|
А15
|
А14
|
А13
|
А12
|
А11
|
А10
|
А9
|
А8
|
А7
|
А6
|
А5
|
А4
|
А3
|
А2
|
А1
|
А0
|
|
Анозп
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
Акозп
|
0
|
0
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
|
Анпзп
|
0
|
1
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
Акпзп
|
0
|
1
|
0
|
0
|
0
|
0
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
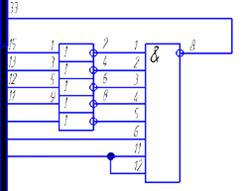
Вибираємо мікросхему
дешифратора ОЗП.
Так як кількість
мікросхем ОЗП рядків дорівнює 1, то вибираємо мікросхему К155ИД7 яка являє
собою 2-розрядний дешифратор, що дозволяє перетворювати код, що поступає на
адресні входи, в напругу низького логічного рівня, яка проявляється на одному з
4 виходів: 3-0.
 .
.
Умовно-графічне
позначення дешифратора
Вибираємо мікросхему
дешифратора ПЗП.
Дешифратора адреси для
ПЗП
2.3 Розробка блоку
клавіатури
Клавіатура побудована
динамічним методом, який складається з наступних частин: кнопка, генератор
тактових імпульсів, схема вгамування дзенькоту контактів, вентиль, лічильник,
схема індикації та пам'ять.
Генератор тактових
імпульсів використовується для тактування роботи клавіатури у режимі натискання
клавіш.
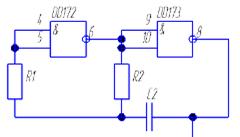
Схема
генератора тактових імпульсів
Резистор R2
використовується як обмежник і його опір повинен бути більшим за 1кОм, а для
того, щоб він не впливав на розрахункову частоту, номінал резистора R1 обираємо
на багато більше R2. При використанні неполярного конденсатора C2 тривалість
імпульсів (tі) та пауза (tп) будуть майже однаковими і розраховуватимуться за
формулою.
і=
tп=0,7R1C2
де tі - тривалість
імпульсів генератора, с;п - тривалість паузи генератора, с;- опір резистора R1,
Ом;- ємність конденсатора С2, Ф.
Для того, щоб
інформація, висвітлена на індикації блоку клавіатури, була доступною для
розуміння тривалість імпульсу та пауза повинні бути неменше 0,5 с. Для
досягнення необхідного результату обираємо конденсатор R1 ємністю 100кОм, а
ємність кондтнсатора С2 розраховуємо.
С2 = 0,5/(0,7 × 100 × 103)= 714,3 × 10-6Ф
З довідника / 3 /
вибираємо типи резисторів та конденсатора.: МЛТ - 0,125 - 100кОм ± 5%: МЛТ -
0,125 - 1кОм ± 5%: КМ 5б - М470 - 710мкФ.
Клавіша прямого та
зворотного відліку мають дзенькіт контакту, що спричинює незручність при
безпосередній подачі сигналів на входи мікросхем. Для його подавлення
використовується спеціальний блок - блок подавлення дзенькоту контакту.
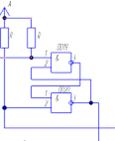
Схема блока подавлення
дзенькоту контакту
Для того, щоб визначити
кількість натискань на клавішу використовуємо мікросхему К155ИЕ6, що є
двійково-десятковим реверсивним чотирьох розрядним лічильником.
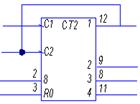
Умовне графічне
позначення мікросхеми К155ИЕ5
Для того, щоб
забезпечити клавіатуру на 14 клавіш необхідно викорстовувати дві мікросхеми
К155ИЕ6, що з’єднані у каскад. Схема включення мікросхем в каскад представлена
на рисунку 3.19. При такому з’єднанні на виходах мікросхем формується двійковий
код натиснутої клавіші. Так як клавіатура повинна мати 14 клавіш, тобто з
лічильників виходить код від 0 до 13, коефіцієнт переліку зупиняє свою роботу
при появі одиниці на виході 6 другого лічильника.
Обидві мікросхеми
видають сигнали на дешифратори індикації К514ИД1, за допомогою яких
визначається які цифри будуть відображатися на семи сегментних індикаторах.
Таким чином на індикації відображається номер натиснутої клавіші.
Умовне графічне
зображення дешифратора індикації К514ИД1
2.4 Розробка блоку
індикації
Одним із важливих вузлів
МПС є пристрої відображення інформації. Це зв’язано з тим, що при експлуатації
більшість МПС присутність опе-ратора обов’язкова. В завданні до курсового
проекту блок індикації міс-тить 4 напівпровідникові індикатори АЛС324А.
Для висвітлення символів
індикаторах реалізовано 7 сегментів, тому на вхід індикатора необхідно подавати
7 розрядний код. Для пере-творення 4 розрядного коду в 7 розрядний код
керування сегментами будемо використовувати мікросхему К514ИД1.
Інтегральна мікросхема
К514ИД1 є дешифратором і призначена для керування сегментним індикатором із
загальними катодами. Дешифратор зроблений за ТТЛ - технологією.
Умовне графічне
позначення мікросхеми К514ИД1
Для постійного
висвітлення символів двійковий код необхідно за-пам’ятовувати. Тому для
збереження інформації, а також для можливості підключення до шини даних
вибираємо мікросхему К555ИР23, яка є восьми розрядним регістром - фіксатором з
трьома станами на виходах. Переведення виходів в активний стан відбувається при
наявності логіч-ного нуля на вході. Запис інформації відбувається по передньому
фронту символу на вході С.
Умовне графічне
позначення мікросхеми К555ИР23
Згідно завдання до
курсового проекту індикація повинна керуватися статичним методом.
Для забезпечення
статичної індикації входи Г всіх індикаторів не-обхідно підключити до
розподілювача імпульсів. До складу розподілювача імпульсів входить: дешифратор,
регістр.
На кожний індикатор
інформація подається почергово з частотою 400 ГЦ.
Генератор вибираємо
такий же, що і в блоці клавіатури (дивись п. 3.3.3)
Також задаємось
значенням опіру резистора R1 = 10 МОм. Тоді ємність конденсатора С1 згідно
формули 3.10 розраховується.
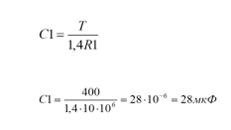
Значення конденсатора
повино знаходитись в діапазоні 300пФ… 100мкФ. Розрахована ємність знаходиться в
цьому діапазоні.
З довідника / 4 /
вибираємо типи резисторів та конденсатора.: МЛТ - 0,125 - 100кОм ± 5%: МЛТ -
0,125 - 1кОм ± 5%: КМ 5б - М470 - 28мкФ
Вибираємо лічильник
К1555ИЕ5. Так як необхідно керувати 6 індикаторами беремо в цій мікросхемі 3
розрядний лічильник ы використовуємо 2 мікросхеми.
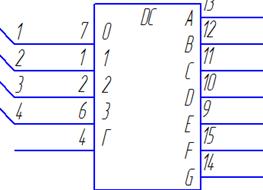
Дешифратор вибираємо
К555ИД7.
Так як індикатори
споживають струм не більше 75мА, а напруга живлення не більше 25В, вибираємо
транзистор типу КТ315А, який має такі параметри:
- максимальний
колекторний струм Ikmax=100мА
максимальна напруга на
переході КЕ Uкеmax=25В
максимальна споживана
потужність PКmax= 150 мВт
Резистор вибираємо 1кОм.
2.5 Інтерфейс зв’язку
ЕОМ
Паралельні інтерфейси
характеризуються тим, що в них для передачі біт у слові використовуються окремі
сигнальні лінії, і біти передаються одночасно. Паралельні інтерфейси
використовують логічні рівні ТТЛ (транзисторно-транзисторної логіки), що
обмежує довжину кабелю через невисоку перешкодозахищеність ТТЛ-інтерфейсу.
Гальванічна розв'язка відсутня. Паралельні інтерфейси використовують для
підключення принтерів. Передача даних може бути як односпрямованої (ІРПР), так
і двунаправленої (ІРПР). Іноді паралельний інтерфейс використовують для зв'язку
між двома комп'ютерами.
Поняття ІРПР ставиться
як до набору сигналів і протоколу взаємодії, так і до 36-контактного рознімання
на принтерах. Призначення сигналів наведене в табл. 1. Інтерфейс ІРПР
підтримується принтерами з паралельним інтерфейсом. Його вітчизняним аналогом є
інтерфейс ІРПР-М. Традиційний порт SPP (Standard Parallel Port) є
односпрямованим портом, через який програмно реалізується протокол обміну ІРПР.
Порт виробляє апаратне переривання по імпульсу на вході Ack#.
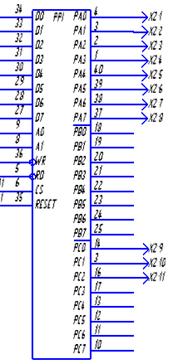
Для зв’язку з
інтерфейсом будемо використовувати КР580ВВ55.

Умовне графічне
позначення КР580ВВ55
Умовне графічне
позначення показано на рисунку 3.17.
Технічні характеристики
- Напруга живлення +5В
Споживана потужність
0,3Вт
Схемо технологія n - МОП
Паралельний інтерфейс
може працювати в трьох режимах. В завдані до курсового проекту заданий режим
роботи 0.
В режимі 0 інформація
передається через порти А, В і С. Таким чином в курсовому проекті необхідно
КР580ВВ55 підключити к сигналам інтерфейсу ІРПР.
Порт А підключаємо до
вхідних сигналів Data [0:7].
Порт С та порт В
використовуємо для передачі та прийому сигналів інтерфейсу:
- BUSYIN - РС0;
ACKNLGIN - РС1;
STROBEOUT - РС2;
STROBEIN - РС4;
BUSYOUT-РС5;
ACKNLGOUT - РС6.
В режимі 0 інформація
фіксується у внутрішніх регістрах.
Умовне графічне
позначення КР580ВВ55
2.6 Розробка блоку
керування об’єктами
Як об’єкти керування в
цьому курсовому проекті використовуються пристрої вводу та виводу графічної
інформації, які позначаються відповідно джерелом та приймачем інформації.
Опис блоку виводу даних
на графічний реєструючий пристрій
Пристрій виводу
графічної інформації виконаний у вигляді двокоординатного графічного
реєструючого пристрою (ГРП), наприклад, плоттера. ГРП має робоче поле, на якому
розміщається носій інформації (папір), обмежене координатами [0, Xmax],
[0, Ymax] і два виконуючих механізми ВМХ і ВМУ, за допомогою яких
здійснюється переміщення реєструючого органа (РО) в межах робочого поля.
Величина переміщення РО по кожній з координат задається контролером у вигляді
дискретного сигналу, що надходить від виконуючих механізмів лініями Хі
та Уj. Реєстрація точки з координатами Хі, Уj здійснюється
за сигналом WR, який формується контролером.
Розміри робочого поля
ГРП можуть бути, від 210х300мм до 420х600мм. Дозволяюча
спроможність реєструю чого органа змінюється від 0,1 до 0,5мм.
Nx=log2 ,у=log2
,у=log2 ,
,
де, Хmax, Ymax
- максимальна величина координат ГРП;
δх, δу - дозволяючи здатність ГРП за координатами Х, У.x=11
Ny=10
Контролер взаємодіє з
об’єктом керування через цифрові канали виводу інформації.
Канали цифрового вводу-виводу
реалізуються на підставі паралельного інтерфейсу КР580ВВ55 разом з відповідними
підсилювачами, які повинні забезпечувати потрібний рівень вхідних та вихідних
сигналів.
Умовне графічне
позначення показано на рисунку 3.19.
Технічні характеристики
Напруга живлення +5В
Споживана потужність
0,3Вт
Паралельний інтерфейс
може працювати в трьох режимах. В завдані до курсового проекту заданий режим
роботи 0. Розрядність даних при виведені інформації дорівнює 12.
Умовне
графічне позначення КР580ВВ55
В режимі 0 інформація
передається через порти А, В і С. Таким чином в курсовому проекті необхідно
використовувати дві мікросхеми КР580ВВ55 для кожної координати. Порти А та В
обох мікросхем будуть використані для виведення 12 - розрядних даних
В режимі 0 інформація
фіксується у внутрішніх регістрах. КР580ВВ55 програмується таким чином, щоб
спочатку до мікропроцесора надійшла інформація з порта А, а потім з порта В.
Опис пристрою вводу
графічної інформації (ПВГІ)
Опис пристрою вводу
графічної інформації (ПВГІ). Пристрій вводу графічної інформації виконаний у
вигляді планшета, на якому закріплюється оригінал графічного зображення.
Активне поле планшета обмежене координатами [0, Xmax], [0, Ymax].
Введення до контролера
координат кодового графічного примітива здійснюється знімачем типу «шина», який
може вільно переміщуватися в межах активного поля планшета. При цьому на
виходах Хі, Уj знімача безперервно формуються аналогові,
які відображають координати точок, в яких розміщається в цей час знімач.
Дозволяюча спроможність від 0,1мм до 0,5мм. Введення
координат кодової точки до контролеру здійснюється за допомогою сигналу RD,
сформованого на виході знімача після його розміщення у вибрану точку, а також
при наявності сигналу «Дозвіл вводу» від контролера.
Згідно завданню пристрій
введення графічної інформації - цифровий з наступними параметрами:
- максимальні величини
координат: Xmax = 210, Ymax = 300.
дозволяюча здатність δx = 0,25 мм.
Канал аналового вводу
графічної інформації реалізується на підставі АЦП, які повинні забезпечити
потрібну кількість аналогових каналів.
В зв’язку з тим, що
максимальне значення координат для ПВГІ та ГРП можуть різнитися, розрахунки
виконуються окремо для кожного пристрою.
Nx=log2 =11
=11
Ny=log2 =10
=10
З двох отриманих
результатів вибираємо більший. Таким чином розрядність паралельного коду
дорівнює 11.
Пристрій введення
інформації містить в своєму складі паралельний інтерфейс КР580ВВ55, який
запрограмовано на режим 0.
У режимі 0 за допомогою
КС = 10010001 лінії РА7… РА0 і РС3… РС0 налаштовується на введення, а лінії
РВ7… В70, РС7… С74 - на вивід. Обмін з МП здійснюється за ініціативою МП
зверненням до РА, РВ і РС. У режимі 0 можуть працювати всі три порти, причому порт
С розділяється на два незалежних 4-бітових порту. Виведені дані фіксуються в
регістрах цих портів, а дані, що вводяться не запам'ятовуються. Режим 0
застосовується в програмно-керованому введенні-виведенні з повільно діючими
периферійними пристроями.
2.7 Вибір схеми
переривань
Під час виконання
поточної (фонової) програми в комп`ютері виникають заздалегідь невідомі події,
які вимагають миттєвої реакції на них (аварія в системі, готовність ПП до
передачі даних, ділення на нуль та інші). Реакція полягає в перериванні фонової
програми, переході до підпрограми обслуговування даної події та поверненні
програми в попередній стан. Кожна подія, яка вимагає переривання,
супроводжується сигналом - запитом переривання. Переривання - важлива
архітектурна особливість машини, яка дозволяє ефективно організувати роботу
процесора за наявності декількох паралельних процесів.
Розглянемо коротко
систему переривань МП КР1821ВМ85. У даному МП є п'ять входів переривань. Після
одержання сигналу переривання по цьому вході МП уводить із шини даних вектор
переривання - команду, що виставляється пристроєм, що запросив переривання.
Звичайно це команда RST п, по якій здійснюється перехід програми до команди,
код якої зберігається в осередку з адресою. 8п (адреса, з якого здійснений
перехід, запам'ятовується в стеці).
У МП Кр1821ВМ85 є три
входи переривання RST п, сигнали на які відразу ініціюють перехід до команди,
що зберігається в комірці пам'яті з адресою 8п. Таким чином, при використанні
цих входів переривання немає необхідності в тім, щоб зовнішній пристрій
виставляв на шині даних потрібну команду. Адреси переходів для переривань по
входах RST 5.5, RST 6.5, RST 7.5 наступні: 002Сh, 0034h, 003Сh. Дані
переривання можуть маскуватися (забороняється) програмним способом командою SIM
(установка маски). Читання маски переривань виробляється по команді RIM.
Переривання по входу
TRAP - це немасковане переривання, по якому здійснюється перехід за адресою 24h
(таким чином, ця команда могла б бути названа RST 4.5). Переривання по цьому
вході звичайно виробляється при аварійній ситуації (наприклад, відключення
живлення), тому не передбачені команди, які могли б заборонити його обробку.
Якщо після приходу
сигналу одного з переривань до початку його обробки надійдуть також інші
сигнали переривань, то МП здійснить перехід, що відповідає старшому по
пріоритеті сигналу. Пріоритети при цьому розставлені в такий спосіб (у порядку
убування): TRAP, RST 7.5, RST 6.5, RST 5.5, INTR. Якщо ж обробка переривання
вже почалася, то вона може перерватися черговим не забороненим сигналом
переривання поза залежністю від його пріоритету. По входах RST 5.5, RST 6.5 і
INTR МП реагує на одиничний рівень сигналу, по входу RST 7.5 -5-на позитивний
фронт сигналу (у МП є внутрішній тригер, що спрацьовує по фронті), по входу
TRAP-І на одиничний рівень, і на позитивний фронт.
2.8 Розробка схеми
дешифратора пристроїв вводу-виводу
Розподіл адресного
простору вводу - виводу
|
А7
|
А6
|
А5
|
А4
|
А3
|
А2
|
А1
|
А0
|
Пристрої вводу - виводу
|
|
1
|
1
|
1
|
1
|
0
|
0
|
0
|
0
|
|
|
0
|
1
|
0
|
0
|
1
|
1
|
0
|
1
|
Дані молодший байт ГРПх
|
|
0
|
1
|
0
|
1
|
0
|
0
|
1
|
0
|
Дані старший байт ГРП х
|
|
0
|
1
|
0
|
1
|
0
|
0
|
0
|
0
|
Керуюче слово (КС) х
|
|
0
|
1
|
0
|
0
|
0
|
1
|
0
|
1
|
Дані молодший байт ГРПy
|
|
0
|
1
|
1
|
1
|
0
|
1
|
1
|
0
|
Дані старший байт ГРП y
|
|
0
|
1
|
1
|
1
|
1
|
1
|
0
|
0
|
Керуюче слово (КС) у
|
|
0
|
1
|
0
|
0
|
1
|
0
|
0
|
1
|
Порт А ПВГІ
|
|
0
|
1
|
0
|
0
|
1
|
0
|
0
|
1
|
Порт С ПВГІ
|
|
0
|
1
|
0
|
0
|
1
|
0
|
1
|
1
|
Керуюче слово (КС) ПВГІ
|
|
0
|
1
|
0
|
1
|
0
|
0
|
0
|
0
|
ІРПР
|
|
0
|
1
|
0
|
1
|
0
|
0
|
0
|
1
|
Керуюче слово (КС) ІРПР
|
|
0
|
1
|
0
|
1
|
0
|
0
|
1
|
0
|
Дані блоку клавіатури
|
|
0
|
1
|
0
|
1
|
0
|
0
|
0
|
0
|
Керуюче слово блоку клавіатури
|
|
0
|
1
|
0
|
1
|
0
|
1
|
0
|
1
|
Перший байт даних блоку індикації
|
|
0
|
1
|
0
|
1
|
0
|
1
|
0
|
1
|
Другий байт даних блоку індикації
|
|
0
|
1
|
0
|
1
|
0
|
1
|
1
|
1
|
Контролер переривань
|
|
|
|
|
|
|
|
|
|
|
|
|
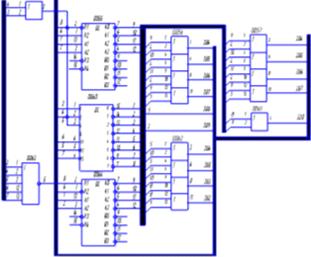
Схема дешифратора
пристроїв вводу-виводу
3. Розробка програмного
забезпечення
.1 Розробка програми
мікропроцесора
Необхідно написати
програму для використання функції
=2X1-3X2-X3.
Початкові дані:
- програма повинна
починатися з адреси 0800;
дані повинні
знаходитися: Х1 в регістрі С, Х2 в комірці пам’яті за адресою 0923, Х3 в
регістрі D;
- результат розміщується
в комірці пам’яті з адресою 0900.
При обчисленні функції Y
операцію множення представимо у вигляді операцій додавання та віднімання:
Y=X1+X1-X2-X2-X2-X3.
Програма мікропроцесору
|
Адреса
|
Код
|
Команда
|
Коментарі
|
|
0800
|
7AH
|
MOV AL, CX
|
(A)←X1
|
|
0801
|
82H
|
ADD CX
|
(A)←(A)+(D)=X1+X1
|
|
0802
|
11H
|
LXIHL, 0923
|
Пересилка в пару регістрів H і L
числа 0923
|
|
0803
|
23H
|
|
|
|
0804
|
09H
|
|
|
|
0805
|
96H
|
SUB M
|
(A)←(A) - (0923)=2X1-X2
|
|
0806
|
96H
|
SUB M
|
(A)=2X1-X2-X2
|
|
0807
|
96H
|
SUB M
|
(A)=2X1-X2-X2-X2
|
|
0808
|
91H
|
SUB D
|
(A)=2X1-3X2-X3
|
|
0809
|
32Н
|
STA 0900
|
Пересилка акумулятора в пам’ять з
адресою 0900
|
|
080А
|
00Н
|
|
|
|
080В
|
09
|
|
|
3.2 Розробка програми
для блоку воду - виводу
Розробка програми блоку
паралельного інтерфейсу
Оскільки в даному
курсовому проекті паралельнтй інтерфейс працює в режимі 1, то для
введення\виведення призначені порти А та В. Одже розрядність однієї мікросхеми
- 16.
Введення (24) - 1 мікросхема
порт А
мікросхема
Виведення (24) - 1
мікросхема порт В
Розподіл портів
інтерфейсу:
порт А - ввод 0-7, порт
В-ввод 8-15, порт А - вивод 0-7,
порт В-вивод 8-15, порт
А - ввод 16 - 23, порт В-вивод 16-23.
Програмування першої
мікросхеми
|
D7
|
D6
|
D5
|
D4
|
D3
|
D2
|
D1
|
D0
|
|
|
1
|
0
|
1
|
1
|
1
|
1
|
1
|
0
|
=ВЕ;
|
D7=1 - ознака керуючого
слова; D6=0, D5=1-ознака режиму 1; D4=1-порт А працює на введення; D3=1-порт С
працює на введення; D2=1-ознака режиму 1; D1=1-порт В працює на введення;
D0=0-порт С працює на виведення.
Програмування другої
мікросхеми
|
D7
|
D6
|
D5
|
D4
|
D3
|
D2
|
D1
|
D0
|
|
|
1
|
0
|
1
|
0
|
0
|
1
|
0
|
0
|
=А4;
|
D7=1 - ознака керуючого
слова; D6=0, D5=1-ознака режиму 1; D4=0-порт А працює на виведення; D3=0-порт С
працює на виведення; D2=1-ознака режиму 1; D1=0-порт В працює на виведення;
D0=0-порт С працює на виведення.
Програмування третьої
мікросхеми
|
D7
|
D6
|
D5
|
D4
|
D3
|
D2
|
D1
|
D0
|
|
|
1
|
0
|
1
|
1
|
0
|
1
|
0
|
0
|
=В4.
|
D7=1 - ознака керуючого
слова; D6=0, D5=1-ознака режиму 1; D4=1-порт А працює на введення; D3=0-порт С
працює на виведення; D2=1-ознака режиму 1; D1=0-порт В працює на виведення;
D0=0-порт С працює на виведення.
Значення розрядів D3 та
D0 у режимі роботи інтерфейсу не має значення.
Ініціалізація
паралельного інтерфейсу:
А0 - порт А1, А1 - порт
В1, А2 - порт С1, А3 - управляюче слово 1,
А4 - порт А2, А5 - порт
В2, А6 - порт С2, А7 - управляюче слово 2,
А8 - порт А3, А9 - порт
В3, АА - порт С3, АВ - управляюче слово 3.
Програма введення -
виведення має вигляд:A, A3, - занесення до А першого керуючогословаA3;A7, -
занесення до А другого керуючогословаA7;AB, - занесення до А третього
керуючогословаAB.
Розробка
програми контролеру переривань
Одна мікросхема ПКП може
приймати 8 запросів переривань, а в завданні до курсового проекту їх 20, то для
роботи нам потрібно використати 3 мікросхеми ПКП.
Визначення запитів
переривань
|
IRQ 0
|
0
|
IRQ 0
|
3
|
IRQ 0
|
11
|
|
IRQ 1
|
1
|
IRQ 1
|
4
|
IRQ 1
|
12
|
|
IRQ 2
|
2
|
IRQ 2
|
5
|
IRQ 2
|
13
|
|
IRQ 3
|
Ведений 1
|
IRQ 3
|
6
|
IRQ 3
|
14
|
|
IRQ 4
|
Ведений 2
|
IRQ 4
|
7
|
IRQ 4
|
15
|
|
IRQ 5
|
IRQ 5
|
8
|
IRQ 5
|
16
|
|
IRQ 6
|
20
|
IRQ 6
|
9
|
IRQ 6
|
17
|
|
IRQ 7
|
21
|
IRQ 7
|
10
|
IRQ 7
|
18
|
Перше керувальне слово
має вигляд:
|
D7
|
D6
|
D5
|
D4
|
D3
|
D2
|
D1
|
D0
|
|
|
0
|
0
|
1
|
1
|
0
|
0
|
0
|
0
|
= 30Н
|
Друге керувальне слово
має вигляд:
|
D7
|
D6
|
D5
|
D4
|
D3
|
D2
|
D1
|
D0
|
|
|
0
|
0
|
0
|
1
|
0
|
0
|
0
|
0
|
Ведучий
|
= 10 Н
|
|
0
|
0
|
1
|
0
|
0
|
0
|
0
|
0
|
Ведений 1
|
= 20 Н
|
|
0
|
0
|
1
|
1
|
0
|
0
|
0
|
0
|
Ведений 2
|
= 30 Н
|
Третє керувальне слово
має вигляд:
|
D7
|
D6
|
D5
|
D4
|
D3
|
D2
|
D1
|
D0
|
|
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
Ведучий
|
= FF Н
|
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
Ведений 1
|
= 03 Н
|
|
0
|
0
|
0
|
0
|
0
|
1
|
0
|
0
|
Ведений 2
|
= 04 Н
|
Четверте керувальне
слово має вигляд:
|
D7
|
D6
|
D5
|
D4
|
D3
|
D2
|
D1
|
D0
|
|
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
1
|
Ведучий
|
= 07 Н
|
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
Ведений 1
|
= 03 Н
|
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
Ведений 2
|
= 03 Н
|
Програма має такий
вигляд:
) MOV A, 17 H, 3) MOV
AL, FF,10H, OUT 21 H;A0, MOV AL, 03 H,A2; OUT A1;
) MOV AL, 10H, MOV AL,
O4 H,20H; OUT A3;AL, 20H, 4) MOV AL, O7H,A1; OUT 21H;AL, 30H, MOV AL, 03 H,A3;
OUT A1;
Висновок
МПС яка розроблена в
курсовому проекті складається з таких компонентів:
мікропроцесор
К1821ВМ85A;
блок ОЗП розроблений на
основі мікросхеми КР537РУ8А з організацією 16к*8;
блок ПЗП розроблений на
основі мікросхеми К556РТ14 з організацією 1к*1;
блок клавіатури, що має
14 клавіші та динамічний метод адресації;
4 індикаторів;
блок зв’язку ЕОМ.
Дана МПС повністю
задовольняє вимоги завдання до курсового проекту.
Список використаної
літератури
1. Мікропроцесори і мікропроцесорна техніка (Конспект лекцій) /
В.П. Малахов, Д.П. Яковлев, - Одеса: ОДПУ, 1998. - 78 с
. Проектирование микропроцессорной электронно-вычислительной
аппаратуры: Справочник / В.Г. Артюхов, А.А. Будняк, В.Ю. Лапий и др. - К.:
Техника, 1998. - 263 с
. Казаченко В.Ф. Резистори: Довідкова література. - М.:
Издательство ЭКОМ, 1997. - 688 с.: илл.
. Сташин В.В., Урусов А.В., Мологонцева О.Ф. Конденсаторы:
справочная литература. - М.: Энергоатомиздат, 1990. - 224 с.