Асинхронный двигатель
Контрольная
работа
Вариант № 23
Содержание
1. Статические и динамические
характеристики нагрузки и их регулирующий эффект. Критерий статической
устойчивости асинхронного двигателя
. Критерий статической устойчивости
узла, содержащего комплексную нагрузку, а также порядок определения запаса
статической устойчивости
Литература
. Статические и динамические характеристики
нагрузки и их регулирующий эффект. Критерий статической устойчивости
асинхронного двигателя
Потребители электрической энергии по-разному
ведут себя при изменении параметров режима: напряжения и частоты системы. Чтобы
получить количественную оценку поведения нагрузки при их изменении введено
понятие характеристики приемника. Под характеристиками приемников понимают
зависимости потребляемых ими активной и реактивной мощностей, вращающего
момента или тока от напряжения или частоты:
, Q, M = f(U) или
P, Q, M = j(f) . (1)
Различают два вида характеристик - статические и
динамические.
Статической характеристикой называется зависимость
мощности, момента или тока от напряжения или частоты, снятая при медленных
изменениях режима, при котором можно считать каждую её точку, соответствующей
установившемуся режиму. Например, P=f(U), Q= f(U), P= j(f)
Q= j
(f) и т,д.
Динамической называется та же зависимость, но
снятая при быстрых изменениях режима, с учетом скорости изменения параметров во
времени
Р = j(U, f ,  ,
,  ,
, , …) и т.д. (2)
, …) и т.д. (2)
Рассмотрим некоторые статические и
динамические характеристики элементов нагрузки.
а) Осветительная нагрузка.
Активная мощность, потребляемая осветительной
нагрузкой, содержащей лампы накаливания, не зависит от частоты и примерно
пропорциональна квадрату напряжению:
 ; (3)
; (3)
= величина, считающаяся постоянной,
но в принципе зависит от температуры материала. Реактивной мощности
осветительная нагрузка не потребляет. Активная мощность, потребляемая
люминесцентными лампами, зависит от частоты (уменьшаясь на 0,5¸0,8%) с
изменением частоты.
величина, считающаяся постоянной,
но в принципе зависит от температуры материала. Реактивной мощности
осветительная нагрузка не потребляет. Активная мощность, потребляемая
люминесцентными лампами, зависит от частоты (уменьшаясь на 0,5¸0,8%) с
изменением частоты.
Рис. 1. Статическая характеристика осветительной
нагрузки
В графике (рис 1) представлены характеристики
Р=f (U) нагрузки, состоящей из ламп накаливания:
1 - потребляемая активная мощность
при постоянном сопротивлении нагрузки Rн= соnst ;
соnst ;
- то же c учетом изменения активного
сопротивления R=j(U) в
результате нагревания материала провода.
При одном и том же напряжении
потребляемая нагрузкой мощность уменьшается, если учесть увеличение
сопротивления в результате нагревания.
Динамические характеристики
осветительных установок при анализе электромеханических переходных процессов
принимаются совпадающими с их статическими характеристиками.
б) Асинхронная нагрузка и критерий
ее устойчивой работы.
Асинхронный двигатель как нагрузка
потребляет как активную, так и реактивную мощность. Условно можно считать, что
активная мощность идет на создание вращающего момента, а реактивная - на
создание магнитного поля машины. Наличие вращающейся части - ротора требует
совместного изучения и электромагнитного и механического процессов в двигателе.
Поэтому скольжение асинхронного двигателя, являясь комплексным параметром
машины, характеризует машину и в статических, и в динамических режимах.
Статические и динамические характеристики асинхронной нагрузки различны. Это
различие обусловлено появлением свободных токов при быстром изменении
скольжения двигателя.
Сначала рассмотрим статические
характеристики асинхронного двигателя, а динамические характеристики в
последующих разделах.
Воспользуемся упрощенной Г-образной
схемой замещения асинхронного двигателя. При этом потери в статоре относим к
сети. Не учитываются также потери активной мощности, связанные с
намагничиванием стали.
Рис.2. Г-образная схема замещения асинхронного
двигателя.
нагрузка асинхронный двигатель
статический
XS - сопротивление рассеяния статора
и ротора, R/S - приведенное активное сопротивление обмотки ротора, S= -
скольжение, wо,wР - синхронная и рабочая
угловые скорости ротора, Xm
- сопротивление ветви намагничивания.
-
скольжение, wо,wР - синхронная и рабочая
угловые скорости ротора, Xm
- сопротивление ветви намагничивания.
Обычно для мелких и средних
асинхронных двигателей S=0,03¸0,05,
а для крупных асинхронных двигателей S=0,01.
Потребляемую двигателем активную мощность можно
определить, исходя из схемы замещения:
Р=I2 (4)
(4)
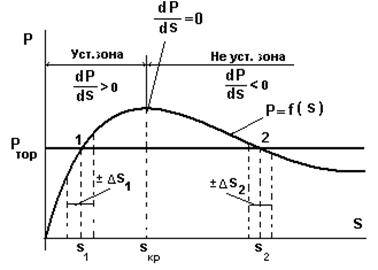
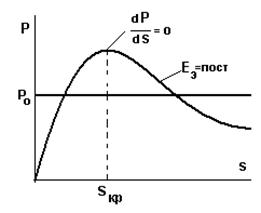
Рис.3. Электромагнитный вращающий
момент асинхронного двигателя.
Построение характеристики P=f(S)
даёт зависимость вида, представленного на рис. 3. Обычно эта характеристика
дополняется тормозной характеристикой рабочего механизма Pтор. Как
известно , дифференциальное уравнение асинхронного двигателя имеет вид:
 ; (5)
; (5)
где TD -
постоянная инерция двигателя совместно с рабочим механизмом, Р, РТ- вращающий
момент двигателя и тормозной момент рабочего механизма. Рассмотрим условия
устойчивой работы асинхронного двигателя. Основным условием установившегося
режима является равенство вращающего (двигатель) и тормозного (рабочий
механизм) моментов на валу Р=РТ.
Тогда
 , (6)
, (6)
т.е. S= пост. и характеризует
установившийся режим работы с неизменным скольжением.
Предположим, что в точке 1
скольжение получает приращение  1. (рис. 3). При положительном
приращении скольжения
1. (рис. 3). При положительном
приращении скольжения  вращающий
момент двигателя Р становится больше, чем тормозной момент рабочего механизма
Р>PТ и DР=Р-РТ>0,
т.е избыточный момент на валу имеет вращающий характер, под действием которого
ротор ускоряется, скольжение уменьшается и режим возвращается в точку 1. Если
же в этой точке приращение скольжения отрицательное -DS1, то вращающий момент
двигателя Р становится меньше тормозного момента рабочего механизма Р<PТ и DР=Р-РТ<0 , т.е избыточный
момент на валу носит тормозной характер, скорость ротора уменьшается и
скольжение растет и режим двигателя возвращается в точку 1.
вращающий
момент двигателя Р становится больше, чем тормозной момент рабочего механизма
Р>PТ и DР=Р-РТ>0,
т.е избыточный момент на валу имеет вращающий характер, под действием которого
ротор ускоряется, скольжение уменьшается и режим возвращается в точку 1. Если
же в этой точке приращение скольжения отрицательное -DS1, то вращающий момент
двигателя Р становится меньше тормозного момента рабочего механизма Р<PТ и DР=Р-РТ<0 , т.е избыточный
момент на валу носит тормозной характер, скорость ротора уменьшается и
скольжение растет и режим двигателя возвращается в точку 1.
Теперь предположим, что скольжение
получает приращение в точке 2. Если это приращение положительное, т.е. S2=S2+DS, как видно из рис. 3,
вращающий момент двигателя Р становится меньше тормозного момента рабочего
механизма PT и DР=Р-РТ<0 на валу
преобладает тормозной момент, под действием которого ротор тормозится,
скольжение увеличивается, что приводит к дальнейшему уменьшению вращающего
момента двигателя Р и т.д. Наблюдается непрерывный уход от точки 2. Если
приращение получилось отрицательным, т.е S2=S2-DS, то это приводит к увеличению вращающего
момента двигателя Р над тормозным РТ и DР=Р-РТ>0,
под действием которого ротор ускоряется, скольжение уменьшается, а это приводит
к дальнейшему повышению электромагнитной мощности двигателя Р и режим идет в
направлении точки 1. Другими словами, и в этом случае наблюдается уход от точки
установившегося режима.
Таким образом, при малом приращении
в точке 1 режим возвращается в исходную точку, а такое же приращение в точке 2
приводит к непрерывному удалению от этой точки. Следовательно, точка 1 является
точкой устойчивой работы, а точка 2 - точкой неустойчивой работы двигателя.
Максимум мощности (момента) развиваемый
двигателем, можно найти, продифференцировав выражение мощности по скольжению и
приравняв нулю 
 ;
;
 ;
;
 ;
;  ; (7)
; (7)
это значение скольжения называют
критическим и обозначают
 ,
,
а максимум характеристики,
соответствующей этому значению скольжения, можно найти, подставляя  в (4):
в (4):
Таким образом, максимум мощности
двигателя равен
 . (8)
. (8)
Интервал изменения скольжения от
нуля до критического  является
интервалом устойчивой работы, а интервал S>Sкр неустойчивым. Максимум
характеристики P=f(S) определяется критическим скольжением Sкр. Двигатель
работает устойчиво, если выполняется условие
является
интервалом устойчивой работы, а интервал S>Sкр неустойчивым. Максимум
характеристики P=f(S) определяется критическим скольжением Sкр. Двигатель
работает устойчиво, если выполняется условие  Таким образом, критерий
устойчивости работы асинхронного двигателя определяется соотношением
Таким образом, критерий
устойчивости работы асинхронного двигателя определяется соотношением
 . (9)
. (9)
Необходимо отметить, что критическое
скольжение от напряжения не зависит, а зависит только от параметров самой
машины
В соответствии с электромагнитной
характеристикой двигателя P=f(S) при снижении напряжения её максимум
уменьшается пропорционально квадрату напряжения, причем при одном и том же
критическом скольжении. Рабочее скольжение двигателя растет и соответственно
скорость вращения уменьшается.
Рис.4. Изменение вращающего момента
двигателя при изменении напряжения на шинах машины.
Напряжение, при котором максимум
электромагнитной мощности двигателя равен тормозной мощности рабочего
механизма, называют критическим напряжением Uк . Этой точке соответствует точка
4 на графике P=f(S) (рис.4) и U4=Uкр на графике S=f(U) (рис.5).
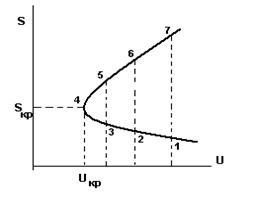
Рис.5. Определение критического
скольжения и напряжения асинхронного двигателя
Дальнейшее уменьшение напряжения
приводит к остановке двигателя, так как вращающий момент, развиваемый
двигателем, меньше тормозного момента двигателя.
Можно найти реактивную мощность,
потребляемую асинхронным двигателем. Из схемы замещения (рис.2.) видно, что
реактивная мощность состоит из 2-х составляющих
å=Qm+QS
, (10)
где  - намагничивающая реактивная
мощность, связанная с намагничивающим током, где Im = (0,2¸0,6)IН - ток
холостого хода, зависящий от мощности и скорости вращения двигателя, IН -
номинальный ток двигателя; QS=I2×XS - мощность рассеяния, связанная с созданием
полей рассеяния статора и ротора.
- намагничивающая реактивная
мощность, связанная с намагничивающим током, где Im = (0,2¸0,6)IН - ток
холостого хода, зависящий от мощности и скорости вращения двигателя, IН -
номинальный ток двигателя; QS=I2×XS - мощность рассеяния, связанная с созданием
полей рассеяния статора и ротора.
Выше было показано, что скольжение
пропорционально квадрату тока SºI2
при постоянном моменте сопротивления на валу. Проведя аналогию, следует
отметить, что так как реактивная мощность QS пропорциональна квадрату тока, то
можно считать, что зависимости Qs=f(U) и S=f(U)
аналогичны и будут отличаться только масштабом. Исходя из этого, можно
построить Qå=f(U) при
постоянстве частоты f = пост (рис.6)
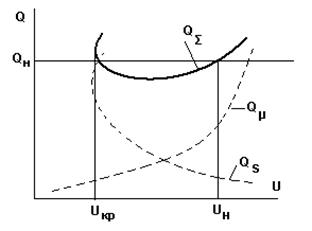
Рис.6. Характеристика реактивной
мощности, потребляемой асинхронным двигателем в зависимости от напряжения.
Можно также построить характеристику
реактивной мощности, потребляемой асинхронным двигателем в зависимости от
частоты f при U=пост и постоянном моменте сопротивления рабочего механизма. Так
как SºI2, то
очевидно, что Qsºf2, т.е
пропорционален квадрату частоты, а намагничивающая мощность увеличивается с
уменьшением частоты Qm=
 (рис.7)
(рис.7)
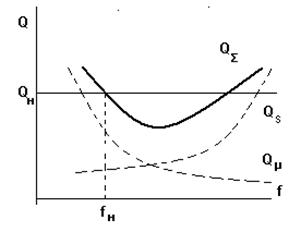
Рис. 7. Характеристика реактивной
мощности, потребляемой асинхронным двигателем в зависимости от частоты.
Регулирующий эффект нагрузки по
частоте и напряжению
При изменении напряжения и частоты в
электрической системе изменяются потребляемая активная и реактивная мощности
нагрузкой.
Изменение режима по напряжению в
узлах системы связано с изменениями потоков активной и реактивной мощности и
потерь в элементах электрической системы и, так как перетоки различны, то будут
также отличаться уровни напряжений в узлах электрической системы.
Восстановление напряжения связано с балансом реактивной мощности, источниками
которой являются синхронные генераторы и компенсаторы различной конструкций,
синхронные двигатели, статические источники реактивной мощности,
устанавливаемые в узлах нагрузки, вдоль линий электропередач и т.д.
Изменение частоты связано с
нарушением баланса активной мощности в электрической системе. Этот баланс нарушается
в тех случаях, когда присоединенная к системе активная нагрузка потребителей не
соответствует располагаемой активной мощности электрических станций. При этом
изменение частоты происходит одновременно и, одинаково по всей электрической
системе. В результате действия регуляторов скорости наступает новое равновесие
(баланс) между выработкой и потреблением активной мощности.
Необходимо отметить, что если новое
значение частоты будет отличаться от исходной, например, уменьшаться, то это
приведет и к снижению напряжения, так как будет расти потребление реактивной
мощности в системе.
При изменении режима, например,
уменьшении напряжения U или частоты f у одних
потребителей потребляемая мощность увеличивается, у других, наоборот,
снижается.
Изменение мощности, потребляемой
нагрузкой, при перемене напряжения U или частоты
f называют
регулирующим эффектом нагрузки соответственно по напряжению или частоте и
математически выражают в виде:
 (11)
(11)
где dP/dU, dP/df, dQ/dU, dQ/df -
регулирующие эффекты по напряжению и частоте, характеризуют реакцию нагрузки на
изменения параметров режима (так как производную определяют только для одного
параметра при постоянстве другого, впредь будем считать  и т.д., где
П - параметр режима).
и т.д., где
П - параметр режима).
Чем больше значение производной, тем
резче меняется мощность, потребляемая нагрузкой при изменении напряжения или
частоты.
Если при снижении U или f потребление
Р и Q уменьшится,
то регулирующий эффект называется положительным, в противном случае
регулирующий эффект отрицательный.
. Критерий статической устойчивости узла,
содержащего комплексную нагрузку, а также порядок определения запаса
статической устойчивости
Ранее мы рассмотрели зависимости потребления
мощности от напряжения одиночной нагрузки U.
Но обычно от некоторого электрического узла питаются не одиночные потребители,
а ряд потребителей, причем в состав этих потребителей входят и вращающиеся
машины. Наличие вращающейся машины, главным образом асинхронных двигателей,
вносит изменения на протекание переходных процессов и может привести к
неустойчивости всей комплексной нагрузки.
Обычно асинхронные двигатели имеют
большие запасы устойчивости: отношение максимального вращающего момента к
рабочему составляет  и,
следовательно, небольшое снижение напряжения не может повлиять на их устойчивую
работу. Все это относится к единичному двигателю, получающему питание от
источника напряжения, которое не зависит от режима двигателя.
и,
следовательно, небольшое снижение напряжения не может повлиять на их устойчивую
работу. Все это относится к единичному двигателю, получающему питание от
источника напряжения, которое не зависит от режима двигателя.
Если двигатель или группа двигателей
питается от генератора соизмеримой мощности и, следовательно, напряжение на
шинах нагрузки зависит от режима, то картина устойчивости меняется. Рассмотрим
схему, в которой в конце передачи имеется узел комплексной нагрузки.
Предположим, что нагрузка представлена эквивалентным двигателем.
Eq2
Uг
Eq
Uг
U XSэ
R2
S
Рис.8. Расчет узла комплексной нагрузки.
Нагрузка представлена эквивалентным двигателем.
Очевидно, что максимум мощности характеристики
эквивалентного двигателя P=f(S)
должен быть определен, исходя из постоянства напряжения той точки, где
напряжение считается постоянным. Максимумы мощностей определим из соотношения:
 , (12)
, (12)
где: XSэ=Xd+Xc+Xs, Xc=XT1+XЛ+XT2 -
суммарное эквивалентное сопротивление и сопротивление системы. Расчеты проведем
при условии, что вся нагрузка заменена одним эквивалентным двигателем, а
генераторы отправного конца - одним эквивалентным генератором. Сравним
максимумы характеристик эквивалентного двигателя при условии постоянства
напряжений в разных точках (рис 9):
напряжение на шинах двигателя
=пост. ,  ; (13)
; (13)
напряжение на шинах генератора
Г=пост., (14)
(14)
переходная э.д.с.
'=пост. ,  (15)
(15)
э.д.с. холостого хода.
Eq=пост., (16)
(16)
Очевидно, что выполняются условия:
>Pm2>Pm3>Pm4кр1>
Sкр2>
Sкр3>
Sкр4
(17)
при одновременном увеличении
рабочего скольжения.
Наибольший запас устойчивости
обеспечивается при постоянстве напряжения на шинах двигателя, а наибольшая
опасность опрокидывания двигателя при Eq=пост., так
как  имеет
наименьшее значение, хотя условие устойчивости
имеет
наименьшее значение, хотя условие устойчивости  выполняется.
выполняется.
Из характеристик видно, что
опрокидывание двигателя может произойти из-за незначительного изменения
напряжения нагрузки. Поэтому при соизмеримых мощностях генераторов и двигателей
необходимо расчет произвести исходя не из напряжения на зажимах двигателя, а из
постоянства тех э.д.с генераторов, которые в данных условиях постоянны. Эта
э.д.с. разная при различных регулированиях возбуждения синхронных генераторов:
Рис. 9. Электромагнитная характеристика
эквивалентного и синхронного двигателя в зависимости от постоянства напряжения
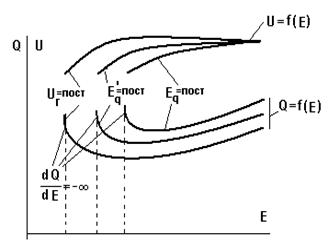
Рис. 10. Характеристики узла
комплексной нагрузки при постоянстве напряжений в различных точках.
Eq=пост., XГ =Хd
-отсутствует АРВ,
E'q»E'=пост.,XГ =Х'd - АРВ
пропорционального типа,
Uг=пост. ХГ
=0 - АРВ сильного действия.
Из построенных характеристик видно
(рис.10), что с уменьшением э.д.с. в области, где  отрицателен,
происходит прогрессирующее увеличение потребления реактивной мощности, что
может привести к лавине напряжения, если не принять соответствующих мер.
отрицателен,
происходит прогрессирующее увеличение потребления реактивной мощности, что
может привести к лавине напряжения, если не принять соответствующих мер.
Для расчета режимов системы,
имеющего различного рода потребители, а узлы комплексной нагрузки являются
таковыми, определение параметров эквивалентного двигателя является трудной
задачей, поэтому пользоваться критерием устойчивости единично работающего
двигателя  не всегда
оправдано. Для определения условий устойчивости в данном случае рассмотрим узел
комплексной нагрузки.
не всегда
оправдано. Для определения условий устойчивости в данном случае рассмотрим узел
комплексной нагрузки.
Пусть нагрузки даны со своими
статическими характеристиками PН=f(U) QН=f(U), а
генераторы эквивалентной э.д.с. Eэ и Qэ -
внутренней эквивалентной реактивной мощностью. При этих условиях мы можем
построить зависимость эквивалентной э.д.с. от напряжения узла Eэ=f(U).
Eэ Xэ
PэQэ
U
PH=f(u)
QH=f(u)
Рис.11 Схема замещения эквивалентной нагрузки
Зададимся различными значениями напряжения на
шинах комплексной нагрузки и для каждого значения Ui
определим активные Pi
и реактивные мощности Qi
, потребляемые каждой нагрузкой по их статическим характеристикам и в целом
узлом комплексной нагрузки. Далее определим значение эквивалентной э.д.с. Eэ
для фиксированной Ui.
При этом могут быть два варианта.
если заданы активная и реактивная мощности
нагрузки, то
 (18)
(18)
если же заданы Pэ и Qэ, Eэ, то можем
определить напряжение на шинах нагрузки:
 (19)
(19)
Далее можем построить требуемую
характеристику Eэ=f(U). В точке
минимума этой характеристики  , и напряжение в этой точке
соответствует критическому напряжению Uкр(на рис
12а).Здесь же даны эквивалентные условия устойчивости нагрузки.
, и напряжение в этой точке
соответствует критическому напряжению Uкр(на рис
12а).Здесь же даны эквивалентные условия устойчивости нагрузки.
в)
Рис.12. Равноценные критерии
устойчивости нагрузки:
а) зависимость эквивалентной э.д.с.
от напряжения нагрузки Еэ=f (U),
б) зависимость реактивной мощности
от эквивалентной э.д.с. Q=f(Eэ),
в) характеристика одиночного
асинхронного двигателя.
Баланс реактивной мощности в
электрической системе определяется равенством вырабатываемой источниками
реактивной мощности (СГ, СК, конденсаторы и т.д.) и потребляемой нагрузкой Dq= QåГ - QåН=0, где QåН- содержит
также потери реактивной мощности в элементах электрической сети.
Нарушение этого баланса приводит к
изменению напряжения в узлах электрической системы и влияет на
производительность электрических двигателей рабочих механизмов.
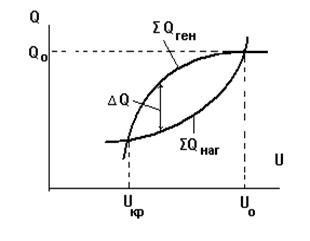
Рис.13. Баланс реактивной мощности и
устойчивости узла комплексной нагрузки.
Из построенного графика видно
(рис.13.), что в диапазоне изменения напряжения от UН до Uкр
рассматриваемый баланс DQ>0, т.е.
вырабатываемый источниками реактивная мощность больше потребляемой нагрузки и
поэтому уменьшение напряжения приводит к увеличению разности DQ. Поэтому
это условие может быть рассмотрено как условие устойчивости по напряжению узла
комплексной нагрузки. Критерием устойчивости является выражение 
Коэффициент запаса, как для этой
характеристики, так и для характеристики узла комплексной нагрузки Eэ=f(U),
определяют как:
 (20)
(20)
Его величина для нормального режима
(15÷20)
% и
для послеаварийного режима (5÷10)%.
Обычно для повышения коэффициента
мощности нагрузки у её шин устанавливают статические конденсаторы, тем самым
уменьшив приток реактивной мощности от системы. При этом также снижаются потери
в электрических сетях. Однако такая мера приводит к уменьшению вырабатываемой
генератором реактивной мощности и соответственно его э.д.с., что отрицательно
влияет на коэффициент запаса устойчивости системы. Резко увеличивается значение
критического напряжения Uкр и создаются условия для
возникновения лавины напряжения.
Исправить это положение можно,
применяя соответствующее АРВ в синхронных генераторах и синхронных
компенсаторах, синхронных двигателях, если они установлены в узлах нагрузки или
системе в целом.
Таким образом, мы получили три
условия устойчивости нагрузки, которых иногда называют практическими критериями
 (21)
(21)
равноценные между собой и все они связаны
с уровнем напряжения на шинах асинхронного двигателя или узла комплексной
нагрузки. Все эти критерии связаны с опрокидыванием асинхронного двигателя
(остановом) и возникновением лавины напряжения.
Регулирующий эффект по напряжению
комплексной нагрузки составляет 1,5¸3,5 для реактивной мощности и 0,3¸0,75 для
активной мощности. Регулирующий эффект комплексной нагрузки по частоте
составляет 1,5¸3 для
активной и реактивной мощности от 1 до 5¸6.
Из проведенного анализа следует, что
процессы в узлах комплексной нагрузки в основном зависят от процессов,
происходящих в асинхронном двигателе или групп двигателей. Нарушение
устойчивости работы асинхронного двигателя может привести к нарушению
устойчивости в целом узла нагрузки в виде лавины напряжения. Тяжелые условия
работы узлов нагрузки возникают в случаях, когда они оказываются в
электрическом центре качений системы или вблизи от него. Во избежание нарушения
устойчивости в узлах нагрузки в нормальных условиях их работы должны быть
обеспечены резервы по активной, в особенности, по реактивной мощности. В этих
целях установка в синхронных генераторах и двигателях современных АРВ и
подключение синхронных компенсаторов и регулируемых статических источников
реактивной мощности отвечают этому требованию.
Литература
1. К.Р. Аллаев Электромеханические переходные
процессы. -Т.: ТашГТУ, 2008. - 287 с.
2.
Автоматизация диспетчерского управления в электроэнергетике. Под ред. Ю.Н.
Руденко.- М.: МЭИ, 2010.- 646 с.
.
В. А. Веников «Электромеханические переходные процессы» М.: 2005.
.
П.С. Жданов Вопросы устойчивости электрических систем. М.: Энергия, 2009. - 456
с.
.
Федорченко А. А. Электротехника с основами электроники : учеб. для учащ. проф.
училищ, лицеев и студ. колледжей / А. А. Федорченко, Ю. Г. Синдеев. - 2-е изд.
- М. : Дашков и К°, 2010. - 415 с.
.
Катаенко Ю. К. Электротехника : учеб. пособие / Ю. К. Катаенко. - М. : Дашков и
К° ; Ростов н/Д : Академцентр, 2010. - 287 с.
.
Москаленко В.В. Электрический привод : Учеб. пособие для сред. проф.
образования / В.В. Москаленко. - М. : Мастерство, 2000. - 366 с.
.
Савилов Г.В. Электротехника и электроника : курс лекций / Г.В. Савилов. - М. :
Дашков и К°, 2009. - 322 с.