Промышленное производство
Задача 1
Экспериментально получены следующие точки
частотных характеристик объекта регулирования:
____________________________________________________________
 ,рад/с 0,020 0,050 0,100 0,200 0,500
1,000 2,000
,рад/с 0,020 0,050 0,100 0,200 0,500
1,000 2,000
_____________________________________________________________
 1,980 1,890 1,600 0,950 0,180 0,029
0,004
1,980 1,890 1,600 0,950 0,180 0,029
0,004
_____________________________________________________________
 ,рад 0,240 0,590 1,140 2,020 3,320
3,980 4,340
,рад 0,240 0,590 1,140 2,020 3,320
3,980 4,340
_____________________________________________________________
а) Даст ли идеальный
пропорциональный регулятор

устойчивое регулирование с этим
объектом?
б) Назовите предельное
(максимальное) значение К регулятора при работе о таким объектом. .
в) Какой запас устойчивости по амплитуде и какой
запас устойчивости по фазе будет у идеального пропорционального регулятора

при работе о таким объектом?
а) Идеальный пропорциональный
регулятор в данном
случае не дает устойчивого регулирования с этим объектом, возможно спад
напряжения, который демонстрирует график

б) Назовите предельное
(максимальное) значение К регулятора при работе о таким объектом.
Регулятор напряжения поддерживает
напряжение бортовой сети в заданных пределах во всех режимах работы при
изменении частоты вращения ротора генератора, электрической нагрузки,
температуры окружающей среды. Кроме того, он может выполнять дополнительные
функции - защищать элементы генераторной установки от аварийных режимов и
перегрузок, автоматически включать в бортовую сеть силовую цепь генераторной
установки или обмотку возбуждения.
Напряжение генератора зависит от
трех факторов - частоты вращения его ротора, силы тока нагрузки и величины
магнитного потока, создаваемого обмоткой возбуждения, который зависит от силы
тока в этой обмотке. Любой регулятор напряжения содержит чувствительный
элемент, воспринимающий напряжение генератора (обычно это делитель напряжения
на входе регулятора), элемент сравнения, в котором напряжение генератора
сравнивается с эталонной величиной, и регулирующий орган, изменяющий силу тока
в обмотке возбуждения, если напряжение генератора отличается от эталонной
величины.
В реальных регуляторах эталонной
величиной может быть не обязательно электрическое напряжение, но и любая
физическая величина, достаточно стабильно сохраняющая свое значение, например,
сила натяжения пружины в вибрационных и контактно-транзисторных регуляторах.
Максимальное значение будет
составлять 4,34
в) Запас устойчивости оценивают как степень
удаленности КЧХ от критической точки [-1, j0]. Если  ,
то можно найти, во сколько раз осталось увеличить передаточную функцию, чтобы
результирующее усиление вывело систему в колебательный режим:
,
то можно найти, во сколько раз осталось увеличить передаточную функцию, чтобы
результирующее усиление вывело систему в колебательный режим:  ,
откуда
,
откуда 
Запасом по усилению называется величина, на
которую нужно умножить передаточную функцию разомкнутой системы , чтобы ее
модуль на частоте сдвига фаз 180˚ стал равен 1.
Если на частоте сдвига фаз 180˚  коэффициент
усиления разомкнутого контура равен
коэффициент
усиления разомкнутого контура равен , то дополнительное усиление величиной
, то дополнительное усиление величиной  переведет
систему в точку [-1, j0], поскольку
переведет
систему в точку [-1, j0], поскольку  .
.
Аналогично вводится понятие запаса по фазе: это
минимальная величина  , на которую нужно
увеличить фазовый сдвиг в разомкнутой системе
, на которую нужно
увеличить фазовый сдвиг в разомкнутой системе  ,
чтобы суммарный фазовый сдвиг достиг 180˚, т.е.
,
чтобы суммарный фазовый сдвиг достиг 180˚, т.е. 
Знак "+" перед  стоит
потому, что
стоит
потому, что  .
.
Для оценки запаса устойчивости используют также
минимальное расстояние  от кривой
годографа до точки [-1, j0].
от кривой
годографа до точки [-1, j0].
На практике считаются приемлемыми значения =2...5,
=30˚...60˚,
=0,5...0,8.
Для графика эти критерии имеют следующие
значения:
для случая  ,
,

 =12,1;
=12,1;
 =15˚;
=15˚;
 =0,303.
=0,303.
для случая  ,
,
 =11,8;
=11,8;
 =47,6;
=47,6;
 =0,663.
=0,663.
для случая ,

 =1,5;
=1,5;
 =35,2;
=35,2;
 =0,251.
=0,251.
Если кривая годографа пересекает действительную
ось в нескольких точках, то для оценки запаса устойчивости берут ту из них,
которая наиболее близка к точке [-1, j0]. При более сложном годографе может
быть использована оценка запаса устойчивости как запас по задержке.

Уз = 3,35
Задача 2
Идеальный пропорциональный регулятор
регулирует уровень сыпучего вещества в бункере, куда оно подается ленточным
транспортером. Для ленточного транспортера получены точки частотных
характеристик:
_____________________________________________________________
,рад/с 1 2 5 10 20 50
____________________________________________________________
1,0 1,0 1, 0 1,0 1,0 1,0
____________________________________________________________
,рад 0,157 0,314 0,785 1,570 3,140
7,850
____________________________________________________________Уровень
сыпучего вещества в бункере описывается дифференциальным уравнением:
где F-
поток сыпучего вещества, поступающий в бункер.
Примечание: Постоянная времени интегрирования в
часах.
а) Постройте логарифмические частотные характеристики
ленточного транспортера и определите, какой вид звена он собой представляет.
б) Какой вид звена представляет собой бункер?
Напишите его передаточную функцию.
в) Постройте логарифмические частотные
характеристики бункера.
г) Постройте логарифмические частотные
характеристики объекта (транспортер + бункер).
д) Определите коэффициент усиления регулятора с
запасом устойчивости по фазе, равным +30°.
Логарифмические частотные характеристики
динамического звена
Из полученных логарифмических частотных
характеристик
звена видно, что амплитуда выходных колебаний
равна амплитуде входных колебаний при всех частотах (А(ω)
= 1, т.е. Ау = Ах), а отставание по фазе выходных колебаний по
сравнению с входными непрерывно увеличивается с ростом частоты, что характерно
для звена запаздывания.
Проверим это. Известно, что для звена
запаздывания

Проверим другую точку: при СО - 0,5 рад/с ω(л/2)
рад, откуда

Следовательно, передаточная функция звена

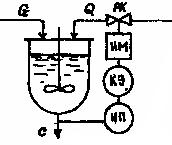
Задача 3
При этом содержание продукта в
выходящем из реактора потоке (С), зависящее от концентрации катализатора, тоже
будет изменяться:
(постоянные времени даны в минутах).
I. Как будет меняться
концентрация катализатора в реакторе, если произошло ступенчатое изменение его
расхода от 20 до 24 кг/мин?
2. В систему регулирования
входят также:
- безынерционный измерительный прибор
(ИП) с коэффициентом усиления  ; при отборе проб возникает
транспортное запаздывание,
; при отборе проб возникает
транспортное запаздывание,  мин;
мин;
- командный элемент (КЭ);
- исполнительный механизм (ИМ) и
регулирующий клапан (РК). представляющие собой статические звенья нулевого
порядка с коэффициентами усиления:  .
.
Графически (или аналитически)
определите, будет ли система регулирования устойчива, если командный элемент
реализует:
а) ПИ- закон регулирования, 
б) ПИД-закон регулирования, 
ПИ-закон регулирования
Наиболее распространенным на
практике является ПИ-регулятор, который обладает следующими достоинствами:
Обеспечивает нулевую статическую
ошибку регулирования.
Достаточно прост в настройке, т.к.
настраиваются только два параметра, а именно коэффициент усиления Кр и
постоянная времени интегрирования Ti. В таком регуляторе имеется возможность
оптимизации величины отношения Кр/Ti-min, что обеспечивает управление с
минимально возможной среднеквадратичной ошибкой регулирования.
Малая чувствительность к шумам в
канале измерения (в отличие от ПИД-регулятора).
ПИД-закон регулирования
Для наиболее ответственных контуров
регулирования можно рекомендовать использование ПИД-регулятора, обеспечивающего
наиболее высокое быстродействие в системе.
Однако следует учитывать, что это
условие выполняется только при его оптимальных настройках (настраиваются три
параметра).
С увеличением запаздывания в системе
резко возрастают отрицательные фазовые сдвиги, что снижает эффект действия
дифференциальной составляющей регулятора. Поэтому качество работы
ПИД-регулятора для систем с большим запаздыванием становится сравнимо с
качеством работы ПИ-регулятора.
Кроме этого, наличие шумов в канале
измерения в системе с ПИД-регулятором приводит к значительным случайным
колебаниям управляющего сигнала регулятора, что увеличивает дисперсию ошибки
регулирования и износ исполнительного механизма.
Таким образом, ПИД-регулятор следует
выбирать для систем регулирования, с относительно малым уровнем шумов и
величиной запаздывания в объекте управления. Примерами таких систем является
системы регулирования температуры.
ПИД регуляторы позволяют для
объектов постоянной времени обьекта (инерционностью) Тис малым транспортным
запаздыванием Td<0,2T обеспечить хорошее качество регулирования:
рассогласование регулирования E < 1% (от заданной точки), достаточное малое
время выхода на режим и невысокую чувствительность к внешним возмущениям.
Иногда (в некоторых обьектах регулирования с существенным транспортным
запаздыванием), при Td>0,2T ПИД регулятор обладает плохим качеством
регулирования. В этом случае хорошие качественные показатели обеспечивают
системы управления с моделью объекта.
Задача 4
В системе выщелачивания две емкости
соединены последовательно по ходу потока. При небольших колебаниях уровня в
первой емкости связь между притоком ( ) и стоком (
) и стоком ( ) определяется
уравнением:
) определяется
уравнением:
(постоянная времени дана в часах).
Жидкость из второй емкости
откачивается насосом, производительность которого ( ) не зависит
от уровня (L) в емкости.
) не зависит
от уровня (L) в емкости.
Уровень (L) во второй емкости связан
с производительностью насоса и стоком из первой емкости уравнением:
ленточный транспортер
сточный нейтрализация
. Определите, как будет меняться
уровень (L) во второй
емкости, если произошло ступенчатое изменение притока () в первую от
20 до 22 м3/ч а производительность насоса постоянна и равна  м3/ч
м3/ч
. Уровень во второй емкости
автоматически регулируется путем изменения притока в первую.
В систему регулирования входят
также:
- безынерционный измерительный прибоp (ИП) с
коэффициентом усиления K = I;
- командный элемент (КЭ), формирующий
идеальный пропорциональный закон регулирования;
- исполнительный механизм (ИМ),
передаточная функция которого:

безынерционный регулирующий клапан
(РК), имеющий коэффициент усиления 


Задача 5
Сточные воды, содержащие кислоту,
нейтрализуются щелочью а аппарате с мешалкой.
Перемешивание в аппарате отличается
от идеального, в результате возникает запаздывание смешения, равное 0,628 мин.
С учетом этого запаздывания, величина рН на выходе из аппарата связана с
расходом щелочи (F,кг/мин) уравнением:

(постоянная времени дана в минутах).
1. Определить значение рН на
выходе из аппарата через 10,628 мин после того, как произошло ступенчатое
изменение расхода щелочи (F) от 1 до 1,1 кг/мин.
2. Система автоматического
регулирования, управляющая величиной рН путем изменения расхода щелочи,
включает в себя также:
- рН-метр с системой отбора проб (pН),
передаточная функция которого:
- командный элемент (КЭ),
обеспечивающий идеальный пропорциональный закон регулирования;
·
исполнительный
механизм (ИМ) и регулирующий клапан (РК), представляющие собой статические
звенья нулевого порядка c
коэффициентами усиления
Графически или аналитически определить
коэффициент усиления командного элемента, при которой система регулирования
будет иметь запас устойчивости по амплитуде 40 %.
Этот метод дает возможность наиболее просто и
наглядно выбрать режим работы, уяснить принципы усиления каскада и определить
необходимые расчетные параметры его. При этом обычно выбираются или задаются:
тип усилительной лампы; ее основные параметры S, Ri, μ,
Pа
доп, Ua предельное, Ia предельное; -Uс0 и ±Um вх в режиме класса А; семейство
анодных характеристик лампы; Ra и Eа.
Требуется построить график и определить все
необходимые параметры каскада (Iа0, Iа макс, Iа мин, Ima; Ua0, Ua макс, Ia мин,
Uma, а также К = Uma / Um вх, ηэ
и ηп
и др).


рН = 6
Задача 6
Для регулирования температуры часть жидкости
перепускается через байпас и смешивается с нагретой жидкостью на выходе из теплообменника.
Номинальные условия работы теплообменника:
-расход жидкости
через байпас F= 2 м3/ч;
температура жидкости после смешения с байпасным
потоком t =70°С
Изменение расхода жидкости через байпас вызывает
отклонение температуры от номинального значения в соответствии с уравнением
( - отклонение от номинальных
значений).
- отклонение от номинальных
значений).
1) Автоматический регулятор
включает в себя:
- измерительный прибор (ИП),
чувствительный элемент которого установлен в трубопроводе на некотором
расстояния от места смешения потоков. В результате возникает транспортное запаздывание
(  = 0,314 мин), с
учетом которого передаточная функция измерительного прибора имеет вид:
= 0,314 мин), с
учетом которого передаточная функция измерительного прибора имеет вид:
- командный элемент (КЭ), являющийся статическим
звеном нулевого порядка;
- исполнительный
механизм (ИМ), передаточная функция которого:
- безынерционный регулирующий клапан
(РК) о коэффициентом усиления  = 2.
= 2.
Графически определить коэффициент
усиления командного элемента, при котором система регулирования будет иметь
запас устойчивости по амплитуде 50 %.
2) Каким будет показание
измерительного прибора через 0,814 мин после того, как расход через байпас
скачком изменился от 2 до 3 м3/ч.


Задача 7
Жидкость подогревается
острым паром в аппарате с мешалкой. Перемешивание идеальное, потери в
окружающую среду малы, давление пара и расход жидкости не изменяются.
Температура жидкости на выходе из аппарата
связана с температурой на входе и расходом пара уравнением:
 ,
,
где  - температура жидкости на входе в
аппарат ,
- температура жидкости на входе в
аппарат ,
 - температура жидкости на выходе из
аппарата, ;
- температура жидкости на выходе из
аппарата, ;
F - расход
пара, кг/ч (постоянная времени дана в часах.).
1. Определить, как
будет меняться температура жидкости на выходе из аппарата, если температура её
на входе непрерывно повышается, начиная с 10°С, со скоростью 2°С/ч, а расход пара
остается постоянным и равным 200 кг/ч.
2. Температура
жидкости на выходе из аппарата автоматически регулируется за счет изменения
расхода пара.
В систему регулирования входят также:
- термометр (Т),
представляющий собой статическое звено первого порядка с коэффициентом усиления
КT
=
1 и постоянной времени ТT
= 0,1
ч;
- командный элемент
(КЭ), передаточная функция которого:
- безынерционный
исполнительный механизм (ИМ) с коэффициентом усиления КИМ =1;
- безынерционный
регулирующий клапан (РК), имеющий коэффициент усиления КРК = 5.
Графически или аналитически определить, будет ли
система регулирования устойчива ?
3. Командный элемент (КЭ) с
передаточной функцией имеет
следующую структурную схему
Определить передаточную функциюW1(s), и назвать
звено I.
Передаточной функцией линейной
динамической системы называется отношение изображения по Лапласу выходного
сигнала к изображению по Лапласу входного сигнала при нулевых начальных
условиях.
Передаточная функция в общем случае
является дробно рациональной функцией относительно оператора преобразования
Лапласа:

Условие m £ n отвечает
условию реализуемости систем.
Отношение z-изображений выходного и
входного дискретных сигналов называют передаточной (или системной) функцией
дискретной цепи
Передаточная функция динамической
системы  может быть
представлена в виде дроби
может быть
представлена в виде дроби
Устойчивость достигается
тогда, когда все её полюса находятся в левой полуплоскости на плоскости корней.
В правой полуплоскости их быть не должно. Если получена замыканием отрицательной
обратной связью разомкнутой системы с передаточной функцией  , тогда
полюса передаточной функции замкнутой системы являются нулями функции
, тогда
полюса передаточной функции замкнутой системы являются нулями функции  . Выражение
. Выражение  называется
характеристическим уравнением системы.
называется
характеристическим уравнением системы.
Для дискретных и
дискретно-непрерывных систем вводится понятие дискретной передаточной функции.
Пусть  - входной
дискретный сигнал такой системы, а
- входной
дискретный сигнал такой системы, а  - её дискретный выходной сигнал,
- её дискретный выходной сигнал,  . Тогда
передаточная функция
. Тогда
передаточная функция  такой
системы записывается в виде:
такой
системы записывается в виде:
где  и
и  - z-преобразования для сигналов и соответственно:
- z-преобразования для сигналов и соответственно:
Задача 8
В реакторе с мешалкой проводится
полимеризация винила. Для обеспечения требуемого качества продукта необходимо
точно регулировать среднюю молекулярную массу полимера, которая определяется по
вязкости продукта и регулируется добавлением ингибитора.
Изменение расхода ингибитора (F)
приводит
к изменению его концентрации (С) в реакторе:
а это, в свою очередь, влияет на
среднюю молекулярную массу продукта (М):
 (постоянная времени дана в часах).
(постоянная времени дана в часах).
) Как будет меняться концентрация
ингибитора в реакторе, если произошло ступенчатое изменения его расхода от 10
до 12 кг/мин
2) Определить графически или
аналитически, будет ли система регулирования устойчива, если регулятор включает
в себя:
- безынерционный измерительный
прибор (ИП) для определения вязкости продукта с коэффициентом усиления КИП
= 1;
- командный элемент (КЭ), формирующий
идеальный пропорциональный закон регулирования. Коэффициент усиления командного
элемента ККЭ = 4;
- исполнительный механизм (ИМ) и
регулирующий клапан (РК), представляющие собой статические звенья нулевого
порядка с коэффициентами усиления КИМ = 1, КРК = 2;
- систему отбора проб, которая вносит
транспортное запаздывание, 

. Для улучшения
качества регулирования к командному элементу подключены три звена по схеме
Определить, какой загон регулирования
обеспечивает данная комбинация звеньев.
Закон регулирования формируется цепью главной
отрицательной обратной связи 3, выполненной в виде нелинейного инерционного
звена первого порядка. Постоянные времени этого звена при включении и
отключении блока различны, так как включенная в контур последовательно неоновая
лампа (НЛ) разделяет цепи заряда и разряда конденсатора обратной связи С3. При
включении усилителя У2 конденсатор Сз заряжается. Максимальное напряжение, до
которого может зарядиться конденсатор, определяет границы пульсирующего режима
работы регулятора. Скорость нарастания напряжения обратной связи зависит от
сопротивления Rv, включенного последовательно с емкостью С3.
Помимо цепи главной отрицательной обратной связи
3 прямой канал блока охвачен дополнительной цепью обратной связи 4, выполненной
в виде линейного инерционного звена, которое формирует длительность отдельных
включений UKn в пульсирующем режиме.
Передаточная функция блока Р-21 в пульсирующем
режиме при сигнале, намного превышающем зону нечувствительности, вместе с исполнительным
механизмом с постоянной скоростью и его пусковым устройством может быть
представлена в виде передаточной функции линейного ПИ-регулятора. Параметры его
динамической настройки можно изменять сопротивлениями Rv и Rn-Аналоговый
регулирующий блок Р-12 с вынесенными элементами оперативного управления и без
дистанционного изменения параметров настройки формирует на выходе,
гальванически изолированном от входа, унифицированный токовый сигнал 0- 5 мА,
связанный П-, ПИ- илиПИД-законом преобразования с алгебраической суммой входных
сигналов. Блок Р-12 применяется как для непосредственного управления
соответствующим исполнительным механизмом, так и в каскадных схемах
регулирования в качестве ведущего регулятора.
Структурная схема блока Р-12 показана на рис. 1.
Блок состоит из узла входных цепей /, усилителя постоянного тока (УПТ-УГ) с
высокоомным входом 2, модуля динамики 3, модуля ограничения 4, источника
питания 5 и усилителя 6 с высокоомным входом (УПГ-УГ) и двумя выходами:
основным токовым и дополнительным, гальванически изолированным по напряжению.
Узел входных цепей 1 воспринимает сигнал токовых преобразователей /д или
преобразователей напряжения ил и компенсирует их сигналом задающего устройства
с токовым выходом 13. у, формируя сигнал рассогласования £/вх.
Кроме того, при ручном управлении исполнительным устройством на узел / подается
сигнал от блока управления /б. у. Все токовые сигналы преобразуются в
напряжение. Усилитель постоянного тока 2 воспринимает разность между сигналом
рассогласования UBX и сигналом обратной связи U0. с и усиливает ее с
коэффициентом k2. Модуль динамики 3 содержит цепи функциональной обратной связи
RC и цепи, обеспечивающие безударные переключения с ручного управления на
автоматическое. Цепи функциональной обратной связи воспринимают сигнал выхода
усилителя 6 £УВых и формируют
сигнал обратной связи ио.с- Цепи, обеспечивающие безударное переключение,
получают управляющее воздействие от блока управления БУ. Модуль ограничения 4
воспринимает выходной сигнал усилителя 2 и передает его с коэффициентом
&4=1. Усилитель 6 воспринимает сигнал с выхода модуля ограничения. Он
охвачен 100%-ной жесткой обратной отрицательной связью и передает сигнал на
основной токовый выход и на дополнительный выход по напряжению с коэффициентом
&б=1. Блок питается от сети переменного тока напряжением 220 В, частотой 50
Гц.
Задача 9
Для приготовления катализаторного раствора могут
быть использованы аппараты с мешалкой разного объема V1 = 2 м3
, V2 =
10 м3
- расход
катализатора G = 96 кг/мин;
- расход
растворителя F = 4 м3/мин;
- заданная
концентрация катализатора С = 24 кг/м3.
Концентрация катализатора связана с расходом
катализатора и расходом растворителя уравнением;

( - отклонения от номинальных
условий).
- отклонения от номинальных
условий).
. Определить, как будет меняться
концентрация катализатора в аппарате объемом 2 м3 и в аппарате
объемом 10 м3, если произойдет ступенчатое изменение расхода
катализатора от 96 до 98 кг/мин, а расход растворителя будет постоянным и
равным номинальному.
2. Концентрация катализатора
регулируется расходом растворителя. Автоматический регулятор состоит из:
- измерительного прибора (ИП) с
системой отбора проб:
- командного элемента (КЭ);
- исполнительного механизма (ИМ),
- регулирующего клапана (РК)
Общая передаточная функция
измерительного прибора, исполнительного механизма и регулирующего клапана
равна:
(постоянная времени и время
запаздывания даны в минутах).
Командный элемент представляет собой статическое
звено нулевого порядка.

Графически или аналитически определить
максимальный (предельный) коэффициент усиления командного элемента регулятора,
работающего с аппаратом объемом 2 м3 и работающего с аппаратом
объемом 10 м3.
Коэффициент усиления регулятора определяется
величиной ООС. Если ООС выключена, коэффициент усиления регулятора
максимальный.
ООС может быть временно и в разной степени
заблокирована, в зависимости от скорости изменения регулируемой величины. Это
свойство обратной связи используется при создании ПД- и ПИД-регуляторов. Для
настройки регуляторов вводится дополнительный параметр, - постоянная времени
дифференцирования Тd.
В ПИ- и ПИД-регуляторы добавлена ПОС, скорость
изменения которой задается постоянной времени интегрирования Тi. На протяжении
переходного процесса ПОС постепенно выключает действие ООС и устанавливает
регулятор в режим пропорционального регулирования с минимальной РВ.
ООС и ПОС называются гибкими обратными связями.
Применяется еще одно название, - изодромные обратные связи (от греч. isos -
равный и dromos - бег). Отсюда название регулятора, - изодромный.
Переходной процесс в САР с ПИД-регулятором
возможно ускорить:
уменьшая величину ООС;
уменьшая скорость изменения ООС;
увеличивая скорость изменения ПОС.
Улучшая временную характеристику переходного
процесса, вместе с тем снижаем устойчивость системы автоматического
регулирования.
ПИД-регуляторы целесообразно применять в САР с
большой инерцией. В качестве примеров таких систем можно назвать:
бак (емкость), в который для заметного изменение
уровня требуется налить или вылить большой объем жидкости;
теплообменник, в котором внутренний теплообмен
протекает медленно и датчик температуры работает с запаздыванием.
Пневматические П-, ПИ-, ПД- и ПИД-регуляторы, в
основном, применяются в нефтегазохимической промышленности и в местах с
повышенными требованиями к взрывобезопасности и пожарной безопасности.
Для надежной работы пневморегуляторов требуется
выдерживать параметры сервисного воздуха, а также проводить регулярное
техническое обслуживание, что сопряжено с дополнительными затратами по
эксплуатации.
Воплощение различных структурных схем
регуляторов значительно упростилось с появлением ПИД-регуляторов на базе
микропроцессоров.
Как правило, в таких регуляторах сигнал
рассогласования одновременно подается на параллельные ветви, формирующие
пропорциональную, интегральную и дифференциальную составляющие, которые затем
суммируются и усиливаются. Т.е. каждую ветвь возможно рассматривать как
отдельный регулятор. Благодаря независимой работе, интегральная составляющая к
концу переходного процесса полностью замещает пропорциональную составляющую.
Несмотря на все многообразие выпускаемых
ПИД-регуляторов, принцип их действия остается неизменным.
На временной оси выделены основные моменты
переходного процесса:
К1,К2, - исходное состояние;
, - действует дифференциальная составляющая
регулирующего воздействия. Потоки Y и Z равны;
, - дифференциальное воздействие в момент
максимального значения;
, - на завершающей стадии дифференциального
воздействия;
, - на завершающей стадии интегрального
воздействия.
Если открыть дроссель ПОС больше, переходный
процесс завершится быстрее, см. кривая a на рис. 48 отметка на временной оси I.
Задача 10
В реакторе идеального смешения протекает реакция
первого порядка:
Объем реакционной смеси в результате реакции не
изменяется, уровень в реакторе поддерживается постоянным. Номинальные условия
работы реактора:
- расход сырья F
= 8
м3/ч;
- концентрация
реагента А в сырье
СI
= 50
моль/м3 ;
- концентрация
реагента А на выходе из реактора C2
= 20
моль/м3;
- константа скорости реакции 
- объем реактора V = 6 м3.
При небольших отклонениях расхода
сырья или концентрации реагента А в сырье от номинальных значений изменение
концентрации А на выходе из реактора описывается уравнением:
 ,
,

где  - отклонения
от номинальных значений.
- отклонения
от номинальных значений.
1. Определить, как будет
изменяться концентрация реагента А на выходе из реактора, если произошло
ступенчатое изменение его концентрации на входе от 50 до 48 моль/м3,
а расход сырья остался постоянным.
2) Содержание реагента А в
выходящем потоке регулируется путем изменения расхода сырья.
Концентрация реагента А на выходе из
реактора измеряется безынерционным анализатором (измерительный прибор) с
коэффициентом усиления
Система автоматизации
ректификационной установки, построенная на одноконтурных АСР отдельных
технологических параметров:
- регулятор температуры верха
колонны; 2 - регулятор температуры питания; 3 - регулятор уровня в кубе
колонны; 4 - регулятор уровня во флегмовой ёмкости; 5 - регулятор давления в
колонне; 6 - регулятор расхода греющего пара; 1а - регулятор расхода
дистиллята; 6а - регулятор температуры низа.
Несмотря на простоту,
рассматриваемая система автоматизации обладает рядом недостатков. Так,
стабилизация расхода греющего пара без учета реальной обстановки в системе
обычно приводит к перерасходу пара, поскольку регулятору расхода
устанавливается завышенное задание с учетом возможных колебаний энтальпии
греющего пара, переохлаждения флегмы и других возмущений в процессе.
Отсутствие компенсирующих
воздействий по возмущениям со стороны питания приведет к большим динамическим
ошибкам регулирования составов продуктов, так как регулятор состава (или
температуры) на конце колонны получит сигнал об отклонении регулируемой
координаты от заданного значения лишь после того, как изменится состав жидкости
по всей высоте колонны.
Использование температуры продукта
для регулирования его состава имеет еще один существенный недостаток: колебания
температуры при изменении состава соизмеримы с ее колебаниями при изменении
давления в аппарате и часто оказываются соизмеримы с погрешностью
контрольно-измерительного прибора. Например, при разности температур кипения
чистых продуктов 20°С (например,Т =100°С; Т = 8О°С) и допустимых колебаниях
состава продукта ± 1 % соответствующие колебания температуры составят ±0,2 °С.
В то же время для потенциометра со шкалой 0-150 °С и классом точности 0,5 погрешность
измерения составит 0,75 °С. На практике при разделении близкокипящих смесей
веществ сколько-нибудь ощутимые колебания температуры можно наблюдать только в
средней части каждой секции колонны. Эту особенность следует учитывать при
выборе класса точности и шкалы вторичного прибора, а также места отбора
импульса по температуре.
