реле Р1-1 сигналы
далее поступают на логарифмический усилитель видеосигналов и схемы сравнения
каналов 3,0 и 5,4 мкс. Ввиду того, что запрос ответчика в режиме «П-35»
производится одноимпульсным сигналом, пороговое напряжение в каналах не вырабатывается
(схемы декодирования запросов 3,0 и 5,4 мкс закрыты), и сигналы запроса
беспрепятственно проходят через схемы сравнения на усилители цепей
декодирования запроса каналов 3,0 и 5,4 мкс. Далее через схему бланкирования,
формирователь, нормально разомкнутые контакты реле Р3-1 и выход БПС (2Ф10)
импульсы запроса поступают на вход 1Ф9 (от БПС-1) шифратора.
В шифраторе запросы ОРЛ проходят по следующей цепи: схема «ИЛИ»,
нормально замкнутые контакты реле Р4-5, схема регулирования порога, нормально
разомкнутые контакты реле Р1-1, нормирователь видеосигналов, нормально
разомкнутые контакты реле Р1-2. Далее сигнал одновременно поступает на
ограничитель загрузки 1-го и 2-го диапазонов, а также на линию задержки
кодирования. Ограничитель загрузки 1-го и 2-го диапазонов выполняет ту же роль,
что и ограничитель загрузки 3-го диапазона. Сформированный на линии задержки
кодирования ответный сигнал (координатный код) через схему «ИЛИ координатные
коды П-35», нормально разомкнутые контакты реле Р2-6, нормально замкнутые
контакты реле Р2-7, схему «ИЛИ» и коммутирующее устройство подается на запуск
передатчика.
В случае, когда пилот нажимает кнопку «Знак» к двум
импульсам координатного кода посредством схемы совпадения «И» и схемы сложения
(«ИЛИ координатный код П-35») добавляется третий импульс (см. таблицу 1).
8. Разработка функциональной схемы передатчика
Передатчик предназначен для генерирования ВЧ импульсов в дециметровом
диапазоне волн.
Функциональная схема передатчика приведена на рис. 8.1
Модулятор представляет собой мощный транзисторный ключ, который
открывается импульсами положительной полярности, поступающими от подмодулятора,
и отпирает лампу задающего генератора. Запускающий импульс подмодулятора имеет
на спаде выброс отрицательной полярности, ускоряющий запирание задающего
генератора после окончания импульса. Вырабатываемые задающим генератором ВЧ
колебания усиливаются вторым каскадом и через разделительный фильтр приемника поступают
в антенну.
Автономные источники питания включают в себя трансформатор накала,
низковольтный и высоковольтный выпрямители.
Трансформатор накала и низковольтный выпрямитель питаются
стабилизированным напряжением ~115 В и включаются одновременно с включением
ответчика. Питание накала ламп осуществляется от отдельных обмоток
трансформатора, так как в в лампе нить накала соединена с катодом, а катоды
ламп находится под разными потенциалами.
Высоковольтный выпрямитель питается стабилизированным напряжением 115В
через схему выдержки времени и включается с задержкой 25-100 с относительного
момента включения ответчика.
Рис. 8.1 Функциональная схема передатчика
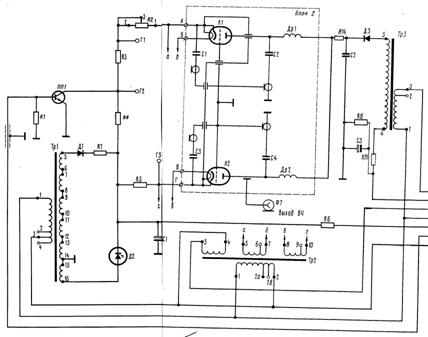
Электрическая принципиальная схема передатчика приведена на рис. 8.2
Задающий генератор и усилитель мощности работают на металлокерамических
триодах, включенных по схеме с общей сеткой. Импульсная модуляция передатчика
осуществляется по катодной цепи лампы задающего генератора (Л1).
Катоды обеих ламп генератора и коллектор транзистора модулятора находятся
под положительным напряжением 55-65 В, поступающим от низковольтного
выпрямителя. В отсутствии запускающего импульса модулятор и лампы генератора
заперты. Запускающие импульсы амплитудой 1-2 В поступают на базу модуляторного
транзистора и открывают его. Катодная цепь лампы задающего генератора
заземляется через открытый транзистор модулятора, и задающий генератор
самовозбуждается.
Высокочастотные колебания из анодного контура задающего генератора
поступают в катодный контур усилителя мощности, усиливаются вторым каскадом
(Л2) и поступает на выход передатчика.
Резисторы R2 и R3 обеспечивают автоматическое
смещение в цепи катода лампы задающего генератора на время его работы. Кроме
того, резистор R3 служит для
замера тока катода лампы Л1.
Резистор R5 служит для
замера тока в цепи лампы Л2.
Резистор R1 согласует вход
модулятора с выходом подмодулятора.
Резистор R4 служит
коллекторной нагрузкой модулятора.
Низковольтный выпрямитель собран на трансформаторе Тр1 и на диоде Д1.
Напряжение выпрямителя стабилизируется стабилитроном Д2 с балластным
резистором R7 и фильтрующей емкостью С1.
Высоковольтный выпрямитель, собранный на трансформаторе Тр3 и диоде Д3 с
накопительной емкостью С2, выдает напряжение 1200-1300В.
Резистор R8 с резисторами R1 и R2 включены в цепь постоянного составляющей анодного тока ламп
передатчика и служат для определения степени загрузки передатчика.
Конденсатор С3 - выравнивающий.
Схема электрическая принципиальная передатчика.
Расчет автогенератора
Исходными данными для проектирования и расчета схем ГВВ на
металлокерамической лампе являются:
выбранный тип лампы, выходная мощность P1, рабочая частота f, справочные данные лампы.
Справочные данные выбранного прибора в таблице. 2.
Таблица №2
|
Тип прибора
|
Номинальная мощность
|
Минимальная длина
|
Напряжение питания анода
|
Напряжение накала
|
Ток цепи накала
|
Ток анода
|
|
|
Рном, кВт
|
λmin см
|
Еа, В
|
Un, B
|
Iн, А
|
Ia, A
|
|
Ги-25
|
4
|
29,8
|
30
|
12,6
|
0,93
|
5
|
Первым этапом проектирования является выбор схемы генератора. Схема ГВВ
является схема с общей сеткой, которая чаще применяется в СВЧ диапазоне. Схема
ГВВ приведены на рис. 8.2.
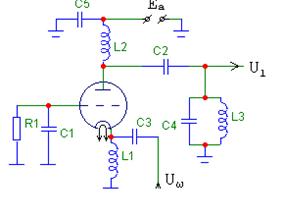
Рис.
8.2
На
рисунках приведена схема с автоматическим смещением на резисторах R1, с
параллельным типом питания анодных цепей. На индуктивностях L1
выделяется входное высокочастотное напряжение возбуждения. Конденсатор С1
заземляет сетку на корпус по ВЧ.
Сначала произведем расчет электронного режима работы ГВВ.
Зададимся углом отсечки тока лампы Θ, оптимальным значением, которого
является Θ Θ 70…120°. Для выбранного угла Θ определим коэффициенты Берга
a1 и a0. Выбирем величину Ea источника питания, близкую к типовому
значению.
Угол отсечки тока лампы Θ=80°
Коэффициенты Берга a1=0,473
a0=0,286
Ea=27 В
Рассчитаем величину граничного коэффициента использования анодного
напряжения для схемы с общей сеткой (ОС) расчет производится по формуле:

где: D-проницаемость
лампы, равна 1,15%; S-крутизна входных характеристик лампы, равна 19,5 А/В;
Sгр -
крутизна граничного режима, равна 0,006 А/В

Определим
амплитуду Ua1 - первой
гармоники напряжения на лампе

 В
В
Амплитуда
тока первой гармоники на лампе

 А
А
Постоянная
составляющая тока лампы
 А
А
Требуемое
напряжение возбуждения на сетке

 В
В
Эквивалентное
выходное сопротивление ГВВ

 Ом
Ом
Напряжение
смещения на сетке
 ,
,
где
 - напряжение приведения, равное примерно напряжению
запирания лампы, равно 12 В.
- напряжение приведения, равное примерно напряжению
запирания лампы, равно 12 В.
 В
В
Расчет
параметров сеточной цепи:
Угол
отсечки тока сетки
 °
°
Ток
первой гармоники цепи сетки и ток постоянной составляющей
 ,
,  ,
,
где
 - крутизна сеточной характеристики, при отсутствии
справочного параметра, ориентировочно можно положить
- крутизна сеточной характеристики, при отсутствии
справочного параметра, ориентировочно можно положить =1,95.
=1,95.
 А
А
 А
А
Мощность
возбуждения и постоянной составляющей
 Вт
Вт
 Вт
Вт
Мощность,
рассеиваемая на сетке
 .
.
 Вт
Вт
Входное
сопротивление цепи сетки
 Ом
Ом
Коэффициент
усиления ГВВ по мощности

Коэффициент
обратной связи, необходимый для обеспечения электронного режима в случае работы
каскада как автогенератора СВЧ:

Энергетические
параметры:
 -потребляемая
от источника питания мощность,
-потребляемая
от источника питания мощность,
 Вт
Вт
 -мощность
рассеяния на лампе,
-мощность
рассеяния на лампе,
 Вт
Вт
 -электронный
КПД
-электронный
КПД
Расчет
элементов схемы (рис.3.1 а))

 мкГн
мкГн

 мкГн
мкГн

 мкФ
мкФ

 Ом
Ом
 пФ
пФ

 мкГн
мкГн

 мкФ
мкФ

 мкФ
мкФ
В
этих формулах:  - минимальное значение рабочей частоты передатчика,
- минимальное значение рабочей частоты передатчика,  - рабочая частота ГВВ,
- рабочая частота ГВВ,  -
емкость анод-сетка лампы.
-
емкость анод-сетка лампы.
На этом расчет генератора СВЧ закончен
Заключение
С целью обеспечения безопасности движения авиационного транспорта и
управления воздушным движением диспетчерским составом в данном курсовом проекте
был разработан самолетный ответчик системы вторичной радиолокации.
Были выбраны и рассчитаны основные тактико-технические характеристики
самолетного ответчика и разработана её структурная схема.
Тактико-технические характеристики спроектированного самолетного
ответчика удовлетворяют техническому заданию и не противоречат нормам и
требованиям по технической эксплуатации. В дальнейшем курсовой проект может
быть применен для разработок и внедрения в производство.
Список литературы
1. М.И. Финкельштейн. Основы радиолокации. Москва, «Советское
радио», 1973.
. Э.А. Лутин. Радиолокационные системы. Пособие к изучению
дисциплины, контрольные задания и задания на курсовой проект.
. Перевезенцев Л.Т., Зеленков А.В., Огарков В.Н.
Радиолокационные системы аэропортов. М. Транспорт,1981.
. Васин В.В. Справочник-задачник по радиолокации. М.:
Советское радио, 1977.