Разработка нереверсивного электропривода постоянного тока
ВВЕДЕНИЕ
Рациональное проектирование современного
автоматизированного электропривода требует глубокого знакомства с условиями
работы производственного механизма, для которого привод предназначен. Высокая
производительность механизма и хорошее качество выпускаемой им продукции могут
быть обеспечены лишь при надлежащем сочетании статических и динамических
характеристик привода и рабочей машины. Кинематика и конструкция всей рабочей
машины в целом в значительной мере определяется типом примененного привода. В
то же время имеет место и обратное влияние рабочей машины на привод. В связи с
этим сложные задачи проектирования - создание новых типов комплексного
электропривода для различного технологического оборудования, разработка
серийных образцов установок с электроприводом и т. п. - решаются обычно
специализированными организациями с участием технологов, механиков, электриков,
приводчиков, специалистов из других областей. Отдельному инженеру, связанному с
электроприводом, приходится решать более простые задачи проектирования.
Обычно они имеют следующие формулировки:
·
взамен
устаревшего электропривода данной установки разработать современный, с лучшими
техническими и экономическими показателями;
·
взамен
нерегулируемого электропривода агрегата применить регулируемый;
·
разработать
электропривод, которым можно заменить импортный, не обеспеченный запасными
элементами;
·
разработать
электропривод какой-либо установки, изготавливаемый силами предприятия и тому
подобное.
Проектирование любого электропривода может вестись
лишь на основе тщательно разработанного технического задания, в котором должны
быть учтены все особенности производственного процесса и условия работы
исполнительного механизма. В задании должны найти отражение вопросы, касающиеся
характера и величины статического момента, необходимых процессов регулирования
скорости, плавности регулирования, требуемого комплекса механических
характеристик, условий пуска, торможения и другие.
1. Выбор системы электропривода и разработка
функциональной схемы привода
Электроснабжение промышленных предприятий
осуществляется трехфазным током частотой 50 Гц. При необходимости получения
энергии постоянного тока неизбежно приходится прибегать к преобразователям.
Преобразование энергии связано с дополнительными капиталовложениями и
эксплуатационными расходами (потери энергии при преобразовании, обслуживание
преобразователей). Таким образом, стоимость единицы энергии постоянного тока на
промышленном предприятии всегда выше стоимости единицы энергии переменного
тока.
Двигатели переменного тока - синхронные и
асинхронные - значительно дешевле двигателей постоянного тока и имеют меньший
вес. В связи с большей простотой конструкции обслуживание их намного проще. Они
принципиально более надежны и имеют меньший момент инерции. Тем не менее,
приводы переменного тока применяются редко из-за ограниченных возможностей
асинхронного двигателя при регулировании скорости.
На данный момент, наиболее перспективным
является частотный метод регулирования скорости асинхронного двигателя. Но для
питания машины в этом случае требуется относительно сложный преобразователь,
который должен обеспечивать регулирование не только частоты, но и напряжения,
подводимого к статору электродвигателя.
Выходит что, простота и другие достоинства
асинхронного двигателя «уравновешивается» сложностью системы управления.
Сравнение экономических показателей электроприводов постоянного и переменного
тока показывает, что электропривод переменного тока дороже вследствие высокой
стоимости высокочастотной преобразовательной техники.
Поэтому, в дальнейшем, асинхронный двигатель
рассматривать не будем и выбираем электропривод постоянного тока.
Рассмотрим типы двигателей постоянного тока:
высокомоментные, с самовозбуждением, с независимым возбуждением, с
последовательным возбуждением, с параллельным возбуждением и со смешанным
возбуждением.
Исходя из того, что разрабатываемый привод
регулируемый, двигатель постоянного тока с самовозбуждением не удовлетворяет
этому требованию.
Проанализируем механические характеристики
остальных типов двигателей постоянного тока (рисунок 1.1):
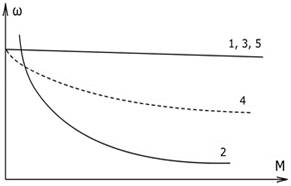
Рисунок 1.1 - Механические характеристики
двигателей постоянного тока.
Двигатели постоянного тока с последовательным и
смешанным возбуждением имеют мягкие характеристики, соответственно 2 и 4.
Поэтому для регулирования скорости они также не подходят.
Высокомоментные двигатели постоянного тока имеют
жесткую характеристику 1, но пределы регулирования частоты вращения двигателей
составляют 1:10 - 1:20, что для заданного привода недостаточно.
Двигатели постоянного тока с параллельным и
независимым возбуждением также имеют жесткие характеристики соответственно 3 и
5, но двигатели постоянного тока с независимым возбуждением имеют лучшие
регулировочные характеристики при широком диапазоне регулирования частоты
вращения.
Двигатели независимого возбуждения наиболее
полно удовлетворяют основным требованиям, предъявляемым к исполнительным
двигателям, таким как:
·
отсутствие
самохода (самоторможение двигателя при снятии сигнала управления);
·
широкий
диапазон регулирования частоты вращения;
·
линейность
механических и регулировочных характеристик;
·
устойчивость
работы во всем диапазоне частот вращения;
·
большой
пусковой момент;
·
малая
мощность управления;
·
быстродействие;
·
надежность
работы;
·
малые
габариты и масса.
Таким образом, выбираем двигатель постоянного
тока с независимым возбуждением. Выбор осуществляем на основании следующих
данных:
Требуемая наибольшая частота
вращения двигателя: 
·
Эквивалентная
мощность:

По справочным данным выбираем двигателя
постоянного тока 2ПН160МУХЛ4 со следующими характеристиками:
мощность 
номинальное напряжение на обмотке
якоря 
номинальное напряжение на обмотке
возбуждения 
номинальная частота вращения 
максимальная частота вращения 
КПД 
сопротивление обмотки якоря  Ом.
Ом.
сопротивление добавочных полюсов  Ом.
Ом.
сопротивление обмотки возбуждения  Ом.
Ом.
индуктивность якорной цепи 
момент инерции 
Рассчитаем параметры двигателя:
·
номинальная
скорость вращения:

·
номинальный
момент:
·
номинальный
ток возбуждения:

Kt - температурный
коэффициент равный 1,28
·
номинальный
ток в обмотке якоря:

·
сопротивление
якорной цепи:

Принимая
 , получим:
, получим:
 = 0,994 Ом.
= 0,994 Ом.


Системы регулируемого электропривода являются
замкнутыми системами. В них используются обратные связи по току, напряжению,
ЭДС и скорости вращения двигателя. В настоящее время в регулируемых приводах в
основном применяются две структуры:
Системы с общим суммирующим усилителем, в
которых задающий сигнал и сигнал обратной связи подаются на общий суммирующий
усилитель.
Системы с подчиненным регулированием координат,
в которых число регуляторов равно числу регулируемых величин. В таких системах
выходной сигнал одного регулятора является задающим для другого.
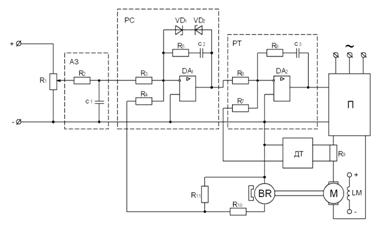
Рисунок 1.2 - Функциональная схема
электропривода с подчиненным регулированием координат
АЗ - апериодическое звено
РС - регулятор скорости
РТ - регулятор тока
П - силовой преобразователь;
ДТ - датчик тока;
М - двигатель;- обмотка возбуждения;-
тахогенератор;1, DA2 - операционные усилители;
R1
- R11
- резисторы;
С1 - С3 -
конденсаторы;1, VD2
- стабилитроны.
Преимуществом систем с подчиненным
регулированием координат является простота наладки и обеспечения требуемых
динамических характеристик (быстродействия, перерегулирования,
колебательности). Поэтому выбираем систему регулируемого электропривода с
подчиненным регулированием координат, функциональная схема которой изображена
на рисунке 1.2:
. Выбор и проектирование элементов силовой схемы
электропривода
Первые преобразователи, которые применялись в
регулируемом электроприводе постоянного тока, были электромашинные усилители,
которые содержали генератор постоянного тока и асинхронный или синхронный
двигатель. Они позволяли преобразовывать энергию переменного тока в энергию
постоянного тока и регулировать величину напряжения изменением напряжения на
обмотке возбуждения генератора. Для этого использовали машинные усилители.
Однако они имели существенные недостатки такие как: низкий КПД, наличие двух
машин увеличивало шум, стоимость и габариты системы.
При небольших мощностях использовались системы с
магнитным усилителем, основой которого служит ферромагнитный сердечник с
обмотками.
В настоящее время в электротехнике широко
применяются вентильные преобразователи: выпрямители, инверторы, преобразователи
частоты. Управляемые вентильные преобразователи чаще используются для якорного
управления двигателем независимого возбуждения и являются управляемыми
выпрямителями. Источником энергии является сеть переменного тока.
Принцип управления состоит в том, что в
положительный период вентиль подобно ключу открывается и подает напряжение к
якорю. Изменяя момент (фазу) открытия вентиля, меняют среднее значение
напряжения на якоре и, таким образом, управляют работой двигателя. Напряжение и
ток на выходе такого преобразователя содержат постоянные и переменные
составляющие.
В качестве управляемых вентилей применяются
тиристоры.
Существует большое число различных схем
управляемых выпрямителей: однополупериодные и двухполупериодные (мостовые) с
различным числом фаз, полностью управляемые и полууправляемые.
В качестве преобразователя выбираем мостовую
полностью управляемую трехфазную схему выпрямления, изображенную на рисунке
2.1.
В отличие от других схем эта схема имеет меньшие
пульсации, их частота в 2 раза выше, нет постоянного подмагничивания. Однако
для управления тиристорами необходима более сложная схема управления.
Управляющие сигналы, которые открывают
тиристоры, подаются в последовательности VS1-VS6-VS3-VS2-VS5-VS4 со сдвигом
60°, т.е. фазность выпрямления m=6, причем тиристоры VS1, VS3 и VS5 открываются
в положительные, а тиристоры VS2, VS4, VS6 в отрицательные полупериоды фазных
напряжений. Так как интервал проводимости каждого тиристора равен 120°, в каждый
момент времени открыты два тиристора (по одному в плече моста).
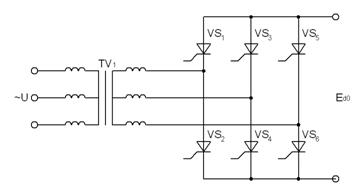
Рисунок 2.1 - Трехфазная мостовая схема
выпрямления
ЭДС преобразователя при полностью открытых
тиристорах Еd0
= UЯН.
Из формулы:
Найдем напряжение на вторичной
обмотке трансформатора:
где m - число
пульсаций выпрямленного напряжения за период сети m=6.
Уточним значение
Е2у = Е2 КС
К КР = 162,9·1,1·1,2·1,05 = 225,8 В
КС = 1,1 - коэффициент
запаса по напряжению, учитывающий возможность понижения напряжения в сети;
К = 1,2 - коэффициент запаса,
учитывающий неполное открытие вентилей при максимальном сигнале управления;
КР = 1,05 - коэффициент
запаса, учитывающий падение напряжения в тиристорах, обмотках трансформатора.
Определим коэффициент трансформации:
Фазное напряжение на вторичной
обмотке трансформатора:
Действующее значение тока вторичной
обмотки трансформатора:
Действующее значение тока первичной
обмотки трансформатора:
Мощность трансформатора:

Рассчитаем активное сопротивление
трансформатора:
где UA=0,03 - активная
составляющая падения напряжения на трансформаторе при коротком замыкании.

Рассчитаем индуктивность обмоток трансформатора:
Рассчитаем и выберем тиристоры.
Найдем максимальное обратное напряжение на тиристоре:

Тиристоры выбираем также по току
стопорения двигателя:

По этим данным выбираем тиристоры
серии КУ239А со следующими характеристиками:
Uобр max
= 400 В;
Импульсный ток в открытом
состоянии: Iпр = 250 А;
Отпирающее напряжение
управляющего электрода: 20 В.
. Выбор параметров элементов систем управления с
учетом заданного диапазона и точности регулирования
Предварительные расчёты показали, что для
выполнения требований по точности в контуре скорости необходимо использовать
ПИ-регулятор и настраивать контур на симметричный оптимум. При этом контур скорости
будет обладать астатизмом 2-го порядка, что устранит статические ошибки по
управляющему воздействию, по возмущению и динамическую ошибку по скорости.
Поэтому электромеханические характеристики данного привода будут иметь вид:
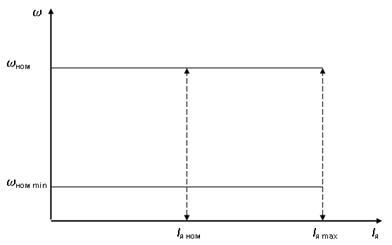
Рисунок 3.1 - Электромеханические характеристики
привода
Таким образом, для данного привода  ,
,  ,
,  ,
,  . Поэтому
привод будет удовлетворять требованиям по точности (
. Поэтому
привод будет удовлетворять требованиям по точности ( ).
).
Исходя из требуемого диапазона
регулирования ( ) определим
) определим  :
:
. Расчет и построение
статических характеристик электропривода
В момент пуска ток якоря может
превышать номинальный в несколько раз. Поэтому величину тока якоря необходимо
ограничивать. В системах электропривода с подчинённым регулированием координат
это сделать достаточно просто. Необходимо увеличивать выходной сигнал
регулятора скорости не более такого значения, при котором ток в обмотке якоря
будет достигать максимальной величины. Для этого применяют стабилитроны,
включаемые в ОС регулятора скорости. Когда регулятор скорости заходит в область
ограничения, ток в обмотке якоря будет равен максимально допустимому значению.
В справочнике [1] находим
максимальный кратковременный ток для двигателя 2ПН160МУХЛ4:

Будем считать, что данное значение
тока якоря является максимально допустимым для данного двигателя. Это значение
тока будем использовать при выборе стабилитронов.
Таким образом, статические
характеристики электропривода будет иметь вид (рисунок 4.1):
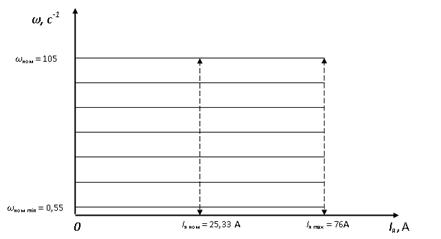
Рисунок 4.1 - Статические
характеристики электропривода
Эквивалентная структурная схема
разрабатываемого электропривода представлена на рисунке 5.1:
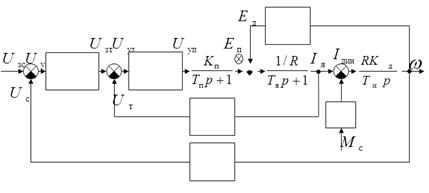
Рисунок 5.1 - Эквивалентная
структурная схема электропривода
Передаточная функция
преобразователя:

Коэффициент усиления
преобразователя:
Постоянная времени преобразователя:

Электромагнитная постоянная
электропривода:

где 
Электромеханическая постоянная электропривода:

регулятор тока (ПИ-регулятор). Его
параметры будем определять в дальнейшем при настройке контуров.
регулятор скорости (ПИ-регулятор).
Его параметры также будем определять в дальнейшем при настройке контуров.
Т.к. контур тока является
быстродействующим, за время переходного процесса величина ЭДС в нём изменится
незначительно. Поэтому ОС по ЭДС пренебрегаем. Также не учитываем при расчёте
момент сопротивления Mс. Тогда
получим упрощённую структурную схему электропривода (рисунок 5.2):
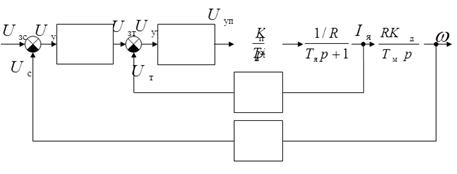
Рисунок 5.2 - Упрощённая структурная
схема электропривода
Данная система представляет собой
двухконтурную систему регулирования с внутренним контуром тока и внешним
контуром скорости. В дальнейшем будет необходимо осуществить настройку контура
тока на технический оптимум и контура скорости на симметричный оптимум.
6. Определение устойчивости системы
Осуществим настройку контуров системы
электропривода.
Рассмотрим контур тока (рисунок
6.1):
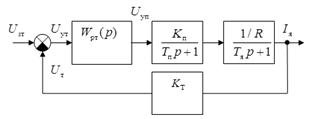
Рисунок 6.1 - Контур тока
Как отмечалось ранее, в качестве
регулятора тока выбираем ПИ-регулятор. Это позволит скомпенсировать “большую”
постоянную времени  . Таким
образом, передаточная функция регулятора:
. Таким
образом, передаточная функция регулятора:
Передаточная функция контура тока в
разомкнутом состоянии:

Принимаем  . Тогда:
. Тогда:
ЛАЧХ такого контура имеет вид
(рисунок 6.2):
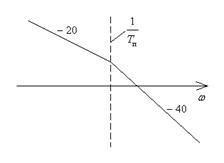
Рисунок 6.2 - ЛАЧХ контура тока
Однако настройка на технический
оптимум предполагает ЛАЧХ следующего вида (рисунок 6.3):
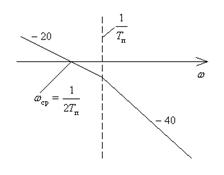
Рисунок 6.3 - Желаемая ЛАЧХ контура
тока
Данной ЛАЧХ соответствует
разомкнутая оптимальная передаточная функция контура тока:
Для определения  приравняем
приравняем  и
и  :
:

Отсюда получим:

Для нахождения необходимо
найти  . Получаем:
. Получаем:
Принимаем  . Тогда:
. Тогда:
Тогда найдём :

Найдём передаточную функцию контура
тока в замкнутом состоянии:

Рассмотрим контур скорости (рисунок
6.4):
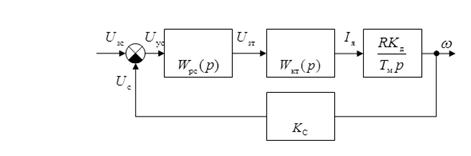
Рисунок 6.4 - Контур скорости
В качестве регулятора скорости выбираем
ПИ-регулятор. Передаточная функция регулятора:
Передаточная функция контура
скорости в разомкнутом состоянии:

Найдём  . Получаем:
. Получаем:


Настройка на симметричный оптимум
предполагает ЛАЧХ следующего вида (рисунок 6.5):
функциональный
переходный диапазон электропривод
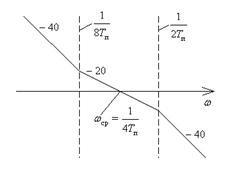
Рисунок 6.5 - Желаемая ЛАЧХ контура тока

Для определения  приравняем
приравняем  и
и  :
:

Принимаем  .
.



Так как контур скорости настроен на
симметричный оптимум, он будет обладать хорошим быстродействием, но
перерегулирование может достигать 43%. Для уменьшения перерегулирования после
задатчика интенсивности введём апериодическое звено. Для определения его
передаточной функции запишем передаточную функцию системы в замкнутом
состоянии:
Для компенсации форсирующей
составляющей будем вводить апериодическое звено с передаточной функцией
следующего вида:
Тогда передаточная функция всей
системы принимает вид:

. Синтез корректирующего устройства
Методика проектирования
электропривода с подчинённым регулированием координат предполагает выбор
структуры и параметров регуляторов и настройку контуров на технический и
симметричный оптимум. Поэтому для данного типа привода синтез корректирующих
устройств не требуется.
8. Расчет переходного
процесса по управляющему воздействию
Эквивалентная структурная схема системы
электропривода представлена на рисунке 8.1:
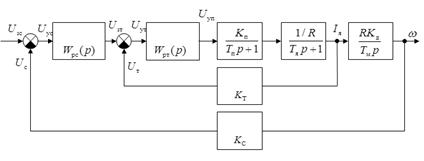
Рисунок 8.1 - Эквивалентная структурная схема
системы электропривода
Для расчёта переходного процесса
системы в относительных координатах принимаем  . При этом по оси абсцисс будет
откладываться время, а по оси ординат
. При этом по оси абсцисс будет
откладываться время, а по оси ординат  при единичном входном сигнале.
Тогда передаточная функция системы в замкнутом состоянии:
при единичном входном сигнале.
Тогда передаточная функция системы в замкнутом состоянии:

Рассчитываем переходной процесс
системы по входному воздействию (реакция системы на ступенчатый сигнал х(t) = 1(t)) через
обратное преобразование Лапласа:

График переходного процесса
отображен на рисунке 8.2:
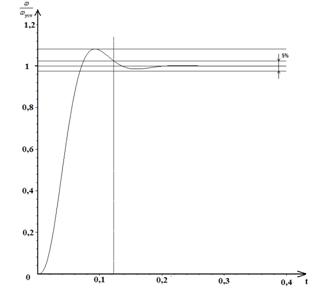
Рисунок 8.2 - График переходного процесса
По графику определяем величину
перерегулирования  и время
переходного процесса tпп = 0,121 с
(< 0,16 с).
и время
переходного процесса tпп = 0,121 с
(< 0,16 с).
Таким образом, переходной процесс удовлетворяет
заданным требованиям.
. Проектирование принципиальной схемы
электропривода
Расчёт схемы питания обмотки возбуждения
Для питания обмотки возбуждения ДПТ рассчитаем
схему выпрямления и трансформатор для ее питания. Выбираем в качестве
выпрямителя мостовую схему, т.к. она имеет наименьший коэффициент пульсаций
(рисунок 9.1):
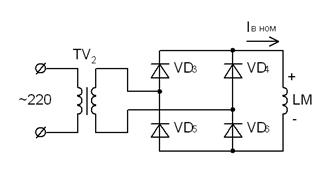
Рисунок 9.1 - Схема питания обмотки возбуждения
Iв ном
= 1,02 А - номинальный ток возбуждения;
Uв ном
= 110 B - номинальное напряжение возбуждения;
Rв
= 108 Ом - сопротивление обмотки возбуждения;
Среднее значение выпрямленного напряжения на
нагрузке:
 , где:
, где:
T - падение
напряжения на активном сопротивлении трансформатора;в ср - падение
напряжения на вентиле.
UT = К1Uв ном=0,02
110=2,2 В, где:
К1 = 0,02 - принимается в
инженерных расчетах.
Принимаем Uв ср 1 = 1 В
для одного открытого диода. Тогда, так как в течение полупериода открыто два
вентиля, следовательно: Uв ср = 2 В.
Учитывая колебания напряжения в сети (домножая
на 1.1), получим:

Напряжение на вторичной обмотке
трансформатора:
U2 Ф =  = 139,6 В.
= 139,6 В.
Коэффициент трансформации:
КТ =  ;
;
Действующее значение тока в первичной обмотке
трансформатора:
I1 =  ;
;
Типовая мощность трансформатора:

Максимальное обратное напряжение на вентиле:

Среднее значение тока вентиля:
Iв ср =  ;
;
По этим данным выбираем вентили
серии КД528А <#"804128.files/image117.jpg">
Рисунок 9.2 - Цепь тахогенератора
Тахогенератор имеет закрытое встроенное
исполнение (якорь генератора жестко закреплён на валу якоря ДПТ). Возбуждение
тахогенератора - от постоянных магнитов. Нагрузочное сопротивление - не менее 2
кОм.
Крутизна напряжения ТГ: Sn = 0,033  или Sw = ЕТГ/w = Sn·30/π,
или Sw = ЕТГ/w = Sn·30/π,
где: ЕТГ - ЭДС
тахогенератора;
w
- круговая частота;
Тогда Sw = 0,033w30/w = 0,315 
Так как R10 + R11 ≥ 2
кОм, то сопротивлением ТГ можно пренебречь. Тогда напряжение с выхода делителя:

Коэффициент передачи ОС по скорости:
Получим систему уравнений, из
которой найдем R10 и R11.
Откуда находим: R10 = 1457 Ом; R11 = 543 Ом.
Выбираем стандартные сопротивления R10 = 1,5 кОм; R11 = 600 Ом.
Расчёт цепи обратной связи по току
В качестве датчика тока (шунта)
используем сопротивление номиналом R9 = 0,1 Ом.
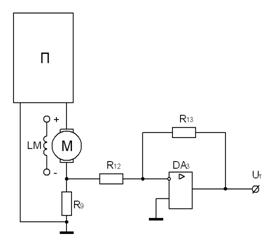
Рисунок 9.3 - Цепь обратной связи по
току
Для согласования коэффициента
обратной связи КТ в цепь обратной связи вводим усилитель. Из
структурной схемы привода следует, что
 ,
,
а  .
.
Усилитель реализуем с помощью
операционного усилителя серии К140УД7 с параметрами:
Кус > 30000, Rвх = 400 кОм, Iвх = 0,4 мкА, Uвх = +15 В, Uвых = +11 В.
Принимаем  . Тогда:
. Тогда:

Расчёт регулятора тока
Схема регулятора тока на операционном усилителе
показана на рисунке 9.4:
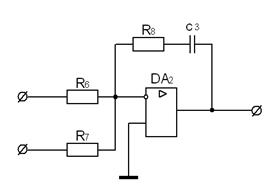
Рисунок 9.4 - Регулятор тока
Выбираем операционный усилитель серии К140УД7 с
параметрами:
Кус > 30000, Rвх
= 400 кОм, Iвх
= 0,4 мкА, Uвх
= +15 В, Uвых
= +11 В.
Принимаем  . Тогда:
. Тогда:

Расчёт регулятора скорости
Схема регулятора тока на операционном усилителе
показана на рисунке 9.5:
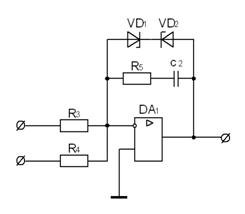
Рисунок 9.5 - Регулятор скорости
Выбираем операционный усилитель серии К140УД7 с
параметрами:
Кус > 30000, Rвх
= 400 кОм, Iвх
= 0,4 мкА, Uвх
= +15 В, Uвых
= +11 В.
Принимаем  . Тогда:
. Тогда:

Ограничение выходного сигнала
регулятора осуществляется с помощью стабилитронов VD1, VD2. Параметры
стабилитронов выбираем исходя из  . Выбираем стабилитроны Д810 с
параметрами Uст ном = 10 В, Iст max = 26 мА.
. Выбираем стабилитроны Д810 с
параметрами Uст ном = 10 В, Iст max = 26 мА.
Расчёт задатчика скорости
Рассчитаем задатчик скорости, выполненный по
схеме потенциометра.
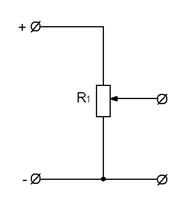
Рисунок 9.6 - Задатчик скорости
Uист
= 10 В, Uвых max
= 10В, Iн
= 0,1 мкА.
Найдём минимальное выходное напряжение
задатчика:


Для обеспечения линейной зависимости
выходного напряжения от входного сопротивления рекомендуется выбирать 
R1 =  = 17,33 кОм.
= 17,33 кОм.
Расчётная мощность
 .
.
Расчёт цепи апериодического звена
В качестве апериодического звена
будем использовать RC-цепочку (рисунок 9.7):
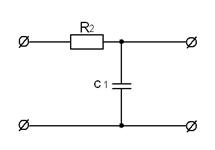
Рисунок 9.7 - Схема апериодического
звена
Принимаем  . Тогда
. Тогда
 .
.
Принципиальная электрическая схема привода
изображена на рисунке 9.8:
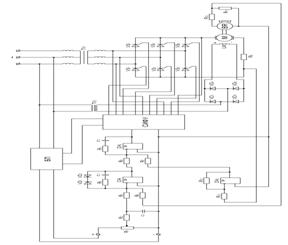
Рисунок 9.8 - Принципиальная электрическая схема
привода
ЗАКЛЮЧЕНИЕ
В данном курсовом проекте был разработан
нереверсивный электропривод постоянного тока. Была выбрана система
электропривода с подчинённым регулированием координат. Мы произвели разработку
функциональной схемы; выбор и проектирование элементов силовой схемы; расчет
параметров элементов с учетом диапазона и точности; расчет и построение
статических характеристик электропривода; разработку эквивалентной структурной
схемы привода и определение передаточных функций элементов; исследование
устойчивости системы электропривода; расчет переходного процесса по
управляющему воздействию, определение показателей качества регулирования;
проектирование принципиальной схемы электропривода.
Электропривод, разработанный в данном проекте,
удовлетворяет заданным требованиям.
ЛИТЕРАТУРА
1.
Справочник по электрическим машинам: В 2 т. / Под ред. И.П. Копылова и Б.К.
Клокова. - М.: Энергоатомиздат, 1988. - 688 с.
2.
Башарин А.В., Голубев Ф.Н. Примеры расчета автоматизированного электропривода:
Учебное пособие / Под общ. ред. А.В. Башарина. - Л.: Энергия. 1972. - 440 с.
.
Справочник по проектированию автоматизированного электропривода и систем
управления технологическими процессами. / Под общ. ред. В. И. Круповича. - М.:
Энергоатомиздат. 1982. - 416 с.
.
Чиликин М.Г., Ключев В.И. теория автоматизированного электропривода: Учебное
пособие для ВУЗов. - М.: Энергия, 1979. - 616 с.
.
Булычев А.Л. Справочник. Аналоговые интегральные микросхемы. Мн.: изд.
Беларусь. - 1985. - 222 с.
.
Ключев В.И. Теория электропривода: Учебник для ВУЗов. - М.: Энергоатомиздат.
1985. - 560 с.
.
Справочник по проектированию автоматизированного электропривода и систем
управления технологическими процессами. /Под ред. О.В. Слежановского. - М.:
Энергоатомиздат. 1983. - 256 с.
.
Забродин Ю.С. Промышленная электроника: Учебник для ВУЗов. - М.: Высшая школа,
1982. - 496 с.
.
Руководство по проектированию систем автоматизированного управления: Учебное
пособие / Под ред. Бесекерского. - М.: Высшая школа, 1983. - 296 с.