Мережі синхронізації. Побудова мережі синхронізації України
МІНІСТЕРСТВО
ОСВІТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ
УНІВЕРСИТЕТЕ "ЛЬВІВСЬКА ПОЛІТЕХНІКА"
Інститут
телекомунікацій, радіоелектроніки та електронної техніки
Кафедра
"Телекомунікацій"
Курсова
робота
з
дисципліни "Телекомунікаційні системи передачі, частина 2"
На
тему: "Мережі синхронізації. Побудова мережі синхронізації України"
Львів
- 2015
Вступ
. Характеристика пристроїв синхронізації
.1 Автогенератори
.2 Основні типи пристроїв синхронізації (генераторів
тактових імпульсів)
.3 Принципи фізичної реалізації стандартів частоти
.4 Активні та пасивні атомні стандарти частоти
. Параметри сигналів на виходах пристроїв
синхронізації
.1 Точність
.2 Точність значущих моментів
.3 Стабільність
.4 Дисперсія Аллана по часу
. Нормовані параметри сигналів синхронізації
.1 Максимальна помилка часового інтервалу
.2 Девіація часового інтервалу ДЧІ(т) і стандарт
відхилення часового
інтервалу ПВІ
. Лінійна модель зміни частоти. Дослідження зв’язку
фази і частоти сигналу при дрейфі частоти
.1 Дрейф частоти
.2 Зв'язок між фазою і частотою сигналу при лінійному
дрейфі частоти
.3 Поведінка параметрів генераторів у часі
. Дослідження впливу просковзування на якість передачі
інформації
5.1 Проковзування при передачі різних видів інформації
5.2 Допустима величина проковзування
. Побудова мережі синхронізації України з урахуванням
вимог МСЕ-Т
.1 Еталонна модель мережі синхронізації
.2 Принцип побудови мережі синхронізації України
Висновки
Список рекомендованої літератури
синхронізація частота сигнал інформація
Вступ
Мережа синхронізації є мережею підтримки цифрової мережі
зв’язку. Проблеми, пов'язані з синхронізацією, виникли одразу з появою цифрових
методів передачі інформації. Проблеми планування мереж синхронізації,
забезпечення їх функціонування у різноманітних умовах з відповідною надійністю
постали перед операторами зв’язку України. Дійсно, будь-яка процедура
дискретизації, передачі й прийому даних у виглядi цифрового сигналу вимагає
погодженості частот передачі й прийому, у будь-якому іншому разі передана інформація
не буде прийнята коректно. Синхронізація цифрових мереж зв’язку є необхідною
для забезпечення двох умов інформаційного обміну між користувачами, які є
базовими для цифрових технологій:
1)
безперервність:
середнє значення швидкості передавання (приймання) інформації має бути
однаковим в пов’язаних між собою кінцевих пристроях;
2)
цілісність:
інформаційні блоки в кінцевому пристрої приймання мають з’являтися в тій самій
послідовності, з якою їх відправляли з кінцевого пристрою передавання.
Подальший розвиток цифрового зв’язку спряє пошук нових
розробок та вдосконалень обладнання мереж синхронізації та принципів планування
мереж синхронізації.
1. Характеристика
пристроїв синхронізації
1.1 Автогенератори
Сучасні генератори, прилади синхронізації або, як ще
говорять, "годинник" легше зрозуміти виходячи із загальних принципів
роботи добре знайомого годинника і генераторів.
Визначення, що вже стало класичним, називає автоколивальною
систему перетворення енергії постійних джерел в енергію коливань. Необхідним
елементом будь-якої автоколивальної системи є наступні функціональні частини:
) власне коливальна система;
) елемент, що управляє вступом енергії в коливальну систему,
який умовно називають клапаном;
) ланцюг зворотного зв'язку між коливальною системою і
клапаном;
) джерело постійної енергії.
Усі типи сучасного устаткування синхронізації (чи, як їх
іноді називають, годинник) містять власний генератор коливанні (автогенератор')
з внутрішнім джерелом енергії. У автогенераторі, джерелі коливань можуть бути
використані періодичні явища будь-якого типу. З курсу теорії ланцюгів широко
відомі LC або RC автоколивальні системи на електронних лампах або транзисторах.
У сучасних автоколивальних системах використовуються коливання атомів в
кварцевих резонаторах або квантові переходи, що виникають при опроміненні
(накачуванню) в атомних
генераторах.
Частини автоколивальної системи знаходяться між собою у
взаємодії, яка полягає в тому, що з одного боку клапан управляє рухом
коливальної системи і підкочуванням енергії, а з іншого боку, рух системи
управляє роботою клапана. Це управління здійснюється по ланцюгах зворотного
зв'язку.
У внутрішніх джерелах енергії може використовуватися,
наприклад, потенційна енергія гирь в механічному годиннику, стисла пружина або
джерело постійного струму - батарея в наручному годиннику.
У одних випадках перераховані функціональні елементи можна
виділити в явному виді, в інших вони поєднані так. що їх функції не відразу
очевидні, але в тій або іншій формі вони властиві кожній автоколивальній
системі.
Сучасні реалізації високоточного генераторного устаткування
містять але декілька АКС, різні системи рахунку коливань, індикації,
внутрішньої синхронізації, наприклад, атомною КС кварцевого ГУН і або систему
прив'язки до глобальної навігаційної системи, а також функції оцінки якості
коливань, управління резервуванням і т. д..
.2 Основні типи пристроїв синхронізації (генераторів тактових
імпульсів)
Використовувані сучасні промислові пристрої синхронізації
включають кварцеві, рубідієві, цезієві і водневі пристрої. Приблизно у такому ж
порядку зростає їх вартість. Генератори тактової частоти - автогенератори,
використовувані в сучасних облаштуваннях синхронізації цифрових систем зв'язку,
розрізняють:
1) за принципом фізичної реалізації коливальної системи:
· кварцеві;
· атомні: на цезієвих пучках, на
рубідієвих газових комірках, водневі або оптичні лазери.
2) по якості генерованого сигналу і функціях, що
виконуються в мережі:
· первинні;
· вторинні;
· місцеві;
· відомі і ведені;
· загальностанційні - головні для
всього обладнання електрозв’язку в даній будівлі або комплексі будівель.
Первинний стандарт частоти (в українській термінології ПЕГ -
первинний еталонний генератор) - це джерело стандартної частоти, яке не
потребує регулювання з боку іншого еталонного задаючого генератора. Приклади
первинних стандартів частоти - атомні стандарти на цезієвих пучках і водневі
квантові підсилювачі (мазери).
Вторинний стандарт частоти (в українській термінології ВЗГ -
вторинний задаючий генератор) - це джерело стандартної частоти, яка може
регулюватися (і зазвичай регулюється) за деяким первинним стандартом.
Прикладами вторинних стандартів частоти є високоякісні кварцеві генератори, а
також атомні стандарти на рубідієвих газових осередках. Вторинні облаштування синхронізації
у свою чергу діляться за якістю і місцю в мережі.
.3 Принципи фізичної реалізації стандартів частоти
Кварцеві генератори:
Кварцеві генератори складають основу технологій часу і
частоти. Кварцеві генератори (англійське позначення: ХО - Crystal Oscillator)
грунтовані на ефекті п'єзоелектрики : під впливом змінного електричного поля в
кристалі кварцу (резонаторі) поширюються механічні деформації. Коли акустичні
хвилі задовольняють заданим граничним умовам, кристал входить в резонанс.
Діапазон частоти резонансу - від 10 кГц до 1 ГГц, але частіше всього від 5 до
10 Мгц. Кварцевий резонатор включається в ланцюг позитивного зворотного зв'язку
для збудження і підтримки коливань : в стійкому стані на частоті резонансу
зрушення фази в замкнутому ланцюзі складає 0 або 1, і амплітуда коливань
постійна. Отриманий таким чином сигнал синхронізації характеризується високою
короткочасною стабільністю.
Окрім описаної вище простої моделі кварцевого генератора
існують складніші варіанти, що дозволяють отримати синхросигнал більш високої
якості.
· Кварцеві генератори з температурною компенсацією (ТСХО -
Temperature - Compensated Crystal Oscillator) автоматично
управляють частотою коливань відповідно до змін температури кристала.
· Термостатовані кварцеві генератори
(ОСХО - Oven - ControlledOscillator) забезпечують роботу в
закритому середовищі з постійною температурою. Резонатор і інші чутливі до
температури елементи поміщаються в керований термостат, температура в якому
встановлюється як можна ближчою до точки, в якій частота резонатора не залежить
від температури. Це дозволяє мінімізувати вплив залишкових температурних змін.
Широке поширення кварцевих генераторів обумовлене, в першу
чергу, зручністю використання кварцу. Цей матеріал можна вирощувати у великих
кількостях, при низькій вартості, зі значною хімічною чистотою і високою
досконалістю кристалічної решітки. Крім того, кварц має низькі електричні
втрати. Завдяки цьому практично усі сучасні системи електрозв'язки
використовують кварцеві генератори. Дешеві кварцеві генератори забезпечують
синхросигналами устаткування цифрових систем зв'язку, а високоякісні
використовуються в стандартах частоти.
Число кварцевих генераторів, використовуваних навіть в самих
високо-технологічних застосуваннях, дуже велике. Їх число явно перевершує число
атомних стандартів на декілька порядків. Хоча їх довготривала стабільність і
відхід частоти набагато нижче в порівнянні з аналогічними параметрами атомних
стандартів, кварцеві прилади широко затребувані із-за їх низької вартості,
малої ваги і невеликих розмірів, високої надійності і малої споживаної
потужності.
Атомні стандарти частоти:
Атомні генератори використовують як еталон частоти коливання
електромагнітного сигналу, і засновані на квантовому переході між двома
енергетичними рівнями певного типу атомів Квантовий пучок електромагнітної
енергії називається фотоном і дорівнює різниці енергій між двома рівнями в
одному атомі. Вживані нині атомні стандарти частоти використовують властивості
трьох елементів: водню Н (у стандартах частоти на водневих мазерах), рубідія Rb87 (у стандартах частоти на рубідієвих
газових осередках) і цезію Cs133 (в стандартах частоти на
цезієвих пучках).
У використовуваних на практиці атомних стандартах частоти
енергетичні рівні 1 і 2 визначаються взаємодією між магнітним моментом
неспареного електрона атома в основному стані і магнітним моментом атомного
ядра (надтонка взаємодія). Оскільки
така взаємодія слабка, воно призводить до малої ширини забороненої енергетичної
зони Е2 - Е1). При цьому частота резонансу V0 лежить в НВЧ діапазоні сантиметрових
хвиль, що і визначає ту, що практичну, що реалізовується атомних резонаторів.
На жаль, інший наслідок малої ширини забороненої зони Е2
- Е1, полягає в тому, що при тепловій рівновазі обидва рівні
заселені майже однаково. Цю рівновагу необхідно порушити, щоб зробити атомний
перехід помітним, наприклад, при вимірі поглинання або випромінювання порцій
енергії. Для досягнення цієї мети використовують два методи.
Перший метод заснований на тому, що атом, на різних енергетичних
рівнях, має протилежні магнітні моменти. Тому атоми двох енергетичних рівнів
можуть бути розділені пропусканням через неоднорідне магнітне поле. Цей метод
використовується в стандартах частоти на цезієвих пучках і водневих мазерах.
Другий метод заснований на оптичному накачуванні. Оптичне
випромінювання відповідної довжини хвилі використовується для збудження
(накачування) атомів і їх переходу, наприклад, з рівня Е2 на інший
рівень з більшою енергією E3. Спонтанний перехід з рівня Е3 на нижні рівні Е1
і Е2 відбувається дуже швидко, і в результаті заселеність одного з
двох рівнів Е1, і Е2 збільшується. Цей принцип
застосовується в рубідієвих стандартах частоти і в стандартах на цезієвому
пучку з оптичним накачуванням.
Таким чином, в основу принципу роботи атомних стандартів
частоти покладено захоплення частоти резонансу V0 при максимальній кількості атомних переходів між двома
квантовими енергетичними рівнями 1 і 2. Для управління частотою
використовується ланцюг зворотного зв'язку, який містить синтезатор від
кварцевого генератора, керованого напругою (ГУН) і датчик атомного резонатора.
.4 Активні та пасивні атомні стандарти частоти
В пасивних атомних стандартах на атоми діє сигнал надвисокої
частоти, який стимулює атомні переходи. Система зворотного зв’язку вирішує
завдання максимізації кількості атомних переходів, регулюючи частоту, що
синтезується від кварцового генератора, керованого напругою. Таким чином
резонанс досягається тоді, коли частота збудженого надвисокочастотного
коливання точно становить V0.
До пасивних стандартів частоти можна віднести і оптичні
генератори, що використовують атомні чи молекулярні переходи між основними і
збудженими станами. Джерелом світла для збудження переходів і підстройки часто
служить лазер.
В активних стандартах частоти є деякий пристрій, який
підтримує автоколивання. Електрична система здійснює фазову підстройку частоти
генераторів, керованих напругою на частоті генерованих коливань.
Якість пасивних атомних стандартів залежить від кварцових
генераторів. Короткочасна стабільність пасивних атомних стандартів значно
гірша, ніж кварцового генератора, що використовується для керування
надвисокочастотним генератором. Рубідієві стандарти частоти мають кращі
характеристики. їх стабільність перевищує стабільність кварцових осциляторів
для періодів часу, що більші, ніж 104с але гірша, ніж у стандартів на пучках.
Вони, як правило, менш чутливі до змін оточуючого середовища, ніж кварцові.
Упакований рубідієвий стандарт, як правило, менший ніж існуючі цезієві
стандарти.
Первинні стандарти частоти на пучках цезію базують на
принципі резонансу. Стандартні цезієві пучки займають вагоме місце в системах,
де точна частота повинна підтримуватися протягом довгого проміжку часу. Цезієві
стандарти відіграють важливу роль в системі GPS, і на бортах супутників.
2. Параметри сигналів на виходах пристроїв синхронізації
2.1 Точність
Під точністю пристроїв синхронізації розуміють максимальну
похибку часу або частоти, яку можна виміряти протягом заданого часу (або всього
терміну служби).
Коли говорять про точність частоти, розуміють максимальну
різницю ∆fmax, з якою ця частота може відрізнятися від свого номінального
значення fн:

Наприклад, максимально допустиме відхилення швидкості
первинного цифрового потоку El може відрізнятись від номінального
значення f0 = 2048 кбіт/с на величину ∆f = ±102 біт/с.
Для зручності порівняння точності сигналів з різними
номінальними значеннями частоти точність виражають переважно у відносному виді
- відношенням величини зсуву ∆f до номінального значення і т.д.

Відносні одиниці виражають у мільйонних частках - ppm
[мкГц/Гц], а для високоточних пристроїв в біліонних частках - ppb [наноГц/Гц].
На рис. 2.1 показана область допустимих значень частоти
сигналу El і деякі можливі значення, які можна спостерігати протягом
деякого часу. Зліва від осі ординат представлені позначення в абсолютних
одиницях, а праворуч - у відносних.
Слід розуміти, що точність частоти, в більшості випадків розуміють
не миттєве її значення, отримане при одноразовому вимірі, а також значення
частоти, отримане в серії вимірів або спостережувані протягом певного періоду
часу. Тому при розгляді вихідних даних при проектуванні пристроїв або розробці
схем зв’язку слід робити необхідне уточнення, для того щоб відокремити
складові, які характеризують стабільність і точність.
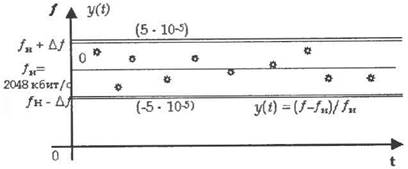
Рис. 2.1. Схематичне представлення простору допустимих значень частоти в
абсолютних і нормованих значеннях.
.2 Точність значущих моментів
Під точністю сигналів синхронізації (тактових сигнанів) розуміється степінь
відповідності надходження значущих моментів сигналу t * к очікуваним ідеальним моментам часу tк. По аналогії з (2.1) запишемо:
 (2.3)
(2.3)
 - номер поточного такту
- номер поточного такту
на множині цілих чисел  ;
;
 - моменти
- моменти  поступлення k-то значущого моменту в реальній тактовій
послідовності;
поступлення k-то значущого моменту в реальній тактовій
послідовності;
де  - моменти поступлення k-го значущого моменту в ідеальній тактовій послідовності;
- моменти поступлення k-го значущого моменту в ідеальній тактовій послідовності;
Т - одиничний тактовий інтервал;
t0
- початок відліку;
 - відхилення по часу значущих моментів реальних сигналів від
їх положення в ідеальній послідовності.
- відхилення по часу значущих моментів реальних сигналів від
їх положення в ідеальній послідовності.
Неточність по часу  , визначена як різниця між значущими моментами часу ідеальної
і реальної послідовностей в (2.3), за визначенням збігається з абсолютними
фазовими спотвореннями (джитером і вандером)
, визначена як різниця між значущими моментами часу ідеальної
і реальної послідовностей в (2.3), за визначенням збігається з абсолютними
фазовими спотвореннями (джитером і вандером)  . В літературі і в нормативних
документах ця величина відома як функція тимчасової помилки x(t), яку також позначають символом TE(t) (англійською - Time Error function) хоча мова йде про тимчасові
відхилення двох послідовностей в одиницях часу. Для пояснення сенсу введених
визначень наведено рис. 2.3.
. В літературі і в нормативних
документах ця величина відома як функція тимчасової помилки x(t), яку також позначають символом TE(t) (англійською - Time Error function) хоча мова йде про тимчасові
відхилення двох послідовностей в одиницях часу. Для пояснення сенсу введених
визначень наведено рис. 2.3.
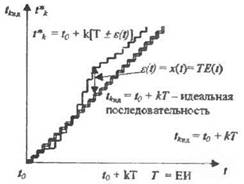
Рис. 2.3 До пояснення поняття точності сигналу по часу -
функції тимчасової помилки (тимчасових відхилень)
Ідеальна, послідовність зображена у вигляді ступінчастої
бісектриси, так як її фаза росте прямо пропорційно часу, а реальна
послідовність - у вигляді нерівномірної ступінчастої функції відхилення "з
помилками". Одне поточне значення різниці між ідеальною і реальною
послідовностями позначено на рис. 2.3 як  .Оскільки в літературі використовують
позначення
.Оскільки в літературі використовують
позначення  і
і  , то в подальшому будемо використовувати тільки їх.
, то в подальшому будемо використовувати тільки їх.
Однак у визначеннях  , і є різниця. Перша - в тому, що до х(0
відносять тільки випадкові відхилення, а до ТЕ(ґ) відносять і регулярні зміни.
Друга відміна більш істотніша. В практичних вимірах х(ґ) і ТЕ(Ь) використовують
рівномірні інтервали часу взяття відліків - Т0, по своєму фізичному сенсі
еквівалентні періоду дискретизації хк = х(і0 + кТ0), а для виміру є(ґ)
використовуються розрахунки ік = ґ0 + кТ , де Т означає тривалість одиничного
тактового інтервалу - 01. Інтервал часу взяття відліків Т0 може бути рівний ОІ, більшим і кратним ОТ,
або представляти будь-яку усереднену величину.
, і є різниця. Перша - в тому, що до х(0
відносять тільки випадкові відхилення, а до ТЕ(ґ) відносять і регулярні зміни.
Друга відміна більш істотніша. В практичних вимірах х(ґ) і ТЕ(Ь) використовують
рівномірні інтервали часу взяття відліків - Т0, по своєму фізичному сенсі
еквівалентні періоду дискретизації хк = х(і0 + кТ0), а для виміру є(ґ)
використовуються розрахунки ік = ґ0 + кТ , де Т означає тривалість одиничного
тактового інтервалу - 01. Інтервал часу взяття відліків Т0 може бути рівний ОІ, більшим і кратним ОТ,
або представляти будь-яку усереднену величину.
Як правило, при дослідженні повільних процесів типу дрейфу
частоти або фази сигналу з максимальною частотою зміни Рй і відповідно з
періодом Та виконується умова:
 (2.4)
(2.4)
Іншими словами, частота взяття відліків при спостереженні
процесу набагато більше максимальної частоти зміни сигналу.
.3 Стабільнісь
Під стабільністю пристрою синхронізації, генератора тактового
сигналу, розуміється його здатність формувати тактові інтервали (ОІ) часу (або
частоту) з постійним значенням (це значення може відрізнятися від номінального,
але повинно залишатися постійним з плином часу). На практиці стабільність розцінюють,
порівнюючи досліджуваний сигнал з частотою або тактами (тимчасовими
інтервалами) сигналу зразкового джерела.
Параметри стабільності залежать від часу відповідно
виражаються функціями відхилення нормованої частоти у(і) або тимчасової помилки
х($ в часі і.
Стабільність пристрою синхронізації оцінюють, вимірюючи
випадкові і детерміновані відхилення миттєвої частоти або помилок часового
інтервалу від їхніх номінальних значень на заданому інтервалі спостереження.
Для малих інтервалів спотереження широко використовують
термін короткочасна стабільність, в іншому випадку говорять про довготривалу
стабільність. Наприклад, в області метрології часу Інтервали, які перевищують
добу, прийнято вважати довготривалими, а в електрозв’язку інтервали
спостереження більші ніж 100 с вже попадають
під категорію довготривалих. До довготривалих відносять І
виміри протягом 10 с, і добові і більш тривалі.
На рис. 2.4а показані приклади сигналів: один (суцільна
лінія) з хорошою довготривалою і поганою короткотривалою стабільністю частоти,
а другий (пунктир) з хорошою короткотривалою стабільністю і поганою
довготривалою стабільністю частоти, причому обидва сигнали знаходяться в
допустимих межах. На рис. 2.4б показано приклад нестабільності з
короткотривалою і довготривалою складовими.


Рис. 2.4 Приклади нестабільності в нормованому просторі
допустимих відхилень частоти
Кажучи про характеристики стабільності пристроїв їй сигналів
синхронізації, слід назвати ще один приклад стабільності; який визначений як
середнє значення квадратів різниць двох сусідніх відліків поточних значень
частоти - дисперсія Аллана:
оу(т) = М[(уй+1 - ук)2/2 = М[(Ду*)2]/2(2.5)
де М( . ) - символ (оператор) математичного очікування - середньо
арифметичного на інтервалі виміру*
Ау - відхилення відносної частоти, яке на практиці обчислюють
як різницю між двома сусідніми відліками: Ау = ук+1 - ук;- інтервал виміру;
деколи говорять про інтервал усереднення.
Для ілюстрації визначення (2.5) на рис. 2.5 наведено графік
дисперсії Аллана по результатам виміру кварцового генератора. Дисперсія
вимірялась усередненням на інтервалах часу т від 10 мс до 200сек.
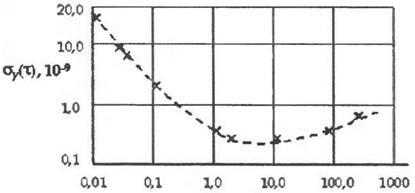
Рис. 2.5 Графік  кварцевого генератора у вигляді
функції від часу усереднення
кварцевого генератора у вигляді
функції від часу усереднення 
.4 Дисперсія Аллана по часу
Відхилення частоти ∆f контролюючого генератора виміряється
за допомогою електронного частотоміра з внутрішнім опорним генератором,
Частотомір виміряє тривалість n періодів вхідного сигналу. Тривалість інтервалу виміру становить:т =
п//ОПОр 0ГОПор ** частота опорного генератора). Отже, частотомір дає усереднене за інтервалом т значення
частоти, яке позначимо як /г. Щоб спростити питання, припустимо, що
"мертвий" час між двома вимірами набагато менший в порівнянні з
інтервалом вимірювання Щ Таким чином, можна вважати, що послідовність відліків
частоти Iх відбувається в дискретні моменти часу ік, при чому ґк -==і. Далі по
(2.2): обчислюються нормовані значення серії вимірів ук т. Так як величини ук т
визначені між моментами часу Ьк і ^+1, то, можна використати вираз 2.5 у
вигляді:
у(0 = (ЬсЮ/сИ,(2.6)
і, замінюючи похідну кінцевими приростами: dx(t) ^ хк^± - хк,
Аґ = т, отримаємо спі ввідношення між виміряним значенням нестабільності
частоти ук т і нестабільністю часу хк:
Використовуючи вираз (2.7) і визначення сгу2(т) (2.5),
отримаємо вираз для дисперсії Аллана через
виміряні відхилення:
0-у2(т) = М[(^+2 :- 2хц+1 + хк)2]/2х2(2.8а)
Останній вираз можна переписати у явному виді функції від т:
<ту2(т)
== М{[х( ^ + 2т) - 2х( % + т) + х{ **)]2}/2т2(2.86)
У практичних додатках використовується безліч прикладів
отримання оцінок дисперсії Аллана.
Таблиця 2.1 Приклад розрахунку дисперсії Аллана
|
№
|

|

|

|
Примітка
|
|
1
|
2
|
3
|
4
|
5
|
|
1
|
5000023.90
|
0,000478
|
0
|
|
|
2
|
5000024,00
|
0,00048
|
4Е-12
|
|
|
3
|
5000024,20
|
0,000484
|
1.6Е-11
|
|
|
4
|
5000024,00
|
0,00048
|
1.6Е-11
|
|
|
5
|
5000024,20
|
0.000484
|
1.6Е-11
|
|
|
6
|
5000024,00
|
0.00048
|
1.6Е-11
|
|
|
7
|
5000024,40
|
0.000488
|
6.4Е-11
|
|
|
8
|
5000024.40
|
0,000488
|
0
|
|
|
9
|
5000024,30
|
0,000486
|
4Е-12
|
|
|
10
|
5000024,20
|
0,000484
|
4Е-12
|
|
|
11
|
5000024,30
|
0,000486
|
4Е-12
|
|
|
12
|
5000024,40
|
0.000488
|
4Е-12
|
|
|
13
|
5000024,50
|
0,00049
|
4Е-12
|
|
|
14
|
5000024,40
|
4Е-12
|
|
|
15
|
5000024,50
|
0,00049
|
4Е-12
|
|
|
16
|
5000024.40
|
0,000488
|
4Е-12
|
|
|
17
|
5000024,60
|
0,000492
|
1.6Е-11
|
|
|
18
|
5000024,70
|
0,000494
|
4Е-12
|
|
|
М
|
5000024,32
|
0,000486421
|
9,68421*10-12
|
Среднее
|
|

|
0,0554
|
2,08753*10-12
|
1,97584*10-22
|
Дисперсия
|
|

|
0,235376
|
4,56895*10-6
|
1,40565*10-11
|
Стандарт
|
|
|
|
4,84211-10*12
|
Дисперсия Аллана
|
У четвертому стовпці наведені квадрати поточних різниць
відносних частот. Внизу таблиці наведені середні значення М абсолютних значень
нормованих відхилень частоти і квадратів різниць (стовпець 4). Дисперсії <т2
і середньоквадратичного відхилення а з цих величин наведені нижче. В останньому
рядку 4-го стовпця наведена дисперсія Аллана (2.5), рівна половині середнього
значення квадратів різниці збільшень частоти.
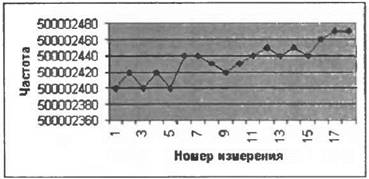
Рис.2.6 Поточне значення частоти в прикладі розрахунку
дисперсії Аллана
3. Нормовані параметри стиків синхронізації
3.1 Максимальна помилка часового інтервалу
Для нормування стиків синхронізації використовується поняття
максимальної помилки часового інтервалу МПЧІ (МТІЕ - maximum time interval
error). МПЧЗ був введений для врахування вимог до ємності буфера (еластичної
пам’яті) в системах синхронізації. Буфер згладжує відхилення частот запису і
зчитування. Тому забезпечення норм по МПЧІ це гарантія, що поріг переповнення
буфера не буде перевищено.
Для врахування статистики відхилень частоти синхронізації
використовують поняття девіація часового інтервалу ах(т) = ДЧІ(т).
Визначення МПЧІ(Т, т) базується на понятті помилки часового
інтервалу (ПЧІ) (ТІЕ(т) - Time Interval Error), що визначається, як різниця в
часі поступлення значущих моментів опорного та досліджуваного сигналів в час т
від початку вимірювання t0:
ПЧІ(г) = TE(t0+ є) • TE(t 0) = x(t 0+т) - x(t 0),
Де TE(t) - функція часової помилки.
На рис. 3.1 показаний хід функції часового відхилення x(t)
=TE(t) і сумарна помилка часового інтервалу ПЧІ(т) за час т і максимальний
розмах відхилень часового інтервалу МПЧІ(т) за час т.
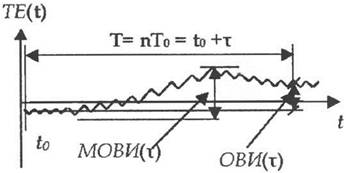
Рис.3.1 Часове відхилення - помилка ПЧІ(т) і максимальне
відхилнення часовогого інтервалу МПЧІ(т) як функції т £
Помилка часового інтервалу МПЧІ(Т, т) визначається, як
максимальний розмах часових відхилень х(1:) (ТЕф) на всіх можливих інтервалах
спостереження т протягом всього періоду зміни Т.
МПЧІ(пТ0) г тах [тах(х,.) -тіпСх,)]5 п - 1,2,...N-1(3.1)
Де ХІ - величина часової помилки і-го відліку: хі ^ х(іТо),.
н - кількість відліків, взятих за інтервал спостереження т;-
кількість взятих відліків за весь період вимірювань Т(див рис.3.1) МПЧІ(Т, т) -
функція інтервалів т і всього періоду вимірювання Т10.
На рис 3.2 продемонстрований спосіб визначення МПЧІ(Т, т) за
весь період вимірювання Т і два значення інтервалу т/ і Ш на цьому періоді з
різними розмахами х(1). З рисунка видно, що найбільший максимум розмаху
досягається в інтервалі т є T.
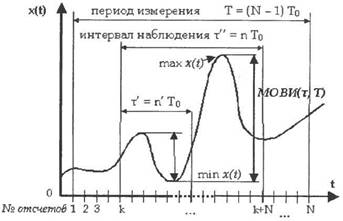
Рис.3.2 Визначення параметра МПЧІ
Параметр МПЧІ широко використовується на практиці при
тестуванні пристроїв синхронізації. Метод виміру МПЧІ реалізований в багатьох
сучасних мережевих аналізаторах. На рис. 3.3 приведені шаблони допустимих
значень МПЧІ(Т, т) в пристроях синхронізації обладнання SDH і PDH.
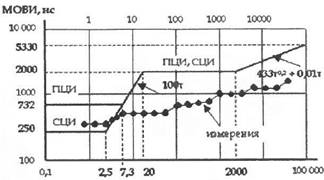
Рис. 3.3 приклад маски допустимих значень обробки результатів
вимірювань МПЧІ для пристроїв синхронізації обладнання PDH, SDH.
Для визначення МПЧІ потрібно спочатку провести вимірювання
ПЧІ протягом певного проміжку часу і побудувати криву, з якої легко визначити
МПШ(рис. 3.4).
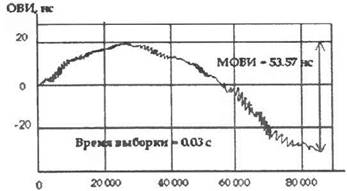
Рис.3.4 приклад вимірювання ПЧІ пристрою синхронізації,
проведеного протягом доби.
В реальних системах ПЧІ не має перевищувати певного значення
в певний момент часу. Треба постійно проводити моніторинг відхилення часового
інтервалу і порівнювати його допустимим відхиленням.
При перевищенні допустимого значення в системах зростає
ймовірність помилок. Приклад результатів добового МПЧІ наведено на рис. 3.5
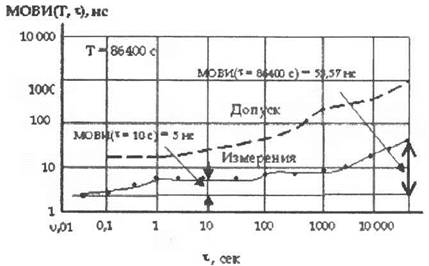
Рис. 3.5 Приклад результатів добового МПЧІ
3.2 Девіація часового інтервалу ДЧІ(т) і стандарт відхилення
часового інтервалу ПВІ
Для врахування статистики відхилення частоти синхронізації
використовують девіацію часового інтервалу ох(т) = ДЧІ(т). За визначенням
ДЧІ(т) становить
=+ *„,)]*/6и2>шДО=И.Ї2 п. (З#;
де М означає математичне сподівання ансамблю N рівномірних
відліків {Xj=х(іт), і = 1,2,.. .Д4} функція часових відхилень x(t), % - період
дискретизації, і т = п т0 - інтервали спостереження. Середньоквадратичне
значення ПЧІ - стандарт визначають як
ПЧГ(г) = {M[x(t+ т)ЬкЩ2УП
4. Дослідження поведінки параметрів генератора по часу
Припустимо, що частота встановлена з початковим зсувом Щ| від
номінального значення. В нормованому вигляді це відповідає значенню у0 нарис.
4.1.
Подальше зміщення (дрейф) частоти, обумовлено складними
процесами, які виникають у досліджуваній апаратурі, і може бути описано різними
законами. В загальному вигляді використовують представлення у вигляді степенних
рядів, однак у практичних додатках часто обмежуються першим членом ряду, і
представляють зміну частоти лінійною функцією часу. Для нормованої частоти у(і)
рівняння "руху" частоти при початковому зсуві у0 і швидкості дрейфа И
приймає вигляд (рис. 4.1):
У(1) - Уо + ОЬ(4,1)
де: у о - початковий зсув частоти;- швидкість дрейфу
відносної частоти.
Величина дрейфу D характеризує довготривалу стабільність
пристроїв і сигналів синхронізації і являється одним основних нормованих
параметрів.
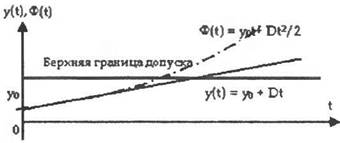
Рис. 4.1 Графічний приклад лінійного дрейфу частоти
Провівши вимірювання частоти протягом довгого періоду часу
можна експериментально визначити величину дрейфу
На рис. 4.2 показана довготривала стабільність кварцового генератора
КГ89-ЕС-4 на 4,096 МГц. Частота вимірювалась протягом 22 днів (вісь абсцис).
Відносне значення частоти в 109 відкладене на осі ординат. Прямою лінією
показана лінійна апроксимація результатів вимірювання. Можна бачити, що лінійне
рівняння дає дуже хороше приближения довготривалого дрейфу частоти.
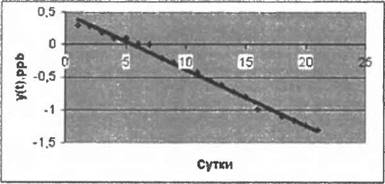
Рис. 4.2 Стабільність кварцового генератора, виміряна
протягом 22 днів
.2 Зв'язок між фазою і частотою сигналу при лінійному дрейфі
частоти
Для встановлення зв’язку між зміною нормованої частоти у (і)
і помилки тимчасового інтервалу x(t) можна записати у вигляді:
x(t) == Ф(і)/2тг/ = Jj y(t)dt(4.2)
Підставляючи в рівняння (4,2) і інтегруючи, получимо вираз
для повної фази сигналу:
x(t)~ y0t + Dt2/2 + const(4.3)
Таким чином, видно, що при лінійному дрейфі частоти повна
фаза зростає пропорційно квадрату часового інтервалу.
На рис. 4.3 наведені графіки залежності повної фази сигналу
від часу. При відсутності дрейфу частоти повна фаза зростає пропорційно часу
(суцільна лінія). Коли виникає дрейф, частота зменшується (пунктирна лінія) або
збільшується (штрих-пунктирна лінія), залежність повної фази від часу набуває
нелінійний характер (пунктирні лінії).
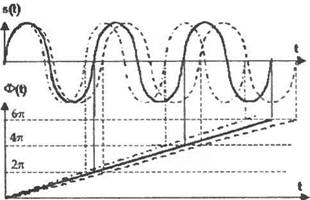
Рис. 4.3 Ілюстрація впливу дрейфу частоти на повну фазу
сигналу
.3 Поведінка параметрів генераторів у часі
На рис. 4.4 показана залежність відносної нестабільності
частоти від часу спостереження для генераторів різних систем: кварцевого - Qz,
цезієвого - Cs і рубідієвого - Rb генераторів, генератора на основі водневого
мазера - НМ, і керованих від глобальної навігаційної супутникової системи GPS.
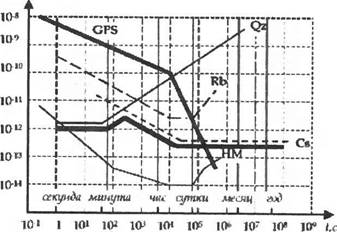
Рис.4.4 Залежність відносної нестабільності частоти від
нагляду для різних систем
Можна бачити, що пристрої синхронізації мають різні
короткотривалу і довготривалу стабільності. Для пристроїв з хорошою
довготривалою стабільністю характерний тривалий інтервал часу входження "в
режим" - від декількох годин до доби. Для отримання хороших експлуатаційних
характеристик часто об’єднають пристрої з хорошою довготривалою і
короткотривалою стабільністю. На рис. 4.4 подвійною лінією з підкресленням
показано результат часто використовуваного об’єднання кварцового генератора І '
атомного стандарти на цезієвому пучку. Об’єднанюючи різні системи, можна
отримати різні по вартості варіанти технічних рішень генераторного обладнання з
необхідними характеристиками.
Технічні вимоги до пристроїв синхронізації вичислюються
їхніми ієрархічним рівнем. В таблиці 4.1 наведена ієрархія пристроїв
синхронізації по класифікації МСЄ-Е, Для кожного рівня ієрархії наведені
стандартні значення основних параметрів: точності в відносних одиницях у і
довготривалій стабільності - добового дрейфу частоти D - швидкості зміни частоти.
Таблиця 2 Технічні вимоги до пристроїв синхронізації
|
№ рівня
|
Позначення генератора
|
Рекомендація МСЄ-Т
|
Параметри пристроїв синхронізації
|
|
|
|
Точність у
|
Стабільність (дрейф И)
|
|
1
|
ПЕГ
|
0.811
|
1*10"'1
|
0
|
|
2
|
ВЗГ
|
0,812
|
1*КГ*
|
3,0*1(Г8>
|
|
3
|
ГМЕ
|
0.813
|
1*10-0
|
5*10^
|
Слід відмітити, що точність і стабільність реальних пристроїв
синхронізації часто значно перевищують встановлені норми, наприклад типове
значення точності частоти у для цезієвого джерела становить:
 , а для джерела на основі водневого мазера:
, а для джерела на основі водневого мазера: 
5. Дослідження впливу проковзування на якість передачі інформації
5.1 Проковзування при передачі різних видів інформації
Вплив проковзування для різних видів переданої інформації
(видів послуг) і залежить від степені надлишковості повідомлень.
Ефект проковзування у мовному сигналі, перетвореному в
цифрову форму, виявляється зрідка чутних клацаннях. Через високу надлишковість
мовних повідомлень вплив проковзування невеликий. Одиничне проковзування
створює лише один помилковий імпульс у декодованому аналоговому сигналі, який
можна і не почути. Чутне клацання в ЦСП з ІКМ виникає тільки 1 раз приблизно з
20-25 випадків. Допустиме число проковзувань при передачі мовного сигналу .
.
Сигнали передачі даних володіють значно меншою надлишковістю,
ніж мовний. Тому помилки передачі виявляються і усуваються пристроями захисту
від помилок апаратури передачі даних. Одне проковзування створює тільки
затримку передачі даних. Тому до передачі даних зі швидкістю низькою швидкістю
не пред’являють серйозних вимог.
При передачі сигналів керування і взаємодій станцій,
наприклад, між різними АТС або абонентом і АТС, проковзуваний можуть спричинити
помилки і, як наслідок, неправильне встановлення з’єднання або передчасне
роз’єднання.
В таблиці 3 наведені дані про вплив проковзувань на різні
види повідомлень, переданих по цифровій мережі. Залежно від методу кодування
одне проковзування при передачі зображень викликає зрушення рядка. При цьому
окреме проковзування може спотворити всі зображення і це спричинить потребу
повторної передачі.
Незалежно від виду послуг зв’язку одиничне проковзування, як
правило, непомітне. Якщо проковзування повторяється регулярно або пакетами,
тільки тоді користувач помічає зниження якості передачі.
Кожному виду переданої інформації відповідає допустиме число
проковзувань. Тому при проектуванні слід встановити максимально допустиме число
проковзувань для синхронізації мережі.
Таблиця 3 Вплив проковзувань на якість передачі
|
Вид передачі
|
Вплив проковзування
|
|
Мова, нестиснута
|
Тільки 4-5% проковзування призводить до чутних
клацань.
|
|
Мова, стиснута
|
Проковзування може призводити до чутних 1 клацань
|
|
Канал синхронізації
|
Можливі помилки або розриви з’єднань
|
|
Дані в каналі ТЧ- модем
|
Проковзування може призвести до втрати даних на
декілька секунд.
|
Проковзування може стерти декілька рядків
|
|
Зображення, стиснуте
|
Втрата декількох рядків. Численні проковзування
можуть призвести до блокування кадрів на декілька секунд
|
|
Дані, зашифровані
|
Проковзування знижують пропускну здатність, можлива
втрата ключа, що знижує стійкість системи
|
5.2 Допустима величина проковзування
Допустиме число проковзування у національній телефонній
мережі залежить від видів послуг, при цьому слід враховувати послуга, які
плануюються на майбутнє. Для мережі загального користування; максимально
допустиме число проковзування визначається по найчутливішому до проковзування
виду послуг зв'язку.
Наприклад, для телефонної передачі прийнятний інтервал часу
між сусідніми клацаннями можна прийняти рівним тривалості одної телефонної
розмови, приблизно 5 хв, коли середнє число проковзування за одну годину (для
12 п'тихвилинних інтервалів) становить: 1Упр-доп; х 12 Ц 25 х 12"= 300.
Рекомендація Є.822 для якості передачі категорії (а) допускає
не більше 5 проковзувань в добу протягом більш як 98,9% часу нагляду, рівного
або перевищуючого один рік. Для категорії (Ь) допускається більше 5
проковзувань на добу.
Для міжнародних цифрових мереж, працюючих у плезіохронному
режимі, для каналу ЕО (64 кбіт/) в кожній комутаційній станції допускається
максимально 1 просковзування за 72 дні.
Мінімальна точність частоти, відносно скоординованого
всесвітнього часу (ІЛГС) для первинних пристроїв синхронізації становить Ю-11.
В таблиці 4 у другому стовпці наведено допустиме число проковзування при
заданій відносній точності у0.
Максимальна різниця частот між двома будь-якими первинними
пристроями синхронізацій' рівна 2у0 = 2 X 10-11, а максимальна частота
проковзування між двома мережами, синхронізованими цими генераторами, рівна 1
протягом 2,4 місяці при частоті повторення циклів 8000/сек. В останньому
стовпці таблиці 4 наведено розрахункове значення кількості проковзування між
двома мережами, у кожній з яких підтримується вказання в першому стовпці
точність.
Таблиця 4 Частота виникнення проковзування при частоті циклів 8 кГц
|
У0
|
На одній комутаційній станції
|
Між двома мережами
|
|
10-11
|
1 проковзування в 4,8 місяці
|
1 проковзування в 2,4 місяці
|
|
10-10
|
1 проковзування за 14,5 дні
|
1 проковзування за 7,25 дні
|
|
10-9
|
1 проковзування за 1,45 дні
|
1 проковзування за 0,725 дні
|
|
10-8
|
6,9 проковзування в день
|
13,8 проковзування в день
|
|
10-7
|
2,9 проковзування в годину
|
5,4 проковзування в годину
|
|
10-6
|
28,8 проковзування в годину
|
56,8 проковзування в годину
|
|
10-5
|
4,8 проковзування в хвилину
|
9,6 проковзування в хвилину
|
У з’єднаннях, в яких використовуються первинні пристрої
синхронізації з довготривалою точністю 10"11 при наявності більше 2 вузлів
(фрагментів мережі), синхронізуються від різних пристроїв з якістю, номінальна
частота проковзування зростає і визначається із виразу:
проковзування ~ 72/(п-1), днів(5.1)
де п - кількість первинних задаючих генераторів, які беруть
участь у з’єднанні або число регіонів, які "ведуть" ці генератори.
Іншими словами, (п-1) рівне кількості ділянок між генераторами.
Міркування, подібні використаним при виведенні (5.1), можна
застосовувати для обчислень при будь-якій заданій точності частот у.
При використанні примусової синхронізації з одним ведучим
генератором на мережі із декількох ведених станцій теоретично число
проковзування рівне нулю. Але на практиці слід враховувати несправності,
зумовлені пошкодженями ведучого пристрою синхронізації або пошкодження зв’язку
між станціями. В цих випадках при втраті сигналу від ведучого генератора ведені
пристрої переходять в плезіохронний режим. Тактові частоти можуть значно
відрізнятися один від одного, і число проковзування зростає. Тому необхідно
вибрати допустиме число проковзування і сформулювати вимоги до частоти збоїв у синхронізації.
6. Побудова мережі синхронізації України з урахуванням
вимог МСЕ-Т
6.1 Еталонна модель мережі синхронізації
Мережа синхронізації України побудована згідно еталонної
моделі мережі синхронізації (G.811- G.813 МСЕ-Т).
Суть еталонної моделі - в мережі синхронізації є один або
декілька (для надійності системи) первинних еталонних генераторів (ПЕГ) з
довготривалою нестабільністю не нижчою, ніж 10-11,
вторинних (ведених) задаючих генераторів (ВЗГ) з точністю не нижчою ніж 10-8
і короткотерміновою нестабільністю 10-9...10-11 (до 1
секунди) і генераторів мережевих елементів (ГМЕ) з точністю 10-6. В
такій мережі синхронізації всі генератори підстроюють свої такти до ПЕГ (Рис.
6.1).
Ієрархія мережі синхронізації крім вертикальних з’єднань має
ще й горизонтальні з’єнадння, що забезпечують надійність мережі.
6.2 Принцип побудови мережі синхронізації України
Для забезпечення високої надійності мережа синхронізації
України побудована на основі "трикутника синхронізації". Є три
первинні еталонні генератори в таких містах України:
· м. Обухів, Київська обл.
· м. Немирів, Вінницька обл,
· м. Олександрія, Кіровоградська обл.
В разі виходу з ладу одного, або навіть двох із цих
генераторів мережа не перестане працювати.
Під час побудови мережі синхронізації України виникли
наступні проблемні питання:
як раціонально використовувати існуюче обладнання тактової
синхронізації;
яким чином забезпечити резервування маршрутів розподілу
синхросигналу і створити систему управління мережею синхронізації;
як забезпечити продаж синхросигналу різним споживачам
гарантованої якості, забезпечивши його контроль і вимірювання;
як гарантувати якісне проектування і реалізацію СТС в цілому;
Простеживши за хронологією публікацій, у яких послідовно
пророблялися принципи побудови мережі синхронізації для первинної мережі
України, то цей процес майже збігся за часом з аналогічними напрацюваннями в
інших країнах і відбувався під впливом перегляду основних положень нормативної
бази синхронізації мереж МСЕ-Т. Положення Концепції і Стандарту підприємства
практично збігаються з цими напрацюваннями. Зокрема, для первинної мережі
синхронізації України прийнята концепція мережі примусової синхронізації з
розподіленим PRC, що представлена на рис. 4, а на рис. 5 приведений приклад
варіанту реалізації СТС на цифровій мережі України. На рис. 5 перший рівень
ієрархії побудови мережі синхронізації реалізується за допомогою ПЕГ, другий -
ВЗГ, третій - ГСЭ в мультиплексорах СЦІ.
Без використання сигналів супутникових радіонавігаційних
систем, оперуючи обмеженими засобами, неможливо забезпечити необхідну якість
синхронізації мережі такого масштабу, як первинна мережа синхронізації України.
Архітектурою СТС повинна гарантуватися незалежність її
працездатності від зовнішніх впливів, у тому числі і від таких малоймовірних,
як вихід (або вивід) з ладу супутникових радіонавігаційних систем.
Структура мережі синхронізації України яка реалізується (див.
рис. 4) задовольняє перерахованим умовам: у будь-якому вузлі мережі по першому
пріоритету підключається стик синхронізації місцевого PRC. У той же час у
випадку аварії в будь-якому вузлі мережі по другому пріоритеті доступний сигнал
синхронізації від супутника GPS. Відзначимо, що основою PRC повинен бути
логічно єдиний пристрій, що складається з трьох функціонально рівноправних
частин, але територіально рознесених навколо географічного центру країни. Спочатку мережа синхронізації України
була побудована на основі ТЕР "Створення системи синхронізації цифрової
мережі зв'язку" у 1997 р. Структурна схема такої мережі приведена на рис.
6. В даний час передбачається на мережі синхронізації України реалізувати схему
СТС приведену на рис. 4. Стверджувати, що проблем синхронізації первинної мережі України не існує,
не приходиться - дотепер вирішувалися лише приватні задачі синхронізації її
фрагментів, часто за допомогою різних закордонних компаній, що вигравали
тендери на окремі проекти. Тільки до кінця 2002 р. була усвідомлена узагальнена
постановка проблеми і складність її вирішення відповідно до міжнародних
стандартів МСЕ-Т. Цьому сприяли цілком об'єктивні причини:
будівництво і введення в експлуатацію волоконно-оптичгних
ліній "Таврія", "Дністер", "Карпати",
"Полісся", "Десна", "Вуглик" і "Січ"
знаменують собою перетворення первинної мережі в мережу де-факто; якщо
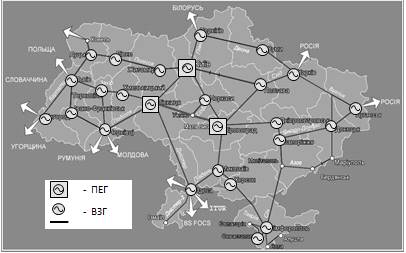
Рисунок 5. Мережа синхронізації України
Дотепер вона була простим набором незамкнутих ліній
("Південь", "Північ", "Захід", Схід",
"Дніпро-Донбас", "Карпати"), то зараз стає системою, що
складається, щонайменше з п'яти замкнутих кілець, синхронізація яких вимагає
значно більшої уваги в процесі проектування й експлуатації;
на первинній мережі склався парк обладнання синхронізації,
котре повинно використовуватися значно ефективніше, ніж дотепер;
первинна мережа повинна забезпечувати послуги по наданню
стиків синхронізації регіональним і іншим операторам, але не може цього робити
через відсутність методик атестації стиків і незалежних метрологічних служб,
здатних реалізувати ці методики;
відсутність контролю параметрів якості СТС і системи
керування мережею.
В даний час система тактової синхронізації мережі України має
безліч проблем побудови, розвитку й удосконалювання. До таких проблем
відноситься проблема ефективного контролю мережі. Рішення її тісно пов’язано з
розробкою і придбанням необхідних засобів контролю і вимірювання характеристик
і параметрів якості синхросигналів СТС, що забезпечують аудит і моніторинг
мережі. Вирішення цих та інших питань, що відносяться до метрологічного забезпечення
і технічної експлуатації мережі СТС, допоможе забезпечити надійну передачу
інформації з потрібною якістю в мережі.
Висновок
Метою даної курсової роботи є побудова мережі синхронізації
України. В роботі було розглянуто основні особливості побудови мереж
синхронізації, а також вимоги стандарту МСЕ-Т.
В результаті виконаної роботи було побудовано мережу
синхронізації з трьома основними центрами в наступних точках:
· м. Обухів, Київська обл.
· м. Немирів, Вінницька обл,
· м. Олександрія, Кіровоградська обл.
Такий вибір кількості і географічного розташування центрів
синхронізації забезпечує достатнє резервування і якість синхронізаційних
сигналів.
Список рекомендованої літератури
1.Харкевич А. А Основы радиотехники. - Гос. изд-во
технико-теоретической литературы. - 14,1962. - 559 с..
.Харкевич А.А. Автоколебания. - Гос. изд-во
технико-теоретической литературы. - М.,1952. - 170 с.
.Ланда П.С. Автоколебания в системах с конечным числом
степеней свободы. - М : Наука, 1980.-360 с.
.Бишоп Р. Колебания: Пер. с англ. / Под ред.
Я.Г.Пановко. - 2-е изд.,перераб. - М.: Наука, 1979. - 160 с.
.Цифровая связь: Справочник/ И.П. Панфилов, В К.
Стеклов, Н.Л Бирюков и др.; Под ред д- ра техн Наук В.К Стеклова.-К.: Технша,
1992 230 с.
.Selection and use of precise frequency and time
systems: Handbook ITU Radiocommunication Bureau, 1997 (Справочник по выбору и
использованию систем точной частоты и точного времени / МСЭ-Р, 1997 - 191 с.)
.ITU-TRecommendation G. 810 (08/96) Definitions and
terminology for synchronization networks
.ITU-TRecommendation G.811 (09/97) Timing
characteristics of prima-reference clocks.
.Bregni S Synchronization of Digital Telecommunication
Networks - John Wiley & Sons, ltd- 2002,395 pp.
10.ITU-T Recommendation G.812 (06/ 98) Timing requirements of
slave clocks suitable for use as node clocks in synchronization networks.
ETSI EG 201 793 VI. 1.1 (2000-10) Transmission and
Multiplexing (TM); Synchronization network engineering