Разработка привода главного движения горизонтально-фрезерного станка
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
"Вологодский государственный университет"
ФПМиИТ
Кафедра ТОАП
КУРСОВОЙ ПРОЕКТ
Дисциплина: "Оборудование АМП"
Наименование темы: "Разработка привода главного движения
горизонтально-фрезерного станка"
Вологда 2015г.
Содержание
Введение
Исходные данные
. Выбор базовой модели станка
. Определение основных технических характеристик привода
.1 Структурная схема привода
.2 Определение диапазона регулирования
.3 Сетка частот вращения
.4 График частот вращения
. Кинематический расчет привода
.1 Определение передаточных отношений
.2 Определение чисел зубьев
.3 Кинематическая схема
. Проектный расчет
.1 Расчет мощности на валах
.2 Расчет диаметров валов
.3 Определение межосевых расстояний
.4 Расчет ременной передачи
. Разработка и компоновка привода
. Проверочный расчет
.1 Расчет вала на жесткость
.2 Проверочный расчет подшипников
.3 Проверка шпоночного соединения
.Система смазки привода
. Система управления приводом
Заключение
Список используемых источников
привод вал шпоночный передаточный
Введение
Современные металлорежущие станки -
это высокоразвитые машины, включающие механические, электрические, электронные,
гидравлические, пневматические и другие методы осуществления движением и
управления циклом.
По конструкции и назначению трудно
найти более разнообразные машины, чем металлорежущие станки. На них
обрабатывают всевозможные детали - от мельчайших элементов часов и приборов до
деталей, размеры которых достигают многих метров (турбины), прокатных станов.
На станках обрабатывают и простые цилиндрические, и поверхности, описываемые
сложными математическими уравнениями или заданные графически. При этом
достигаются высокая точность обработки, измеряемая нередко долями микрометра.
На станках обрабатывают детали из сталей и чугунов, из цветных, специальных
жаропрочных, мягких твердых и других материалов. Современное станкостроение
развивается быстрыми темпами. В решениях правительства по развитию станкостроения
особое внимание обращено на опережающее развитие выпуска станков с числовым
программным управлением, развитием производства тяжелых и уникальных станков.
Сверлильные станки предназначены для
сверления глухих и сквозных отверстий, рассверливания, зенкерования,
развертывания, растачивания и нарезания резьбы. Сверлильные станки
подразделяются на вертикально-сверлильные настольные и наклонные,
радиально-сверлильные, для глубокого сверления, центровальные и
многошпиндельные.
Исходные данные
Разработать привод главного движения
вертикально сверлильного станка при следующих условиях:
вид привода: безраздельный
знаменатель геометрического ряда
частоты вращения шпинделя : φ=1.26;
число ступеней частот вращения
шпинделя: z=12;
минимальное частота оборотов
шпинделя: nmin=25об/мин;
эффективная мощность резания: Nэ=3кВт.
1. Выбор базовой модели станка
Вертикально-сверлильный станок
2А150.
Техническая характеристика
. Рабочая поверхность стола, мм
500х560
. Наибольшее вертикальное
перемещение
сверлильной головки, мм 500
стола, мм 360
. Число частот вращения шпинделя 12
. Частота вращения шпинделя, об/мин
22-1000
. Мощность электродвигателя
шпинделя, кВт 7
.Габаритные размеры станка ,мм
1355х890х2930
2. Определение
технических характеристик привода
Главными приводами со ступенчатым
регулированием частоты вращения шпинделя оснащают автоматизированные редко
переналаживаемые станки, работающие в массовом производстве, и
неавтоматизированные станки с ручным управлением. Такие приводы просты,
компактны, имеют высокий КПД, долговечны.
.1 Структурная схема
привода
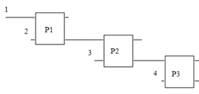
Рис 2.1- Структурная схема привода
Структурная формула:
Z=P1*P2*P3 ; (1)
=3*2*2
Зная знаменатель геометрического
ряда φ=1.26 и минимальную частоту
вращения шпиндельного вала, выписывает ряд частот вращения шпинделя n1 - n12
Частоты вращения шпинделя n1 = nmin, n2, n3, ... , nz = nmax образуют отрезок геометрического ряда со знаменателем φ. Число ступеней частот
- Z.
Основные зависимости геометрического
ряда, члены ряда:
n1; n2 = n1·φ, n3 = n1·φ2,..., nz =n1·φZ-1
n1=25 об/мин;
n2=31.5 об/мин;
n3=40 об/мин;
n4=50 об/мин;
n5=63 об/мин;
n6=80 об/мин;
n7=100 об/мин;
n8=125 об/мин;
n9=160об/мин;
n10=200 об/мин;
n11=250 об/мин;
n12=315об/мин;
2.2 Определение
диапазона регулирования
Диапазон регулирования частот
вращения шпиндельного вала коробки скоростей определяется по формуле :

Где nmax - максимальная
частота вращения вала коробки скоростей;
nmin - минимальная частота вращения вала коробки скоростей.
Таким образом получаем диапазон
регулирования :

2.3 Сетка частот
вращения
Сложенную структуру получают из двух
или более определенным образом соединенных структур с последовательно
включенными групповыми передачами. Одна из соединяемых структур называется
основной, другие - дополнительными. Основная структура участвует в передаче на
шпиндель всех ступеней частоты вращения, каждая дополнительная используется для
передачи только части ступеней.
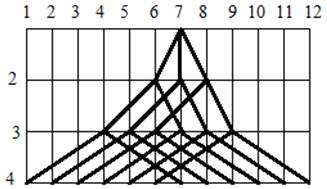
Рис 2.3 - Структурная сетка
2.4 График частот
вращения
По данным полученным со структурной
сетки строим график частот вращения
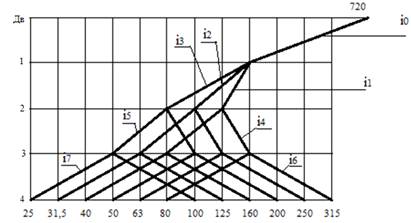
Рис 2.4 - График чисел оборотов
Выбираем двигатель асинхронный: 4A132S8Y3 Nэд=4 кВт;
n=720 об/мин;
Ток статора при напряжении 380В:
10.6 А;
КПД : 83%;
cosφ=0.7;
Iп/Iн=5.5;
Мп/Мн=1.9;
Мmin/Мп=1.7;
Мmax/Мн=2.6;
Маховый момент ротора : 1.7 Н∙м2.
3. Кинематический расчет
привода
Исходными данными для
кинематического расчета главного привода являются частота вращения вала
электродвигателя, минимальная частота вращения шпинделя nmin, максимальная
частота nmax, число ступеней частот z или другие эквивалентные комплексы данных.
.1 Определение
передаточных отношений
Передаточное отношение определяем по
графику частот вращения
i1=φ-1=0,793 i5=φ-2=0,6292=φ-2=0,629 i6=φ3=23=φ-3=0,499 i7=φ-3=0,4994=φ1=1,26
imax*imin=2*0.499≈1
.2 Определение чисел
зубьев
P1 : u1 =1,26;
u2 = 1,58; u3 = 2;
∑z = 54
i1: Z1=24
Z2=302: Z1=21 Z2=333: Z1=18
Z2=362 : u4 =1,26; u5 = 1,58;
∑z =524:Z1=29
Z2=235:Z1=20 Z2=32
∑z =512
: u6 =2; u7 = 2;6:Z1=34 Z2=177:Z1=17 Z2=34
3.3 Кинематическая схема
После определения чисел зубьев
строим кинематическую схему.
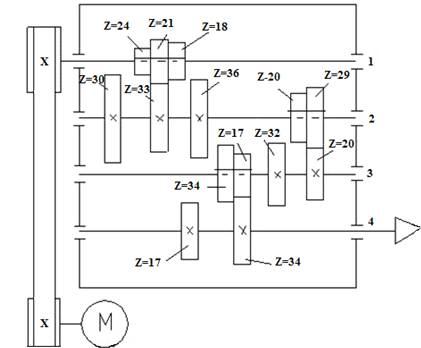
Рис 3.3 - Кинематическая схема
4. Проектировочный
расчет
Проектные расчеты выполняются для
разработки компоновочной схемы привода. В курсовом проекте определяются
основные параметры проектируемого узла и его деталей.
.1 Расчет мощности на
валах
Общий КПД механизма коробки
скоростей находим по формуле:

Где ηрп - КПД ременной передачи,
ηрп=0.98;
ηзп - КПД пары прямозубых
цилиндрических колес, ηзп=0.99;
ηп - КПД подшипника
качения , ηп=0.9985;
a, b - количество зубчатых передач и подшипников в кинематической
цепи, a=7, b=8.
η=0.98∙0.997∙0.99858=0.90
Максимальную мощность на валах
коробки скоростей определяем исходя из мощности электродвигателя. Мощность на
валах определяется по формуле:
Ni∙=Ni-1∙η (4)
где Ni-1 - мощность на предыдущем валу, кВт;
η - КПД.
N1=Nдв∙ηрп∙η2п=3.9 кВт;
N2=3.85 кВт;
N4=3.75 кВт;
Определение крутящего момента на
валах:
4.2 Расчет диаметров
валов
Минимально необходимый диаметр вала
определяем по формуле:

где Ti - крутящий момент
на валу;
[τ] - допускаемое
напряжение при кручении;
dдв≥0.0537 м
dI≥0.0541 м
dII≥0.0557 мм
dIII≥0.0562мм
dIV≥0.0569мм
Так как минимально допустимые
размеры валов приблизительно равны, то принимаем размер всех валов 55 мм.
4.3 Определение
межосевых расстояний
Межосевое расстояние из условия
контактной прочности определяем по уравнению:

где Ка -
коэффициент для прямозубых колес, принимается Ка =49,5 МПа1/3;
ψba - коэффициент ширины yba= bw/aw, его можно принимать в пределах 0,25...0,4
для неподвижных колес и 0,1...0,2 - для передвижных колес коробок скоростей;
КНβ - коэффициент концентрации нагрузки;
[σH] - Допускаемое
контактное напряжение для прямозубой передачи.
Допускаемое контактное напряжение [σH] для прямозубой передачи считается по формуле:

где σH lim b - предел контактной выносливости;
КHL - коэффициент
долговечности, КHL = 1,1…1,8;
[SH] - коэффициент
безопасности, [SH] = 1,1¸1,2;
Расчетный модуль:

1=4; m2=4; m3=5
Фактическое значение модуля выбирают
из стандартных значений путем округления до ближайшего большего значения.
Уточненное межосевое расстояние между
валами :

w I-II=108; aw II-III=104; aw III-IV=128
Определение основных геометрических
параметров зубчатых колес:
Делительный диаметр, мм
d=m∙Z (11)
Диаметр окружности вершин, мм
dа=d+2m (12)
Диаметр окружности впадин, мм
df=d-2,5m (13)
Ширина зубчатого венца, мм
вр=(6..8)m (14)
в= вр+4мм (15)
Расчеты сводим в таблицу 4.
Таблица 4 Основные геометрические
параметры зубчатых колес
|
Число зубьев
|
Модуль m, мм
|
d, мм
|
da, мм
|
df, мм
|
в, мм
|
|
Z1=24 Z2=30
Z3=21 Z4=33 Z5=18 Z6=36
|
4
|
96 120 84 132 72 144
|
104 128 92 140 80 152
|
86 110 74 122 62 134
|
28
|
|
Z7=29 Z8=23
Z9=20 Z10=32
|
4
|
116 92 80 128
|
124 100 88 136
|
106 82 70 118
|
28
|
|
Z11=34 Z12=17
Z13=17 Z14=34
|
5
|
170 85 85 170
|
180 95 95 180
|
157,5 72,5 72,5 157,5
|
4.4 Расчет ременной
передачи
Ременные передачи находят применение
лишь в приводах главного движения станков. В приводах подач эти передачи не
находят применения, так как не обеспечивают высокой точности передачи движения.
В металлорежущих станках применяются
плоскоременные и клиноременные передачи, реже применяются передачи с зубчатыми
ремнями.
Окружные скорости на шкивах
определяют по формулам:
 , м/с,
(16)
, м/с,
(16)
где υ1 и υ 2 -
окружные скорости на ведущем и ведомом шкивах;
d1 и d2 - диаметры ведущего и
ведомого шкивов, мм;
n1 и n2 - частоты вращения ведущего и ведомого шкивов, об/мин.
В ременных передачах имеет место
упругое скольжение, поэтому окружную скорость ведомого вала определяют по
формуле:
 , м/с,
(17)
, м/с,
(17)
где x - коэффициент упругого
скольжения.
Передаточное число передачи
определяется по формуле:
 ; (18)
; (18)
Диаметр ведущего шкива клиноременной
передачи определяется по формуле:
 , мм
(19)
, мм
(19)
где С - коэффициент
пропорциональности;
Т1 - вращающий момент на
ведущем шкиве, Н×м.
Окружные скорости на шкивах: υ1=5,27 м/c ; υ 2=5,16 м/c
Межосевое расстояние aw предварительно
вычисляют по формулам:
awmin = 0,55×(d1
+ d2) + T0, мм (20)
где T0 - высота ремня, мм.
awmax = 2×(d1 + d2), мм (21)
Межосевое расстояние выбирается
предварительно в диапазоне между awmin и awmax .
Выбираем сечение ремня В(Б), T0=10,5.
awmin =0,55(125+180) +10,5= 434 мм;
awmax = 2×(125 +
180)=1540 мм;
aw= {434..1540}
aw=800 мм
Длина ремня :
Lp=2×aw + 0,5·×π·(d1+d2)+( d2- d1)2/(4×aw). (22)
Расчетная длина ремня округляется до
большей предпочтительной длины: Lp=3150 мм
Уточняем межосевое расстояние :
 (23)
(23)
aw=1048 мм
Угол обхвата в ременной передаче с
двумя шкивами определяется по формуле:
 , (24)
, (24)
α1=208, для d1
α2=152, для d2
Проектный расчет ременной передачи
выполняется по допустимой мощности, передаваемой одним ремнем.
Nр = N0×Cα×CL×Cu×Cp, кВт, (25)
где N0 - номинальная мощность
передачи с одним ремнем, 2.18 кВт;
CL-коэффициент, учитывающий длину ремня;
Ca - коэффициент угла обхвата, Ca = 1.12;
Cu - коэффициент
передаточного отношения, CU = 1.14;
Ср - коэффициент
динамичности нагрузки и режима работы, СP = 1
 , (26)
, (26)
где Lр0 - базовая длина клинового
ремня, CL=1.1, Nр =3
Число ремней z в передаче для обеспечения среднего ресурса эксплуатации
определяют по формуле:
 (27)
(27)
где Р1 -
передаваемая мощность на ведущем валу, кВт.
Z=4.229 Округляем до целого Z=5
5. Разработка и
компоновка привода
На основании полученных расчетов,
которые приближенно равны значениям, указанным в паспорте станка 2A150, используем следующие значения :
Корпус коробки представляет собой
чугунную отливку. Толщина стенки отливки δ=15мм. Зазор между торцами цилиндрических зубчатых колес и внутренней
стенкой корпуса a=(1.0 - 1.2)δ=15мм.
Расстояние от наибольшего зубчатого
колеса до дна коробки b=50 мм.
Минимальное расстояние между венцами
блока 6мм. Зазор между торцами венцов 1-3 мм.
Длина ступицы зубчатых колес lст=(1.2-1.5) dв
Диаметр ступицы dст=1.6 dв
C целью уменьшения веса, инерционных сил и экономии металла, колеса
выполняются с выточками. Толщина тела венца δ
=(2.5-21) ms, c=(1-1.2) δ.
Для герметизации подшипниковых узлов
выбираем крышки торцевые глухие (ГОСТ 18511-73) и крышки с отверстием (ГОСТ
18515-73).
Для уплотнения валов применяем
резиновые армированные манжеты ГОСТ 8752-79.
Размеры шлицевых прямоточных соединений
(8х27х30).
Предварительный выбор подшипников
качения:
Выбираем шарикоподшипники радиальные
однорядные легкой серии ГОСТ 8338-75. 206: D=62мм, B=16мм, d=30мм.
6. Проверочный расчет
Предварительная проработка
конструкции валов и подшипниковых узлов выполняется на стадии эскизного проекта
привода.
.1 Расчет вала на
жесткость
Рис.6.1 - Общий вид вала
Крутящий момент, передаваемый валом:
Tкр=722.43 Нм
Усилие в зацеплении:
опорное : P3-4=2Ткр/d=2∙722.43/ 55∙105=657.44 Н; (28)
P7-8=2Mкр/d= 2∙20,4/55∙105=1043.12 H; (29)
распорное : Т3-4=P3-4∙tgα=231 Н; (30)
Т7-8=P7-8∙tgα=372.44 H
Определение опорных реакций:
вертикальная плоскость:
∑МА=0 ; - P3-4∙cos45∙0.73- P7-8∙2.48+B∙3.11=0
∑МB=0 ; -A∙3.11+- P3-4∙cos45+ P7-8∙0.63=0
горизонтальная плоскость:
∑МА=0 ; - Т3-4∙cos45- Т7-8∙2.48+
B∙3.11=0
∑МB=0 ; -A∙3.11+- Т3-4∙cos45+ Т7-8∙0.63=0
где A и B реакции опор; A=560.6H; B=910.96H;
- изгибающий момент в горизонтальной
плоскости:
My1=243.21 Н∙м; Mx1=400.76 Н∙м;
изгибающий момент в вертикальной
плоскости:
My2=248.21 Н∙м; Mx2=196.78 Н∙м;
-результирующий изгибающий момент:
М1 =  = 468.78 Н·м. (31)
= 468.78 Н·м. (31)
М2 =  = 316.75 Н·м. (32)
= 316.75 Н·м. (32)
Эквивалентные моменты:
Мэкв1 =  = 452.39 Н·м. (33)
= 452.39 Н·м. (33)
Мэкв2 = = 341.37 Н·м. (34)
Определение диаметра вала:
Принимаем допустимое напряжение [σ-1]=60МПа.
 (35)
(35)
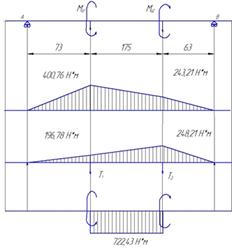
Рис.6.1 - Эпюры изгибающих и
крутящих моментов
Вывод: вал подобран правильно, так
как условия по жесткости и прогибу соблюдаются.
6.2 Проверочный расчет
подшипников
Подшипники, как правило, подбираются
по таблицам ГОСТ на основании условного расчета, состоящего в определении
динамической грузоподъемности по методике ГОСТ 18854-79 и ГОСТ 18855-73.
Основные критерии работоспособности
подшипника качения - его динамическая и статическая грузоподъемность. На
основании многочисленных опытов установлена зависимость между динамической
приведенной нагрузкой Q подшипника, его номинальной долговечностью α, выраженной в миллионах
оборотов вращающегося колеса n и динамической грузоподъемностью С(кгс)
 (36)
(36)
где Q = R∙Kб∙Kт∙Kn; (37)
R - радиальная нагрузка, R=908,8;
Kб=1.1 - коэффициент
безопасности;
Kn=1 - коэффициент вращения;
Kт=1 - температурный
коэффициент.
Q = 908.8∙1.1∙1∙1=999.68 кгс, С=10623.28
В результате расчета, полученное
значение удовлетворяет условию минимальной долговечности подшипников. Выбираем
подшипники 206 легкой серии.
6.3 Проверка шпоночного
соединения
Размеры шпонок выбираются в
зависимости от принятого диаметра вала по ГОСТ, а затем производится условный
расчет на смятие, чтобы напряжение на узких рабочих гранях шпонки
распределялось равномерно. Условие прочности:
 (38)
(38)
где Мкр - крутящий
момент; d - диаметр вала; h - высота сечения шпонки; lp - рабочая длина
шпонки; σсм≤ [σ]см ; [σ]см=400…420 МПа.
σсм=407.51 МПа
Условие прочности выполняется с
запасом, значит, прочность шпоночного соединения обеспечена.
7. Система смазки
привода
Основное назначения системы смазки
коробки скоростей и коробки подач сводится к уменьшению потерь мощности на
трение, сохранению точности работы, предотвращению вибрации, снижению
интенсивности износа трущихся поверхностей, а также к предохранению их от
заедания, задирав и коррозии. Масло, применяемое для смазки, должно быть
чистым, бес кислотным, не должно содержать воды и твердых частиц. Рекомендуется
употреблять индустриальное масло марки "20" (Веретеное
"3"), ГОСТ 1707-51. Механизмы коробки скоростей смазываются от
специального насоса, подающего масло из масляного резервуара в подставке
коробки скоростей. При работе станка масло, подаваемое насосом, разбрызгивается
зубчатыми колесами на все рабочие поверхности коробки скоростей.
8. Система управления
приводом
Главным движение в станке является
вращение шпинделя, которое он получает от электродвигателя через клиноременную
передачу и коробку скоростей. Вращение шпинделя, с определённой частотой
вращения, осуществляется за счёт переключения блоков зубчатых колёс при помощи
двух рычагов. Осуществляется принцип управления с предварительным набором
скоростей (преселективная система). Первый рычаг осуществляет передвижении
первого блока колёс, второй рычаг - двух остальных. Исходя из этого, первый
рычаг имеет три положения, второй четыре. И что бы получить необходимую частоту
вращения шпинделя необходимо поставить рычаги в определённое положение.

Рис 8 - Система управления приводом
Заключение
В ходе выполнения курсового проекта
мною был спроектирован привод главного движения с электродвигателем мощностью N=4 кВт
Частота вращения выходного вала:
nmin=25 об/мин
nmax=317 об/мин
Мощность на выходном валу 3 кВт
Cпроектированная коробка передач работоспособна.
Чертеж коробки передач см. в
приложении
Список используемых
источников
1. Б. А. Шкарин, В.В. Яхричев. Оборудование автоматизированного
машиностроительного производства. Учебное пособие к выполнению курсового
проекта. . - Вологда: ВоГТУ, 2014. - 92с.
.Универсальный вертикально сверлильный станок модели
2А150.Описание и руководство по обслуживанию.- Москва:Станкостроительный завод
имени Ленина, 1960. -30c.
. Универсальный вертикально сверлильный станок модели
2А125.Москва: Станкостроительный завод имени Ленина, 1955. -48c.
. 2А135, 2А150 Станок вертикально-сверлильный универсальный.
Описание, характеристики, схемы [Электронный ресурс]: офиц. сайт. - Режим доступа
http://stanki-katalog.ru Дата последнего
посещения 07.06.2015