Система передачи команд телерегулирования
Введение
помехозащита синхроимпульс код равенство
Телемеханика - область науки и техники, охватывающая теорию и
технические средства контроля и управления объектами на расстоянии с
применением специального преобразования сигналов для эффективного использования
каналов.
Все процессы управления и контроля при применении средств
телемеханики осуществляются на расстоянии. Информация передается между пунктом
управления (ПУ) и одним или несколькими контролируемыми пунктами (КП).
Совокупность технических средств телемеханики, расположенных
на КП либо ПУ и предназначенных для обмена информацией с другим пунктом,
называется устройством телемеханики (УТМ).
Совокупность УТМ, предназначенных для обмена информацией
между ПУ и всеми КП, составляет комплекс устройств телемеханики.
Система телемеханики - объединение комплекса устройств
телемеханики, датчиков телеконтроля, диспетчерского оборудования и каналов
связи, выполняющая законченную операцию по телемеханизации производственного
процесса.
Если функции управления и контроля переложены на ЭВМ и
управление объектов осуществляется без участия человека, то система
телемеханики называется телеавтоматической.
Современные системы телемеханики лучше защищены от помех за
счет более совершенных кодов, а сжатие данных позволяет увеличить объем
передаваемой информации по тем же каналам связи. Кроме того, многие системы
телемеханики имеют устройство самоконтроля, способное обнаружить ошибки, как в
самой системе, так и в сигналах синхронизации и передаваемой информации.
Системы телемеханики используют во многих отраслях народного
хозяйства самостоятельно или в составе автоматизированных систем управления.
Обеспечение различных отраслей народного хозяйства средствами
телемеханики производится путем их агрегатного построения из унифицированных
блоков. В настоящее время разработан агрегатный комплекс средств
телемеханической техники (АСТТ). Элементной базой этого комплекса являются
интегральные микросхемы (ИМС). На функциональных блоках и узлах, выполненных на
ИМС, строятся системы телемеханики.
Целью данной курсовой работы является введение студента в
круг проблем, которые возникают при проектировании и расчете структур и узлов
систем (или устройств) телемеханики. При этом проектирование и расчет средств
телемеханики следует рассматривать как единую комплексную задачу.
В качестве задание на разработку системы телемеханики выдано
техническое задание (ТЗ) на разработку системы приема телемеханической
информации (ТМИ) телерегулирования (ТР). Телерегулирование - регулирование на
расстоянии, при котором измерительная информация о текущем состоянии
регулируемого параметра передаётся по каналу телеизмерения.
Постановка задачи
Тип передаваемой ТУ -ТР
Категория TMC - III ( ).
).
Характер помехозащиты - обнаружение.
Число КП на один ПУ: 30
Число ОУ на один КП: 12
Количество команд: 40
Модель двоичного канала связи:  , симметричная
, симметричная
Помехоустойчивое кодирование: циклическое
Структура линии связи (ЛС): магистральная
Элементная база: ИМС, серии 155, 176, 561
Тип триггера устройства: D - триггер
1.
Выбор типа передачи ТМ - информации, категории системы, характера помехозащиты,
составление формата кода
Помехоустойчивое кодирование - циклическое. При циклическом
способе передачи сигналы передаются непрерывно цикл за циклом. Поскольку сигнал
повторяется многократно, то, несмотря на то, что с ростом числа повторений
происходит линейное увеличение вероятности ошибок в работе системы,
достоверность передачи остается высокой. Это объясняется тем, что ошибка,
возникшая при приеме одного цикла, будет исправлена в следующем.
Т.к. структура линии связи магистральная, то формат кода
будет содержать код номера контролируемого пункта, код номера объекта вызова
телесигнализации и код характера команды. В соответствии с этими данными формат
кода представлен на рисунке 1.1.
|
СИ
|

|

|

|
М
|
|
ИЧКП
|
ПЧКП
|
ИЧОТР
|
ПЧОТР
|
ИЧХК
|
ПЧХК
|
|
|
|
|
|
|
|
|
|
Рисунок 1.1 - Формат кода (СИ - синхроимпульс, ИЧКП -
информационная часть кода контролируемого пункта, ПЧКП - проверочная часть кода
контролируемого пункта, ИЧОТР - информационная часть кода объектов
телерегулирования, ПЧОТР - проверочная часть кода объектов телерегулирования,
ИЧХК - информационная часть характеристического кода, ПЧХК - проверочная часть
характеристического кода, М - маркер)
2. Расчёт элементов кода
.1 Расчёт формата кода синхроимпульса
Для улучшения синхронизации при передаче телемеханической
информации код синхроимпульса будем задавать тремя (dim СИ = 3) логическими
единицами (при этом используем беспаузный тип передачи данных). Временная
диаграмма синхроимпульса представлена на рисунке 2.1.1.
Рисунок 2.1.1 - Временная диаграмма синхроимпульса.
2.2 Расчёт формата кода номера контролируемого
пункта
Для определения количества разрядов кода необходимо
определить число разрядов, требуемое для адресации, заданного КП (ИЧ) и
помехозащищенности кода (ПЧ), т.е.:
где n1 - полное число кода, k1 - число информационных
разрядов кода, m1 - число проверочных разрядов кода.
Число информационных разрядов кода вычисляется исходя из
заданного числа контролируемых пунктов, приходящихся на один пункт управления:
 .
.
Гипотеза №1: для обеспечения передачи с вероятной
возможной ошибкой  достаточно обнаруживать ошибки кратности r=2.
достаточно обнаруживать ошибки кратности r=2.

где  .
.
Для случая с обнаружением ошибки имеем  :
:
 .
.
В результате получается код (9;5).
Произведем проверку гипотезы №1:  ,
,
где  при r=2, n = n1=9, p=2∙10-4.
при r=2, n = n1=9, p=2∙10-4.
Получаем:
 следовательно, гипотеза №1 выполняется.
следовательно, гипотеза №1 выполняется.
2.3 Расчёт формата кода ОТМ
Для определения количества разрядов кода необходимо
определить число разрядов, требуемое для передачи информации на заданное число
объектов телемеханизации (ОТМ), приходящихся на один КП:
 ,
,
где  - полное число кода;
- полное число кода;  - число информационных
разрядов кода;
- число информационных
разрядов кода;  - число проверочных разрядов кода.
- число проверочных разрядов кода.

Гипотеза №2: для обеспечения передачи с вероятной
возможной ошибкой достаточно обнаруживать ошибки кратности r=2.
Для случая с исправлением ошибки первой кратности имеем  .
.

В результате получается код ( .
.
Произведем проверку гипотезы №1: ,
Получаем:

следовательно, гипотеза №2 выполняется.
2.4 Расчёт формата характеристического кода
Для определения количества разрядов кода необходимо
определить число разрядов, требуемое для передачи определенного числа команд:
 ,
,
где  - полное число кода;
- полное число кода;  - число информационных
разрядов кода;
- число информационных
разрядов кода;  - число проверочных разрядов кода.
- число проверочных разрядов кода.

Гипотеза №3: для обеспечения передачи с вероятной
возможной ошибкой  достаточно обнаруживать ошибки кратности r=2.
достаточно обнаруживать ошибки кратности r=2.
Для случая с исправлением ошибки первой кратности имеем  .
.

В результате получается код ( .
.
Произведем проверку гипотезы №1:  ,
,
где  при r=2, n = n3=7, p=2∙10-4.
при r=2, n = n3=7, p=2∙10-4.
Получаем:

следовательно, гипотеза №3 выполняется.
2.5 Расчёт формата кода М
Для контроля рассинхронизации маркер будем задавать одиночным
импульсом - логической «1» (dim M = 1).
Полученный формат кода представлен на рисунке 2.5.1
|
СИ
|
K{NКП}
|
K{NОТР}
|
K{ХК}
|
М
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3
|
5
|
4
|
4
|
3
|
6
|
4
|
1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 2.5.1 - Формат кода с рассчитанными элементами (СИ -
синхроимпульс, КП - контролируемый пункт, ОТР - объект телерегулирования, ХК -
характеристический код, М - маркер)
3. Выбор образующих многочленов кода, составление
проверочных равенств
.1 Выбор образующего многочлена
Произведем синтез декодирующего устройства на основе
устройства деления модулярных многочленов (ММ).
Степень образующего многочлена не должна быть меньше числа
проверочных разрядов, определяющих синдром ошибки и предназначенных для
кодирования исправляемого разряда, т.е.  , т.к. такую разрядность
имеет проверочная часть кода номера КП. При этом минимальное кодовое расстояние,
определяющее число ненулевых составляющих ММ, равно:
, т.к. такую разрядность
имеет проверочная часть кода номера КП. При этом минимальное кодовое расстояние,
определяющее число ненулевых составляющих ММ, равно:
 .
.

Из таблицы неприводимых ММ выбираем образующий многочлен
вида:
 .
.
Степень образующего многочлена 4, кодовое расстояние  , кратность исправляемой
ошибки
, кратность исправляемой
ошибки  .
.
3.2 Составление проверочных равенств
Составим образующую матрицу G и проверочную матрицу H для кода номера КП  .
.
Образующая матрица G выбирается из выражения:
 .
.
Проверочная матрица H выбирается из выражения:
 .
.
Исходя из вышеприведенных выражений получаем  .
.





Матрицы G и H примут вид:
Составим проверочный расчет:
 - код, подаваемый в канал связи;
- код, подаваемый в канал связи;
 - код, смешанный с помехой в канале связи;
- код, смешанный с помехой в канале связи;
 - синдром ошибки, указывающий на искажающий
разряд помехозащищённого кода.
- синдром ошибки, указывающий на искажающий
разряд помехозащищённого кода.
Будем подавать в канал связи код: a(k) = 10110, и зададим
помеху ξ(k) = 000010000.

Если посмотреть на пятую строчку проверочной матрицы H, то видно, что синдром
ошибки указывает на искаженный разряд, который с помощью дешифрации синдрома
ошибки в процессе передачи кода будет обнаружен. Таким образом, можно сделать
вывод, что расчет образующей матрицы G и проверочный матрицы H выполнен правильно.
В результате выбора образующего многочлена с вида , формат кода примет вид,
изображенный на рисунке 3.2.1.
|
СИ
|
K{NКП}
|
K{ХК}
|
М
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3
|
5
|
4
|
4
|
3
|
6
|
4
|
1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 3.2.1 - Конечный формат кода с рассчитанными
элементами (СИ - синхроимпульс, КП - контролируемый пункт, ОТР - объект
телерегулирования, ХК - характеристический код, М - маркер)
.3 Синтез циклического кодирующего устройства
(ЦКУ)
Рассмотрим алгоритм конструирования ЦКУ.
Выбор образующего многочлена g(x) ЦК по требованиям его
корректирующей способности .
Вычисление Д-образа g(x):

Конструирование передаточной функции Φ(d):
Структурная схема реализации передаточной функции Φ(d)
представлена на рисунке 3.3.1.
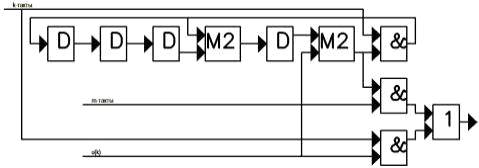
Рисунок 3.3.1 - Структурная схема УДММ кода (9;5) (D - D-триггер, М2 - сумматор
по mod2, & - элемент И, 1 -
элемент ИЛИ, u(k) - исходный код)
Построение (A,B,C,H) - представления
процесса деления и вывода информационной части кода в КС.
 ,
,
где u(k) - входная кодовая последовательность, принимаемая из канала
связи.
Рассмотрим пример для передачи кода номера КП - (n1;k1) = (9;5).
В соответствии с рисунком 3.3.1 находим матрицы А, B, C, H:

Построение ( ) - представление процесса вывода остатка от
деления в КС.
) - представление процесса вывода остатка от
деления в КС.
 где
где  тогда
тогда
В соответствии с рисунком 3.3.1 находим матрицы  :
:

Проверка правильности функционирования.

Будем передавать в канал связи помехозащищённый код вида:
Для передачи информационной части кода необходимо замкнуть
1-й и 3-й ключи:
Таблица 1
|
Номер такта
|
Входное
воздействие u(k)
|
Вектор
состояния x(k+1)
|
Выход системы y(k)
|
|
0
|
1
|
[1110]
|
1
|
|
1
|
0
|
[0111]
|
0
|
|
2
|
1
|
[1111]
|
1
|
|
3
|
1
|
[1011]
|
1
|
|
4
|
0
|
[1001]
|
0
|
|
5
|
0
|
[1000]
|
1
|
0
|
[0100]
|
0
|
|
7
|
0
|
[0010]
|
1
|
|
8
|
0
|
[0001]
|
0
|
Рассмотрим пример для передачи кода номера ОТР - (n2;k2) = (7;4).
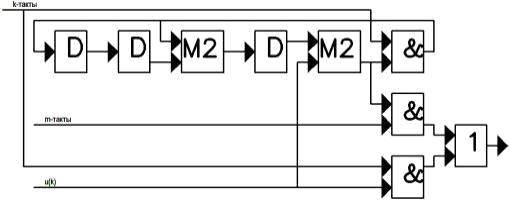
Рисунок 3.3.2 - Структурная схема УДММ кода (7;4) (D - D-триггер, М2 - сумматор
по mod2, & - элемент И, 1 -
элемент ИЛИ, u(k) - исходный код)
В соответствии с рисунком 3.3.2 находим матрицы A, B,C,H:


Построение  - представление процесса вывод остатка от
деления в КС.
- представление процесса вывод остатка от
деления в КС.
В соответствии с рисунком 3.3.2 находим матрицы 


Проверка правильности функционирования.



Таблица 2
|
Номер такта
|
Входное
воздействие u(k)
|
Вектор
состояния x(k+1)
|
Выход системы y(k)
|
|
0
|
1
|
[110]
|
1
|
|
1
|
0
|
[011]
|
0
|
|
2
|
1
|
[111]
|
1
|
|
3
|
1
|
[101]
|
1
|
|
4
|
0
|
[100]
|
1
|
|
5
|
0
|
[010]
|
0
|
|
6
|
0
|
[001]
|
0
|
Рассмотри пример для передачи кода ХК - (n3;k3) = (10;6).
Рисунок 3.3.3 - Структурная схема УДММ кода (10;6) (D - D-триггер, М2 - сумматор
по mod2, & - элемент И, 1 -
элемент ИЛИ, u(k) - исходный код)
В соответствии с рисунком 3.3.3 находим матрицы A, B, C, H:


Построение  - представление процесса вывод остатка от
деления в КС.
- представление процесса вывод остатка от
деления в КС.
В соответствии с рисунком 3.3.3 находим матрицы 

Проверка правильности функционирования.


Таблица 3
|
Номер такта
|
Входное
воздействие u(k)
|
Вектор
состояния x(k+1)
|
Выход системы y(k)
|
|
0
|
1
|
[0001]
|
1
|
|
1
|
0
|
[0010]
|
0
|
|
2
|
1
|
[0100]
|
1
|
|
3
|
0
|
[1000]
|
0
|
|
4
|
0
|
[0011]
|
0
|
|
5
|
1
|
[0110]
|
1
|
|
6
|
0
|
[1100]
|
0
|
|
7
|
0
|
[1011]
|
0
|
|
8
|
0
|
[0101]
|
1
|
|
9
|
0
|
[1010]
|
0
|
В результате потактовой передачи с выхода кодирующего
устройства в КС поступил помехозащищенный код, соответствующий рассчитанному f(x), следовательно,
устройство функционирует верно.
4. Составление функциональной схемы полукомплекта
Функциональная схема устройства, осуществляющего передачу,
прием и обработку полученного кода, представлена на рисунке 4.1.
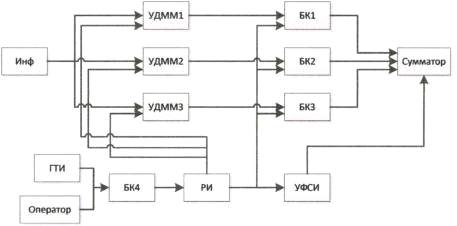
Рисунок 4.1 - Функциональный состав полукомплекта (Инф -
информационный код, ГТИ - генератор тактовых импульсов, УДММ - устройство
деления модулярных многочленов, РИ - распределитель импульсов, УФСИ - устройство
формирования синхроимпульса, БК - блок кодирования)
Сначала все ключи закрыты. Оператор осуществляет пуск
системы. В следствие чего в схему начинают поступать сигналы с генератора
тактовых импульсов (ГТИ). Сигналы поступают на двоичный счётчик - блок
кодирования (БК4). С него сигналы поступают на распределитель импульсов (РИ). С
РИ сигнал поступает на устройство формирования синхроимпульса (УФСИ). После
чего первые 5 тактов открыты ключ 1 и 3. Затем ключи 1 и 3 закрывается и
открывается ключ 2. Информационная часть кода поступает на ЦКУ, где происходит
её деление. После передачи всех 9 информационных разрядов сигнал уходит в линию
связи. Затем аналогично формируются следующие 7 информационных разрядов. После
формируются ещё 10 информационных разрядов и наконец выдаётся маркер сброса.
После передачи формируется сигнал сброса, обнуляющий значения ГТИ и счётчика.
5. Аналитический синтез устройства,
разрабатываемого до уровня принципиальной схемы
В соответствии с ТЗ на курсовую работу, для реализации устройства
необходимо использовать D-триггер, схема которого представленный на рисунке 5.1.
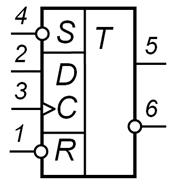
Рисунок 5.1. - Условное графическое изображение D-триггера (1 R - вход сброса, 2 D - информационный вход, 3
C - вход синхронизации, 4 S - вход установки, 5 -
выход, 6 - инверсный выход)
Таблица истинности для D-триггеров показана в
таблице 4.
Таблица 4
|
C
|
D
|
Q
|

|
|
|
0
|
1
|
|
0
|
0
|
0
|
1
|
|
0
|
1
|
1
|
|
1
|
0
|
0
|
0
|
|
1
|
1
|
1
|
1
|
-триггер запоминает состояние входа и выдаёт его на выход. D-триггеры имеют, как
минимум, 2 входа: информационный D и синхронизации C. После прихода активного фронта импульса
синхронизации на вход С D-триггер открывается. Сохранение информации в D-триггере происходит
после спада импульса синхронизации С. Так как информация на выходе остаётся
неизменной до прихода очередного импульса синхронизации, D-триггер называют
также триггером с запоминанием информации или триггером-защёлкой.
Воспользуемся микросхемой К155ТМ2. Она содержит два
независимых D-триггера с входами сброса и установки, R и S соответственно.
Схема микросхемы представлена на рисунке 5.2.
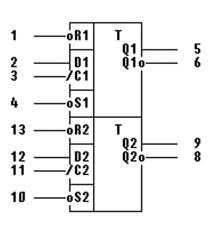
Рисунок 5.2 - Схема ИМС К155ТМ2
Микросхема К155ТМ2 содержит два независимых
D-триггера, имеющих общую цепь питания. Триггера срабатывают по положительному
фронту тактового сигнала. У каждого триггера есть входы D,  и
и  а также комплементарные
выходы Q и
а также комплементарные
выходы Q и  . Входы и - асинхронные, потому
что они работают (сбрасывают состояние триггера) независимо от сигнала на
тактовом входе; активный уровень для них - низкий. Сигнал от входа D передается
на выходы Q и по положительному перепаду импульса на тактовом
входе С (от Н к В). Чтобы триггер К155ТМ2 переключился правильно, уровень на
входе D следует зафиксировать заранее, перед приходом тактового перепада.
Защитный интервал должен превращать время задержки распространения сигнала в
триггере. Если на входы и триггеров одновременно
подаются напряжения низкого уровня, состояние выходов Q и окажется неопределенным.
Загрузить в триггер входные уровни В или Н (т.е. 1 или 0) можно, если на входы и подать направления
высокого уровня.
. Входы и - асинхронные, потому
что они работают (сбрасывают состояние триггера) независимо от сигнала на
тактовом входе; активный уровень для них - низкий. Сигнал от входа D передается
на выходы Q и по положительному перепаду импульса на тактовом
входе С (от Н к В). Чтобы триггер К155ТМ2 переключился правильно, уровень на
входе D следует зафиксировать заранее, перед приходом тактового перепада.
Защитный интервал должен превращать время задержки распространения сигнала в
триггере. Если на входы и триггеров одновременно
подаются напряжения низкого уровня, состояние выходов Q и окажется неопределенным.
Загрузить в триггер входные уровни В или Н (т.е. 1 или 0) можно, если на входы и подать направления
высокого уровня.
Устройства деления на модулярный многочлен (УДММ) в
исполнении на D-триггерах
представлены на рисунках 5.3 - 5.5.
Рисунок 5.3 - Принципиальная схема УДММ кода (9;5) (1 - k-такты, 2 - m-такты, 3 - (u(k)), 5 - синхросигнал)

Рисунок 5.4 - Принципиальная схема УДММ кода (7;4) (1 - k-такты, 2 - m-такты, 3 - (u(k)), 5 - синхросигнал)
Рисунок 5.5 - Принципиальная схема УДММ кода (10;6) (1 - k-такты, 2 - m-такты, 3 - (u(k)), 5 - синхросигнал)
Устройство формирования синхроимпульса (УФСИ), выполненное на
D-триггерах, представлено
на рисунке 5.6.
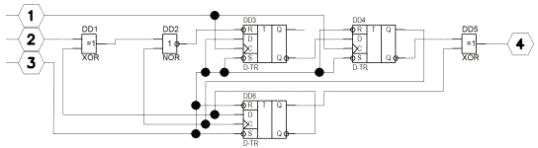
Рисунок 5.6 - Принципиальная схема УФСИ.
Данное устройство имеет шесть входов:
1.генератор тактовых импульсов;
2.сигнал запуска схемы на исполнение;
3.подключение источника питания на +5В;
4.выдаваемый во входной регистр код;
5.выдаваемый в канал связи помехозащищённый код;
6.подключение общего провода;
Поэтому для подключения устройства выберем разъем - WF-6R
фирмы Ningbo Zhenqin Electronic на 6 контактов (на ЭЗ имеет обозначение XR1).
6. Разработка принципиальной схемы и её описание
Основные этапы разработки электрической схемы приведены в
предыдущем пункте, ниже поэтапно опишем работу устройства передачи кода вызова
телерегулирования.
Вначале все ключи закрыты. Оператор осуществляет запись
передаваемого кода во входной регистр, после чего запускается устройство
формирования синхроимпульсов, реализованное на счетчике импульсов, дешифраторах
и схемах возбуждения входов ключей, реализованных на D триггерах. На первых
трех тактах работы происходит передача синхроимпульса, представляющего собой
код, состоящий из 3-х логических единиц. Далее на четвертом такте открываются
ключи 1 и 3, в результате чего информационная часть кода подается в канал связи
(КС) и на циклическое кодирующее устройство (ЦКУ), где происходит ее деление.
После передачи всех пяти информационных разрядов кода номера КП, на десятом
такте, ключи 1 и 3 закрываются, и открывается ключ 2, в результате чего в
течение четырех следующих тактов из ЦКУ в КС передаются четыре проверочных
разряда кода номера КП. На тринадцатом такте снова открываются ключи 1 и 3, а
ключ 2 закрывается, вследствие чего, на последующих четырёх тактах
осуществляется передача следующей четырёхразрядной информационной части кода
характера команды.
Последующие такты работы устройства аналогичны описанным
выше. В итоге, на 29-ом такте работы, происходит закрытие ключа 2 и передача
маркера в виде одноразрядного кода логической единицы в КС, а также на ключ
генератора тактовых импульсов и на двоичный счетчик импульсов, в результате
чего происходит его обнуление. Далее устройство снова готово к передаче кода.
Принципиальная электрическая схема устройства представлена в
документе КСУИ.5142.221.001 Э3.
Перечень элементов устройства представлен в документе
КСУИ.5142.221.001 ПЭ.
Заключение
В ходе выполнения курсовой работы было синтезировано
циклическое кодирующее устройство. Рассчитаны коды (9;5) для номера КП, (7;4)
для номера ОТР и (10;6) для ХК. На m-ном шаге получался остаток от деления на
модулярный многочлен. Код способен обнаруживать ошибки второй кратности.
Обеспечена помехоустойчивость, соответствующая требования ТЗ. В качестве
элементной базы выбрана серия 155, в соответствии требования ТЗ.