Обогащение словарного запаса на уроках развития речи в младших классах вспомогательной школы
1
МЕРЕЖЕВА СТРУКТУРА ТРАНСПОРТНОГО ЗАСОБУ
На
даний час під терміном «мережева структура транспортного засобу» маються на
увазі не тільки різні системи проводів або шинної проводки, але і самі БУ,
а також правила комунікації і необхідне програмне забезпечення.
Швидкість
передачі даних має певні межі. Перш за все, досконалий сигнал прямокутної форми
можливий тільки теоретично. На практиці, з причини таких ефектів, як інерція,
самоіндукція і електромагнітне випромінювання, ми отримуємо швидше
трапецієподібне протікання сигналу. Відстань між передавачем і приймачем
відіграє велику роль. Так як опір провідника збільшується з його довжиною, сила
сигналу поступово зменшується. Крім того, сигнал змінюється через
електромагнітне випромінювання. Для забезпечення якості сигналу була б
необхідно висока напруга. Це збільшило б, у свою чергу, споживання потужності,
а також випромінювання. Крім того, збільшення напруги призвело б до зменшення
швидкості у зв'язку з інерцією. Для інтерпретації сигналу приймач з функцією
прийому даних орієнтується на певний максимальне напруження. Якщо сигнал в
момент прийому перевищує або не досягає відповідного граничного напруження, то
він визначається як 0 або 1.
Протягом
тривалого часу в системах автомобілів між різними електричними компонентами
використовувалося тільки пряме, аналогове з'єднання. Сигнал, в даному випадку -
напруга, спрямований в БУ і безпосередньо ним приймається. Таким чином, датчик
і приймач сигналів є ланками одного електронної схеми. З метою зменшення
схильності до перешкод та усунення проблем при обробці сигналів була
впроваджена широтно-імпульсна модуляція.
Широтно-імпульсна
модуляція-це передача параметрів в якості триваючого певний час сигнального
імпульсу в заданих, постійно повторюваних інтервалах часу. Таким чином, уникають
зміни сигналу внаслідок опору і перешкод.
Значення
сигналу при цьому кодується в якості моменту перемикання протягом встановленого,
постійно повторюваного інтервалу часу. Електричний дріт, приєднаний до БУ,
тепер уже не повинен передавати точні характеристики сигналу, а тільки
включатися і вимикатися. Чим довше він перебуває під напругою, тим вище стає
передається значення.
Особливістю
сучасної техніки є цифрова, бінарна передача сигналу. Аналого-цифровий
перетворювач перетворює значення сигналу в цифровий код. Точність перетворення
при цьому залежить від кількості використаних двійкових розрядів, так званих
бітів. Електричний дріт, приєднаний до БУ, включається і вимикається в більш
швидкій послідовності, щоб передати цифровий код. Цей код можна тепер легко
зберегти і передавати на інші БУ автомобіля.
Кодовані
цифрові сигнали можуть легко і без втрат передаватися на інші БУ. При цьому БУ
не потрібно з'єднувати між собою.
Замість
цього використовується принцип, вже довгий час застосовується в розподільних
щитах. Що знаходиться в них Струмоведуча шина постачає електричні компоненти
необхідною напругою. Електричні компоненти, образно кажучи, просто
"насаджуються" на шину, як, наприклад, пасажири автобуса розсідаються
за вільними місцями.
Така
Струмоведуча шина може використовуватися також і для розподілу цифрової
інформації. З'єднання це позначається терміном "Bus", від англійського
"Bus-Bar" - "Струмоведуча шина". Загалом, "Bus" є
системою проводки з відповідними елементами управління. Вона служить для обміну
даними між електронними компонентами.
До
недавнього часу в системах управління кожна інформація передавалася на свій
власний проводу. Тим самим з кожної додаткової інформацією зростало число
проводів і кількість контактів на роз'ємах БУ. Тому подібний тип передачі
інформації виправдовує себе тільки у випадку обмеженого обсягу переданих даних.
Для
вирішення завдання обміну великим обсягом інформації потрібно оптимальне технічне
рішення, при якому електронна та електрична системи залишалися зручними для
візуального спостереження і, разом з тим не займали дуже багато місця.
Сучасні
автомобілі мають дуже складну мережеву структуру, що забезпечує передачу даних
між різними БУ .
2
КОНФІГУРАЦІЯ МЕРЕЖЕВИХ СТРУКТУР
Якщо
шина виконана в якості однопроводної лінії, то, незважаючи на те, що вона дешева
і проста, швидкість передачі даних в ній обмежена. Так як сигнал вимірюється по
відношенню до маси транспортного засобу, він відносно сильно підданий впливу
перешкод. Необхідна висока потужність для передачі цього сигналу. На
двопровідних лініях сигнал передається як різниця напруги між обома проводами.
Завдяки цьому відбувається сильне демпфірування перешкод. Таким чином, напруга
зменшується, а швидкість передачі даних збільшується. Але з іншого боку,
двохпровідні лінії дорожче і складніше. Світловоди несприйнятливі до
електромагнітних ефектів. Тому можливі гранично високі швидкості передачі
даних. Однак світло може надходити і виходити тільки на площинах перетину
дроту. Якщо з одного боку проводу знаходиться джерело світла для надіслання
сигналу, то з іншого боку повинен знаходитися світлочутливий елемент з функцією
прийому сигналу. Передача сигналу в цьому випадку є односпрямованою, тобто вона
можлива тільки в одну сторону. Для передачі сигналу у зворотний бік необхідний
другий дріт, а в кожному приймач - джерело світла і елемент з функцією прийому
сигналу. Передача даних за допомогою радіозв'язку робить абсолютно непотрібними
наявність електропроводів, що з'єднують приймачі. Але надійність передачі даних
тут вельми обмежена. Різні пристрої створюють один одному перешкоди. Швидкість
передачі даних тут не вище, ніж в електронних шинах. Шинні системи
підрозділяються на різні класи, перш за все з точки зору можливих швидкостей
передачі даних. Для класифікації важливу роль відіграє також надійність
передачі даних. Позначення класів не слід плутати з позначеннями CAN-шин. Ці
позначення спочатку були пов'язані один з одним, але потім велися довільно.
Класифікація
шин передачі даних представлена в таблиці 2.1.
Таблиця
2.1 - Класифікація шин передачі даних
|
Класы шин
передачі даних
|
Діагностичні
шини
|
Клас А
|
Клас В
|
Клас С
|
Клас С+
|
Клас мультимедіа
|
|
Швид-кість
переда-чі даних
|
< 10 Кбіт/c
|
< 25 Кбіт/с
|
25-125 Кбіт/c
|
125
Кбіт/с- 1 Мбіт/с
|
> 1 Мбіт/c
|
> 10 Мбіт/с
|
|
Область застосування
|
Підключення
діагностичного обладнання
|
Системи забезпечення
комфорта (управління сидіннями, склопідйомники)
|
Система кондиціонування
повітря
|
Системи
привіду/ ходової частини
|
Гальмівна
система, рульове управління
|
Центральний
монітор, аудио-, відео навігаційні системи, телефон і т.д.
|
В
класі діагностики допускаються дуже низькі швидкості передачі даних. Надійність
передачі даних не має особливого значення. У разі появи помилок передача даних
здійснюється повторно. Так званий клас А може бути трохи швидше, але
використовується він тільки для некритичних завдань, таких як сигнал склопідйомніка
або прості сигнали перемикачів. У класі B шинні системи досягають вже значних
швидкостей. Ці шини використовуються в автомобілебудуванні головним чином в
електронних системах забезпечення комфорту. Шини класу C можуть відрізнятися
високою швидкістю і надійністю передачі даних. Вони використовуються в області
трансмісії та електроніки ходової частини транспортних засобів. Для критичних з
точки зору надійності завдань використовуються шини класу С +. При передачі
даних в гальмівних системах і системах рульового управління втрата даних
неприпустима, крім того, ці дані повинні передаватися дуже швидко. Шини класу мультимедіа
очолюють класифікацію в розряді швидкості передачі даних. Цього вимагає величезний
обсяг даних для аудіо-та відеосистем. Надійність передачі тут не є критичним параметром.
Існують різні можливості для з'єднання БУ, так звані топології. Саме просте
з'єднання - це з'єднання двох пристроїв на кінцях електропроводу. Таке
з'єднання називають повузлової, тобто від одного вузла до іншого, або з'єднання
"точка-точка". Часто зустрічається з'єднання кілька пристроїв. Шина
на кінцях, як правило, повинна бути закрита резисторами, щоб перешкодити
відображенню сигналу. При з'єднанні зіркою головний вузол окремо з'єднується з
іншими пристроями. Якщо вузол являє собою тільки з'єднання проводів, так званий
розподільник потенціалів, то в разі з'єднання зіркою мова йде практично тільки
при дуже короткому плоскому проводі. Якщо ж головний вузол є блоком управління
з вводами для периферійних пристроїв, то мова йде про кілька повузлових з'єднань.
З'єднання кільцем застосовуються, наприклад, при використанні світловодів в
якості середовища передачі даних. Якщо кожен пристрій передає прийняті світлові
імпульси далі, всі прилади можуть "спілкуватися" між собою. В такому
випадку мова йде практично про замкнуті ланцюги односпрямованих повузлових
сполук. Можливі способи з'єднання БУ представлені на рисунку 2.1.
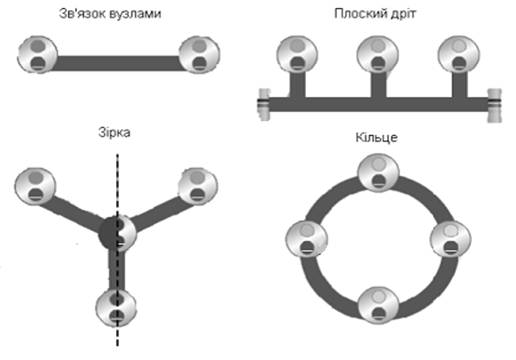
Рисунок
2.1 - Способи з'єднання БУ
При
комунікації між БУ передача лише самих даних недостатня. Необхідна також інформація
про те, яке значення мають дані, що передаються або від якого датчика ці дані
виходять, який вони мають пріоритет, чи потрібно їх передавати іншим БУ. Тому
БУ додає до первинних даними таку інформацію, як ідентифікаційний номер або
пріоритетність переданих даних. Приймач зі свого боку також додає інформацію,
що дозволяє виробляти остаточну передачу даних. До такої додаткової інформації
належать, наприклад, біти синхронізації. Їх імпульси дають можливість відкоригувати
тактові сигнали приймача для дійсно синхронної роботи з передавачем. Часто
попередньо передається довжина повідомлення. Так приймач дізнається, в який
момент закінчиться повідомлення, а разом з ним і передача даних. За допомогою
додаткових контрольних даних приймач може встановити, чи коректно було отримано
повідомлення. Вся ця інформація і, можливо, велика кількість іншої інформації
знаходиться в довгому ланцюгу бітів. Приймач повинен знати, де і яка інформація
знаходиться в цьому ланцюзі, щоб в кінцевому підсумку відфільтрувати головні
дані. Тому існують стандартизовані зразки, за якими мають структуруватися
повідомлення. Такий зразок називають протоколом. В даний час використовуються
різні протоколи для всіляких видів застосування. Приймачіпередавачі, що
працюють з різними протоколами, не будуть "розуміти" один одного.
Детально протокол передачі даних буде розглянуто в розділі 4. Вид передачі
даних є важливим критерієм для відмінності шинних систем. Синхронну передачу
даних можна порівняти з телефонною розмовою. У той час, коли один абонент говорить,
інший його уважно слухає і намагається відразу ж обробити почуту інформацію. Недоліком
синхронної передачі даних все ж є те, що її не можна перервати. В момент передачі
шина зайнята БУ та приймачі залишаються заблокованими до моменту повної
передачі повідомлення. Часто після передачі даних передавач чекає підтвердження
про отримання інформації і починає передачу всіх даних заново, якщо таке
підтвердження відсутній або надходить інформація про помилкову передачу даних.
Асинхронну передачу даних можна, швидше за все, порівняти з листуванням. В
цьому випадку передаються короткі повідомлення після закінчення певного часу.
Ці повідомлення спочатку збираються в БУ, а потім їм же обробляються. Між
повідомленнями шина може бути використана іншими БУ для передачі інших
повідомлень. Завдяки цьому навантаження на шину розподіляється рівномірно.
Таким чином, велика кількість інформаційних даних може передаватися швидко і в
повному обсязі. Для того щоб робота приймачівпередавачів залишалася ритмічною,
в потік інформаційних даних час від часу додаються синхронізаційних імпульси.
Але кількість так званих керуючих даних у порівнянні з кількістю інформаційних
даних незначно. Так звані керуючі дані додаються навіть до зовсім невеликим
повідомленнями, що значно збільшує загальний обсяг переданих даних. БУ не
повинні одночасно передавати дані на шину. У таких випадках повідомлення
знищуються. Цей процес називається зіткненням. Тому доступ до шини повинен
регулюватися. При передачі даних в системі задають і ведених пристроїв роль задає
бере на себе один БУ, який стає провідним для всіх інших відомих БУ. Тільки цей
БУ може самостійно передавати дані на шину. У регулярних відрізках часу цей БУ
посилає запити іншим блокам управління. Протягом короткого проміжку часу кожен
із запитуваних БУ має можливість відповісти на запит і передати повідомлення. З
метою прямих запитів все ведені БУ повинні бути зареєстровані у задає БУ. Тому
в сучасних системах при використанні шини необхідна фаза ініціалізації. При
управлінні доступом на рівні протоколу або передачі повідомлень все БУ можуть
рівноправно передавати дані на шину, якщо в даний момент не відбувається
передача даних. Якщо два пристрої одночасно починають передавати дані, то в цей
момент приймається рішення, який з них може продовжувати цю операцію. Інший БУ
затримує своє повідомлення. Для прийняття рішення може, наприклад, послужити
група двійкових знаків спочатку процесу передачі даних, яка вказує на пріоритетність
передачі. У так званому арбітражі повідомлення з низькою пріоритетністю зберігаються
довгий час і, в кінцевому рахунку, передаються занадто пізно. Тому
використовується керований арбітраж, який гарантує своєчасну передачу
інформації. У кожному транспортному засобі часто використовується відразу
кілька шинних систем. Яка система призначена для тієї чи іншої ділянки є
рішенням, що залежать від багатьох факторів. Сама середу передачі даних
відіграє певну роль. Скловолокнисті кабелі, наприклад, дуже легкі і дозволяють
високі швидкості передачі даних. Але в той же час, вони дуже чутливі і їх не
можна прокладати по гострим кутам. Максимальна дистанція, на якій шина може
працювати безпомилково, є важливим критерієм відбору. У вантажному автомобілі,
наприклад, потрібно кілька метрів електропроводів для з'єднання БУ в передній
частині з БУ в задній частині автомобіля. Деякі шинні системи можуть
застосовуватися тільки на коротких відстанях. Іноді поєднання двох БУ між собою
виявляється цілком достатнім. Яка кількість БУ може обслуговувати шинну систему
також є важливим питанням. Для аудіо і відеоданих, а також для систем, що
забезпечують безпеку, важливим фактором є швидкість передачі даних. З іншого
боку, для обслуговування функцій зміни положення сидінь достатньою є невелика
швидкість передачі даних. Шина повинна враховувати ці вимоги. Надійність
передачі даних в деяких випадках важливіше швидкості їх передачі. Помилки при
передачі даних в гальмівній системі можуть мати фатальні наслідки. З іншого
боку існують випадки застосування, коли перешкоди та затримки з причини помилок
при передачі інформаційних даних не є критичними. Важливим є також і те, як
система інтегрується в існуючу структуру автомобіля і його технічного
обслуговування з точки зору використовуваних протоколів, управління доступом і
відносин керуючих даних до даних для користування [5].
3
ОГЛЯД ШИННИХ СИСТЕМ
3.1
К-провід
K-лінія
або K-шина є попередником всіх шинних систем, що застосовуються в європейських
автомобілях. K-лінія використовується для діагностики і офіційно стандартизована
ще в 1989 році. До її переваг відносяться просте виконання і можливість
підключення до комп'ютера. У більшості випадків K-лінія складається тільки з
одного електропроводу. Напруга сигналу є робочою напругою транспортного засобу
по відношенню до його маси. Максимальна довжина K-лінії не специфікована. K-лінія
призначена виключно для виконання діагностичних функцій в двонаправлених
з'єднаннях з двома учасниками. На сучасних вантажних автомобілях модифікована
K-лінія застосовується для з'єднання декількох БУ. Швидкість передачі даних
такої шини складає від 1.2 до 10.4 Кбіт / сек. Так як K-лінія використовується
тільки в діагностичних цілях, надійність передачі даних тут не так важлива.
Завдяки простим і давно стандартизованим технічним параметрам витрати
залишаються мінімальними. K-лінія працює за асинхронної схемою передачі даних з
керуванням доступом в режимі "задає / ведений". Так як шина, не
розрахована на великі швидкості передачі даних, прийом одного повідомлення за
певних обставин може тривати до 5 секунд.
3.2
Технологія LIN
Технологія
LIN (Local Interconnent Network) розроблена спільними зусиллями різних
виробників автомобілів в кінці 90-х років в якості більш дешевої альтернативи
до технології Low-Speed-CAN. Технологія LIN застосовується скрізь, де не
потрібно ширина смуги пропускання і універсальність технології CAN. Фізично LIN
структурована як K-провід. На одному проводі рівень сигналу визначається при
робочій напрузі транспортного засобу по відношенню до його маси. Довжина лінії
обмежена до 40 м. Цього достатньо для використання шини LIN всередині одного
локального вузла автомобіля. На відміну від K-проводи технологія LIN допускає
з'єднання до 16 БУ. Швидкість передачі даних в такій шині становить від 1 Кбіт /
сек до 20 Кбіт / сек. У шинах LIN автомобілів "Мерседес-Бенц"
швидкість передачі даних від 9,6 до 20 Кбіт / сек. Технологія LIN призначена
для використання в некритичних з точки зору безпеки системах. Для LIN існує
кілька механізмів для розпізнавання і коригування помилок. Витрати на
виробництво та експлуатацію незначні, що власне і було метою розробки.
Протокол LIN також схожий на протокол K-лінії [5].
3.3
Технологія MOST
Шини
MOST (Media Oriented Systems Transport) використовуються в даний час на автомобілях
для передачі даних між такими системами як радіоприймач, CD-плеєр, телефон,
навігаційні системи і бортове телебачення. Такі шини дозволяють передавати
великий обсяг інформації. Технологія MOST вперше розроблена компанією Oasis
Silicon Systems, заснованої в 1998 році організацією MOST-Cooperation, яка
стандартизувала її в сфері створення мультимедійних мережевих структур в
транспортних засобах. У технології MOST використовуються світловоди. Вони
допускають екстремально високі швидкості передачі даних при абсолютній несприйнятливості
до електромагнітних перешкод. Довжина лінії не специфікована. Максимально
можливо підключити до 64 різних мультимедійних компонентів, які з'єднані, як
правило, у вигляді кільця. Швидкість передачі даних дорівнює 25 Мбіт / сек і
вважається дуже високою. Надійність передачі даних в шинах MOST не є основною,
так як ця технологія розроблена для некритичних з точки зору безпеки систем.
Однак кільцева структура, в якій поєднані світловоди, тягне за собою небезпеку
роз'єднання ланцюга в разі виходу з ладу одного з компонентів. Технологія MOST
є відносно дорогою технологією. Але з огляду на застосування головним чином у
системах забезпечення комфорту автомобілів представницького класу, витрати
виправдовують себе [1].
3.4
Технологія Bluetooth
Bluetooth,
розроблена фірмою Ericsson, об'єднує радіо технології і технології електронних
мереж. За допомогою Bluetooth можливо створювати невелику безкабельні мережеву
структуру. В якості середовища-носія використовуються радіохвилі в неліцензійному
діапазоні частот 2.4 ГГц. Цей діапазон використовується також в безкабельного
телефонах і мікрохвильових печах. З цієї причини технологія Bluetooth дуже
чутлива до перешкод. В залежності від потужності сигналу, максимальна відстань
між пристроями може становити від
1-10,
до понад 100 метрів. Технологія Bluetooth дозволяє створювати мережеві
структури, в які можуть об'єднуватися до 260 пристроїв, але активними можуть
залишатися одночасно не більше 8. Інші пристрої підтримують синхронізацію і
можуть бути активування за запитом. Швидкість передачі даних дуже висока і
становить понад 700 Кбіт / сек. Але така швидкість досягається тільки при
ідеальних умовах. Часто підключені пристрої створюють перешкоди один одному і
швидкість передачі по Bluetooth сильно зменшується. Через чутливості до
перешкод технологію Bluetooth не можна розглядати як високонадійну технологію.
Однак різні пристрої легко підключаються до цієї системи передачі даних. Для
технології Bluetooth використовуються готові мікрокристалічні модулі, що дозволяють
просте застосування. Однак технологія Bluetooth залишається відносно дорогою в
порівнянні зі звичайними технологіями підключення в мережеві структури
[4].
Основні
характеристики розглянутих шин передачі даних зведені в таблиці 3.1
Таблиця
3.1 - Основні характеристики шин передачі даних
|
Тип
шини
|
Середа
передачі даних
|
Довжина
передачі
|
Кількість
пристроїв
|
Швидкість
передачі
|
|
К-
провід
|
1-провідна
|
Без
специфікації
|
2
|
1,2-10,4
Кбіт / сек
|
|
CAN
|
2-провідна
|
Кілька
сотен метрів
|
>
100
|
10
Кбіт / сек -1мБіт / сек
|
|
LIN
|
1-провідна
|
Макс.
16
|
1-20
Кбіт / сек
|
|
MOST
|
світловоди
|
Без
специфікації
|
Макс.
64
|
25
Мбіт / сек
|
|
Bluetooth
|
радіохвилі
|
Кілька
метрів
|
Макс.
260
|
700кБіт/
сек
|
3.5
Технологія CAN
Скорочення
"CAN" означає Controller Area Network. Технологія CAN була розроблена
фірмою Bosch у другій половині 80-х років для надійної передачі даних
вимірювань, управління та контролю. У 1991 р. система CAN вперше застосована в
якості шини передачі даних класу C в транспортних засобах і з того часу добре
себе зарекомендувала. Стандарт CAN описаний в нормі ISO 11898. В системі CAN
використовується вита двухпровідна лінія. Рівень сигналу являє собою різницю
напруг між проводами. Завдяки цьому CAN не так сильно схильна перешкод і не
створює перешкоди для інших БУ. При низьких швидкостях передачі в разі розриву
одного проводу шина може функціонувати навіть з одним проводом. Довжина
проводки залежить від швидкості передачі даних. При цьому головну роль відіграє
час поширення сигналу. При 1 Мбіт / сек довжина CAN-шини може досягати 40 метрів,
а при 10 Кбіт / сек довжина теоретично може досягати більше 1 км. Так як управління доступом відбувається на рівні повідомлення, кількість БУ, в принципі, не
обмежена. У практиці все ж існують обмеження відповідно до виконанням
прийомопередавачів. Як і у випадку з напругою сигналу, швидкості передачі даних
в системі CAN не запропоновані. В електронних системах автомобілів
"Мерседес-Бенц" використовуються шини CAN з низькою і високою
швидкістю (Lowspeed-/Highspeed-CAN). Швидкість передачі даних Lowspeed
становить до 125 Кбіт / сек, Highspeed-CAN - більше 125 Кбіт / с.
Застосовуються різні механізми запобігання, розпізнавання і коригування
помилок. З їх допомогою БУ можуть попереджати про помилкові повідомленнях або
відключатися при встановленні помилки під час передачі даних. Тому технологія
CAN вважається найнадійнішою технологією. Завдяки простим і давно
стандартизованим технічним параметрам витрати на виробництво і експлуатацію цих
шин є мінімальними. Тому в даний час CAN застосовується навіть в якості діагностичних
шин. Технологія CAN функціонує синхронно. Управління доступом здійснюється за
допомогою арбітражу на рівні повідомлень. Кожне можливе повідомлення в системі
має однозначний код впізнання, перший біт якого отримує пріоритетний статус.
Якщо два пристрої передають дані одночасно, першочерговість передачі
автоматично переходить до пріоритетного повідомленням. Для обов'язкового
визначення коду розпізнавання кожного повідомлення резервуються 29 бітів. Отже,
короткі повідомлення містять більше керуючих даних, ніж даних для користування
[3].
3.6 Інші системи
передачі даних
Крім
згаданих вище, зустрічаються ще системи D2B, RS485, ASIC і LVDS.
3.6.1
Система D2B. Система D2B розроблена фірмою Philips як мультимедійний шинної
системи. Вона допускає швидкості передачі даних до 5 Мбіт / сек. D2B була в
значній мірі витіснена технологією MOST.
3.6.2
Система RS485. RS485 є модернізованим варіантом системи RS232,
успішно зарекомендувала себе в комп'ютерному світі. Ця система дозволяла тільки
прямі двонаправлені з'єднання між двома пристроями. Її модернізований варіант
RS485 допускає з'єднання до 32 приемопередатчиків. Ця система, що працює в
режимі асинхронної передачі зі швидкістю до 10 Мбіт / сек, є вигідною з
економічної точки зору альтернативою до технології CAN, що застосовується в
промисловості. В автомобілях вона використовується для з'єднання таксометра
автомобіля-таксі на салонному дзеркалі заднього виду.
3.6.3
Система ASIC. Система ASIC застосовується в панелі управління
вантажного автомобіля "Мерседес-Бенц" Actros. Кожен перемикач має
свій встановлений код, який задає учасник системи ASIC використовує в запитах.
Таким чином, панель управління може розширюватися додатковими перемикачами.
Швидкість передачі даних 30 Кбіт / сек, видається цілком достатньою для такого
застосування.
3.6.4
Система LVDS.Скорочення "LVDS" (Low Voltage Differential
Signal), означає "диференційний сигнал низької напруги". Передача
даних відбувається завдяки швидкому переключенню полюсів двох проводів з
різницею напруг всього лише в 0,3 В. Так як електромагнітні ефекти при цьому
незначні, можливе досягнення швидкості передачі даних величиною в кілька сотень
Мбіт / сек. Система LVDS знаходить застосування, наприклад, при передачі
зображень в приладі нічного бачення в автомобілі "Мерседес-Бенц"
нового S-Класу. Розглянемо детальніше пристрій шини передачі даних CAN [6].
4
ШИНИ ПЕРЕДАЧІ ДАНИХ CAN-DATENBUS
4.1 Мережева
конфігурація CAN-Datenbus
Мережева
конфігурація САN-Datenbus. З 1980 року цифрова електроніка початку свій
бурхливий розвиток. На транспортних засобах все більше стали застосовуватися
електронні БУ. Для організації комунікації між різними БУ фірма Bosch розробила
CAN-шину (CAN-Datenbus), де CAN розшифровується як Controller Area Network. Це
означає, що блоки управління пов'язані між собою в єдину мережу (рис. 4.1) і
між ними відбувається обмін даними по спеціальній шині. Елементи приводу
автомобіля складають єдину систему, куди входять:
-
блок керування двигуном;
-
блок управління АКП;
-
блок управління системами ходової
частини;
1
керування двигуном; блок 2 управління АКП; блок 3 управління системами ходової
частини
Рисунок
4.1 - Схема зв'язку блоків управління CAN-шиною
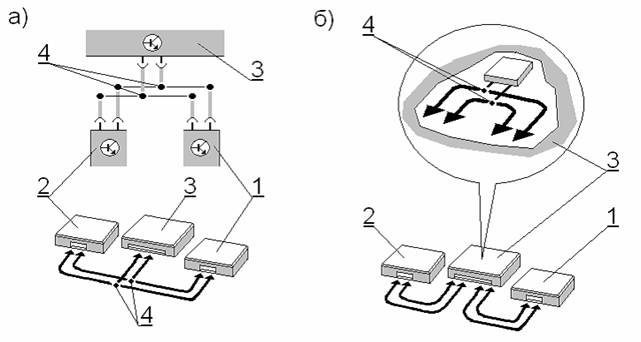
а
- вузловий пункт знаходиться за межами БУ; б - вузловий пункт знаходиться в БУ
двигуном; 1 - БУ гальмівною системою; 2 - БУ АКП; 3 - БУ двигуном;
4
- вузловий пункт
Рисунок
4.2 - Варіанти з'єднання блоків управління в єдину мережу:
При
цьому можливі варіанти з'єднання БУ між собою в єдину мережу (рис. 4.2).
Так, вузловий пункт знаходиться, як правило, за межами БУ, в джгуті проводів (рис.
4.2, а). У виняткових випадках вузловий пункт може знаходитися всередині БУ
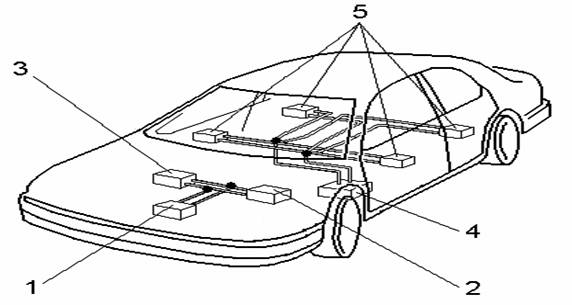
двигуном (рис. 4.2, б.) Комфортні
елементи також становлять єдину систему, що включає в себе центральний блок 4
(рис. 4.2)
управління та блоки 5 управління в дверях. При обміні інформацією за допомогою
CAN-шини всі дані передаються по двох двонаправлених проводах (проводять
повідомлення в обидві сторони), незалежно від кількості даних і БУ. У цьому
випадку передача даних відбувається аналогічно телефонної «конференц-зв'язку»,
де один учасник (блок управління) «говорить» свої дані в провідну мережу, в той
час як інші учасники «слухають» ці дані. Одні учасники знаходять ці дані
цікавими для себе і будуть їх використовувати, інші - ні. Чим більше інформації
про стан всієї системи міститься в БУ, тим краще він може погоджувати окремі
функції системи. Таким чином, шина передачі даних має такі переваги:
-
якщо протокол даних передбачається
розширити за рахунок додаткової інформації, то не потрібно вносити зміни до
програмного забезпечення;
-
низька квота помилок в результаті
постійної повторної перевірки інформації, переданої через БУ;
-
менша кількість датчиків і проводів
завдяки можливості багаторазового використання одного сигналу;
-
між БУ можлива дуже швидка передача
даних;
-
економія місця за рахунок зменшення
розмірів БУ і роз'ємів підключення БУ;
-
CAN-шина прийнята до використання в
усьому світі, тому через неї може відбуватися обмін даними між БУ,
виготовленими різними виробниками.
Комунікацію
між БУ забезпечують так звані приймачі, що з'єднують їх з шиною. Вони
інтегровані в БУ, але являють собою самостійні компоненти, що посилають і
приймають дані. БУ з функцією посилки даних готує дані для свого приймача. У
певному ритмі біти перетворюються в електричний сигнал і подаються в шину.
Приймач блоку з функцією прийому даних обов'язково повинен працювати в такому ж
ритмі. Він вимірює сигнал шини і генерує відповідні біти, подаючи їх до БУ.
Приймачіпередавачі повинні бути синхронізовані. Ритм, який вказує на кількість
бітів, які можуть передаватися за одну секунду, є швидкістю передачі даних.
Швидкість передачі даних позначається в кіло-або мегабітах за секунду. Одиниця
виміру "Біт / сек" позначається також терміном "бод".
Тривалість часу одного біта називають "час Біт".
CAN-шина
складається з наступних компонентів (рис. 4.3): по одному контролеру і
трансивер в БУ, двох опорів і двох проводів передачі даних. За винятком
проводів всі компоненти розташовуються в БУ. Незважаючи на це в роботі БУ не
відбулося жодних змін. Зазначені компоненти шини виконують такі функції:
-
контролер - з одного боку отримує від БУ
дані, які повинні бути передані, обробляє їх і передає далі на трансивер. З
іншого боку він отримує дані від трансивера і після відповідної обробки передає
їх в БУ;
-
трансивер (Transceiver) - є одночасно
передавачем (Transmitter) і приймачем (Receiver). Вступні від контролера дані
він перетворює в електричні сигнали і посилає їх по дротах передачі даних. При
цьому він також приймає дані і перетворює їх для контролера. Дані в системі
приводу, щоб їх можна було використовувати з максимальною ефективністю, повинні
передаватися дуже швидко. Для цього потрібно трансивер c високою потужністю.
Такий трансивер робить можливим передачу даних в проміжку між двома спалахами в
системі запалювання [3].
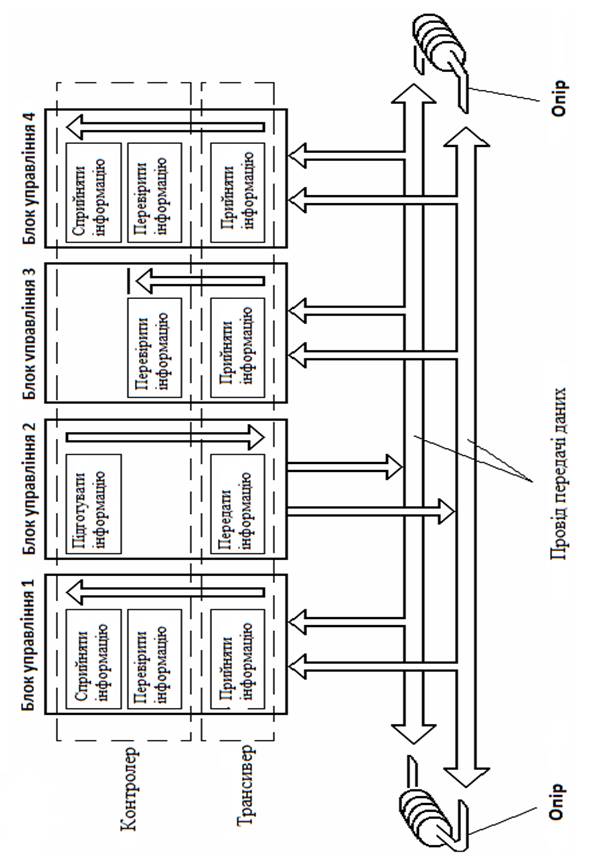
Рисунок.
4.3
- Функціональна схема CAN-шини
Тим
самим сприйняті дані можуть бути використані вже для наступного керуючого імпульсу.
Опір
- перешкоджає виникненню ефекту резонансу при передачі даних.
Провід
передачі даних - є двонаправленим і служить для передачі даних, позначаються як
CAN-High і CAN-Low. Передача інформації з застосуванням CAN-шини відбувається
наступним чином (рис. 4.3). Один з БУ (блок 2) готує інформацію і передає її на
дроти передачі даних. При цьому «приймач» переданої інформації не вказується, і
вона приймається і оцінюється усіма блоками управління (блоки 1, 3, 4).
Розглянемо тепер кожну з функцій, які виконуються блоками управління і
представлених на (рис.. 4.3)
Підготувати
інформацію - дані обробляються БУ 2 і готуються для передачі контролером.
Передати
інформацію - трансивер БУ 2 отримує інформацію від контролера, перетворює її в
електричні сигнали і передає далі.
Прийняти
інформацію - всі інші блоки керування (блоки 1, 3, 4), які утворюють з CAN-шиною
єдину мережу, виконують роль приймачів.
Перевірити
інформацію - блоки керування 1, 3, 4 перевіряють, чи потрібна їм для роботи
надійшла інформація.
Сприйняти
інформацію - якщо інформація важлива, вона сприймається і переробляється (блоки
1, 4), в іншому випадку - залишається без уваги (блок 3). Таким чином, передача
даних CAN-шиною має такі особливості:
- CAN-шина має два
дроти, по яких передається різна інформація. При цьому щоб послабити
електромагнітні перешкоди, а також випромінюють перешкоди, обидва дроти
передачі даних скручені між собою . При цьому важливий крок скручування.
- CAN-шина може
працювати зі швидкістю 500 Кбіт / сек. Ця швидкість укладається в діапазон
швидкостей high speed 125 ... 1000 Кбіт / сек. Передача одного протоколу даних
триває близько 0,25 мс.
- в залежності від
БУ через кожні 7 .. 20 с робиться спроба відправити дані.
- послідовність
пріоритетів в передачі інформації: 1 - БУ гальмівною системою; 2 - БУ двигуном;
3 - БУ АКП.
4.2
Протокол
даних
CAN-шина
передає протокол даних, що складається з безлічі впорядкованих бітів, між
блоками управління. Біт - це найменша одиниця інформації, тобто одне включення
в одиницю часу. В електроніці ця інформація може мати значення "0"
або "1", відповідно "так" чи "ні". Протокол даних
(рис. 4.4) містить сім областей (полів). Число бітів одного протоколу залежить
від величини поля даних 5.

1
- початкове поле (1 біт); 2 - поле визначення статусу (11 біт); 3 - один біт не
використовується, 4 - контрольне поле (6 біт); 5 - поле даних (максимально 64
біт); 6 - поле захисту (16 біт); 7 - поле підтвердження (2 біт); 8 -
завершальне поле (7 біт)
Рисунок
4.4 - Залежність числа бітів
Структура
протоколу ідентична для обох проводів передачі даних CAN-шини. Розглянемо
призначення кожного з полів протоколу даних.
Початкове
поле 1 - відзначає початок протоколу даних. По проводу CAN-High надсилається
один біт інформації, при цьому величина сигналу близько 5 В (визначається системою).
По проводу CAN-Low надсилається один біт інформації, величина сигналу якого 0
В. В поле визначення статусу 2 встановлюється пріоритет протоколу даних. Якщо,
приміром, два БУ одночасно хочуть відправити свій протокол даних, перевагу має
протокол з більш високим пріоритетом. У контрольному полі 4 позначено число
інформаційних повідомлень, що знаходяться в поле даних. Таким чином, кожен
приймач може перевірити ще раз, чи всі інформаційні повідомлення він прийняв. У
поле даних 5 власне і відбувається передача інформаційних повідомлень для інших
БУ. З наведеної таблиці 4.1 можна побачити, як з кожним додатковим бітом
подвоюється обсяг переданої інформації, на прикладі температури охолоджуючої
рідини автомобільного двигуна (значенням "0" відповідає сигнал 0 В, а
"1" - 5 В).
Таблиця
4.1 – Побітний обсяг інформації
|
Варіанти
з 1 бітом
|
Можлива інформація
|
Варіанти
з 2 бітами
|
Можлива інформація
|
Можлива інформація
|
|
0
В
|
10
°С
|
0
В, 0 В
|
10
°С
|
0
В, 0 В, 0 В
|
10
°С
|
|
5
В
|
20
°С
|
0
В, 5 В
|
20
°С
|
0
В, 0 В, 5 В
|
20
°С
|
|
–
|
–
|
5
В, 0 В
|
30
°С
|
0
В, 5 В, 0 В
|
30
°С
|
|
–
|
–
|
5
В, 5 В
|
40
°С
|
0
В, 5 В, 5 В
|
40
°С
|
|
–
|
–
|
–
|
–
|
5
В, 0 В, 0 В
|
50
°С
|
|
–
|
–
|
–
|
–
|
5
В, 0 В, 5 В
|
60
°С
|
|
–
|
–
|
–
|
–
|
5
В, 5 В, 0 В
|
70
°С
|
|
–
|
–
|
–
|
–
|
5
В, 5 В, 5 В
|
80
°С
|
У
таблиці 4.2 дано зразкову побудова інформації про становище дросельної заслінки
автомобільного двигуна з допомогою 8 Біт. При цьому можливе 256 різних
варіантів послідовності бітів. Завдяки цьому передається інформація про
становище дросельної засланки в діапазоні від 0 ° до 102 ° з інтервалом в 0,4
°.
Таблиця
4.2 - Побудова інформації про становище дросельної заслінки
|
Послідовність бітів
|
Положення дросельної засланки
|
|
0000 0000
|
Кут відкриття дросельної заслінки - 000,0°
|
|
0000 0001
|
Кут відкриття дросельної заслінки - 000,4°
|
|
0000 0010
|
Кут відкриття дросельної заслінки - 000,8°
|
|
....
|
....
|
|
0101 0100
|
Кут відкриття дросельної заслінки - 033,6°
|
|
....
|
....
|
|
1111 1111
|
Кут відкриття дросельної заслінки - 102,0°
|
В
поле підтвердження 7 приймачі підтверджують передавача коректний прийом протоколу.
При наявності помилки приймачі негайно повідомляють про це передавача, і той
повторює передачу. В кінці протоколу даних знаходиться завершальне поле 8.
Таким чином, надається остання можливість розпізнавання помилок, наявність яких
веде до повторення трансляції даних [3].
4.3
Розподіл інформації
Якщо
відразу кілька БУ хочуть відправити свої протоколи даних, необхідно вирішити,
чий протокол буде відправлений першим. Протокол даних з максимальним
пріоритетом буде відправлений у першу чергу. Так, наприклад, протокол даних від
БУ гальмівної системи з інформацією, що стосується безпеки, оцінюється як більш
важливий, ніж протокол від БУ АКП, що містить інформацію про комфорт руху.
Розподіл інформації відбувається наступним чином - кожному протоколу даних
відповідно до його пріоритетом в поле визначення статусу 2 (рис. 4.4)
відповідає код, що складається з 11 бітів. Кожен біт має значення, якому
відповідає певна «значимість». Вона може бути або підвищеною, або зниженою (таб.
4.3)
|
Біт
з напругою
|
Значення
|
Значимість
|
|
0
В
|
0
|
Підвищення
|
|
5
В
|
1
|
Зниження
|
У табл. 4.4 наводиться
пріоритет трьох протоколів даних.
Таблиця 4.4 – Пріоритет
трьох протоколів даних
|
Пріоритет
|
Протокол
даних
|
Поле
визначення статусу
|
|
1
|
Гальмівна
система
|
001
1010 0000
|
|
2
|
Двигун
|
010
1000 0000
|
|
3
|
Коробка
передач
|
100
0100 0000
|
Всі три БУ одночасно починають
передавати свої протоколи даних. Одночасно починається їх порівняння біт за
бітом в проводі передачі даних CAN-шини. Якщо один БУ посилає біт зі зниженою
значущістю "1" і розпізнає інший біт з підвищеною значущістю
"0", він припиняє передачу і стає приймачем. Так, видно з таблиці 4.4,
найбільшим пріоритетом має інформація, яка надходить від гальмівної системи (на
початку поля йде сигнал "00"), потім від двигуна ("01") і
тільки потім від коробки передач («10»).
4.4
Боротьба з перешкодами при передачі інформації
Джерелами перешкод в автомобілі
стають деталі, при роботі яких виникає іскровий розряд, тобто відбувається
розмикання або замикання електричного кола. Іншими джерелами перешкод можуть
ставати, наприклад, мобільні телефони та передавальні радіостанції, тобто все,
що випромінює 32 електромагнітні хвилі. Ці хвилі можуть впливати на передачу
даних або спотворювати їх.
Щоб послабити дію перешкод на
передачу даних, два дроти передачі даних CAN-шини скручуються між собою. Таким
чином, усувається можливість випромінювання перешкод також і від самих проводів
передачі даних. На обох проводах створюється відповідно протилежне напруга:
якщо на одному з дротів передачі даних напруга близько 0 В, то на іншому
проводі - близько 5 В, і навпаки. Завдяки цьому сума напружень в будь-який
момент залишається постійною, і ефект електромагнітного поля на обох проводах
взаємно знищується (рис. 4.5).
При цьому дріт передачі даних
захищений від зовнішніх перешкод і сам не є джерелом перешкод
[2].
Рисунок 4.5 - Схема роботи захисту
від перешкод проводів передачі даних
5 ПРОПОЗИЦІЇ ЩО ДО ОТРИМАННЯ ДАНИХ
З CAN-ШИНИ АВТОМОБІЛЯ
5.1
Актуальність рішення
Коли заходить мова про
моніторинг таких параметрів, як швидкість транспортного засобу і витрата
палива, надійним і відпрацьованим рішенням є установка автотрекера і датчика
рівня палива.
Якщо ж необхідний доступ до
такої інформації, як обороти двигуна, пробіг, температура охолоджуючої рідини і
іншими даними з бортового комп'ютера - це завдання вже більше схожа на творчу
Здавалося б, що може бути
логічніше - якщо в автомобілі вже є всі необхідні датчики, то навіщо
встановлювати нові? Практично всі сучасні автомобілі (особливо, якщо мова йде
про особисті автомобілях бізнес-класу і дорогої спецтехніки) штатно обладнані
датчиками, інформація з яких надходить в бортовий комп'ютер
Питання полягає тільки в тому,
як отримати доступ до цієї інформації. Довгий час ця задача залишалася
невирішеною. Але зараз на ринку супутникового моніторингу працює все більше
висококваліфікованих інженерів, яким все-таки під силу знайти рішення задачі
коректного отримання таких даних, як:
-
обороти двигуна;
-
рівень палива в баку;
-
пробіг автомобіля;
-
температура охолоджуючої рідини двигуна
ТЗ;
Рішення, яке буде запропоновано
в даній роботі, полягає в зчитуванні даних з CAN-шини автомобіля.
Завдання зчитування даних з
CAN-шини з'явилася як наслідок завдання оптимізації витрат на експлуатацію
автотранспорту.
Відповідно типовими запитами
замовників, автомобілі та спецтехніка оснащуються системою супутникового
ГЛОНАСС або GPS моніторингу та системою контролю обороту палива (на базі
погружних або ультразвукових датчиків рівня палива).
Але практика показала, що
замовники все частіше цікавляться більше економічними способами одержання
даних, а також такими, які не вимагали б серйозного втручання в конструкцію, а
також електрику автомобіля.
Саме таким рішенням стало
отримання інформації з CAN-шини. Адже воно має цілий ряд переваг:
-економія на додаткових пристроях -
не потрібно нести значних витрат на придбання та установку різних датчиків і
пристроїв.
-
збереження гарантії на автомобіль -
виявлення виробником стороннього втручання в конструкцію або електрику
автомобіля загрожує практично гарантованим зняттям транспортного засобу з
гарантії. А це явно не входить в сферу інтересів автовласників.
-
отримання доступу до інформації з штатно
встановлених електронних пристроїв і датчиків - залежно від електронної системи
в автомобілі може бути штатно реалізований певний набір функцій. До всіх цих
функцій, теоретично, ми можемо отримати доступ через CAN-шину. Це може бути
пробіг, рівень палива в бензобаку, датчики відкриття / закриття дверей,
температура за бортом і в салоні, обороти двигуна, швидкість руху.
У даній роботі для тестування
даного рішення був обраний прилад Galileo Глонасс (рис. 5.1). Він має
вбудований дешифратор FMS і може зчитувати інформацію безпосередньо з CAN-шини
автомобіля.

Рисунок 5.1 – прилад
Galileo Глонасс
5.2
Переваги та недоліки рішення
Переваги:
-
можливість роботи в режимі жорсткого
реального часу.
-
простота реалізації і мінімальні витрати
на використання.
-
висока стійкість до перешкод.
-
надійний контроль помилок передачі і
прийому.
-
широкий діапазон швидкостей роботи.
-
велике поширення технології, наявність
широкого асортименту продуктів від різних постачальників.
Недоліки:
-
Максимальна довжина мережі обернено
пропорційна швидкості передачі.
-
Великий розмір службових даних в пакеті
(по відношенню до корисних даними).
-
Відсутність єдиного загальноприйнятого
стандарту на протокол високого рівня.
Стандарт мережі надає широкі
можливості для практично безпомилкової передачі даних між вузлами, залишаючи
розробникові можливість вкласти в цей стандарт все, що туди зможе поміститися.
В цьому відношенні CAN-шина подібна простому електричному дроту. Туди можна
«запхати» будь-який потік інформації, який зможе витримати пропускна здатність
шини.
Відомі приклади передачі звуку
і зображення по шині CAN. Відомий випадок створення системи аварійного зв'язку
вздовж автодороги довжиною кілька десятків кілометрів (Німеччина). (У першому
випадку потрібна була велика швидкість передачі і невелика довжина лінії, у
другому випадку - навпаки).
Виробники, як правило, не
афішують, як саме вони використовують корисні байти в пакеті. Тому FMS
прилад
не завжди може розшифрувати дані, які «віддає» CAN-шина. Крім того, не всі
марки автомобілів мають CAN-шину. І навіть не всі автомобілі однієї марки і
моделі можуть видавати однакову інформацію
5.3
Приклад реалізації рішення.
Для моніторингу
автотранспорту беремо вантажні автомобілі іноземного виробництва. Зокрема,
вантажні автомобілі Scania P340 (рис. 5.2).

Рисунок 5.2 - Вантажний
автомобіль Scania P340
Результати виявилися наступними:
-
з першого дані отримані так і не були;
-
з другого був отриманий тільки пробіг;
-
з третього були отримані всі цікавлять
дані (рівень палива, температура охолоджуючої рідини, обороти двигуна, загальна
витрата, загальний пробіг) (рис. 5.3).
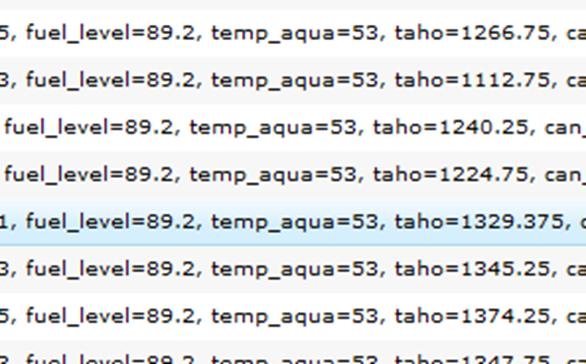
Fuel_level - рівень палива в баку в
%; Temp_aqua - Температура охолоджуючої рідини в градусах Цельсія; Тахо - Дані
з тахометра (об / хв).
Рисунок 5.3 - фрагмент повідомлення
з інформаційної системи Wialon
5.4
Реалізація рішення
Навігаційний прилад Галілея
ГЛОНАСС / GPS був підключений до CAN-шині вантажівок.
Дана модель автотрекера була
обрана через оптимального поєднання функціоналу, надійності і вартості. Крім
того, вона підтримує FMS (Система контролю палива) - систему, яка дозволяє
реєструвати і контролювати основні параметри використання транспортного засобу,
тобто підходить для підключення до CAN-шині.
Схему підключення до CAN-шини з
боку приладу Galileo можна знайти в керівництві користувача. Для підключення з
боку автомобіля необхідно, в першу чергу, знайти звиту пару проводів, яка
підходить до діагностичного роз'єму (рис 5.4). Діагностичний роз'єм завжди в
доступності і розташовується поблизу від рульової колонки (рис. 5.5). У 16 контактному
роз'ємі за стандартом OBD II це 6-CAN-високий, 14-CAN низький. Зверніть увагу,
що у проводів високої напруга приблизно 2,6-2,7 В, у проводів низького воно, як
правило на 0,2 В менше

Рисунок 5.4 – Діагностичний роз'єм
OBD II

Рисунок 5.5. - OBD
II
Ще одним унікальним рішенням,
яке було використане для зняття даних з CAN-шини, став безконтактний
считиватель даних CAN Crocodile (виробництво СП Технотон, м. Мінськ). Він
відмінно підходить для роботи з приладами Galileo.
Переваги технології CAN Crocodile:
-
CAN Crocodile дозволяє отримувати дані
про роботу автомобіля з шини CAN без втручання в цілісність самої шини.
-
зчитування даних відбувається без
механічного та електричного контакту з проводами.
-
CAN Crocodile застосовується для
підключення до шини CAN систем GPS / ГЛОНАСС моніторингу, які отримують
інформацію про режими роботи двигуна, стан датчиків, наявності несправностей і
т.д.
-
CAN Crocodile не порушує ізоляцію
проводів CAN і "слухає" обмін по шині за допомогою спеціального
бездротового приймача.
-
застосування CAN Crocodile абсолютно
безпечно для автомобіля, непомітно для роботи бортового комп'ютера,
діагностичного сканера та інших електронних систем. Особливо актуально
застосування CAN Crocodile для гарантійних автомобілів, в яких підключення будь-яких
електронних пристроїв до шини CAN часто є приводом для зняття з гарантії.
Якщо дроти виявлені та
ідентифіковані вірно, можна приступати до запуску CAN-сканера в приладі Galileo.
-
вибирається стандарт FMS, швидкість для
більшості автомобілів 250 000.
-
запускається сканування.
-
після закінчення сканування відбувається
перехід на головну сторінку конфігуратора. Якщо сканування завершено успішно,
ми отримуємо доступ до розшифрованим даними.
Якщо нічого, крім «кінця
сканування» Ви не побачили, тут є кілька варіантів. Або було неправильно
здійснено підключення, або автомобіль з якихось причин не видає дані, або
приладу невідомий шифр даної CAN-шини. Як вже було сказано, таке трапляється
досить часто, оскільки поки що не існує єдиного стандарту для передачі даних та
їх обробки по CAN. На жаль, як показує практика, отримати повні дані з CAN-шини
не завжди вдається.
Але є ще один момент, який
важливо торкнутися. Найчастіше основною метою клієнтів є контроль рівня і
витрати палива.
5.4.1 Практична цінність даних
зі штатних датчиків. Справа в тому, що основне призначення штатних датчиків
рівня палива - дати оцінку з тим ступенем точності, яка здається правильною
виробнику ТЗ. Ця точність не може бути зрівнена з точністю, яку дає погружний
датчик рівня палива (ДРП) виробництва Омнікомм або, наприклад, Технотон.
Одна з головних задач, яку
вирішує штатний ДРП, це щоб паливо раптово не закінчилося, і водій розумів
загальну ситуацію з рівнем палива в баку. Від простого за своїм устроєм
штатного поплавкового датчика складно очікувати великої точності. Крім того,
бувають випадки, коли штатний датчик спотворює дані (наприклад, коли транспорт
розташовується на схилі).
ВИСНОВКИ
В даній роботі було розглянуто
історію виникнення різних інтерфейсів зв’язку, причини їх виникнення та
еволюцію. Історію та причини виявлення CAN
інтерфейсу.
Система CAN
забезпечена
великою кількістю мікросхем, забезпечуючи роботу підключених до магістралі
приладів, розробку яких починала фірма BOSH
для
використання в автомобілях, і в існуючий час широко використовуваних в
автоматизації виробництва.
Результатом дослідження було
виявлено що серед аналогів найбільш універсальною шиною комунікації між
різноманітними БУ являється CAN-Datenbus.
Протокол CAN
застосовується
в real-time
системах
для рішення різноманітних задач.
Знаючи те що шина CAN
володіє доступом до інформації всіх датчиків, і має інформацію недоступну
звичайним власникам (водіям) автомобілів, було запропоновано спосіб, за
допомогою якого можливо отримати доступ до показників штатних датчиків
автомобіля без установки додаткових. Взявши на увагу завдання більшості
замовників та враховуючи надійність, мінімальні витрати, високу стійкість, збереження
гарантії на авто та можливість роботи в режимі жорсткого реального часу. У
даній роботі для тестування даного рішення був обраний прилад Galileo
Глонасс.
Він має вбудований дешифратор FMS
і
може зчитувати інформацію безпосередньо з CAN-шини
автомобіля. Також було запропоновано унікальне рішення, яке було використане
для зняття даних з CAN-шини,
після чого була можливість отримати дані без втручання в цілісність самої шини.
Тобто зчитування відбувається без механічного та електричного контакту з проводами,
а за допомогою спеціального бездротового приймача, що є унікальним методом і
цілком безпечним, не має аналогів і має актуальність на теперішній час.