|
in
|
№ колеса
|
z
|
m, мм
|
d, мм
|
da, мм
|
df, мм
|
aw, мм
|
|
i1
|
3
|
50
|
2
|
100
|
104
|
95
|
100
|
|
4
|
50
|
|
100
|
104
|
95
|
|
|
i2
|
5
|
47
|
|
94
|
98
|
89
|
|
|
6
|
53
|
|
106
|
110
|
101
|
|
|
i3
|
7
|
44
|
|
88
|
92
|
83
|
|
|
8
|
56
|
|
112
|
116
|
107
|
|
|
i4
|
9
|
42
|
|
84
|
88
|
79
|
|
|
10
|
58
|
|
116
|
120
|
111
|
|
|
i5
|
11
|
57
|
2.5
|
142.5
|
147.5
|
136.25
|
127.5
|
|
12
|
45
|
|
112.5
|
117.5
|
106.25
|
|
|
i6
|
13
|
34
|
|
85
|
90
|
78.75
|
|
|
14
|
68
|
|
170
|
175
|
163.75
|
|
|
i7
|
15
|
50
|
3
|
150
|
156
|
142.5
|
150
|
|
16
|
50
|
|
150
|
156
|
142.5
|
|
|
i8
|
17
|
39
|
|
117
|
123
|
109.5
|
|
|
18
|
61
|
|
183
|
189
|
175.5
|
|
Степень точности колес определяется
в зависимости от назначения. Принимаем степень точности 7. Материал колёс -
сталь 20Х.
4.2 Расчет диаметров
валов
Диаметр вала определяется из условия
прочности на кручение при пониженных допускаемых напряжениях:
 , где
, где
T
- крутящий момент;
 - допускаемое условное
напряжение на кручение.
- допускаемое условное
напряжение на кручение.
 для промежуточных
валов:
для промежуточных
валов:
 для входного и
выходного валов.
для входного и
выходного валов.
Тогда
 , принимаем
, принимаем  ;
;
 , принимаем
, принимаем  ;
;
 , принимаем
, принимаем  ;
;
 , принимаем
, принимаем  ;
;
Для 5-го вала - шпинделя
ориентировочно минимальный необходимый для передачи мощности диаметр шейки
шпинделя под передней опорой для токарных станков составляет:

Принимаем диаметр вала
под передней опорой 62 мм.
4.3 Расчет зубчатой
ременной передачи
Конструкция ремня показана на
рисунке 5.
Рисунок 5 - Конструкции ремня и
шкива
Определяем момент на быстроходном
валу:


По табл. 8.19 [8]
принимаем  .
.
По табл. 8.20 [8]
принимаем число зубьев меньшего шкива  , тогда число зубьев
большего шкива
, тогда число зубьев
большего шкива
 ,
,
где  .
.
Расчетные диаметры
шкивов:

Наружные диметры шкивов:
 ;
;
 .
.
Внутренние диметры
шкивов:
 ;
;
 .
.
Определяем межосевое
расстояние:
 .
.
Принимаем  .
.
Определяем длину ремня:

Число зубьев ремня:
 ; Принимаем
; Принимаем  (табл.
8.19 [8])
(табл.
8.19 [8])
Окончательная длина
ремня:
 ;
;
Определяем межосевое
расстояние по окончательной принятой длине ремня:
Определяем половину угла
схождения ветвей:
 ;
;
Угол обхвата:

Определяем число зубьев
ремня, находящегося в зацеплении:
Условие  соблюдается.
соблюдается.
Определяем допускаемую
окружную силу при заданных условиях работы:
 . По табл. 8.19 [8]
принимаем
. По табл. 8.19 [8]
принимаем  .
По табл. 8.7 [8] принимаем
.
По табл. 8.7 [8] принимаем  . Поскольку передача
понижающая, то
. Поскольку передача
понижающая, то  .
При принимаем
.
При принимаем
 .
Вводим один натяжной ролик, поэтому
.
Вводим один натяжной ролик, поэтому  . Таким образом,
. Таким образом,

Окружная сила:

где  -
скорость ремня.
-
скорость ремня.
Определяем ширину ремня:
где  (табл.
8.19, п. 4 [8]).
(табл.
8.19, п. 4 [8]).
Принимаем при мм
 мм
(табл. 8.19, п. 5 [8]). Условие
мм
(табл. 8.19, п. 5 [8]). Условие  выполняется.
выполняется.
Ширина шкива без бортов
(табл. 8.20, п. 8 [8]):

Сила, действующая на
валы передачи:

Предварительное
натяжение ремня для устранения зазоров в зацеплении:

При межосевом расстоянии
 ,
где
,
где  диаметр
меньшего шкива и
диаметр
меньшего шкива и  оба
шкива выполняют с ребордами высотой 1,5…4 мм. При меньших а реборды
выполняются на одном из шкивов, чаще меньшем. Реборды предотвращают осевое
сползание ремня. В нашем случае
оба
шкива выполняют с ребордами высотой 1,5…4 мм. При меньших а реборды
выполняются на одном из шкивов, чаще меньшем. Реборды предотвращают осевое
сползание ремня. В нашем случае  выполняем реборд только
на одном шкиве, меньшем.
выполняем реборд только
на одном шкиве, меньшем.
5. Выбор конструкции
шпинделя и его расчет
5.1 Конструктивная схема
шпиндельного узла
В соответствии с
рекомендациями, приведенными в литературе [6] принимаем следующую компоновку
шпиндельного узла.

Рисунок 6 -
Конструктивная схема шпиндельного узла токарного станка
5.2 Проверочный расчет
подшипников
Критерием подбора
подшипников служит неравенство:
 ,
,
где  -
требуемая величина динамической грузоподъемности;
-
требуемая величина динамической грузоподъемности;
 - табличные значения
динамической грузоподъемности выбранного подшипника.
- табличные значения
динамической грузоподъемности выбранного подшипника.
Требуемая величина
динамической грузоподъемность:
 ,
,
где Р -
приведенная нагрузка на подшипник;
n
- частота вращения подшипника (n
= 200 мин-1);
Lh
- долговечность подшипника (принимается для шпинделей станков 10000 часов);
Составляем расчетную
схему (рисунок 7).
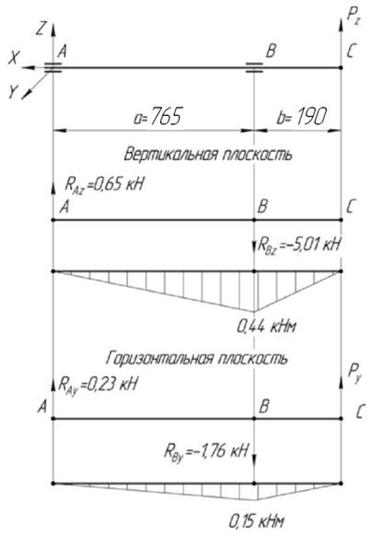
Рисунок 7 - Схема
расчета приведенной нагрузки действующей на подшипники шпинделя
Тогда, реакция в опорах А, В равна
сумме реакций возникающих в горизонтальной и вертикальной плоскостях:
 кН
кН
 кН
кН
Расчетная нагрузка Q:
 кН;
кН;
Тогда  кН
кН
Для радиального
двухрядного роликоподшипника с короткими цилиндрическими роликами серии
33182113К,  ;
;
 т.е. подшипник
работоспособен.
т.е. подшипник
работоспособен.
5.3 Расчет шпинделя на
жесткость
Составляем расчетную схему (рисунок
8). При двух шариковых подшипниках качения расчетная схема принимает вид:
Рисунок 8 - Расчетная схема
жесткости шпинделя
Перемещение переднего конца шпинделя
с учетом защемляющего момента (cтр. 180, [3]):
где Р - сила
резания;
l
= 0,765 м - расстояние между опорами;
а =
0,190 м - вылет шпинделя;
J1
- среднее значение момента инерции сечения консоли;
J2
- среднее значение момента инерции сечения шпинделя между опорами;
 м;
м;
 м.
м.
Е
- модуль упругости материала шпинделя: Е = 2,1´1011
Па;
jA
и jB - радиальная жесткость задней и
передней опор,  =0,7
кН/мкм;
=0,7
кН/мкм;  =0,9
кН/мкм;
=0,9
кН/мкм;
G =79,3 ГПа - модуль сдвига материала шпинделя;
 - коэффициент
защемления;
- коэффициент
защемления;
S1=3,3·10-3
и S2=1,9·10-3 - площади сечения переднего конца
и межопорной части шпинделя, м2;

Согласно данным (стр.
136 [3]) допустимая минимальная жесткость конца шпинделя для продукционных
станков составляет 200 Н/мкм.
Фактическая жесткость переднего
конца шпинделя
 Н/мкм > 200 Н/мкм,
Н/мкм > 200 Н/мкм,
т.е. жесткость шпинделя
обеспечена.
6. Расчет усилий на
органах управления
Изменение частоты вращения шпинделя
осуществляется введением в зацепление различных пар зубчатых колес. Механизм
управления предназначен для включения требуемой частоты вращения шпинделя,
получаемой в результате определённого взаимного расположения в зацепления зубчатых
колёс.
При перемещении колес возникают
различного рода силы сопротивления (силы трения блоков зубчатых колес при
переключении и деталей механизма управления, перекосы осей, колёс и т.д.).
Требуется определить эти силы и рассчитать длину рукоятки механизма
переключения с учетом того, что бы силы, приложенная к ней, не превышала 40 Н.
Исходные данные для проектирования
механизма управления получаем из чертежа развертки коробки скоростей. Путем
замера получаем: ход двойного первого блока первой группы 40 мм, ход двойного
блока второй группы 65 мм, ход двойного блока третьей группы 56 мм.
Для переключения подач применяем
механизм централизованного последовательного управления с барабанными
кулачками, в котором переключение шестерен осуществляется при помощи переводных
вилок.
К основным расчетно-конструктивным
параметрам барабанных и плоских кулачков относятся
диаметр кулачка D;
величина подъема профиля H;
размеры паза, определяемые размерами
ролика dp и b;
угол подъема профиля Θ.
Непосредственно с кулачком 1, а
точнее, криволинейным пазом на его поверхности, взаимодействует ролик 2,
вращающийся на оси 3, которая крепится к хвостовику переводной вилки или концу
переводного рычага 4.
Рисунок 6.1 - Основные
конструктивные параметры барабанного кулачка
Величина подъема профиля кривой на
кулачке H определяется длиной хода перемещаемого элемента и равна этой
длине, если переключение производится при помощи переводной вилки, связывающей
кулачок с управляемым элементом. Если передаточным звеном является рычаг, то
величина H будет зависеть и от соотношения плеч рычага.
Профилирование
криволинейных пазов на развертках барабанов
выполняют при помощи графика частот вращения (рисунок 6.2).
Напротив графика частот вращения в
произвольном масштабе наносится контур развертки в виде прямоугольника со
сторонами πD и L, величины которых на начальном этапе работы еще неизвестны. Далее
в этом прямоугольнике наносится сетка, состоящая из вертикальных и
горизонтальных линий. Количество вертикальных линий определяется числом
положений, которое может занимать подвижный блок при переключении, а
горизонтальных - числом частот вращения коробки передач. Расстояния между
вертикальными линиями сетки известны и равны ходов переключаемого блока.
Анализируя график частот вращения,
определяют, сколько раз должен быть переключен тот или иной блок за один оборот
управляющего барабана.
В соответствии с необходимыми
переключениями на развертку наносят траекторию паза.
Диаметр D барабана зависит от количества частот
вращения Z, максимальной величины подъема H и допустимого угла подъема профиля.
При проектных расчетах  , а диаметр ролика
, а диаметр ролика  , Z = 16.
, Z = 16.
резание зубчатый электродвигатель
кинематический
Рисунок 6.2 - Построение разверток
барабанных кулачков: а - барабанные кулачки; в-развертки кулачков
Диаметр барабанного кулачка
определяется выражением:

Расчетный диаметр получился большим.
В этом случае однорукояточное управление нецелесообразно из-за значительного
увеличения габаритов коробки. Поэтому применяем 2 барабана, управляемых
независимо друг от друга. При этом каждый барабан имеет четырех фиксированных
положения, т.е. четыре скорости.
Минимальный диаметр барабанного
кулачка:

Для произвольной схемы кулачкового
механизма вводят два коэффициента приведения λ1 и λ2, которые учитывают
отличие произвольной схемы кулачкового механизма от эталонной (дисковый
кулачек). При этом различие в типе и размерах башмака учитывают коэффициентом λ1, а различие в конструкции и размерах толкателей - λ2.
Длина рукоятки
 мм.
мм.
Принимаем lp = 120 мм.
Список литературы
1. Справочник технолога машиностроителя. Т2, под ред. А.Т.
Косиловой, М.: Машиностроение, 1986;
2. Металлорежущие станки, Колев Н.С.: машиностроение, 1980 г.
. Конструирование и расчет металлорежущих станков и
станочных комплексов. Курсовое проектирование: Учеб. Пособие для вузов. - Мн.:
Выш. Шк., 1991, - 382 с.: ил. под ред. Кочергин А.И.
. Справочник технолога машиностроителя. Т1, под ред. А.Т.
Косиловой, М.: Машиностроение, 1986;
5. Справочник конструктора-машиностроителя. Анурьев В.И., М.:
машиностроение, 2001.
6. Тарзиманов Г.А. Проектирование металлорежущих станков. М.:
Машиностроение, 1979, - 312 с.
. Курсовое проектирование металлорежущих станков. Часть 1.
Учебное пособие. Смоликов Н.Я., Подлеснов В.Н., Чурбанов В.Ф. и др. /
Волгоград. гос. техн. Ун-т, Волгоград, 1994, 161 с.
. Детали машин в примерах и задачах. Под общ. ред. Н.С.
Ничипорчика. - Мн.: Выш.шк., 1981, 432 с.
. Курсовое проектирование деталей машин: Справ. пособие.
Часть 2/ А.В. Кузьмин, Н.Н. Макейчик и др. - Мн.: Выш. шк., 1982 - 334 с.
. Атлас конструкций деталей машин/ Под.ред. Решетова Д.Н. -
М.: Машиностроение, 1979.
. Металлорежущие станки, Учебное пособие для ВУЗов.Н.С.
Колев, Л.В. Крашиченко и др. - М.: Машиностроение, 1980, 500 с.