Вимірювальні перетворювачі
1. Загальні відомості. Класифікація
Керувачі (КП) - пристрої, призначені для
порівняння інформації, що надходить від задавачів (З) з інформацією про стан
привода, що передає по ланцюгу зворотного зв’язку (ЗЗ).
Технічне виконання К залежить від виду З. Якщо
вихідний вал СП слідкує за зміною напруги, що надходить з аналогової ЕОМ,
програмного, оптичного або радіолокаційного пристрою, то в якості К
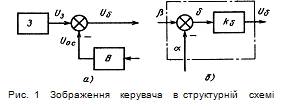
застосовують сумуючий каскад на вході підсилювача. На структурній схемі такий К
зображують так, як показано на рис. 1, а. В якості перетворювача В в ланцюгу ЗЗ
в позиційному СП використовують потенціометр, у швидкісному - тахогенератор
(див. Рис. 1).
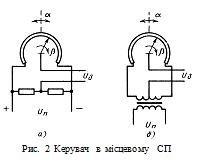
У місцевому СП в якості К застосовують один
датчик (індукційний, потенціометричний), корпус якого пов’язаний з задаючим
валом, а ротор або відповідно бігунець (повзун) - з валом виконавчого двигуна.
Схема підключення потенціометра постійного струму зображена на рис. 2, а. Для
використання потенціометра на змінному струмі (рис. 2, б) можна застосувати
трансформатор з середньою точкою.
Якщо в якості З служить вхідний сигнал,
розташований на значній відстані від виконавчого валу, то К будують на основі
дистанційної потенціометричної або індукційної передачі, що складається з
ідентичних датчиків, електрично ввімкнених по мостовій або трансформаторній
вимірювальній схемі. На структурній схемі такий К зображають так, як показано
на рис. 1, б. Такі пристрої частіше називають вимірювачами розузгодження (ВР).
Як видно з рис. 1, б, ВР порівнює кути повороту і перетворює одержану різницю в
електричний сигнал.
Основними характеристиками і параметрами ВР є
наступні:
статична характеристика  , що
представляє собою залежність вихідного сигналу від помилки розузгодження;
, що
представляє собою залежність вихідного сигналу від помилки розузгодження;
коефіцієнт перетворення (чутливість)
 ;
;
похибки вимірювального пристрою;
потужність вихідного сигналу.
До основних вимог, що пред’являються
до ВР, відносяться:
висока точність вимірювання та
перетворення кута розузгодження;
лінійність і велика крутизна
статичної характеристики;
мала потужність споживання
електричної енергії;
безінертність;
надійність;
мінімальні розміри і маса.
Особливо жорсткі вимоги пред’являють до чутливості і точності вимірювання,
оскільки точність СП не може бути вище точності пристрою,
що вимірює і перетворює сигнал розузгодження.
Основним показником точності вимірювання є похибка вимірювання,
тобто відхилення результату вимірювання від істинного значення величини,
що вимірюється.
Похибки вимірювання поділяють по способу виразу на абсолютні і відносні,
а за джерелом виникнення
- на інструментальні,
допущені при виготовленні власне вимірювачів,
і методичні,
що виникають внаслідок недосконалості вимірювальної схеми або неузгодження опорів.
. Механічний диференціал
В СП з механічним зворотнім зв’язком в якості ПУ знаходять застосування механічні диференціали
(МД).
По
конструкції
МД поділяють на конічний шестеренний
(рис. 3, а) і гвинтовий (рис. 3, б).
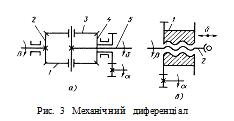
Як видно на рис.
3, а,
конічний МД складається з двох незалежних приводних конічних зубчастих коліс
2 і
4, зв’язаних відповідно з задавального та виконавчою осями СП,
і двох сателітів
1, 3, жорстко з’єднаних хрестовиною,
вісь
5 котрої вільно проходить через втулку колеса
4 і є вихідною віссю пристрою.
При
обертанні коліс 2 і 4 в протилежні боки з однаковими швидкостями сателіти і
зв’язана з ними вісь 5 будуть нерухомі. При зупинці або випередженні одного з
коліс на вихідній осі виділяється різниця кутів повороту  , що є кутом
розузгодження.
, що є кутом
розузгодження.
У гвинтовому МД (рис. 3, б), що
складається з гайки 1 і гвинта 2, при наявності розузгодження гвинт
переміщується відносно закріпленої в горизонтальному напрямку гайки вправо або
вліво в залежності від знаку розузгодження.
Конструкція МД повинна повністю
виключати можливість безпосередньої передачі енергії і реактивних крутних
моментів з боку вихідної ланки на вхід МД.
Перевагами МД є висока надійність і
наявність обертального і поступального видів руху вихідного елемента. Проте МД
властиві всі недоліки механічних редукторів: тертя, низька зносостійкість і
обмежений ресурс роботи, низька точність, зумовлена зазорами і технологічні
похибки виготовлення зубчастих коліс і недосконалістю складання (неспівпадання
осей обертання з геометричними осями, відхилення від перпендикулярності). Крім
того, з допомогою МД не можна здійснювати дистанційну передачу, оскільки для
його роботи необхідна безпосередня близькість задавальної і виконавчої осей
приводу. Тому основне застосування МД знаходять в гідравлічних пристроях для
створення внутрішніх зворотних зв’язків, наприклад в гідроприводі з об’ємним
регулюванням або електрогідравлічним підсилювачем. В решти випадках застосування
МД вимагається додатковий пристрій для перетворення механічного сигналу в
електричний.
.Вимірювачі розузгодження на
потенціометрах
Потенціометричні схеми призначені
для вимірювання лінійного або кутового розузгодження з перетворенням на постійному
або змінному струмі. З цією метою використовують потенціометри однообертові з
обмеженим (в межах  ) і
необмеженим кутами повороту, а також багато обертові.
) і
необмеженим кутами повороту, а також багато обертові.
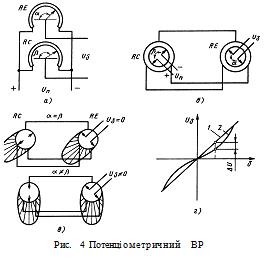
Для дистанційного управління
використовують два потенціометри, кінематично зв’язаних з задавального і
виконавчою осями СП. Потенціометри електрично можуть бути ввімкнені по мостовій
(рис. 4 а) або трьохпровідній (рис. 4, б) вимірювальній схемі. При узгодженому
положенні задавальної та виконавчої осей ( ) міст, утворений передаючими
) міст, утворений передаючими  і
приймаючими
і
приймаючими  потенціометрами,
зрівноважений, і вихідна напруга
потенціометрами,
зрівноважений, і вихідна напруга  , що знімається з вимірювальної
діагоналі мосту (зі щіток), дорівнює нулю. При переміщенні щітки потенціометра на кут
, що знімається з вимірювальної
діагоналі мосту (зі щіток), дорівнює нулю. При переміщенні щітки потенціометра на кут  , а щітки
потенціометра на кут
, а щітки
потенціометра на кут  , де
, де  - кут
розузгодження (похибка), міст виходить з рівноваги, і на виході схеми
з’являється сигнал, пропорційний значенню розузгодження.
- кут
розузгодження (похибка), міст виходить з рівноваги, і на виході схеми
з’являється сигнал, пропорційний значенню розузгодження.
Для СП застосовують датчики кута
повороту типу ПД, ПП, який відрізняється від ПД наявністю кінцевих вимикачів,
ПТП, а також прецизійні ПЛ1-1, ПЛ1-2. технічні дані деяких потенціометрів
приведені в табл.1. Для розширення діапазону роботи СП застосовують кругові
потенціометри типу ПК (двохщіткові) або ПК3 (трищіткові) з необмеженим
обертанням (движка) і трьома або чотирма відводами.
Три провідна вимірювальна схема на
потенціометрах з живленням через зв’язані з задавальною віссю СП рухомі
контакти потенціометра-датчика показана на рис. 4, б. Завдяки
рівномірності намотки потенціометра діаграма розподілу потенціалів по секціях
потенціометра симетрична
(рис. 4, в), а положення максимуму потенціалу відповідає плюсу джерела
живлення, якщо за точку з потенціалом, що дорівнює нулю, прийнято мінус джерела
живлення. Три провідна схема забезпечує аналогічний розподіл потенціалів і на
потенціометрі . Очевидно,
що напруга , яка
знімається зі щіток , буде
дорівнювати нулю тільки в тому випадку, якщо щітки потенціометрів знаходяться в
рівно потенціальних точках. Як видно з вказаних діаграм, ця умова виконується
при взаємно перпендикулярному положенні щіток потенціометрів і . Це
положення, що є положенням узгодження потенціометрів, досягається при на
лаштуванні схеми розворотом щіток потенціометра на кут  по
відношенню до щіток потенціометра . При відсутності розузгодження
щітки потенціометрів і перпендикулярні,
і
по
відношенню до щіток потенціометра . При відсутності розузгодження
щітки потенціометрів і перпендикулярні,
і  . При
повороті задавальної осі (при появі сигналу розузгодження) механічне
переміщення щіток викликає
обертання обох потенціальних діаграм. Нерухомі щітки опиняться в
точках з різними потенціалами і з них знімається напруга сигналу розузгодження.
. При
повороті задавальної осі (при появі сигналу розузгодження) механічне
переміщення щіток викликає
обертання обох потенціальних діаграм. Нерухомі щітки опиняться в
точках з різними потенціалами і з них знімається напруга сигналу розузгодження.
При навантаженнях, що значно перевищують
опір потенціометрів, розглянуті вище схеми ВР забезпечують лінійну залежність
вихідної напруги - сигналу розузгодження:
 .
.
Статична характеристика  в цьому
випадку (режим холостого ходу) є прямолінійною (рис. 4, г). Коефіцієнт
перетворення, що визначається відношенням напруги розузгодження
в цьому
випадку (режим холостого ходу) є прямолінійною (рис. 4, г). Коефіцієнт
перетворення, що визначається відношенням напруги розузгодження
до кута розузгодження  , залежить
від підведеної до схеми напруги живлення
, залежить
від підведеної до схеми напруги живлення  і робочого діапазону потенціометрів
і робочого діапазону потенціометрів
 . Для
нормального функціонування схеми необхідно, щоб робочі діапазони передаючого і
приймаючого потенціометрів
дорівнювали
. Для
нормального функціонування схеми необхідно, щоб робочі діапазони передаючого і
приймаючого потенціометрів
дорівнювали  .
.
Похибки потенціометричних ВР
залежать від багатьох причин і їх розділяють на статичні і динамічні похибки.
Статична похибка складається з
методичної та інструментальної складових. Методична похибка з’являється при
умові, що опір навантаження  співрозмірний з опором
потенціометрів і робить шунтуючу дію. Для схеми, що представлена на рис. 4, а,
вихідна напруга в цьому випадку визначається співвідношенням
співрозмірний з опором
потенціометрів і робить шунтуючу дію. Для схеми, що представлена на рис. 4, а,
вихідна напруга в цьому випадку визначається співвідношенням
де - кутове
положення щітки потенціометру ;
 - коефіцієнт
навантаження,
- коефіцієнт
навантаження,  ;
;
 - максимальний опір
потенціометрів.
- максимальний опір
потенціометрів.
Статична характеристика (крива  на рис. 4,
г) носить нелінійний характер. Похибка від неузгодженого опору і навантаження
на рис. 4,
г) носить нелінійний характер. Похибка від неузгодженого опору і навантаження  зростає зі
зменшенням .
зростає зі
зменшенням .
Методичну похибку можна зменшити
вмиканням на виході ВР елементу з високим вхідним опором (емітерного
повторювача або повторювача напруги).
Статична інструментальна похибка
обумовлена виробничими допусками і конструктивними факторами:
зазорами;
нерівномірністю намотки;
ступінчастістю характеристики;
зоною нечутвливості.
По інструментальній похибці
назначаються класи точності потенціометрів (табл. 2). Для одержання необхідних
характеристик в якості датчика і приймача необхідна вибирати потенціометри
одного класу точності.
Динамічна похибка проявляється у
вигляді шумів, що виникають за рахунок миттєвого порушення контактів при
переході (движка) з витка на виток і при більших швидкостях відпрацювання управляючої
дії.
. Індукційні вимірювачі
розузгодження
В якості ВР змінного струму широкого
застосування набули пристрої трансформаторної синхронної передачі на
електричних індукційних мікро машинах типу сельсинів і обертових
трансформаторів (ОТ).
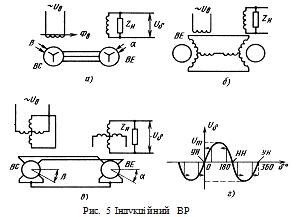
ВР на сельсинах (рис. 5, а)
складається з двох сельсинів: сельсина-датчика  і сельсина-приймача
і сельсина-приймача  . До джерела
живлення змінного струму підключена тільки обмотка збудження сельсина-датчика.
Сельсин-приймач збуджується змінним магнітним потоком
. До джерела
живлення змінного струму підключена тільки обмотка збудження сельсина-датчика.
Сельсин-приймач збуджується змінним магнітним потоком  , що
створюється фазними напругами сельсина-датчика, які передаються
сельсину-приймачу по трипровідному ланцюгу синхронізації. Однофазна обмотка
сельсина-приймача служить для виробітку сигналу розузгодження. Умовно-графічні
зображення схеми на безконтактних сельсинах у відповідності з ГОСТ 2.722-68
дано на рис. 5, б.
, що
створюється фазними напругами сельсина-датчика, які передаються
сельсину-приймачу по трипровідному ланцюгу синхронізації. Однофазна обмотка
сельсина-приймача служить для виробітку сигналу розузгодження. Умовно-графічні
зображення схеми на безконтактних сельсинах у відповідності з ГОСТ 2.722-68
дано на рис. 5, б.
В момент узгодження, що
характеризується взаємно перпендикулярним розташуванням осей однофазних обмоток
сельсинів, сумарний магнітний потік приймача перпендикулярний до осі вихідної
обмотки сельсина приймача і напруга розузгодження . При
наявності рзузгодження механічний поворот ротора сельсина датчика
перетворюється в поворот магнітного потоку сельсина приймача. Цей потік
пронизує однофазну управляючу обмотку, з якої знімається напруга, що
характеризує відхилення сельсинів від положення узгодження:
|
 ,(1) ,(1)
|
|
де  - максимальна
напруга синхронізації.
- максимальна
напруга синхронізації.
Застосування обертових
трансформаторів (ОТ) в якості формувачів сигналу управління зумовлено
підвищенням вимог до точності СП, оскільки схеми на ОТ забезпечують точніше
перетворення кута розузгодження. Найчастіше вимірювання виконують з допомогою
двох ОТ ( і
і  ),
ввімкнених по трансформаторній схемі (рис. 5, в) і працюючих аналогічно ВР на
сельсинах. Схема на ОТ виробляє напругу розузгодження
),
ввімкнених по трансформаторній схемі (рис. 5, в) і працюючих аналогічно ВР на
сельсинах. Схема на ОТ виробляє напругу розузгодження
|
 ,(2) ,(2)
|
|
де  - напруга
живлення;
- напруга
живлення;
 - коефіцієнт
трансформації між обмоткою збудження і вторинною обмоткою.
- коефіцієнт
трансформації між обмоткою збудження і вторинною обмоткою.
Сельсини і ОТ випускаються в
контактному і безконтактному виконанні, корпусні і безкорпусні, з різними
напругами збудження і на різні частоти. Підвищення частоти живлення дозволяє
зменшити розміни датчиків.
Вихідні напруги ВР на сельсинах і ОТ
є неперервною функцією кута розузгодження і містять інформацію, необхідну для
управління СП. Статистична характеристика індукційного ВР, побудована згідно
(2) та (2), носить нелінійний характер (рис. 5, г). Це перечить загальним
вимогам до лінійності характеристик вимірювальних пристрої і приводить до появи
таких недоліків, як непостійність крутизни характеристикики та зміни фази
вихідної напруги не тільки при зміні полярності, але і в залежності від
значення сигналу розузгодження. Як витікає з рис. 5, г, зміна фази, а разом з
нею і напрямок відпрацювання ВД проходить в точках  ,
,  і
і  , що
характеризуються нульовими значеннями вихідної напруги.
, що
характеризуються нульовими значеннями вихідної напруги.
При розузгодженнях, менших  , напрямок
відпрацювання ВД (на рис. 5, г показано стрілками) сприяє усуненню
розузгодження, і привод автоматично приходить в положення стійкої рівноваги при
, напрямок
відпрацювання ВД (на рис. 5, г показано стрілками) сприяє усуненню
розузгодження, і привод автоматично приходить в положення стійкої рівноваги при
 . При
розузгодженні
. При
розузгодженні  напрямок
відпрацювання залежить від коливання напруги в системі: при незначному
збільшенні напруги ВД відпрацьовує сигнал розузгодження до
напрямок
відпрацювання залежить від коливання напруги в системі: при незначному
збільшенні напруги ВД відпрацьовує сигнал розузгодження до  , а у
випадку зменшення напруги - до . Це визначає положення нестійкої
рівноваги системи, тобто точка
, а у
випадку зменшення напруги - до . Це визначає положення нестійкої
рівноваги системи, тобто точка  характеризується як нестійкість
нуль
характеризується як нестійкість
нуль  . При
розузгодженнях, що перевищують , напрямок відпрацювання ВД таке, що
привід буде прагнути до стійкого нуля
. При
розузгодженнях, що перевищують , напрямок відпрацювання ВД таке, що
привід буде прагнути до стійкого нуля  , яки є кут . В принципі
це буде теж положення
, яки є кут . В принципі
це буде теж положення  , але досягається
вно розворотом всього приводу на , що недопустимо з точки зору
початкової виставки приладу, замотування джутів і т.д.
, але досягається
вно розворотом всього приводу на , що недопустимо з точки зору
початкової виставки приладу, замотування джутів і т.д.
З трьох розглянутих положень
узгодження СП тільки положення є точкою стійкої рівноваги та
істинним нулем привода.
Приводи, в яких в якості вимірювача
розузгодження використовуються мікро машини, володіють властивістю
самосинхронізації в межах  . Відмітимо,
що наявність в системі таких великих розузгоджень виключається самим режимом
роботи СП. Вони можливі тільки в моменти ввімкнення приводу, в режимі
перекидання або у випадку, коли переміщення вихідного валу відбувається при
вимкненому живленні. Нормальний режим роботи СП можна обмежити робочою зоною
. Відмітимо,
що наявність в системі таких великих розузгоджень виключається самим режимом
роботи СП. Вони можливі тільки в моменти ввімкнення приводу, в режимі
перекидання або у випадку, коли переміщення вихідного валу відбувається при
вимкненому живленні. Нормальний режим роботи СП можна обмежити робочою зоною  , в межах
якої характеристика лінійна, володіє найбільшою крутизною і допустима заміна
, в межах
якої характеристика лінійна, володіє найбільшою крутизною і допустима заміна  .
.
Замінюючи у виразах (1), (2) , одержимо
|
де  - коефіцієнт
перетворення, що визначається як приріст вихідної напруги при зміні кута
розузгодження на
- коефіцієнт
перетворення, що визначається як приріст вихідної напруги при зміні кута
розузгодження на  :
:  .
.
Для сельсинів
|
 ;(4) ;(4)
|
|
для ОТ
|
 .(5) .(5)
|
|
Зазвичай чутливість сельсинів
складає  , а іноді
може достягати
, а іноді
може достягати  .
.
Похибки трансформаторних схем
вимірювання, що характеризуються залишковими напругами на вихідній обмотці при , так, як і
похибки потенціометричних схем, носять статистичний або динамічний характер.
Як наслідок неузгодження опору
приймача і навантаження виникає методична похибка. В схемах на ОТ цю похибку,
викликану поперечним потоком якоря при навантаженні ОТ, можна зменшити шляхом
замикання квадратурної обмотки накоротко (первинне симетрування) або
одинакового навантаження синусної і косинусної обмоток (вторинне симетрування)
ОТ. При цьому поперечний потік компенсується потоками, що виникають в
квадратурній або косинусній обмотці.
При участі опору навантаження  вихідна
напруга для ВР на сельсинах
вихідна
напруга для ВР на сельсинах
|
 ,(6) ,(6)
|
|
Де  - вихідний опір
сельсина-приймача. Як видно із (6), крутизна вимірювальної схеми зі зменшенням
- вихідний опір
сельсина-приймача. Як видно із (6), крутизна вимірювальної схеми зі зменшенням  падає.
Впливом навантаження можна знехтувати, вибираючи
падає.
Впливом навантаження можна знехтувати, вибираючи  .
.
Статична похибка прямування в
дистанційній передачі залежить від технологічних інструментальних похибок:
неточності взаємного розміщення
обмоток і їх не ідентичності;
асиметрії та не перпендикулярності
обмоток;
наявність ексцентриситету;
зміна зовнішніх умов (температури,
напруги і частоти джерела живлення).
Максимальну похибку визначають по
додатковому куту повороту ротора приймача від положення узгодження, необхідного
для ліквідації остаточної напруги на виході вимірювальної схеми.
Для полегшення підбору пар сельсинів
і ОТ їх поділяють на класи точності в залежності від середньої інструментальної
похибки, що визначається як півсума максимальних похибок при обертанні давача
за годинниковою стрілкою і проти:
|
 ,(7) ,(7)
|
|
Технічні дані індукційних перетворювачів з
вказівкою середньої максимальної похибки для різних класів точності наводяться
в довідниках. ОТ, що випускаються промисловістю забезпечують велику
інструментальну точність порівняно з сельсинами завдяки особливій технології
виготовлення пластин магніто проводу.
Швидкісна (динамічна) похибка обумовлена
наявністю ЕРС обертання і залежить від частоти обертання сельсинів. Ця похибка
визначається виразом

де  - амплітуда
похибки;
- амплітуда
похибки;
 - несуча частота;
- несуча частота;
 - кут зсуву по фазі напруги
похибки відносно вихідної напруги сельсина-приймача і ОТ-приймача.
- кут зсуву по фазі напруги
похибки відносно вихідної напруги сельсина-приймача і ОТ-приймача.
Співпадаюча по фазі з корисним
сигналом синфазна складова  може бути скомпенсована відповідним
поворотом ротора приймача. Зсунута по фазі на квадратурна складова
може бути скомпенсована відповідним
поворотом ротора приймача. Зсунута по фазі на квадратурна складова  не
піддається компенсації і збільшує нагрівання ВД і насиченість підсилювача.
Квадратурна похибка залежить від співвідношення між частотою обертання
сельсинів
не
піддається компенсації і збільшує нагрівання ВД і насиченість підсилювача.
Квадратурна похибка залежить від співвідношення між частотою обертання
сельсинів  та несучою
частотою . При
та несучою
частотою . При  швидкісною
похибкою можна знехтувати. Проте якщо ці частоти спів розмірні, то похибка
значна. Наприклад, похибка у сельсинів з частотою живлення
швидкісною
похибкою можна знехтувати. Проте якщо ці частоти спів розмірні, то похибка
значна. Наприклад, похибка у сельсинів з частотою живлення  досягає
досягає  при частоті
обертання
при частоті
обертання  , у
сельсинів з частотою живлення
, у
сельсинів з частотою живлення  при тій же частоті обертання вона
складає
при тій же частоті обертання вона
складає  .
.
Таким чином, одним із способів
зниження квадратурної похибки є зменшення робочої частоти обертання сельсинів,
але при врахуванні вимог ТЗ (технічного завдання). Інший спосіб усунення
квадратурної похибки - застосування в підсилювачі СП фазочутливість каскаду, що
володіє властивістю не пропускати сигнали, зсунуті на відносно
корисної складової.
Додаткова динамічна похибка
появляється від вищих гармонік і зсунута відносно напруги живлення також на . Для
зменшення цієї складової застосовують фільтри, що подавлюють гармонічні
складові сигналу розузгодження.
5. Методи підвищення точності
Похибка СП складається з похибки слідкування
і з похибок, притаманних окремим елементам, в тому числі сельсинам. Із всіх
розглянутих вище похибок сельсинів (в меншій степені ОТ) найсуттєвішою є
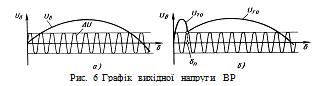
інструментальна, що визначається класом точності перетворювача. Рівень
остаточної напруги , що
відповідає похибці (рис.6, а), при невеликих кутах розузгодження перевищує
рівень корисного сигналу , і СП
початкового розузгодження „відчувати” не буде. Вплив похибки можна зменшити,
збільшити крутизну статичної характеристики ВР за рахунок введення редуктора в
двоканальній (двошвидкісній) системі вимірювача (рис. 6, б). Редуктор дозволяє
різко збільшити напругу, що знімається, при тих же значеннях похибки і зменшує
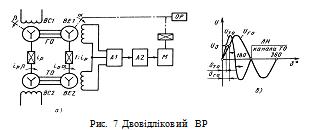
виплив неточності виготовлення сельсинів. Вимірювальна схема в цьому випадку
(рис.7, а) складається з двох пар сельсинів. Одна пара сельсинів  та
та  пов’язана з
задавальним і виконавчим валами СП безпосередньо, а інша пара сельсинів
пов’язана з
задавальним і виконавчим валами СП безпосередньо, а інша пара сельсинів  та
та  - через
редуктор. Передаточне число
- через
редуктор. Передаточне число  редуктора вибирають таким, щоб
сельсини другої пари обертались швидше. Вони утворюють канал точного відліку
редуктора вибирають таким, щоб
сельсини другої пари обертались швидше. Вони утворюють канал точного відліку  на відміну
від каналу грубого відліку
на відміну
від каналу грубого відліку  з передачею кута в масштабі
з передачею кута в масштабі  .
.
При повороті задавального валу на
кут здавачі
каналу ГВ повернеться на такий же кут, а датчик каналу  - на кут
- на кут  .
.
Розузгодження між сельсинами по
каналу внаслідок
цього
збільшується в разів, що
сприяє підвищенню крутизни характеристики і чутливості схеми (див. рис. 6, б).
Напруга на затискачах однофазних обмоток сельсинів:
|
 ,(8) ,(8)
|
|
|
 ,(9) ,(9)
|
|
де  і
і  - напруги,
що визначаються неточністю виготовлення сельсинів.
- напруги,
що визначаються неточністю виготовлення сельсинів.
Обидві напруги находять на вхід
синхронізуючого пристрою  (див. рис.
7, а), що підключає один з каналів до підсилювача
(див. рис.
7, а), що підключає один з каналів до підсилювача  СП.
Виконавчий двигун
СП.
Виконавчий двигун  , відкидаючи
розузгодження, буде обертати вихідний вал приводу і приймаючі сельсини до того
часу, поки обидві напруги, що знімаються, не стануть рівними нулю. Проте в
положенні розузгодження ротори сельсинів по обох каналах будуть повернуті
відносно роторів сельсинів на кути, що визначаються власною
похибкою сельсинів. При використанні сельсинів одного класу точності
, відкидаючи
розузгодження, буде обертати вихідний вал приводу і приймаючі сельсини до того
часу, поки обидві напруги, що знімаються, не стануть рівними нулю. Проте в
положенні розузгодження ротори сельсинів по обох каналах будуть повернуті
відносно роторів сельсинів на кути, що визначаються власною
похибкою сельсинів. При використанні сельсинів одного класу точності  похибка
передачі кута згідно (7) і (9) по каналу
похибка
передачі кута згідно (7) і (9) по каналу 
 , по каналу, по каналу
, по каналу, по каналу 
 .
.
З порівняння одержаних виразів
слідує, що
|
 ,(10) ,(10)
|
|
Точність вимірювання кута
розузгодження порівняно з одноканальною трансформаторною передачею збільшилась
в разів.
Проте з підвищенням швидкості, і, як
наслідок, крутизни статичної характеристики період зміни вихідної напруги
зменшується, і одному періоду напруги каналу  буде відповідати деяке число
періодів зміни напруги каналу , що дорівнює передаточному числу . Так, при
буде відповідати деяке число
періодів зміни напруги каналу , що дорівнює передаточному числу . Так, при  (рис. 7, б)
за половину періоду напруги
(рис. 7, б)
за половину періоду напруги  напруга
напруга  пройде
повний період зміни. Здатність до самосинхронізації в межах одного оберту по
каналу зберігається,
але діапазон самосинхронізації в перерахунку до каналу скорочується
в разів.
пройде
повний період зміни. Здатність до самосинхронізації в межах одного оберту по
каналу зберігається,
але діапазон самосинхронізації в перерахунку до каналу скорочується
в разів.
В результаті в межах  у привода
з’являється
у привода
з’являється  стійких
хибних нулів. Наприклад, при привод, будучи розу згодженим на
кут
стійких
хибних нулів. Наприклад, при привод, будучи розу згодженим на
кут  ,
відпрацьовує до положення
,
відпрацьовує до положення  , що є
додатковим хибним нулем
, що є
додатковим хибним нулем  каналу . Для
усунення хибних розузгодження і забезпечення нормальної роботи СП при великих
кутах розузгодження служить канал . Робота двошвидкісної системи ВР
будується так, щоб при невеликій похибці розузгодження вихідний сигнал
знімається з каналу , а при
великому - з каналу , що
забезпечує синхронізацію в межах повного оберту.
каналу . Для
усунення хибних розузгодження і забезпечення нормальної роботи СП при великих
кутах розузгодження служить канал . Робота двошвидкісної системи ВР
будується так, щоб при невеликій похибці розузгодження вихідний сигнал
знімається з каналу , а при
великому - з каналу , що
забезпечує синхронізацію в межах повного оберту.
Як видно з графіку залежності
вихідного сигналу від кута розузгодження (рис. 7, б), вплив неточності
виготовлення сельсинів на малих розузгодженнях зменшене за рахунок збільшення
крутизни характеристики. В цьому перевага двошвидкісної системи вимірювання. На
графіку відмічено кут перемикання  , при котрому відбувається зміна
роботи каналів вимірювача.
, при котрому відбувається зміна
роботи каналів вимірювача.
Практично СП працює від каналу , здійснюючи
режим слідкування. Канал підключається
тільки при відпрацюванні великих розузгоджень, котрі можуть виникнути в момент
вмикання або в режим перекидання, коли задавальний вал зупиняється, а
виконавчий вал продовжує обертатися.
При проектуванні двошвидкісного ВР
суттєве значення має вибір передаточного числа механічного редуктора. З точки
зору підвищення точності СП вигідно застосовувати більше передаточне число
редуктора. Але безмежне його збільшувати недоцільно, оскільки при цьому
зростають розміри редуктора і пов’язані з ними похибки механічної передач:
неточність виготовлення зубчастих коліс, неточність складання, зазори і т.д. Ці
похибки можуть досягати декількох хвилин. Оскільки при виконанні редуктора по
6-ій степені точності похибка, зумовлена неточністю їх виготовлення,  . Похибка
зазору
. Похибка
зазору  .
.
З врахуванням кутової похибки
механічного редуктора похибка прямування системи, що визначається за (10), буде
мати вид
|
 ,(11) ,(11)
|
|
де  - похибка
сельсинів, що визначається класом точності;
- похибка
сельсинів, що визначається класом точності;
 - похибка редуктора з передаточним
числом , що
залежить від степені точності виготовлення коліс.
- похибка редуктора з передаточним
числом , що
залежить від степені точності виготовлення коліс.
Як випливає з виразу (11),
збільшення передаточного числа дає суттєве зменшення похибки до
тих пір, поки не стає
спів розмірною з похибкою механічного редуктора.
Наприклад, якщо при заданому  вибрати
редуктор з
вибрати
редуктор з  ,
,  ,
,  , то
, то  . Якщо
застосувати редуктор з
. Якщо
застосувати редуктор з  , то
, то  ,
,  , то
, то  .
.
Крім того, підвищення швидкості
сельсинів проявляється і на динамічній похибці, тому для приладних редукторів,
що пов’язують сельсини і ,
рекомендується використовувати передаточні числа  .
.
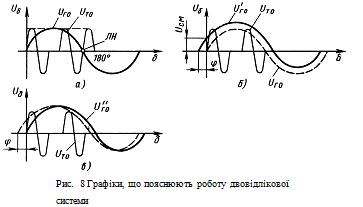
Суттєвим для ВР є також вибір
парного чи непарного передаточного числа редуктора. Для простоти перерахунку
кутів передаточне число повинно бути парним. Але, як бачимо з рис. 8, а, при
цьому появляється ймовірність хибного узгодження по куту , оскільки
нестійкий нуль каналу співпадає з
стійким нулем каналу (при
непарному такої
ймовірності не існує). При розузгоджених в СП, що відповідають умові  , і при
, і при  привод за
точним відліком буде забезпечувати узгодження до найближчого стійкого нуля,
тобто до . В
дійсності між вихідним і задавальним валами буде розузгодження в , і в
подальшому рух задавального валу буде відпрацьовуватися з такою похибкою.
привод за
точним відліком буде забезпечувати узгодження до найближчого стійкого нуля,
тобто до . В
дійсності між вихідним і задавальним валами буде розузгодження в , і в
подальшому рух задавального валу буде відпрацьовуватися з такою похибкою.
Щоб усунути хибний нуль, до вихідної
напруги каналу добавляють
напругу зміщення  , що
знімається з вторинної обмотки малопотужного трансформатора (суцільна крива на
рис. 8, б). В цьому випадку при напруга каналу
, що
знімається з вторинної обмотки малопотужного трансформатора (суцільна крива на
рис. 8, б). В цьому випадку при напруга каналу  більша
напруги . І привод
буде узгоджуватися по каналу до стійкого істинного нуля. Проте
зміщення напруги призводить до того, що в узгодженому положенні напруга каналу не дорівнює
нулю,
більша
напруги . І привод
буде узгоджуватися по каналу до стійкого істинного нуля. Проте
зміщення напруги призводить до того, що в узгодженому положенні напруга каналу не дорівнює
нулю,  . Для
усунення цього явища статор передаючого сельсина розвертають відносно статора
приймаючого сельсина на кут
. Для
усунення цього явища статор передаючого сельсина розвертають відносно статора
приймаючого сельсина на кут
 ,
,
де - амплітуда
вихідної напруги.
Вихідна напруга каналу в цьому
випадку
 ,
,
напруги по обох виходах при дорівнюватимуть
нулю і крива  (рис. 8, в)
зміститься вправо на кут .
(рис. 8, в)
зміститься вправо на кут .
. Багатополюсні перетворювачі
Підвищення вимог до точності ВР
обумовило появу багатополюсних перетворювачів, створених на базі індукційних
мікро машин шляхом збільшення числа пар ротора і статора. Амплітуда вихідної
напруги такого перетворювача здійснює повний період зміни за поворот ротора
відносно статора на один полюс, а число періодів зміни за повний поворот ротора
дорівнює числу пар полюсів, тобто
 ,
,
де  - число
пар полюсів.
- число
пар полюсів.
Оскільки ефект багато періодичності
вихідного сигналу створюється не механічним шляхом (за рахунок редуктора), а
електрично, то пристрої, що реалізують цей принцип, називаютьсяються
перетворювачами з електричною редукцією. Передаточне число такого редуктора
визначається числом пар полюсів  . ВР на багатополюсних
перетворювачах будують за принципом двоканальної системи відліку, оскільки
число стійких положень, як і при механічному редукторі, визначається
передаточним відношенням редуктора.
. ВР на багатополюсних
перетворювачах будують за принципом двоканальної системи відліку, оскільки
число стійких положень, як і при механічному редукторі, визначається
передаточним відношенням редуктора.
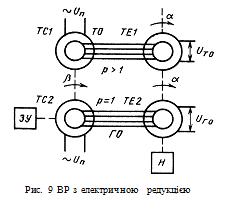
У ВР з електричною редукцією (рис.
9) в якості датчика і приймача в каналі використовуються однополюсні перетворювачі
 , а в каналі
, а в каналі
 -
багатополюсні
-
багатополюсні  . Датчики
(аналогічно і приймачі) каналів і пов’язані між собою одним валом і
мають однакову частоту обертання. Але оскільки число пар полюсів різне, сигнал
в каналі буде
змінюватися в разів
частіше, ніж в каналі . В іншому
ВР працює аналогічно двоканальному вимірювачу з механічним редуктором. Але має
явні переваги:
. Датчики
(аналогічно і приймачі) каналів і пов’язані між собою одним валом і
мають однакову частоту обертання. Але оскільки число пар полюсів різне, сигнал
в каналі буде
змінюватися в разів
частіше, ніж в каналі . В іншому
ВР працює аналогічно двоканальному вимірювачу з механічним редуктором. Але має
явні переваги:
відсутність похибки, обумовленої
неточністю виготовлення редуктора, і, як наслідок, підвищенням точності
передачі пропорційно числу пар полюсів;
менша динамічна похибка за рахунок
зниження частоти обертання датчиків каналу ;
мале значення відношення мінімальної
напруги до крутизни, що характеризує рівень залишкової напруги: длясхем з
однополюсними перетворювачами при 
 .
.
В якості багатополюсних
перетворювачів широкого застосування набули багатополюсні ОТ, редуктосини,
індуктосини. Ці пристрої розрізняються конструктивно, принципом дії,
технологією виготовлення, але принцип електричної редукції закладений в кожному
з них, що дозволяє одержати високу точність перетворення.
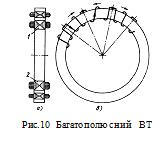
Багатополюсні ОТ (рис. 10, а)
виконуються у вигляді тороїдальних неявнополюсних ротора і статора з
рівномірно розподіленими обмотками кільцевого типу. Зсунуті по фазі на відносно
одна одної обмотки розташовуються шарами: перший шат - обмотка синусна, другий
- обмотка косинусна. Збільшення числа пар полюсів досягається за рахунок зміни
напрямку намотки обмотки фази (на рис. 10,б для простоти зображена тільки одна
обмотка).
Крім того, на практиці знаходять
застосування ОТ, виконані по трьохобмоточній схемі: на роторі вкладаються
двохполюсна однофазна обмотка збудження, а дві вихідні обмотки за рахунок
спеціальної укладки обмотки фази вкладаються в пази статора - так звані синусні
або косинусні розподілені обмотки.
При створенні двоканальних систем ВР
використовують ОТ з різними конструктивними виконаннями:
безкорпусна конструкція (рис. 10,
а);
кріплення на одній осі однополюсного
і багатополюсного ОТ;
вбудована конструкція (двополюсний
ОТ всередині багатополюсного);
розміщення обмоток багатополюсного
ОТ з обмотками двополюсного ОТ на одному магніто проводі з використанням одних
і тих же пазів.
Багатополюсні ОТ відрізняються малим
коефіцієнтом послаблення вихідного сигналу, мають похибку не більше  ,але
вимагають наявності контактів при необмеженому куті повороту ротора.
Перспективним є застосування безконтактних уніполярних ОТ з трьома обмотками і
зубцевим ротором.
,але
вимагають наявності контактів при необмеженому куті повороту ротора.
Перспективним є застосування безконтактних уніполярних ОТ з трьома обмотками і
зубцевим ротором.
Індукційні редуктори відносяться до
безконтактних синусно-косинусних обертовим трансформаторам з електричною
редукцією. Конструктивно редуктосин складається (рис. 11, а) з зубцевого
статора, на якому розташовані як первинна , так і дві вторинні ,  вихідні
обмотки. Ротор представляє собою зубчасте колесо, число зубців якого знаходиться
у співвідношенні
вихідні
обмотки. Ротор представляє собою зубчасте колесо, число зубців якого знаходиться
у співвідношенні  з числом
зубців статора. До первинної обмотки підводиться напруга живлення. При повороті
ротора на кут, що дорівнює одній зубцевій поділці (один полюс), вихідна напруга
на обмотці пройде
повний період і буде змінюватися по закону синуса, а на обмотці , зсунутій
на , - по
закону косинуса.
з числом
зубців статора. До первинної обмотки підводиться напруга живлення. При повороті
ротора на кут, що дорівнює одній зубцевій поділці (один полюс), вихідна напруга
на обмотці пройде
повний період і буде змінюватися по закону синуса, а на обмотці , зсунутій
на , - по
закону косинуса.
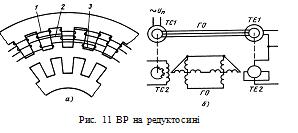
Редуктосини застосовують в якості
вимірювачів розузгодження в СП, в яких внаслідок вимог високої точності
передачі кута не може бути використана механічна передача. В такому СП (рис.
11, б) канал будується
на редуктосині  , що працює
в синхронній передачі з однополюсним ОТ. Повороту редуктосина на одну зубцеву
поділку відповідає повний поворот ротора
, що працює
в синхронній передачі з однополюсним ОТ. Повороту редуктосина на одну зубцеву
поділку відповідає повний поворот ротора  на , що дозволяє з великою точністю
відрахувати кут повороту задавального вала. При повороті ротора редуктосина на ротор повернеться
на
на , що дозволяє з великою точністю
відрахувати кут повороту задавального вала. При повороті ротора редуктосина на ротор повернеться
на  , де -
передаточне відношення редуктора. Канал побудований на двополюсних
, де -
передаточне відношення редуктора. Канал побудований на двополюсних  і
і  і служить
для забезпечення самосинхронізації. Робота двоканальної системи з редуктосином
аналогічна роботі ВР, показаного на рис. 9, але має похибку не більше
і служить
для забезпечення самосинхронізації. Робота двоканальної системи з редуктосином
аналогічна роботі ВР, показаного на рис. 9, але має похибку не більше  при
електричній редукції, що дорівнює
при
електричній редукції, що дорівнює  або
або  . Подальше збільшення точності
обмежене похибкою нарізування зубчастих коліс і особливо коліс ротора.
. Подальше збільшення точності
обмежене похибкою нарізування зубчастих коліс і особливо коліс ротора.
Необхідно також відмітити таку
перевагу редуктосинів перед ОТ, як відсутність контактів.
Індуктосини - це перетворювачі з
багатополюсними печатними провідниками (обмотками), радіально нанесеними на
ізоляційні диски. Завдяки відсутності ковзаючих контактів підвищується
надійність перетворювачів, а редукція до  досягається при достатньо малих
розмірах за рахунок технології нанесення печатних провідників. ВР на
індуктосинах працюють з похибкою не більше
досягається при достатньо малих
розмірах за рахунок технології нанесення печатних провідників. ВР на
індуктосинах працюють з похибкою не більше  , але мають низький вихідний сигнал
, але мають низький вихідний сигнал  , тому
вимоги до підсилювачів доволі жорсткі.
, тому
вимоги до підсилювачів доволі жорсткі.
Подальше збільшення точності може
бути забезпечене з допомогою магніторезистивних перетворювачів, що є
вдосконаленими індуктосинами. Радіальні провідники в них виконані з
магніторезистивного напівпровідникового складу, який змінює свою провідність в
залежності від магнітного поля. При цьому зменшується вплив низки технологічних
похибок, властивих індуктосинам. Магніторезистивні перетворювачі можуть
працювати на постійному струмі, що суттєво спрощує структуру їх відлікової
частини і приводить до підвищення роздільної здатності і надійності
перетворювача в цілому. Магнітне поле може бути створене також з застосуванням
печатних обмоток, радіальні провідники яких виконані у виді постійних магнітів.
Високоточні індуктосини і
магніторезистивні перетворювачі використовують в основному в цифрових СП в
якості перетворювачів неперервного сигналу в дискретний. У зв’язку з цим
виникла необхідність в одержанні електричної редукції з передаточним
відношенням, кратним  , тобто
, тобто  ,
,  ,
,  ,
,  . Основним
утрудненням при створенні таких перетворювачів є одержання малих розмірів, що
обумовлено недосконалістю технології виготовлення і складання.
. Основним
утрудненням при створенні таких перетворювачів є одержання малих розмірів, що
обумовлено недосконалістю технології виготовлення і складання.
7. Вибір керувача
При виборі керувача (К) необхідно
враховувати наступні фактори:
фізичну природу величини, що
регулюється;
діапазон роботи і характер зміни
задавального і вихідного сигналів (поступальне чи кутове);
необхідну точність перетворення,
чутливість, зону нечутливості;
швидкодію;
вплив на роботу КП зовнішніх умов
експлуатації: те
мператури, тиску, вологості,
вібрацій;
допустимі розміри, масу, термін
служби, надійність і т.д.
Врахувати при виборі конкретного К
всі перераховані фактори явно неможливо, оскільки деякі з них суперечливі.
Оскільки, при задоволенні вимог підвищеної надійності нехтують технологічними і
економічними факторами, віддаючи перевагу більш складний по технології
виготовлення безконтактний сельсин контактному. А оскільки точносні параметри
безконтактних сельсинів нижчі, то точність перетворення сигналу при цьому також
зменшується. Дотримуючись загальної тенденції мікромініатюризації апаратури,
підвищують вимоги до розмірів датчиків. Проте із зменшенням розмірів елементів
точність індукційних мікромашин понижується.
Із всієї сукупності факторів і вимог
при виборі К у виді ВР на потенціометрах або індукційних мікро машинах основним
критерієм є точність, що визначається інструментальною похибкою виготовлення
елементів. Ця похибка не піддається компенсації і безпосередньо входить в
статичну похибку всього СП. При проектуванні вважають, що на долю ВР припадає  результуючої
статичної похибки приводу, тобто
результуючої
статичної похибки приводу, тобто
|
 .(12) .(12)
|
|
Якщо одно канальні схеми на
потенціометрах, що вимірюють власну інструментальну похибку  , не
задовольняють заданої точності, застосовують трансформаторі дистанційні
передачі на сельсинах і ОТ. Перевагу при цьому віддається прецизійним ОТ, що
дозволяють знизити похибку передачі кута до
, не
задовольняють заданої точності, застосовують трансформаторі дистанційні
передачі на сельсинах і ОТ. Перевагу при цьому віддається прецизійним ОТ, що
дозволяють знизити похибку передачі кута до  порівняно з похибкою
порівняно з похибкою  , характерною
для сельсинів. Застосуванням двоканальної передачі кута на сельсинах і ОТ та
механічному редукторі можна добитися зниження похибки до
, характерною
для сельсинів. Застосуванням двоканальної передачі кута на сельсинах і ОТ та
механічному редукторі можна добитися зниження похибки до  . Умова (12)
в цьому випадку можна записати в наступному виді:
. Умова (12)
в цьому випадку можна записати в наступному виді:
|
 .(13) .(13)
|
|
Подальше збільшення точності
передачі кута забезпечується застосуванням багатоканальних перетворювачів з
електричною редукцією. Електрична редукція виключає похибки зубчастої передачі
і доводить точність до  .
.
Після попереднього визначення типу
ВР (індукційного, потенціометричного) переходять до вибору датчика і приймача з
числа рекомендованих для застосування. Технічні дані різних типів
потенціометрів наводяться в довідниках.
Оскільки похибка ВР складається з
похибок датчиків і приймача, то для підвищення точності передачі кута
розузгодження обидва елементи вибирають одного класу точності, так щоб
інструментальна похибка була меншою або дорівнювала допустимій похибці, що розраховується
за (12):  .
.
Пари підбирають у відповідності з
рекомендаціями, що подаються в паспорті, або за вказаному призначенню:
літерою Д позначають датчики (СЛ,
ВТДП-Д);
буквами П або ПТ - приймачі (СПТ,
ВТДП-П).
Крім того, пари підбирають з
врахуванням параметрів спряження. Для ОТ такими параметрами є напруга живлення  , частота
, частота  , коефіцієнт
трансформації
, коефіцієнт
трансформації  ; для
сельсинів - напруга живлення
; для
сельсинів - напруга живлення  , частота
, частота  ,
максимальна напруга синхронізації - найбільша напруга, що знімається з
двох фаз обмоток синхронізації. Наприклад, сельсину-датчику НД-404П
,
максимальна напруга синхронізації - найбільша напруга, що знімається з
двох фаз обмоток синхронізації. Наприклад, сельсину-датчику НД-404П  відповідає
сельсин-приймач БС-155А з такими ж параметрами, а ВТДП-Д типу СКТ-225-2Д відповідає
ВТДП-П типу СКТ-225-2П з однаковими параметрами
відповідає
сельсин-приймач БС-155А з такими ж параметрами, а ВТДП-Д типу СКТ-225-2Д відповідає
ВТДП-П типу СКТ-225-2П з однаковими параметрами  .
.
Параметрами для потенціометрів є
напруга живлення . Крутизна
статичної характеристики, залежні від діапазону зміни робочого кута. Якщо
діапазони роботи потенціометрів неоднакові, то ідентичності характеристик
досягають введенням у ланцюг потенціометрів додаткових резисторів.
При виборі потенціометрів особливу
увагу приділяють підбору їх опору для узгодження з навантаженням і зменшення
методичної похибки. Для полегшення узгодження потенціометри кожної серії
випускають з різними номіналами опорів. Номінал опору вибирають за похибкою,
обумовленою нелінійністю характеристики і визначаються класом точності
потенціометра.
Для двоканальної системи передачі
кута на сельсинах і ОТ передаточні відношення редуктора
|
 ,(14) ,(14)
|
|
де  - похибка,
що визначається класом точності сельсинів і ОТ.
- похибка,
що визначається класом точності сельсинів і ОТ.
перетворювач
розузгодження потенціометр
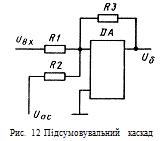
Необхідною умовою застосування
сумуючого каскаду (рис. 12) в якості ПК є не лінійність додавання вихідних
сигналів.
Додавання сигналів реалізують з
допомогою схем послідовного і паралельного додавання. Оскільки схема
послідовного додавання - додавання напруг - має меншу завадостійкість, перевагу
віддають схемі паралельного додавання (див. рис. 12) - додаванням струмів.
Параметри схеми додавання сигналів визначаються вхідними опорами сумуючого
підсилювача і опором навантаження. Якщо схема додавання не задовольняє умови
високоомного навантаження (наприклад, при надходженні вхідного сигналу з
аналогової ЕОМ), то послідовно з джерелами вхідних сигналів ставлять додаткові
резистори  і
і  , опір яких
буде залежати від внутрішнього опору джерела вхідного сигналу.
, опір яких
буде залежати від внутрішнього опору джерела вхідного сигналу.
 .
.
Література
1.
Алиев, И.И. Электротехника и электрооборудование: Справочник: Учебное пособие
для вузов / И.И. Алиев. - М.: Высш. шк., 2010. - 1199 c.
.
Аполлонский, С.М. Теоретические основы электротехники. Электромагнитное поле:
Учебное пособие / С.М. Аполлонский. - СПб.: Лань, 2012. - 592 c.
.
Башарин, С.А. Теоретические основы электротехники: Теория электрических цепей и
электромагнитного поля: Учебное пособие для студ. высш. учеб. заведений / С.А.
Башарин, В.В. Федоров. - М.: ИЦ Академия, 2010. - 368 c.
.
Белов, Н.В. Электротехника и основы электроники: Учебное пособие / Н.В. Белов,
Ю.С. Волков. - СПб.: Лань, 2012. - 432 c.
.
Бессонов, Л.А. Теоретические основы электротехники. Электрические цепи: Учебник
для бакалавров / Л.А. Бессонов. - М.: Юрайт, 2013. - 701 c.
.
Борисов, Ю.М. Электротехника / Ю.М. Борисов, Д.Н. Липатов, Ю.Н. Зорин. - М.:
Энергоатомиздат, 1985.
.
Буртаев, Ю.В. Теоретические основы электротехники: Учебник / Ю.В. Буртаев, П.Н.
Овсянников; Под ред. М.Ю. Зайчик. - М.: ЛИБРОКОМ, 2013. - 552 c.
.
Бутырин, П.А. Электротехника: Учебник для начального проф. образования / П.А.
Бутырин, О.В. Толчеев, Ф.Н. Шакирзянов. - М.: ИЦ Академия, 2012. - 272 c.
.
Гальперин, М.В. Электротехника и электроника: Учебник / М.В. Гальперин. - М.:
Форум, НИЦ ИНФРА-М, 2013. - 480 c.
.
Данилов, И.А. Общая электротехника: Учебное пособие для бакалавров / И.А.
Данилов. - М.: Юрайт, ИД Юрайт, 2013. - 673 c.
.
Ермуратский, П.В. Электротехника и электроника / П.В. Ермуратский, Г.П.
Лычкина, Ю.Б. Минкин. - М.: ДМК Пресс, 2013. - 416 c.
.
Жаворонков, М.А. Электротехника и электроника: Учебное пособие для студ. высш.
проф. образования / М.А. Жаворонков, А.В. Кузин. - М.: ИЦ Академия, 2013. - 400
c.
.
Иньков, Ю.М. Электротехника и электроника: Учебник для студентов учреждений
среднего профессионального образования / Б.И. Петленко, Ю.М. Иньков, А.В. Крашенинников.
- М.: ИЦ Академия, 2013. - 368 c.
.
Касаткин, А.С. Электротехника / А.С. Касаткин, М.В. Немцов. - М.: Энергоиздат,
1983.
.
Киреева, Э.А. Полный справочник по электрооборудованию и электротехнике (с
примерами расчетов) / С.Н. Шерстнев, Э.А. Киреева; Под общ. ред. С.Н.
Шерстнева. - М.: КноРус, 2013. - 864 c.