Программируемый логический контроллер для управления судовыми механизмами
курсовая
работа
по
дисциплине "Микропроцессорные системы управления"
на
тему:
«Программируемый
логический контроллер
для
управления судовыми механизмами»
Содержание
Введение
.
Задание на курсовую работу
.
Структурная схема ПК
.
Характеристики микропроцессорного модуля NL-4AO
.
Укрупнённая блок-схема алгоритма работы ПК
.
Детальная блок-схема алгоритма работы ПК
.
Расчёт задержки времени
.
Программа работы ПК
Заключение
Список
использованной литературы
логический контроллер время
Введение
Упрощенная структурно-принципиальная схема ПК
содержит набор функциональных узлов, присущих большинству ПК, используемых в
судовых системах автоматики.
Блоки ПК связаны между собой тремя
информационными шинами - шиной адреса (ША), шиной данных (ШД) и шиной управления
(ШУ). Совокупность этих шин образует системную магистраль.
В ПЗУ хранится программа работы контроллера.
Оперативное запоминающее устройство (ОЗУ) служит для временного хранения
данных. Микропроцессор (МП) обеспечивает математическую и логическую обработку
информации и работает по программе хранящейся в ПЗУ, реализует собственно
алгоритм работы ПК. Темп работы МП задается генератором тактовых импульсов.
. Задание на курсовую работу
Целью курсовой работы является разработка
программируемого контроллера (ПК), предназначенного для управления в функции
времени судовыми механизмами дискретного действия.
. Исходные данные для проектирования:
Таблица 1
|
Номера
механизмов
|
Задержка
t,
с
|
Начальный
адрес размещения программы
|
Формулировка
задачи
|
Вид
алгоритма
|
|
1,3,6
|
6
|
80D
|
С
нажатием кнопки первые два механизма пускаются сразу, а механизм 6 через
время t
|
Линейный
|
. Другие данные и условия проектирования:
схема ПК выполняется на основе микропроцессора
КР580ВМ80;
интерфейс ПК выполняется на основе микросхемы программируемого
параллельного интерфейса типа КР580ВВ55;
на незадействованные для управления заданными
механизмами выходы ПК сигналы подаваться не должны;
алгоритм управления запускается в работу
кратковременным (менее t) нажатием управляющей кнопки.
. Тип микропроцессорной микросхемы или блока для
анализа их характеристик: NL-4AO
. Программа разрабатываемого программируемого
контроллера должна быть отлажена на учебном микропроцессорном комплекте и
продемонстрирована в работе во время защиты курсовой работы.
2. Структурная схема ПК
Таймер (Т) используется для организации работы
ПК в функции времени. Контроллер прерываний (КПР) обеспечивает оперативную
реакцию ПК на внешние события, не терпящие отлагательства. Например, сигналы от
датчиков критических параметров управляемого оборудования.
Блок последовательного интерфейса (ИПС)
обеспечивает связь данного контроллера с другими ПК или центральной ЭВМ. Он
позволяет организовать работу ПК в составе комплексной системы автоматизации
судна. Наиболее часто в блоке ИПС реализован один из стандартных
последовательных интерфейсов - CL или RS-232С (а также модификации последнего).
Блок параллельного интерфейса на рисунке раскрыт
до уровня принципиальной схемы. Через устройство сопряжения с объектом (УСО) он
обеспечивает связь с управляемым оборудованием (механизмами), а также с пультом
управления (ПУ).
Параллельный интерфейс выполнен на основе БИС
программируемого параллельного интерфейса (ППИ) КР580ВВ55, широко используемой
для этих целей в контроллерах самого разного назначения.
В состав параллельного интерфейса входит также
дешифратор (Д) включающий в работу ППИ, когда МП обращается (т.е. задает адрес)
к какому-либо порту микросхемы. При этом выбор конкретного порта в микросхеме
осуществляется двумя младшими разрядами кода адреса, подаваемыми на входы А0 и
А1 микросхемы с шины адреса.
Направление передачи информации между МП и ППИ
определяется сигналами, поступающими с ШУ на входы RD или WR. При наличии
сигнала RD (чтение) информация из выбранного порта через шину данных передается
от ППИ (с выходов D0 - D7) к МП. При наличии сигнала WR информация от МП
поступает в один из портов ППИ.
Данный контроллер обеспечивает управление 8
механизмами дискретного действия. Для управления используется порт А ППИ, к
каждому из входов которого подключен релейный блок. На рисунке показана схема
релейного блока управления механизмами №1, №4, №6. По существу релейный блок -
это усилитель, обеспечивающий управление маломощным электромагнитным реле К,
контакты которого определенным образом включены в цепь управления собственно
механизма. Такая схема - одна из простейших возможных схем построения УСО,
вместе с тем, она широко применяется. Использование реле обеспечивает
гальваническое разделение схемы ПК (с низковольтным питанием) и схемы собственно
механизма, которая обычно находится под более высоким напряжением постоянного
или переменного тока.
Работает релейный блок следующим
образом. Когда на выходе РА0 микросхемы КР580ВВ55 присутствует сигнал
логического нуля, на базу транзистора VT1 напряжение не подается, он закрыт.
Все напряжение питания  приложено к
транзистору. Напряжение на обмотке реле К1 отсутствует и светодиод VD1,
индицирующий состояние реле, погашен. При появлении логической единицы на выходе
РА0 появляется ток базы VT1, ограничиваемый резистором R2. Транзистор
открывается, обмотка реле запитывается и реле срабатывает, замыкая контакты и
воздействуя таким образом на состояние механизма. Светодиод VD1 начинает
светиться, т.к. он через токоограничивающий резистор R1 подключен параллельно
обмотке реле. Диод VD2 защищает транзистор от перенапряжения, возникающего при
выключении тока через обмотку реле.
приложено к
транзистору. Напряжение на обмотке реле К1 отсутствует и светодиод VD1,
индицирующий состояние реле, погашен. При появлении логической единицы на выходе
РА0 появляется ток базы VT1, ограничиваемый резистором R2. Транзистор
открывается, обмотка реле запитывается и реле срабатывает, замыкая контакты и
воздействуя таким образом на состояние механизма. Светодиод VD1 начинает
светиться, т.к. он через токоограничивающий резистор R1 подключен параллельно
обмотке реле. Диод VD2 защищает транзистор от перенапряжения, возникающего при
выключении тока через обмотку реле.
Пульт управления ПУ содержит кнопку
S1 и резистор R7. В исходном, не нажатом положении, контакт кнопки замкнут и
отсутствие напряжения на ней соответствует сигналу логического нуля. При
нажатии кнопки все напряжение U приложено к S1, что соответствует сигналу
логической единицы. Состояние кнопки в виде сигнала логической единицы или нуля
подается на вход PC1 порта С, который должен быть настроен на ввод, в то время
как порт A работает на вывод. Порт B в данном ПК не используется и его
настройка значения не имеет.
Для отладки контроллера используется
учебный микропроцессорный комплект (УМК) с макетной платой М1, выполняющей
интерфейсную функцию. Схема параллельного интерфейса, УСО и ПУ выполненная на
макетной плате М1, в целом соответствует схеме ПК, за исключением отсутствующих
реле. Выходные сигналы ПК индицируются светодиодами.
На макетной плате заданы М1
следующие адреса портов: порт A - 80H, порт B - 81H, порт C - 82H, регистр
управляющего слова - 83Н.
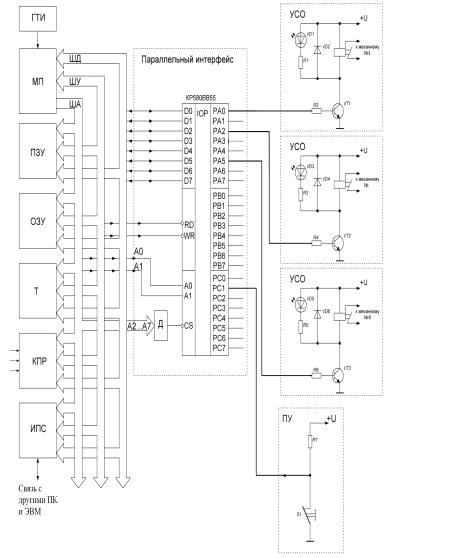
Рис.1 Структурная схема ПК.
3. Характеристики микропроцессорного модуля
«NL-4AO»

Модуль аналогового вывода NL-4AO может быть
использован везде, где
необходимо выполнять автоматическое управление:в доме,офисе, цехе. Однако он
спроектирован специально для использования в промышленности, в жестких условиях
эксплуатации, а также на опасных производствах.
Основным назначением модуля является
преобразование цифр вого кода, поступающего в его порт RS-485, в аналоговый
сигнал напряжения или тока.
Модуль может быть использован для передачи
сигнал а в стандарте
-20 мА, 4-20 мА, 0-5В, а также для управления
различными устройствами с потенциальным или токовым аналоговым входом, для
тестирования радио электронной и электро технической продукции, когда
необходимо задавать аналоговые тестовые воздействия.
Примерами может быть применение модуля для
решения следующих задач:
· Передача сигналов в стандарте 0-20 и 4-20 мА,
а также 0-5В на различные исполнительные устройства;
· тестирование электронной аппаратуры, задание
аналоговых тестовых сигналов в автоматизированных стендах для приемо -сдаточныхи
других испытаний продукции, для диагностик и неисправностей при ремонте;
· измерение вольтамперных характеристик
полупроводниковых приборов;
· компьютерное управление двигателями
постоянного тока.
Модуль может использоваться в сети на основе
интерфейса RS-485, одновременно с модулями других производителей (ADAM, ICP,
NuDAM и др .).
Модуль имеет несколько модификаций: в
дополнительном корпусе со степенью защиты IP65 (для климатических условий
группы C2 по ГО С Т 12997-84) и без него, с разъемом для шины SPI и безнего, с
дисплеем и без.
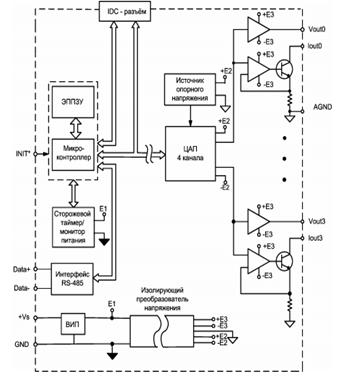
Цифровой сигнал измикроконтроллера поступает в
ЦАП через изолирующий повторитель с магнитной связью. Изолированная часть
модуля, содержащая ЦАП, питается через развязывающий преобразователь
постоянного напряжения, чем обеспечивается полная гальваническая изоляция
выходов от блока питания и интерфейсной части.
В состав модуля входит сторожевой таймер ,
вырабатывающий сигнал сброса, если микроконтроллер перестает вырабатывать
сигнал Host ОК (это периодический сигнал , подтверждающий, что микроконтроллер
не"завис"). Второй сторожевой таймер внутри микроконтроллера
переводит выходы модуля в безопасные состояния ("Safe Value"), если
из управляющего компьютера перестает приходить сигнал "Host О К".
Обычно
безопасными состояниями считаются те, которые
получаются на выходах модуля при отключении питания. Выходам модуля можно
назначить любые состояния, которые в конкретных условиях применения считаются
безопасными.
Схема питания модулей содержит вторичный
импульсный источник питания, позволяющий с высоким к.п.д. преобразовывать
напряжение питания в диапазоне от +10 до +30В в напряжение +5В. Модули содержат
также
изолирующий преобразователь напряжения из+5В в ±15В для питания аналоговой
части. Для питания ЦАП используется линейный стабилизатор напряжения,
преобразующий +15 В в +5 В.
Интерфейс RS-485 выполнен на стандартных
микросхемах фирмы Analog Devices, удовлетворяющих стандартам EIA для интерфейса
RS-485 и имеющих защиту от электро статических зарядов, от выбросов на линии
связи, от короткого замыкания и от перенапряжения. Дополнительно в модуле
использована позисторная защита от перенапряжения на клеммах
порта RS-485. Аналогичная защита использована
для входа источника питания.
Внешние управляющие команды посылаются в модуль
через порт RS-485.
В правом нижнем углу модуля предусмотрен разъем
типа IDC для подключения к модулю внешних плат расширения по шине SPI, ко торый
устанавливается по специальному заказу.
. Укрупнённая блок-схема алгоритма работы ПК
Блок 1: ожидание нажатия кнопки.
Блок 2: запуск 1го и 3го механизма.
Блок 3: задержка на время t.
Блок 4: запуск 6го механизма.
Рис. 4. Блок-схема работы ПК
Процесс выполнения алгоритма.
При запуске программы Блок 1 осуществляет
ожидание нажатия кнопки. После нажатия кнопки блок 2 производит запуск 3-го
1-го механизмов. Блок 3 осуществляет задержку на время t.
Блок 4 производит запуск 6-го механизма.
. Детальная блок-схема алгоритма работы ПК
На рис. 5 показана детальная блок-схема
алгоритма работы ПК.
В блоке 1 задаётся направление работы портов ППИ
КР580ВВ55. Порт А - вывод данных, порт В - вывод данных, разряды РС7-РС4 порта
С - вывод данных, разряды РС3 -РС0 ввод данных.
В блоке 2 в порт А выводятся управляющие
дискретные сигналы РА0=0, РА2=0, PA5=0 которые останавливают механизмы 1, 3 и
6.
В блоках 3 и 4 проверяется состояние кнопки
подключенной к линии РС1 порта С. Программа ожидает её нажатие - непрерывно
осуществляя переход к началу блока 3. С нажатием кнопки РС1 начинает выполнятся
блок 5.
В блоке 5 в порт А выводятся дискретные сигналы
РА0=1, РА2=1, РА5=0 которые запускают механизмы 1 и 3.
Такое состояние сохраняется всё время, пока
выполняется блок 6, в котором реализована задержка времени. По истечении
времени задержки происходит переход к блоку 7.
Блок 7 производит вывод дискретных сигналов
РА0=1, РА2=1, РА5=1. Это приводит к запуску механизма6 и продолжению работы
механизмов 3и1.
На рис. 6 показана блок-схема алгоритма
формирования временной задержки. На рис. 5 он обозначен как единый блок 6.
Задержка времени формируется программно, без использования таймера. Для
создания задержки в программе организуются два вложенных друг в друга цикла. Их
время выполнения зависит от количества проходов циклов, задаваемого числами,
заносимыми в регистры Е, В и С микропроцессора. Программа задержки
осуществляется блоками 8 - 13.
Блок 8 выполняет запись начального числа в
регистр В и С. Затем в блоке 10 производится уменьшение значения на единицу.
Блок 11 содержимое регистров сравнивается с
нулём. Если оно не равно нулю, то повторяется выполнение блока 10 до тех пор,
пока значение регистра не станет нулевым. Затем произойдёт выполнение внешнего
цикла с использованием регистра Е. Далее повторяется выполнение внутреннего
цикла , и так до тех пор пока состояния обоих счётчиков (внутреннего и внешнего
циклов) не станут нулевыми
. Расчёт задержки времени
Время выполнения программы задержки
рассчитывается по формуле:
t=Nвнешн´Nвнутр´Dtвнутр;
Где Dtвнутр- время,
затраченное на один переход во внутреннем цикле.
DCXB выполняется за 5 машинных тактов,А,В - 5
тактов,- 4 такта,DELAY - 10 тактов.
Таким образом, внутренний цикл выполняется за 24
такта. Один такт в УМК длится 0,5 мкс. Поэтому Dtвнутр=24´0,5=12
мкс.
Время полного выполнения внутреннего цикла
составляет:
tвнутр=8333´12=0,1 с.
Чтобы обеспечить задержку времени t=6с,
внешний цикл необходимо повторить 60 раз.
Рис. 5. Блок-схема алгоритма работы ПК

Рис. 6. Блок-схема алгоритма задержки
. Программа работы ПК
|
В
машинных кодах
|
На языке ассемблера
|
|
адрес
|
код
|
метка
|
команда
|
комментарий
|
|
80D
80E
|
3E
81
|
|
MVI
A, 81
|
Загрузка
в аккумулятор управляющего слова КР580ВВ55
|
|
80F
810
|
D3
83
|
|
OUT
83
|
Запись
управляющего слова в регистр управл-го слова КР580ВВ55(адрес 83)
|
|
811
812
|
3E
00
|
|
MVI
A, 00
|
Загрузка
в аккумулятор кода 00
|
|
813
814
|
D3
80
|
|
OUT
80
|
Вывод
содержимого аккумулятора в порт А на индикацию(по адресу 80)
|
|
815
816
|
DB
82
|
M3
|
IN
82
|
|
817
818
|
E6
02
|
|
ANI
02
|
Наложение
маски для выявления разряда аккумулятора
|
|
819
81A 82B
|
CA
A8 09
|
|
JZ
M3
|
Если
разряд нулевой(кнопка отжата), то переход к метке М3. Если разряд=1(кнопка
нажата), то продолжить
|
|
81C
81D
|
3E
04
|
|
MVI
A, 04
|
Загрузка
в аккумулятор кода 04
|
|
81E
81F
|
D3
80
|
|
OUT80
|
Вывод
содержимого аккумулятора в порт А на индикацию(по адресу 80)
|
|
820
821
|
1E
46
|
|
MVI
E, 46
|
Загрузка
счётчика внешних циклов числом 46
|
|
822
823 824
|
01
8D 20
|
BEGIN
|
LXI
B, 208D
|
Загрузка
счётчика внутренних циклов числом 208D
|
|
825
|
0B
|
DELAY
|
DCX
B
|
Декремент
16-ти разрядного счётчика внутреннего цикла
|
|
826
|
78
|
|
MOVA,B
|
Пересылка
содержимого регистра В в аккумулятор
|
|
827
|
B1
|
|
ORA
C
|
Логическое
«или» над содержимым А и С
|
|
828
829 82A
|
C2
B8 09
|
|
JNZ
DELAY
|
Если
счётчик внутренних циклов обнуляется, то продолжать, если нет- переход к
метке DELAY
|
|
82B
|
1D
|
|
DCR
E
|
Декремент
8-ми разрядного счётчика внешних циклов
|
|
82C
82D 82E
|
C2
B5 09
|
|
JNZ
BEGIN
|
Если
счётчик внешних циклов обнуляется, то продолжить, если нет - переход к метке
BEGIN
|
|
82F
830
|
3E
0C
|
|
MVI
A, 0C
|
Загрузка
в аккумулятор кода 0C
|
|
831
832 833
|
D3
80 76
|
|
OUT
80 HLT
|
Запись
кода в порт А КР580ВВ55 (адрес 80) Остановка.
|
Выводы
В результате выполнения курсовой работы
разработана схема интерфейсного блока и программа работы программируемого
контроллера, который управляет двумя судовыми механизмами дискретного действия,
например, насосами, вентиляторами и т.д. Программа отлажена на учебном
микропроцессорном комплекте.
Список использованной литературы
1. Изучение
ввода/вывода дискретных сигналов в МПСУ. Методические указания к л/р №2 по
курсу МПСУ для специальности 18.09., - Новороссийск: НГМА, 2010г.
. Методические
указания к курсовой работе “Программируемый контроллер для управления судовыми
механизмами” по курсу МПСУ для специальности 24.06, - Новороссийск: НГМА,
2009г.
. Изучение
ввода/вывода данных в МПСУ в функции времени. Методические указания к л/р №3 по
курсу МПСУ для специальности 18.09., - Новороссийск: НГМА, 2010г.
. Щелкунов
Н.Н., Дианов А.П. Микропроцессорные средства и системы. - М.: Радио и связь,
2009.
. Микропроцессоры
и микропроцессорные комплекты интегральных микросхем. Справочник. В 2-х томах.
Под ред. Шахнова В.А. - М.: Радио и связь, 2012.