Модель силы для уравновешивания системы из двух грузов на трех пружинах
Министерство образования и науки
Российской Федерации
Федеральное агентство по образованию
Государственное образовательное
учреждение
Высшего профессионального образования
Новосибирский государственный
технический университет
Факультет: АВТФ
Кафедра вычислительной техники
Расчетно-графическая работа
по дисциплине «Основы теории
управления»
Модель силы для уравновешивания
системы из двух грузов на трех пружинах
Выполнил: Ряшинцев А.С.
Группа: АМ-610
Преподаватель: Воевода А.А.
Новосибирск 2008
Содержание
Введение
.
Математическое моделирование объектов. Принципы получения и использования
математических моделей
.1
Использование математических моделей
.2 Построение
математической модели объекта в виде системы дифференциальных уравнений
. Передаточная
функция системы
. Синтез
устройства управления
.1
Алгебраический метод синтеза
. Критерии
устойчивости
.1 Проверка
на устойчивость по критерию Найквиста
.2 Проверка
на устойчивость по критерию Гурвица
Вывод
Список
литературы
Введение
Цель
работы
Построение и исследование математической модели системы из двух грузов,
подвешенных на пружинах. Провести синтез регулятора для исследуемой системы по
ЛАЧХ и исследование системы с регулятором.
Техническое
задание
Объект управления - Система из двух грузов на трех пружинах
В заданной работе с помощью силы F2 необходимо уравновесить x2
1. Математическое моделирование объектов, Принципы получения
и использования математических моделей
Математизация изучаемых объектов состоит не в том, чтобы исключить из
процесса познания эксперимент и наблюдение. Смысл математизации состоит в том,
чтобы из точно сформулированных предпосылок выводить и прогнозировать то, что
часто недоступно непосредственному наблюдению. Когда речь идет о еще не
созданном техническом объекте, такое наблюдение вообще невозможно. Для того
чтобы изучить физическую систему, используя метод математического
моделирования, мы заменяем ее абстрактной системой - математической моделью - с
теми же соотношениями, и наша задача становится чисто математической.
Математическая постановка задачи имеет ряд серьезных достоинств.
Во-первых, она позволяет на принципиально иной основе провести
предпроектное исследование системы и, используя соответствующий аналитический
аппарат, выполнить с приемлемой для практики точностью сложные технические
расчеты. Во-вторых, реализуя построенную математическую модель на ЭВМ, имеется
возможность многократно и в широком диапазоне изменять входные параметры и
условия функционирования проектируемой системы и, тем самым, заменить натурные
испытания и эксперименты на физических моделях так называемым
"вычислительным" экспериментом на ЭВМ.
Есть еще два важных свойства метода математического моделирования. Одно
из них состоит в том, что с помощью этого метода системы и процессы, имеющие
разное физическое содержание, часто могут быть исследованы на базе одинаковых
математических моделей. В качестве такого примера в таблице приведены различные
системы (в том числе и немеханические), которые описываются одинаковыми
математическими моделями, отличающимися лишь постоянными параметрами. Если для
механических систем (в таблице - это 1, 2, 3, 4) математические модели
выражаются через обобщенные перемещения и ускорения (х, х, ф, ф, а, ä),
то последняя система (5)
представляет собой электрический контур, в котором емкость конденсатора
обозначена С, его заряд в момент времени t - q(t) и индуктивность катушки - L.
Другая особенность метода математического моделирования состоит в том,
что построение математических моделей не требует всеобъемлющей информации о
проектируемом объекте. Достаточно знать только формы движения (поведения)
системы и характер связей между ее составными частями. Например, при
исследовании системы 3 (см. таблицу) совершенно безразлично, какие опоры имеет
поступательно движущаяся масса m1 - опоры скольжения или опоры
качения, имеет ли она колесный или гусеничный движитель или каким типом
соединения масса m1 связана с массой m2 (нужно только
знать характер движения массы m1 относительно массы m2).
Точно так же для системы 2 не имеют значения особенности конструкции упругих
опор, что представляет собой тело, опирающееся на эти опоры (корпус или кузов
машины, платформу и др.). Важно только знать формы движения тела, полученные
под воздействием каких-то внешних факторов. Никаких других сведений для
построения математической модели не требуется.
Прежде чем практическая задача становится объектом математического
исследования, она должна пройти довольно длительный путь. Для этого, прежде
всего, нужно четко сформулировать цели исследования, изучить и проанализировать
необходимую исходную информацию и соответствующим образом ее обработать,
установить наиболее существенные факторы, которые должны быть учтены при
построении модели, и факторы, которыми можно пренебречь. Последнее позволит
получить математическую модель, поддающуюся либо аналитическому решению, либо
требующую небольших затрат машинного времени при реализации модели на ЭВМ.
Упрощая математическую модель явления, исследователь как бы очерчивает
границы ее применимости. Выводы, полученные в результате реализации такой
модели, уже не будут справедливы за пределами этих границ. В противном случае
мы можем прийти к совершенно искаженному толкованию изучаемого явления.
Математическая модель - это условный образ исследуемого объекта - совокупность
соотношений (уравнений, неравенств, формул, графических образов или логических
условий), связывающих характеристики процесса с параметрами объекта (системы),
исходными данными и начальными условиями.
Математическое моделирование - это процесс исследования системы с
помощью математических моделей. Оно включает в себя не только построение
математической модели системы, но и ее предварительное изучение, выделение
наиболее существенных характеристик системы, экспериментальный и теоретический
анализ модели, ее решения, сопоставление результатов решения с известными
данными о системе, корректировку модели и т. д.
Построение математической модели сводится к получению соотношений,
описывающих интересующие характеристики системы в функции ее параметров,
внешних возмущений и начальных условий. Для одних систем могут быть
использованы типовые математические схемы, для других требуется построить оригинальную
математическую модель.
.1 Использование математических моделей
Математическая модель может быть задана по-разному. В одних случаях - это
набор отдельных характеристик исследуемой системы xj(t) (j = 1, 2,
..., r), отражающих те или иные свойства системы. Эти характеристики выражаются
через соответствующие параметры системы в виде аналитических зависимостей. В
других - это формулы как результат решения этих уравнений или эксперимента
(эмпирические модели). Однако на практике, говоря о математической модели
системы, чаще всего имеют в виду первоначальную математическую модель,
получаемую непосредственно в результате формализации рассматриваемой системы.
Например, для динамической системы - это записанные в общем виде
дифференциальные уравнения движения, которые затем решают аналитически или
реализуют на ЭВМ. При использовании аналитических методов такую математическую
модель необходимо преобразовать и привести к виду, удобному для интегрирования.
Конечный результат этих действий обычно - построение явных формул для искомых
величин.
Теперь опишем параметры и характеристики заданной системы:
Масса 1-ого и 2-ого грузов - m1, m2
Координаты грузов - х1, х2, х3
Силы (воздействия), приводящие систему в движение - F1, F2 , F3
Коэффициенты упругости пружин - k1, k2, k3
Перейдем к построению математической модели объекта управления в виде
системы ДУ.
1.2 Построение математической модели объекта в виде системы
дифференциальных уравнений
1) Рассмотрим механическую систему, состоящую из 1-ой пружины, закрепленной
с одного конца, и груза массой m, прикрепленного к свободному концу пружины.
Будем считать, что груз может двигаться только в направлении оси пружины
(например, движение происходит вдоль стержня).
Построим математическую модель этой системы. Будем описывать состояние
системы расстоянием x от центра груза до его положения равновесия. Опишем
взаимодействие пружины и груза с помощью закона Гука (F = − kx) после
чего воспользуемся вторым законом Ньютона, чтобы выразить его в форме ДУ:

где
 означает вторую производную от x по времени:
означает вторую производную от x по времени:

Полученное
уравнение описывает математическую модель рассмотренной физической системы.
)
Рассмотрим систему из груза m1 и двух пружинок k1,k2.При
приложении к грузу силы F2, добавляется воздействие, которое происходит через
пружины, соединяющий груз и вершину модели.
х1 х2
 m1F2
m1F2
Аналогичным образом можем записать:

)
Рассмотрим систему из груза m2 и двух пружинок k1,k3
.При приложении к грузу силы F3, добавляется воздействие, которое происходит через
пружины, соединяющий груз и вершину модели.
 F3
F3
Аналогичным образом можем записать:

) Рассмотрим систему из двух грузов m1, m2 и
трёх пружинок, при воздействии на каждый груз силы, получаем систему уравнений,
составленную из уравнений из п.2, п.3
У
нас: 


Подставим
эти силы в уравнение (1). Получаем:



Перейдем
от дифференциальных уравнений к линейным при помощи преобразования Лапласа для
этого введем  вместо второй производной:
вместо второй производной:
 ,
,
 ,
,
Эта
система была получена из системы из п.4 путем подстановки в эту систему
найденного значения  .
.
Здесь
мы выражаем переменные  и
и  путем
деления правой части на
путем
деления правой части на
 ,
,
 ,
,


Дальше
мы выносим в правой части уравнения и как общие множители


Далее
приводим подобные члены, получим окончательную систему уравнений


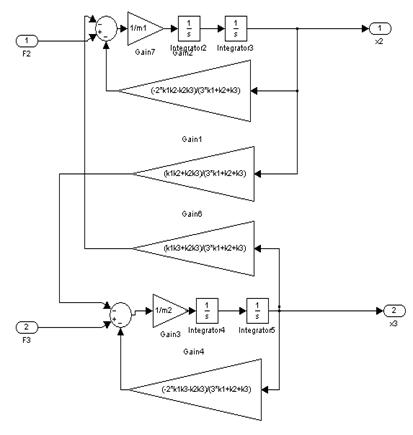
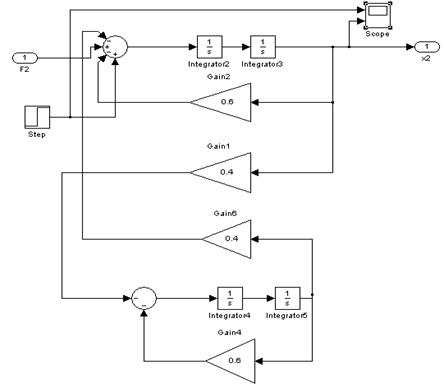
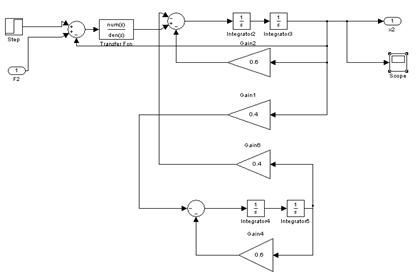
Структурная схема исследуемой системы:
Мы имеем нескорректированную систему.
2. Передаточная функция системы
Пусть коэффициенты упругости для пружин равны по 1, то есть: k1 =1,k2 =1,k3 = 1
. И пусть тогда массы грузов тоже будет по единице: m1 =1, m2 =
1. Это все нужно для упрощения структурной схемы. Так как в заданной работе с
помощью силы F2 необходимо уравновесить х2 , то
получим следующий вид нашей исследуемой системы:
Тогда при заданных значениях мы переходим от системы:


К системе:
Упрощенная
структурная схема исследуемой системы:
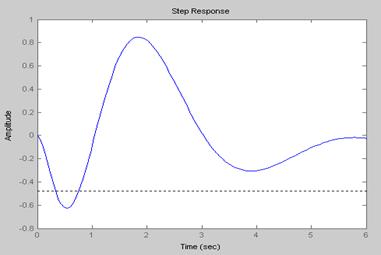
Построим графики сигналов на входе и выходе нескорректированной
разомкнутой системы
3. Синтез устройства управления
Передаточная функция исследуемого объекта:
[A,B,C,D]=linmod('R3');
sys=tf(ss(A,B,C,D))function:^2 + 0.6^4 - 8.326e-017 s^3 + 1.2
s^2 - 4.825e-017 s + 0.2
Так
как коэффициенты при  и
и  очень
малы, мы примем их равными 0. Составим передаточную функцию:
очень
малы, мы примем их равными 0. Составим передаточную функцию:
Здесь
два слагаемых приближенно равны
:
8.326e-017 s^3 , 4.825e-017 s
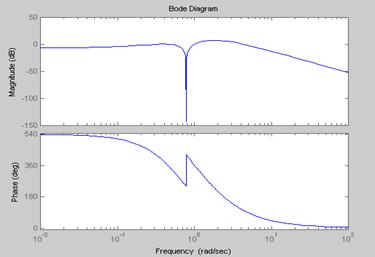
Перейдем
к построению ЛАЧХ (амплитудно-частотная характеристика) и ФЧХ (фазово-частотная
характеристика).
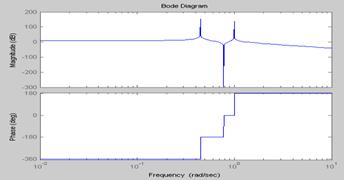
bode(sys)
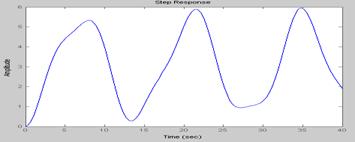
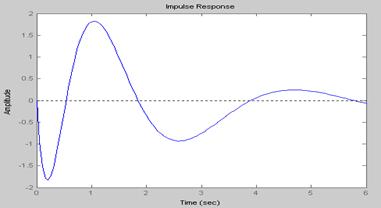
step (sys)
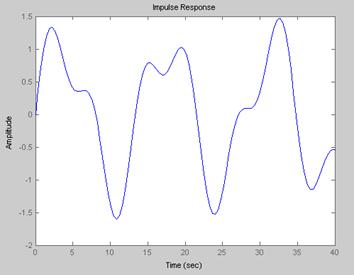
impulse(sys)
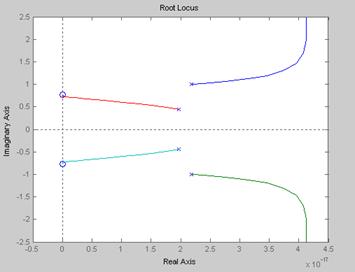
rlocus(sys.num{1},sys.den{1}
Мы
не видим возможности применить метод синтеза УУ по ЛАЧХ.
3.1 Алгебраический метод синтеза
Замкнутая
скорректированная система с УУ
Разработаем
регулятор со степенью на 1 меньше, то есть 3 степени:
Произведём расчет регулятора с помощью корней ХПЗС скорректированной
системы. ХПЗС скорректированной системы равен:

ХПЗС
имеет вид:

Произведём подстановку в ХПЗС всех чисел и переменных


Получим
выражение:

Нужно найти значения y3, y2, y1, y0, x3, x2, x1, x0:
[ 1 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0
.2 0 1 0 1 0 0 0
1.2 0
1 0 1 0 0
.2 0 1.2 0 0.6 0 1 0
0.2 0
1.2 0 0.6 0 1
0 0.2 0 0 0 0.6 0
0 0 0.2 0 0 0 0.6];
A = [1 7 21 35 35 21 7 1]; = B';
X = inv(A)*B
Результаты:
= 1.0000 7.0000 42.2000 7.4000-22.4000 19.2000 -2.4000 -0.8000
Регулятор имеет вид:

Структурная схема замкнутой скорректированной системы

Сигнал на выходе скорректированной замкнутой системы
Устройство управления приводит систему к устойчивому состоянию за 14
интервалов
Теперь построим графики переходных процессов в системе c регулятором
математический устройство управление система
bode(sys)
 (sys)
(sys)
impulse(sys)
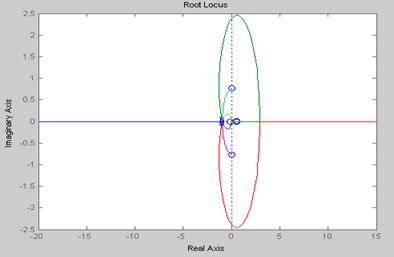
rlocus(sys.num{1},sys.den{1})
4. Критерии устойчивости
Необходимое условие устойчивости
Необходимое и достаточное условие устойчивости - отрицательность
действительных частей корней характеристического уравнения или, что идентично,
эти корни должны располагаться слева от мнимой оси.
В этих формулировках изложен не только признак устойчивости, но и дан, в
сущности, метод исследования устойчивости: необходимо найти корни
характеристического уравнения и проверить, лежат ли они в левой полуплоскости
или нет. Однако такой метод совершенно неадекватен задаче исследования в силу
следующих причин.
. Задача определения корней характеристического уравнения просто решается
только для уравнений первого и второго порядка; для всех других случаев
приходится пользоваться различными приближенными, сравнительно громоздкими
методами.
. Для определения устойчивости необходимо знать только знаки корней,
поэтому определение корней представляет ненужную трудоемкую работу. Между тем
не получают общих формул, по которым можно было бы судить о влиянии
коэффициентов уравнений на устойчивость системы, но именно это влияние, в
первую очередь, и интересует проектировщика системы автоматического регулирования.
Задача исследования часто ставится таким образом, что необходимо
определить коэффициенты уравнений, при которых система была бы устойчива.
В распоряжении исследователя имеются методы, позволяющие судить об
устойчивости системы по так называемым условиям устойчивости, не решая
характеристического уравнения и не находя его корней. Первым таким условием,
которое следует рассмотреть, является необходимое условие устойчивости.
Пусть характеристическое уравнение n-й степени имеет корни s1, s2, ...,
sn. Тогда это уравнение можно записать следующим образом
(s - s1) (s - s2) ... (s - sn) = 0. (6.26)
Если система устойчива, то корни должны быть либо действительными
отрицательными, либо комплексно-сопряженными с отрицательной действительной
частью.
Пусть
s1 = -α, α > 0, тогда s - s1 = s + α > 0.
Пусть
s2,3 = -α ± i ω, α > 0, тогда
(s - s2) (s - s3) = (s + α - i ω) (s + α + i ω) = (s + α)2 + ω2 > 0.
Отсюда следует, что после раскрытия скобок все коэффициенты уравнения
будут положительны.
Из этих рассуждений следует, что, когда хоть один из коэффициентов
характеристического уравнения отрицателен, то система неустойчива.
Если все коэффициенты характеристического полинома ai > 0, то любое
действительное положительное значение s, подставленное в уравнение, не может
обратить его в нуль и, следовательно, не является корнем характеристического
уравнения. Поэтому при ai > 0 невозможно появление нарастающих экспонент,
характеризующих апериодическую неустойчивость, т.е. апериодическая
неустойчивость невозможна. Однако может возникнуть колебательная
неустойчивость, т.е. появление в решении составляющих в виде колебаний с
нарастающей амплитудой. Это возникает, когда существуют комплексно-сопряженные
корни с положительной действительной частью. Поэтому условие положительности
коэффициентов при порядке системы больше двух является необходимым условием, но
не достаточным, а для уравнений первого и второго порядка это условие является
и достаточным.
4.1 Проверка на устойчивость по критерию Найквиста
Формулировка
критерия Найквиста: для устойчивости
замкнутой системы необходимо и достаточно чтобы амплитудно - фазовая
характеристика устойчивой разомкнутой системы при изменении  от0 до
от0 до  не
охватывала точку с координатами {-1, j0}.
не
охватывала точку с координатами {-1, j0}.
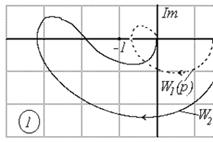
1
- устойчивая система
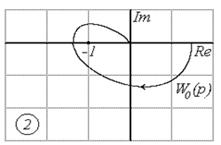
2 - неустойчивая система
Рис. 4. Частотные характеристики, иллюстрирующие критерий Найквиста
Разомкнутая
система может быть неустойчива, но это не означает, что неустойчивой будет и
замкнутая. В этом случае меняется формулировка критерия Найквиста: для
устойчивости замкнутой системы необходимо и достаточно, чтобы
амплитудно-фазовая характеристика неустойчивой разомкнутой системы при
изменении от 0 до охватывала
точку с координатами {-1, j0} в положительном направлении r/2 раз, где r число
корней характеристического уравнения разомкнутой системы с положительной
вещественной частью.
Имеем
Объект:
Имеем
Регулятор:
Устойчивая
разомкнутая система:
Wраз=WpWo
 =
tf([-22.4 19.2 -15.84 10.72 -1.44 -0.48],
=
tf([-22.4 19.2 -15.84 10.72 -1.44 -0.48],
[1
7 43.4 15.8 50.84 10.28 8.44 1.48])
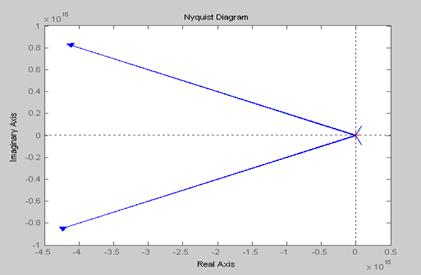
nyquist(A)
Вывод: График не охватывает точку [-1;j0] значит, устойчива замкнутая система.
4.2 Проверка на устойчивость по критерию Гурвица
Это алгебраический критерий, который предполагает рассмотрение
характеристического уравнения в стандартной форме:

Из
его коэффициентов по следующему правилу составляется матрица Гурвица:
 (4.13)
(4.13)
H = n x n
Приведем без доказательства критерий Гурвица.
Формулировка критерия. Для устойчивости линейной системы необходимо и достаточно,
чтобы все n определителей, получаемых из матрицы Гурвица H, были положительны.
 (4.14)
(4.14)
Здесь

Условие, при котором система находится на границе устойчивости, согласно
критерию Гурвица, имеет вид:
Характеристическое уравнение:

Все коэффициенты характеристического уравнения положительны - значит,
выполняется необходимое условия устойчивости по критерию Гурвица
Если произведение крайних меньше произведения средних - выполняется
достаточное условие по критерию Гурвицу и система будет устойчива.
1.48*1<7*8.44
истинно
*8.44<43.4*10.28
истинно
.4*10.18<15.8*50.84
истинно
Все условия выполнились, значит, система устойчива.
Выводы по
работе
В проделанной работе мы определили, что Устройство управления (УУ) имеет
передаточную функцию
и
приводит систему к устойчивому состоянию. Проверяли систему на устойчивость
разными критериями: Найквиста, Гурвица; увидели, что по этим критериям система
устойчива.
Список
литературы
1. Востриков
А.С., Французова Г.А. Теория автоматического управления. Линейные системы:
Учебное пособие. - Новосибирск: НГТУ, 1997.
. Ту Ю.
Современная теория управления. - М.: Машиностроение, 1971.
.
Солодовников В.В., Плотников В.Н., Яковлев А.В. Основы теории и элементы систем
автоматического регулирования. - М.: Машиностроение, 1985.
. Бесекерский
В.А., Попов Е.П. Теория автоматического регулирования. - М.:Наука, 1974.
5. Андриевский
Б.Р., Фрадков А.Л. Избранные главы теории автоматического управления с
примерами на языке MATLAB. - СПб.:Наука, 1999.