Исследования системы автоматического управления в среде LabVIEW
ФЕДЕРАЛЬНОЕ
ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
"ТВЕРСКОЙ
ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ"
Курсовая
работа
По
дисциплине:
«Инструментальные
программные системы»
«Исследования
системы автоматического управления в среде LabVIEW»
Выполнил: студент
гр. УТС1301 Мякатин И.Д.
Тверь
2016
Содержание
Задание
1. Переходная и
импульсная характеристики объекта управления
. Передаточная
функция замкнутой системы. Начальное и конечное значение переходного процесса
3. Переходная
характеристика замкнутой системы
. Оценка качества
переходного процесса
. Частотные
характеристики объекта управления
. Сравнение
частотных характеристик объекта управления и замкнутой системы
. Оценка
устойчивости системы
Заключение
Список литературы
Задание
Задание на курсовую работу
1. Для заданного объекта
управления рассчитайте аналитически его переходную и импульсную характеристики.
Сравните полученный результат c расчетом, выполненным численным методом в
LabVIEW.
2. Вычислите передаточную
функцию замкнутой системы. С помощью теорем о начальном и конечном значении
оригинала определите начальное и конечное значение переходного процесса.
. Смоделируйте переходную
характеристику предложенной в курсовой работе замкнутой системы. Сравните
полученный результат с результатом, полученным в пункте 2.
. Оцените качество
переходного процесса замкнутой системы. Если качество переходного процесса Вас
не устраивает, то попытайтесь подобрать лучшие параметры регулятора.
. Рассчитайте аналитически
частотные характеристики объекта управления. Сравните полученный результат с
расчетом, выполненным численным методом в LabVIEW.
. Сравните частотные
характеристики объекта управления и замкнутой системы (c помощью одного прибора
и на одном осциллографе).
. Оцените численным методом
устойчивость замкнутой системы, используя для этого один из критериев
устойчивости (Гурвица, Найквиста, Михайлова - любой на выбор).
1. Переходная и импульсная
характеристики объекта управления
Переходная функция h(t) представляет
собой реакцию звена на единичное ступенчатое воздействие, а функция веса w(t)
на единичный импульс соответственно.
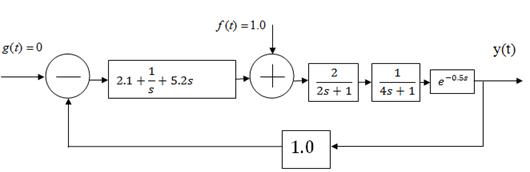
Объект управления представлен тремя
последовательно соединенными звеньями.
Первое и второе звено представляют
собой апериодическое звено первого порядка, дифференциальное уравнение которого
имеет вид:
(t)-входная величина, y(t)-выходная
величина, T-постоянная времени, k-коэффициент передачи.
В операторной форме
уравнение имеет следующий вид (при  ):
):

Откуда передаточная
функция звена:
Третье звено
представляет собой звено запаздывания, передаточная функция которого имеет
следующий вид:
τ-время
запаздывания.
Передаточная функция
объекта управления будет представлена произведением этих звеньев:

Так как звено
запаздывания не вызывает искажения выходной величины, а воспроизводит ее с
некоторым запаздыванием, при расчете переходной и весовой характеристики оно
учитываться не будет.
Переходную характеристику ОУ можно
найти, умножив передаточную функцию на единичное ступенчатое воздействие,
которое в операторной форме имеет вид 1/s:


Составим и решим систему уравнений:
Получаем:

Найдём оригиналы данных изображений
по таблице преобразований Лапласа:

Аналогично найдем импульсную
характеристику w(t):


Составим и решим систему уравнений:
Найдём оригиналы данных изображений
по таблице преобразований Лапласа:

Построим графики данных функций в
среде LabVIEWи сравним их с графиками, которые получаются в результате
построения при помощи встроенных операторов:
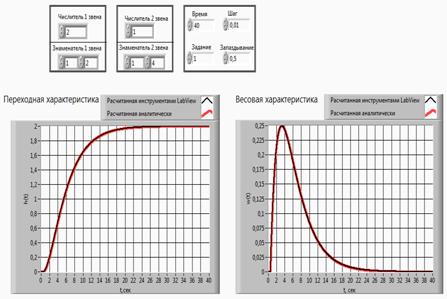
Рис. 1 Лицевая панель программы
«Переходная и импульсная характеристики объекта управления»
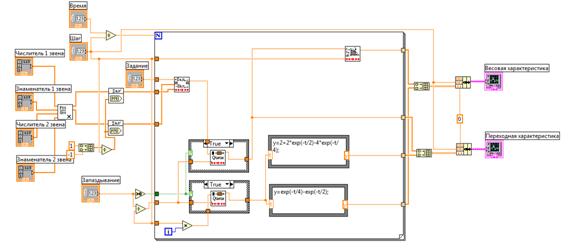
Рис. 2 Блок-диаграмма программы
«Переходная и импульсная характеристики объекта управления».
. Передаточная функция замкнутой
системы. Начальное и конечное значение переходного процесса

где Wo(s)-ПФ объекта, Wp(s)-ПФ
регулятора, Wf(p)- ПФ по возмущающему воздействию f(t).
В нашем случае задающее воздействие
g(t) отсутствует, поэтому передаточная функция будет выглядеть следующим
образом:

Теоремы о начальном и конечном
значении (предельные теоремы).
Поскольку данная система
представляет собой систему стабилизации, а задающее воздействие g(t)=0,
начальное и конечное значение переходного процесса будут равны 0 соответственно,
убедимся в этом с помощью предельных теорем:
Согласно теореме о конечном
значении:

При условии, что y(t) при t→∞
имеет конечное значение. Для единичного ступенчатого воздействия F(s) = 1/s, а
значит:
автоматическое управление замкнутая
система
Конечное значение переходного
процесса:

Начальное значение переходного
процесса:

3. Переходная характеристика
замкнутой системы
Составим программу в среде LabVIEW:
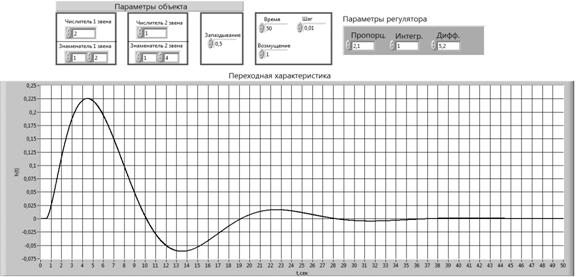
Рис. 3 Лицевая панель программы
«Переходная характеристика замкнутой системы»
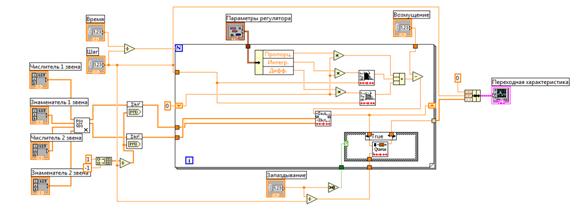
Рис.4 Блок-диаграмма программы
«Переходная характеристика замкнутой системы»
4.
Оценка качества переходного процесса
При помощи прямых оценок качества
оценим качество переходного процесса:
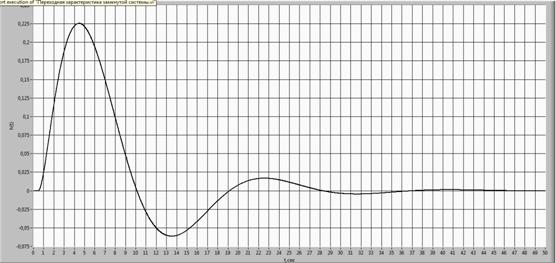
1) Yуст=0
2) Степень
затухания 
) Время
регулирования составляет 26 сек.
) Перерегулирование
Перерегулирование регулятор требует
перенастройки.
регулятор требует
перенастройки.
При увеличении
пропорциональной составляющей регулятора время переходного процесса и
перерегулирования уменьшаются, например:
При коэффициенте
пропорциональности К=3.1: tп.п=19 сек, 
5.
Частотные характеристики объекта управления
Амплитудно-частотная характеристика
(АЧХ) показывает, во сколько раз амплитуда синусоидального выходного сигнала
больше амплитуды сигнала на входе системы в зависимости от частоты.
Фазово-частотная характеристика
(ФЧХ) показывает изменение фазы выходного синусоидального сигнала в зависимости
от частоты синусоидального сигнала на входе.
АЧХ является четной функцией, а ФЧХ
- нечетной. Двумя названными частотными характеристиками описываются
установившиеся вынужденные колебания на выходе системы, вызванные гармоническим
воздействием на входе.
Найдём аналитически
частотные характеристики из передаточной функции с помощью формальной замены
комплексной переменной 

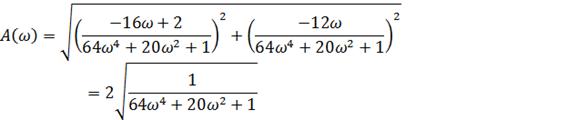
Звено запаздывания не оказывает
влияния на АЧХ, но вызывает сдвиг по фазе на величину ωτ:

Составим программу для отображения
частотных характеристик ОУ:
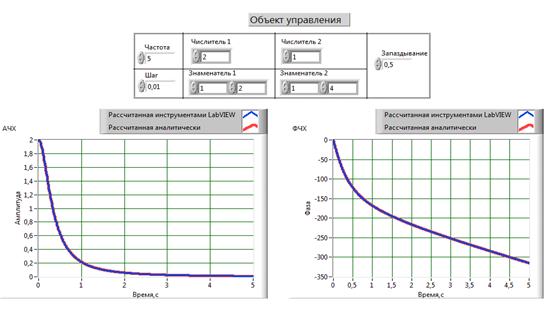
Рис.5 Лицевая панель программы
“Частотные характеристики ОУ”
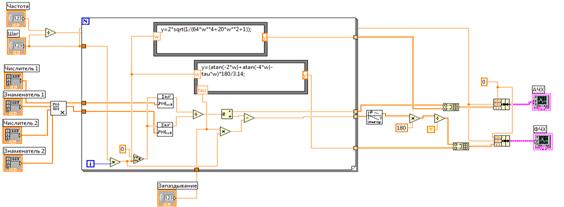
Рис.6 Блок-диаграмма программы
“Частотные характеристики ОУ”
. Сравнение частотных
характеристик ОУ и замкнутой САР
Составим программу для сравнения АЧХ
и ФЧХ объекта управления и замкнутой системы.
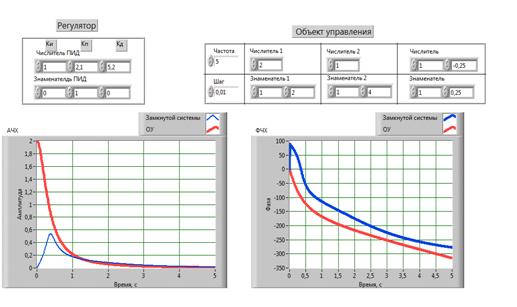
Рис.7 Лицевая панель программы
“Частотные характеристики замкнутой системы”
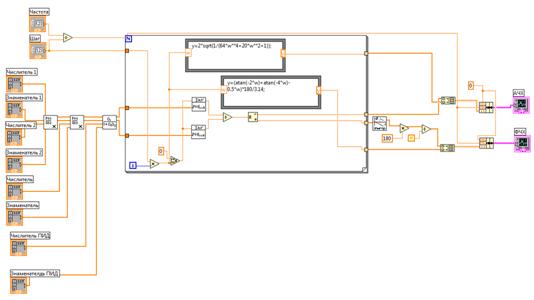
Рис.8 Блок-диаграмма программы
“Частотные характеристики замкнутой системы”
. Устойчивость замкнутой
системы.
Оценим устойчивость замкнутой
системы при помощи критерия устойчивости Найквиста. Критерий устойчивости
Найквиста позволяет судить об устойчивости замкнутой системы по АФЧХ
разомкнутой.
Составим программу для построения
годографа АФЧХ:
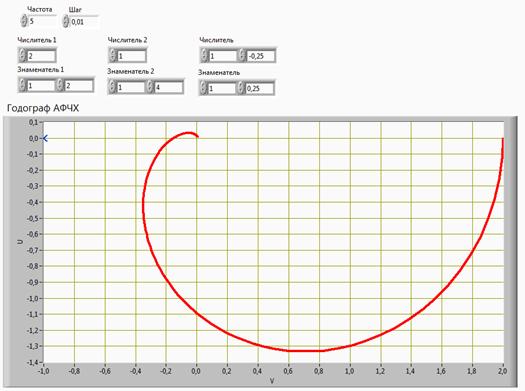
Рис.9 Лицевая панель программы
“Критерий устойчивости Найквиста”
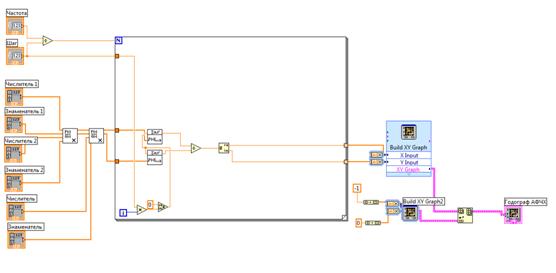
Рис.10 Блок-диаграмма программы
“Критерий устойчивости Найквиста”
Годограф АФЧХ не охватывает точку
(-1; 0j), => система устойчива.
Заключение
Объект включает в себя звено
запаздывания, из-за которого возникают трудности при расчете передаточной и
импульсной характеристики объекта, потому что ПФ этого звена является не
полиномом, а трансцендентной функцией с множеством решений. Так же звено
запаздывания негативно влияет на фазу и отрицательно сказывается на устойчивости
замкнутой системы. Тем не менее, при заданных параметрах регулятора и объекта
управления система остается устойчива. При составлении программы для построения
частотных характеристик удобно пользоваться разложением передаточной функции
звена транспортного запаздывания в ряд Боде.
Список литературы
1. LabVIEW для
изучающих теорию автоматического управления/ В.Г. Васильев; Тверь, 2012.
2. Д. Трэвис -
LabVIEW для всех.
. Суранов А.Я. -
«LabVIEW 7. Справочник по функциям»; Москва, 2005
. Теория
автоматического управления: Учеб. для вузов по спец. «Автоматика и
телемеханика». В 2-х ч. Ч. II. Теория нелинейных и специальных систем
автоматического управления. / А. А. Воронов, Д. П. Ким, В. М. Лохин и др.; Под
ред. А. А. Воронова.- 2-е изд., перераб. и доп. - М.: Высш. шк., 1986.- 504 с.