GSM–контроллер
Введение
Целью курсовой работы на тему «GSM -
контроллер» является подтверждение ранее полученных теоретических знаний в
процессе обучения и углубления знаний по предмету, она должна быть достигнута с
помощью поставленных задач:
- электрическая
принципиальная схема «GSM - контроллер»;
- расчет
цепи схемы;
- программирование
микроконтроллера;
- произвести
расчет надежности системы.
1.
Общая часть
1.1 Общие сведенья о микропроцессорных системах
Микропроцессорная система -
представляет собой функционально законченное изделие, состоящее из одного или
нескольких устройств, главным образом из микропроцессора и / или
микроконтроллера.
Структура микропроцессорной системы
(МПС) является магистрально - модульной. В такой структуре имеется группа
магистралей (шин), к которым подключаются различные модули (блоки),
обменивающиеся между собой информацией по одним и тем же шинам поочередно, в
режиме разделения времени.
Типичная микропроцессорная система
работает с помощью шин, по которым в систему передаются адреса модулей, к
которым обращается микропроцессор. В шину включен шинный формирователь (ШФ),
обеспечивающий работу микропроцессора (МП) на нагрузку, образуемую внешними
цепями. Собственной нагрузочной способности у выводов МП, как правило, не
хватает.
Микропроцессор - процессор
(устройство, отвечающее за выполнение арифметических, логических операций и
операций управления, записанных в машинном коде), реализованный в виде одной
микросхемы или комплекта из нескольких специализированных микросхем (в отличие
от реализации процессора в виде электрической схемы на элементной базе общего
назначения или в виде программной модели).
PIC - микроконтроллеры Гарвардской архитектуры, производимые
американской компанией Microchip Technology Inc. Аббревиатура PIC, расшифровывается как Peripheral Interface Controller - периферийный интерфейсный контроллер.
Изначально PIC предназначались для
расширения возможностей ввода-вывода 16-битных микропроцессоров CP1600.
Фирма Microchip на данный момент
выпускает широкий спектр 8-и, 16-и и 32-битных микроконтроллеров с внутренним
ПЗУ, ОЗУ, таймерами, АЦП, ШИМ и другими периферийными модулями под маркой PIC. Самые маленькие это PIC10 -3-6 вывода, PIC12 - 8 выводов, PIC16 - 14-68 выводов, PIC17 - 40-84 вывода, PIC18 - 28-84 вывода, dsPIC30 - 28-64 вывода, rfPIC12 - 18-20 выводов, со
встроенным радиоканалом. Каждое семейство имеет свое назначение и область
применения.
PIC 16F628A мощный (200 наносекунд исполнения инструкции), но простой в
программе (только 35 одно слово, в инструкции) CMOS на основе FLASH 8-разрядный
микроконтроллер пакеты Microchip мощный PIC системах ia в 18-выводном корпусе, и обратно-совместимый с PIC16F628, PIC16C62XA, PIC16C5X и PIC12CXXX устройств. В PIC16F628A особенности 4MHz внутренний генератор,
128 байт EEPROM памяти данных, захвата / сравнения/ШИМ, USART, 2 компаратора и
программируемый источник опорного напряжения, что делает его идеальным как для
аналоговых / интегрированный уровень приложений в автомобильной, промышленной,
бытовой техники и потребительских приложений.

Рисунок 1. Микроконтроллер PIC
16F628A
1.2
Архитектура микроконтроллера PIC 16F628A
Характеристика RISC ядра:
- тактовая
частота от DC до 20МГц;
- поддержка
прерываний;
- 8-уровневый
аппаратный стек;
- прямая,
косвенная и относительная адресация;
- 35
однословных команд;
- все
команды выполняются за один машинный цикл, кроме команд ветвления и условия с
истинным результатом.
Особенности микроконтроллеров:
- внешний
и внутренний режимы тактового генератора;
- прецизионный
внутренний генератор 4 МГц,
- нестабильность
+/ - 1%;
- энергосберегающий
внутренний генератор 37 кГц;
- режим
внешнего генератора для подключения кварцевого или керамического резонатора;
- режим
энергосбережения SLEEP;
- программируемые
подтягивающие резисторы на входах PORTB;
- сторожевой
таймер WDT с отдельным генератором;
- режим
низковольтного программирования;
- программирование
на плате через последовательный порт (ICSP) (с использованием двух выводов);
- защита
кода программы;
- сброс
по снижению напряжения питания BOR;
- сброс
по включению питания POR;
- таймер
включения питания PWRT и таймер запуска генератора OST;
- широкий
диапазон напряжения питания от 2.0В до 5.5В;
- промышленный
и расширенный температурный диапазон;
- высокая
выносливость ячеек FLASH/EEPROM;
- 100
000 циклов стирания /записи FLASH памяти программ;
- 1
000 000 циклов стирания /записи EEPROM памяти данных;
- период
хранения данных FLASH/EEPROM памяти > 100 лет.
Характеристики пониженного
энергопотребления:
- режим
энергосбережения: 100нА @ 2.0В (тип.);
- режимы
работы:
- 12мкА
@ 32кГц, 2.0В (тип.);
- 120мкА
@ 1МГц, 2.0В (тип.);
- генератор
таймера TMR1:
- 1.2мкА,
32кГц, 2.0В (тип.);
- сторожевой
таймер:
- 1мкА
@ 2.0В (тип.);
- двухскоростной
внутренний генератор:
- выбор
скорости старта 4МГц или 37кГц;
- время
выхода из SLEEP режима 3 мкс @ 3.0В (тип.)
2.
Специальная часть
2.1
Принцип работы GSM-контроллера
«GSM-контроллер» - глобальный
стандарт цифровой мобильной сотовой связи, с разделением каналов по времени
(TDMA) и частоте (FDMA). Разработан под эгидой Европейского института
стандартизации электросвязи (ETSI) в конце 1980-х годов.относится к сетям
второго поколения (2 Generation) (1G - аналоговая сотовая связь, 2G - цифровая
сотовая связь, 3G - широкополосная цифровая сотовая связь, коммутируемая
многоцелевыми компьютерными сетями, в том числе Интернет). Сотовые телефоны
выпускаются для 4 диапазонов частот: 850 МГц, 900 МГц, 1800 МГц, 1900 МГц [1].
В зависимости от количества
диапазонов, телефоны подразделяются на классы и вариацию частот в зависимости
от региона использования:
- однодиапозонные
- телефон может работать в одной полосе частот. В настоящее время не
выпускаются, но существует возможность ручного выбора определённого диапазона
частот в некоторых моделях телефонов, например Motorola C115, или с помощью
инженерного меню телефона.
- двухдиапазонные
(Dual Band) - для Европы, Азии, Африки, Австралии 900/1800 и 850/1900 для
Америки и Канады.
- трёхдиапазонные
(Tri Band) - для Европы, Азии, Африки, Австралии 900/1800/1900 и 850/1800/1900
для Америки и Канады.
- четырех
диапазонные (Quad Band) - поддерживают все диапазоны 850/900/1800/1900.
В стандарте GSM применяется
GMSK-модуляция с величиной нормированной полосы ВТ - 0,3, где В-ширина полосы
фильтра по уровню минус 3 дБ, Т - длительность одного бита цифрового
сообщения.на сегодняшний день является наиболее распространённым стандартом
связи. По данным ассоциации GSM (GSMA) на данный стандарт приходится 82%
мирового рынка мобильной связи, 29% населения земного шара использует
глобальные технологии GSM. В GSMA в настоящее время входят операторы более чем
210 стран и территорий.
2.2
Программирование GSM-контроллера
Многие микропроцессоры имеют
мультиплексируемую шину адресов / данных. Применение мультиплексируемых шин позволяет
уменьшить число внешних выводов кристалла. В этом случае разрядность адресной
шины сокращается вдвое, и по ней в систему передается только старший полуадрес.
GSM-микроконтроллеры предоставляют пользователю несколько различных интерфейсов
для программирования. Это последовательное программирование при высоком
напряжении, последовательное программирование при низком напряжении через SPI,
параллельное программирование при высоком напряжении и программирование по
интерфейсу JTAG. Первый тип программирования встречается только в моделях AVR
семейства ATtiny, последний - доступен некоторым моделям старшего семейства.
Модели ATmega с наиболее развитой периферией могут поддерживать до трех
различных интерфейсов программирования. Подавляющее большинство AVR-микроконтроллеров
обладают также способностью самопрограммирования, благодаря чему содержимое
памяти программ можно модифицировать непосредственно из пользовательской
программы. Кроме этого FLASH-память может быть перепрограммирована в режиме
отладки через однопроводной интерфейс dW, имеющийся в ряде моделей ATmega и во
всех новых моделях ATtiny.
Интерфейс JTAG очень удобно
использовать в тех случаях, когда необходимо вести программирование и отладку в
одном цикле разработки. К сожалению JTAG имеется далеко не во всех моделях AVR,
а фирменные программаторы стоят значительных денег.
Низковольтное последовательное
программирование через SPI, наиболее распространено. Это способ стоит признать
основным при программировании AVR-микроконтроллеров. Эго поддерживают все
модели с ядром AVR, за исключением двух устаревших представителей младшего
семейства ATtiny11x и ATtiny28x. В данном разделе будет приведено описание двух
программаторов работающих в подобном режиме. Первый из них можно рекомендовать
для быстрого старта. Он имеет простую конструкцию и работает под управлением
популярной радиолюбительской программы PonyProg2000. Второй, намного более
совершенный, является функциональным аналогом AVR ISP фирмы ATMEL. Этот
программатор интегрируется с IDE AVR Studio и позволяет реализовать алгоритмы
программирования с максимально возможной точностью.
2.3
Особенности последовательного программирования
Для взаимодействия программатора с
микроконтроллером при последовательном низковольтном программировании
используется аппаратный модуль SPI. Это очень практичное решение, позволяющее
использовать минимальное число выводов и изменять алгоритмы работы устройства
предварительно запаянного на плату. В виду последней причины программирование
через SPI называют также еще внутрисхемным программированием или ISP (In System
Programming).
Внутрисхемное программирование
потребует задействовать у микроконтроллера в общей сложности 5 выводов. Это 3
линии модуля SPI (MISO, MOSI, SCK), вывод RESET и общий провод GND. В моделях
семейства ATmega, имеющих на борту 64 и более кбайт FLASH-памяти, вместо MISO,
MOSI используются выводы PDO и PDI, соответственно. В случае если программатор
и микроконтроллер получают питание од одного источника, то дополнительно
понадобится также вывод VCC, соединяющий шины питания. Перевод микроконтроллера
в режим программирования осуществляется подачей низкого логического уровня на
линию RESET. Длина шлейфа, соединяющего программатор с устройством, не должна
превышать 15…20 см.
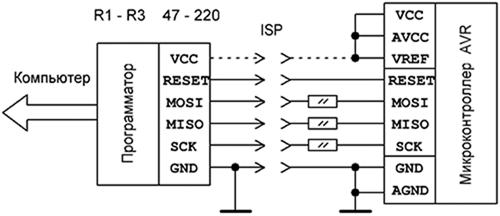
Рисунок 2. Схема подключения
программатора при внутрисхемном программировании одного микроконтроллера
На рисунки 2 показана схема
соединения программатора с AVR-микроконтроллером, при программировании через
ISP. Для более надежной работы последовательно линиям MISO, MOSI, SCK
рекомендуется включать сопротивления небольшого номинала. Напряжение питания
программатора и устройства не должно иметь больших различий. Внутрисхемное
программирование двух и более микроконтроллеров также возможно (рис. 1б). В
этом случае необходимо помнить об одном важном условии: в момент
программирования на шине должен находиться только один активный
микроконтроллер. Поэтому при проектировании платы заранее нужно предусмотреть
переключатели (джампера J1, J2 на рис. 1б), с помощью которых можно выборочно
подавать напряжение на каждый программируемый микроконтроллер. После
программирования модуль SPI или линии ввода-вывода, совпадающие с MISO, MOSI и
SCK, могут быть использованы по своему прямому назначению.
При внутрисхемном программировании
для чтения и записи доступны FLASH-память программ, EEPROM-память данных, биты
защиты и управляющие FUSE-биты. Кроме этого могут быть считаны калибровочные
ячейки и ячейки идентификатора.

Рисунок 3. Схема подключения
программатора при внутрисхемном программировании 2-х и более микроконтроллеров
Изменения некоторых FUSE-битов
необходимо производить с большой осторожностью. Особенно если демонтировать
микроконтроллер уже не представляется возможным. Главным образом это касается
битов RSTDISBL и DWEN (если таковые имеется). Сброс любого из них в дальнейшем
сделает невозможным использование линии RESET микроконтроллера. При RSTDISBL=0
вывод RESET настраивается как линия порта ввода-вывода, а при DWEN=0 - вход
RESET служит однопроводным отладочным интерфейсом dW. Естественно, что в обоих
случаях работа программатора с микроконтроллером будет заблокирована. Кроме
того во время внутрисхемного программирования микроконтроллеры AVR должны
работать от собственного источника тактовой частоты, выбор которого
осуществляется битами CKSEL3:CKSEL0. Если их настройка произведена некорректно
(например, вместо внутреннего RC-генератора, выбран внешний кварцевый
резонатор), то устройство может вообще отказаться работать. Еще один FUSE-бит,
о котором следует помнить, - это SPIEN. SPIEN не доступен во время
последовательного низковольтного программирования. Однако его установка при
программировании в каком-либо другом режиме запретит работу модуля SPI.
Напомним, что активизированным FUSE-битам соответствует состояние лог. 0.
Все поступающие в продажу
микроконтроллеры AVR изначально оптимизированы для внутрисхемного
программирования. Биты DWEN, RSTDISBL, SPIEN имеют состояние 1, 1 и 0
соответственно, а CKSEL3:CKSEL0 установлены таким образом, что в качестве
источника тактовой частоты запускается внутренний RC-генератор (как правило, на
частоте 1 МГц), не требующий ни каких дополнительных деталей.
2.4
Расчет электрической цепи R9VD1
Необходимо рассчитать стабилитрон
VD1 и резистор R9 согласно электрической схемы рисунок 4.
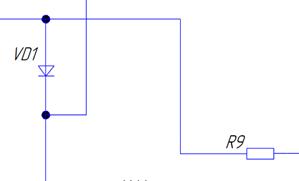
Рисунок 4. Стабилитрон VD1 и резистор R9
микропроцессорный программирование
микроконтроллер цепь
Рассчитываем коэффициент тока
транзистора по фор-муле:
 (1)
(1)
где KI - коэффициент
тока;k1 - ток коллектора, мА;б - ток базы, мА.
Диод VD1 и резистор R9 удовлетворяют
расчётным характеристикам.
3.
Надежность GSM-контроллера
3.1
Основные понятия надежности
Вычислительные системы - это
совокупность вычислительных средств включающих в себя не менее двух
вычислительных машин или процессов предназначенных для обработки цифровой
информации с заданным алгоритмом.
Качеством называется совокупность
свойств определяющих пригодность использования системы по назначению, при этом
показатели качества определяются назначением, машины или системы её
структурной, назначением, функционированием, а так как этот показатель
векторный компонентами которого служат показатели свойства являющиеся частными
показателями качества и оценка качества содержит два момента:
- нельзя
устанавливать единый обобщенный показатель качества.
- отсутствие
методики установления требований показатель качеств на все случаи жизни.
Надежностью называют свойство
технического устройства сохранять свои характеристики в данных условиях
эксплуатации.
Показатели надежности являются:
а) безопасность работы
 (2)
(2)
б) средние время безотказной
работы
 (3)
(3)
в) средняя наработка на отказ
 (4)
(4)
г) частота отказа
 (5)
(5)
Наиболее полно характеризует
надежность невосстанавливаемой системы частота отказов.
3.2
Расчетная часть
Рассчитываем коэффициент нагрузок КHR
для резисторов по формуле
КHR=PR / Pдоп (6)
где PR - рабочая мощность
резистора, Вт;
Pдоп - допустимая
мощность резистора, Вт.
Мощность резистора PR,
Вт, определяется по формуле
PR=U2 / R (7)
где U2 - напряжение на
резисторе, В;- сопротивление резистора, Ом.
Рассчитываем резистор R1,
R4, R5, R9 по формуле
U=5 (B);1=4,7
(кОм);
PR1=5*2/4700=25/4700=0,0005
(Bm);
КHR1=0,0005/0,125=0,04;
принимаем КH=0,4;
α=0,2;
принимаем λ0 из таблице
λ0=0,4;
принимаем λi по таблице
λi=0,4*0,4=0,16;
λс=0,16*3=0,48.
Рассчитываем резисторы R6 по формуле
U=5 (B);6=1 (кОм);R2,3=52/1000=25/1000=0,025
(Bm);
КHR2,3=0,025/0,125=0,2;
принимаем КH=0,2;
α=0,2;
принимаем λ0 из таблице
λ0=0,4;
принимаем λi по таблице
λс=0,08*3=0,24.
Рассчитываем резисторы R2,
R3, R7, R8 по формуле
U=5 (B);6=150
(Ом);R2,3=5*2/150=25/150=0,16
(Bm);
КHR2,3=0,16/0,125=1,28;
принимаем КH=1,5;
α=0,8;
принимаем λ0 из таблице
λ0 =0,8;
принимаем λi по таблице
λi=0,8*0,8=0,64;
λс=0,64*2=1,28.
Рассчитываем коэффициент нагрузок Кнс
для конденсаторов по формуле
Кнс=Uc /Uдоп (8)
где Uc - напряжение на
конденсаторе, В;
Uдоп - допустимое рабочее
напряжение конденсатора, В.
Рассчитываем конденсатор С1
по формулеc=5 (В);доп=25 (В);
Кнс1=5/25=0,2;
принимаем Кн=0,5;
α=0,09;
принимаем λ0 по таблице
λ0=2;
принимаем λi по таблице
λi=0,09*2=0,18;
λс=0,18*2=0,54.
Рассчитываем конденсатор С2,3 по
формулеc=5 (В);доп=50 (В);
Кнс2,3=5/50=0,1;
принимаем Кн=0,3;
α=0,06;
принимаем λ0 по таблице
λ0=2;
принимаем λi по таблице
λi=0,06*2=0,12;
λс=0,12*1=0,12.
Рассчитываем резистор C3, C4, C5, C8 по формуле
U=5 (B);
КHC2,3=0,0005/0,125=0,04;
принимаем КH=0,3;
α=0,2;
принимаем λ0 из таблице
λ0=0,4;
принимаем λi по таблице
λi=0,4*0,4=0,12;
λс=0,16*3=0,12.
Рассчитываем коэффициент нагрузок Кнд
для стабилитронов по формул
Кнд=I/Imax (9)
где I - фактически выпрямленный ток,
мА;max - максимально допустимый выпрямленный ток, мА.
Для стабилитрона VD1, VD2, VD3, VD4
Imax=250 (мА);=80 (мА);
Кнд=80/250=0,32;
принимаем Кн=0,30;
α=0,45;
принимаем λ0 по таблице
λ0=5;
принимаем λi по таблице
λi=0,45*5=2,25;
λс=2,25*4=9
Расчет микроконтроллера производим
по формуле
λобщ=λ0*Кн*Кор*К1*К2*n (10)
λ0=0,01;
Кор=10;
Кн=0,5;
К1=К2=1;=1.
где Кн - коэффициент
нагрузки;
Кор - коэффициент
интенсивности отказа;
К1 - коэффициент
механических нагрузок;
К2 - коэффициент механического
напряжения;- Количество микроконтроллеров.
λобщ=0,01*0,5*10*1*1*1=0,05
Рассчитываем места спаек:
λc= λ0*n (11)
Берем значение λ0 по таблице:
Считаем количество паек на
схеме=100;
λc=0,004*100=0,4;
Результаты заносим в таблицу 1
 (12)
(12)
Таблица 1-Расчет надежности
устройства
|
Наименование
|
Тип
|
Количество
|
t, C
|
KH
|
α
|
λ0
|
λi
|
λc
|
|
R1,4,5,9
|
4,7 (кОм)
|
4
|
40
|
0,4
|
0,2
|
0,4
|
0,16
|
0,48
|
|
R2,3,7,8
|
150 (Ом)
|
4
|
40
|
1,5
|
0,8
|
0,8
|
0,64
|
1,28
|
|
R6
|
1 (кОм)
|
1
|
40
|
0,2
|
0,2
|
0,4
|
0,08
|
0,24
|
|
C1,2,6,7
|
25 (мкФ)
|
4
|
40
|
0,5
|
0,09
|
2
|
0,18
|
0,54
|
|
C3,4,5,8
|
0,1 (мкФ)
|
4
|
40
|
0,3
|
0,06
|
2
|
0,12
|
0,12
|
|
VD1,2,3,4
|
3,6 (В)
|
4
|
40
|
0,3
|
0,45
|
5
|
2,25
|
9
|
|
Пайки
|
|
100
|
|
|
0,004
|
|
0,4
|
|
Итого
|
|
|
|
|
|
|
|
12,06
|

Принимаем значение T0 (ч)
(ч)
Вероятность безотказной
работы схемы рассчитывается по следующей формуле
 (13)
(13)
где  - время работы схемы,
ч.
- время работы схемы,
ч.
 (ч)
(ч)



 (ч)
(ч)
 (ч)
(ч)




Заключение
Использование в современном
микроконтроллере достаточного мощного вычислительного устройства с широкими
возможностями, построенного на одной микросхеме вместо целого набора,
значительно снижает размеры, энергопотребление и стоимость построенных на его
базе устройств. Используются в управлении различными устройствами и их
отдельными блоками:
- в
вычислительной технике: материнские платы, контроллеры дисководов жестких и
гибких дисков, CD и DVD, калькуляторах;
- электронике
и разнообразных устройствах бытовой техники, в которой используется электронные
системы управления - стиральных машинах, микроволновых печах, посудомоечных
машинах, телефонах и современных приборах.
Список литературы
1 AVR-RISC микроконтроллеры. / Вольфганг Трамперт, 2006, 464 c.
2 М.С. Куприянов, Р.И. Грушвицкий, О.Е. Мартынов и др. Под.
ред. Д.В. Пузанкова / Учебное пособие для вузов. - СПб., Поли-техника, 2002,
936 с.
Бродин В.Б., Шагурин М.И. Микроконтроллеры. /
Архитектура, программирование, интерфейс. - М.: ЭКОМ, 1999. - 400 с.
Щелкунов Н.Н., Дианов А.П. / Микропроцессорные средства и
системы. - М.: Радио и связь, 1989. - 288 с.
http://cxem.net.
Григорьев В.Л. Программное обеспечение микропроцессорных
систем. - М.: Энергоатомиздат, 1983.
Грушвицкий Р.И., Мурсаев А. X., Угрюмов Е.П.
Проектирование систем на микросхемах программируемой логики. - СПб.:
БХВ-Петербург, 2002.
Грушин С.И., Душутин И.Д., Мелехин В.Ф. Проектирование
аппаратных средств микропроцессорных систем: Учеб. пособие. - Л.: ЛПИ им.
Калинина, 1990.
Гутников В.С. Интегральная электроника в измерительных
устройствах. - Л.: Энергоатомиздат, 1988.
Каган Б.М., Сташин В.В. Основы проектирования
микропроцессорных устройств автоматики. - М.: Энергоатомиздат, 1988.
ГОСТ 2.105-95-Единая система конструкторской
документации. Общие требования к текстовым документам / Автор: Царева Н.А.