Рынок труда Швеции
Введение
В
настоящее время имеется большое количество различных пакетов прикладных
программ (ППП), используемых в инженерной практике. Графические интерфейсы
многих ППП представляют собой стандартный многооконный интерфейс с ниспадающими
и разворачивающимися меню и с характерными для Windows-приложений разделами:
File, Edit, Options, Windows и т.д. Поэтому,
освоив один из пакетов, пользователь сравнительно легко может перейти к
использованию и других ППП.
Пакеты программ
схемотехнического проектирования и моделирования семейства Micro-Cap (Microcomputer Circuit
Analysis Program – «Программа анализа схем на микрокомпьютерах») фирмы
Spectrum Software относятся к наиболее популярным
системам автоматизированного проектирования электронных устройств. Последние
версии Micro-Cap (далее МС), обладая большими сервисными
возможностями, позволяют выполнять графический ввод и редактирование
проектируемой схемы, проводить анализ характеристик аналоговых, цифровых и
смешенных аналого-цифровых устройств. С помощью МС можно осуществить анализ
электрических схем по постоянному току, рассчитать переходные процессы и
частотные характеристики проектируемых схем, провести оптимизацию параметров
схемы. Программы МС имеют средства синтеза пассивных и активных аналоговых
фильтров, средства моделирования функциональных схем аналоговых и цифровых
устройств, обладают возможностями построения 3-мерных графиков результатов
моделирования и многое другое.
1. Электрические цепи
первого порядка
Электрические схемы RC- и RL-цепи с подсоединенными к ним источниками напряжения e(t) показаны на рис. 1.
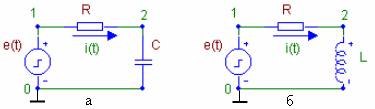
Рис. 1
Простейшие электрические цепи,
содержащие один энергоемкий элемент (конденсатор или индуктивность),
описываются дифференциальными уравнениями первого порядка и поэтому называются
электрическими цепями первого порядка. Цепи первого порядка обладают свойством
инерционности, т.е. быстрое изменение приложенного к цепи напряжения
независимого источника e(t) приводит к плавным изменениям напряжения
на емкости (рис. 1, а) или тока в индуктивности (рис. 1, б).
При скачке напряжения e(t) = E0 ·1(t) на входе RC-цепи
происходит заряд конденсатора током i(t). По мере увеличения заряда на
обкладках конденсатора увеличиваются напряжение на конденсаторе UC(t) и энергия электрического поля, накапливаемого в
конденсаторе. Для увеличения энергии конденсатора внешние силы (э. д. с.
источника) должны совершить продолжительную работу, преодолевая силу
кулоновского поля конденсатора C и
сопротивление резистора R.
Поэтому напряжение на конденсаторе в RC-цепи меняется плавно, стремясь к величине скачка входного воздействия E0:
 .
.
Величина τ = RC называется постоянной времени и
является важной характеристикой RC-цепи,
определяющей скорость заряда конденсатора. Ток в цепи определяется выражением  , а напряжение на резисторе будет
меняться по закону
, а напряжение на резисторе будет
меняться по закону  .
.
В RL-цепи (рис. 1, б) изменение тока i(t) от внешнего
источника e(t), протекающего через индуктивность, порождает явление
самоиндукции, т.е. возникновение индукционного тока за счет изменения магнитного
потока, сцепленного с индуктивностью L. Возникающая вследствие этого э. д. с. самоиндукции препятствует
изменению тока в RL-цепи. Поэтому
при подаче на вход RL-цепи скачка
напряжения e(t) = E0 ·1(t) ток в цепи будет плавно увеличиваться, стремясь к своему
максимальному значению I0 = E0/R. При этом
увеличивается и энергия магнитного поля, накапливаемого в индуктивности.
Постоянная времени RL-цепи
определяется как τ = L/R и характеризует скорость изменения
тока в цепи при воздействии на RL-цепь
единичного скачка напряжения:  . Напряжение на
резисторе, очевидно, будет меняться по закону
. Напряжение на
резисторе, очевидно, будет меняться по закону  .
.
Линейные цепи первого порядка широко
применяются для преобразования формы импульсных сигналов. Например, если в RC-цепи выходной сигнал снимается с
емкости (рис. 6, а), то такая RC-цепь
выполняет операцию приближенного интегрирования входного сигнала и называется
интегрирующей RC-цепью. Если же выходной сигнал
снимается с сопротивления, то RC-цепь
выполняет операцию приближенного дифференцирования и называется
дифференцирующей RC-цепью.
Интегрирующая RC-цепь работает как фильтр нижних частот
(ФНЧ), пропуская низкочастотные колебания и подавляя высокочастотные.
Дифференцирующая RC-цепь напротив
пропускает высокочастотный сигнал и подавляет низкочастотный, т.е. работает как
фильтр высоких частот (ФВЧ).
RL-цепь (рис. 1, б) так же можно рассматривать
как интегрирующую (выходной сигнал UR(t) снимается с
резистора) или дифференцирующую (выходной сигнал – UL(t)) цепь и соответственно как фильтр нижних (ФНЧ) или высоких
(ФВЧ) частот.
На рис. 7 приведены эпюры
воздействующего напряжения e(t), напряжения UC(t) и тока iL(t) в рассмотренных схемах, полученные
с помощью МС8. На графиках рис. 7 также показаны величины постоянных времени τ1
и τ2 соответственно для RC- и RL-цепей.
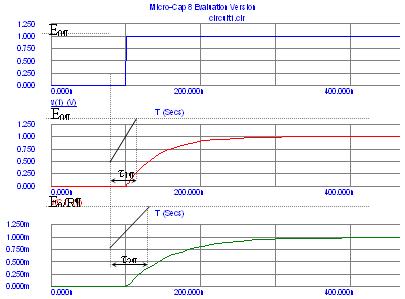
Рис. 2
Радиотехнические схемы, как правило,
обладают частотно-избирательными свойствами, т.е. при воздействии на вход схемы
гармонического колебания коэффициент передачи схемы (от входа к выходу) зависит
от частоты входного сигнала. Зависимость К(f) = =Umвых/Umвх, где Umвых и Umвх – амплитуды выходного и входного
колебаний, называется амплитудно-частотной характеристикой (АЧХ). Частота, на
которой коэффициент передачи К(f) =
0.707 (-3дБ), называется граничной (fГР) и для
фильтров ФНЧ и ФВЧ она рассчитывается по формуле fГР = 1/2πτ. Поскольку при расчете АЧХ (режим анализа AC) программа МС8 подает на вход схемы колебание переменной
частоты с амплитудой 1 В, то К(f) = Umвых. Это значит, что для получения в
режиме АС амплитудно-частотной характеристики необходимо в окне задания
параметров моделирования (AC Analysis Limits) ввести переменную, определяющую напряжение в точке
выхода схемы (V(2) – для схем, изображенных на рис.
1. При изменении частоты воздействующего колебания меняется не только амплитуда
выходного сигнала, но и фаза выходного колебания при неизменной фазе входного
гармонического воздействия. Зависимость фазового сдвига от частоты называется
фазочастотной характеристикой (ФЧХ) схемы. Для получения ФЧХ достаточно в окне AC Analysis Limits ввести переменную ph(V(1)). На рис. 8
показаны АЧХ и ФЧХ фильтра нижних частот (рис. 1, а), полученные с помощью
программы МС8. На графиках отмечены точки, соответствующие верхней граничной
частоте fГР = 3,7 МГц, фазовый сдвиг на fГР составляет 44,990. Для
определения координат этих точек использовались команды:
 Go to Y (Shift+Ctrl+Y) – перемещение выбранного электронного курсора в ближайшую
точку с заданной координатой по оси Y;
Go to Y (Shift+Ctrl+Y) – перемещение выбранного электронного курсора в ближайшую
точку с заданной координатой по оси Y;
 Go to X (Shift+Ctrl+X) – перемещение выбранного электронного курсора в точку с
заданной координатой по оси X;
Go to X (Shift+Ctrl+X) – перемещение выбранного электронного курсора в точку с
заданной координатой по оси X;
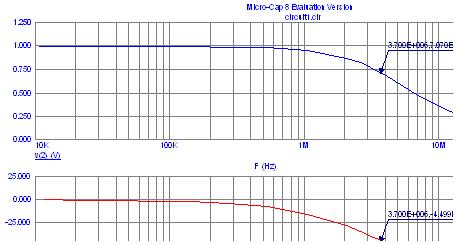
Рис. 3
2. Электрические цепи
второго порядка
Электрические цепи
второго порядка содержат два энергоемких элемента - конденсатор и
индуктивность. Математической моделью таких цепей служит дифференциальное
уравнение второго порядка, поэтому порядок цепи так же равен двум. В идеале
резистор в этих цепях может отсутствовать (R = 0), однако и соединительные проводники и катушка
индуктивности имеют сопротивления, отличные от нуля (R > 0). Поэтому цепи второго порядка иногда называют RLC-цепями. В зависимости от того, каким
способом в цепи соединены между собой индуктивность и конденсатор
(последовательное или параллельное соединение), различают последовательный и
параллельный колебательные контуры (рис. 4).
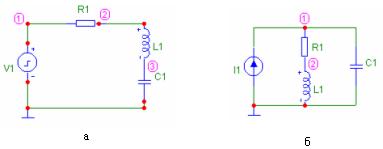
Рис. 4
RLC-цепи качественно отличаются от цепей
первого порядка. В частности, в зависимости от соотношений между величинами
элементов цепи переходные процессы в RLC-цепи носят апериодический (как в цепях первого порядка) или
колебательный характер. В частотной области RLC-цепь обладает резонансными свойствами и
рассматривается как узкополосный фильтр.
При выполнении
моделирования переходных процессов в последовательном колебательном контуре ко
входу схемы следует подключить источник импульсного напряжения (V1) с нулевым внутреннем
сопротивлением, например Pulse Source (рис. 4,
а). Тогда при окончании импульсного воздействия (т.е. при V(1) = 0) в RLC-цепи начинаются переходные процессы, зависящие только
от величины заряда, накопленного в конденсаторе, и от параметров самой цепи.
По этим же соображениям
ко входу параллельного колебательного контура (рис. 4, б) подключен источник
импульсного тока с нулевой проводимостью. Тогда по окончании импульсного
воздействия тока (I(0,1) = 0) только
энергия магнитного поля, накопленная в индуктивности, и параметры схемы будут
определять характер переходных процессов в контуре.
RLC-цепь характеризуется следующими
параметрами:
 - резонансная частота цепи (рад/с);
- резонансная частота цепи (рад/с);
 - декремент затухания, определяет
скорость спада свободных колебаний в цепи;
- декремент затухания, определяет
скорость спада свободных колебаний в цепи;
 - частота свободных колебаний цепи
(рад/с);
- частота свободных колебаний цепи
(рад/с);
 - добротность RLC-цепи.
- добротность RLC-цепи.
Частота f, выраженная в герцах, связана с
круговой частотой ω известным соотношением: f = ω/2π [Гц].
При Q < 0,5 переходные процессы в цепи
носят апериодический характер. Например, в схеме, приведенной на рис. 9, а,
заряженный предварительно от источника V1 конденсатор C1
будет разряжаться через последовательно соединенные индуктивность L1, резистор R1 и внутреннее сопротивление источника (равное нулю).
Энергия, накопленная в конденсаторе, будет полностью рассеяна в резисторе R1.
При Q > 0,5 RLC-цепь имеет режим свободных колебаний. Т.е. после
окончания воздействия импульсного сигнала в RLC-цепи начинается колебательный процесс. В схеме рис.
9, а энергия, накопленная в конденсаторе (энергия электрического поля) в
процессе его разряда перейдет в энергию магнитного поля индуктивности, что в свою
очередь, вследствие самоиндукции, приведет к перезарядке конденсатора и т.д.
Возникшие в RLC-цепи колебания напоминают колебания
механического маятника, которые постепенно затухают из-за потерь при трении в
подвеске маятника. Подобную роль в RLC цепи выполняет сопротивление резистора R1, препятствующего протеканию тока в контуре. При  запас энергии, накопленный в цепи, в
процессе возникших колебаний будет рассеиваться в сопротивлении R1, постепенно снижаясь до нуля.
запас энергии, накопленный в цепи, в
процессе возникших колебаний будет рассеиваться в сопротивлении R1, постепенно снижаясь до нуля.
В случае, когда
добротность контура Q >> 1,
возникшие в RLC цепи колебания носят устойчивый и
продолжительный характер. В колебательном контуре отдельный резистор, как
правило, отсутствует, однако при анализе схемы сопротивление R, обусловленное потерями в
индуктивности, конденсаторе и монтажных проводниках, необходимо учитывать. Чем
меньше сопротивление потерь, тем более узкополосным является фильтр.
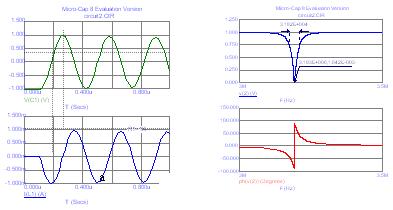
Рис. 5
На рис. 5, б изображены
АЧХ и ФЧХ последовательного контура (выходное напряжение снимается с узла 2
схемы рис. 4, а). На резонансной частоте (f0 = 3,183 МГц) коэффициент передачи цепи близок к нулю,
поэтому такой фильтр называют режекторным. Полоса режекции фильтра по уровню
0,707 составляет 31,83 кГц. Для измерения полосы режекции (или полосы
пропускания фильтра, показанного на рис. 4, б) и нанесения на график
горизонтальной размерной линии необходимо в режиме электронного курсора
воспользоваться командами Go to Y () и Tag Horizontal.
3. Элементы нелинейных
цепей
В линейных цепях
параметры используемых элементов (резисторы, конденсаторы, индуктивности) не
зависят от значений приложенных к ним напряжений или протекающего через них
тока. Однако линейная теория анализа цепей оказывается справедливой только в
определенных пределах этих значений. Так, сопротивление R= 10 Ом означает, что отношение
падения напряжения на элементе к протекающему через него току равно десяти,
независимо от величины этого тока. В действительности же любой реальный элемент
таким постоянством не обладает. Например, сопротивление реальных резисторов
зависит от температуры, которая в свою очередь определяется не только
окружающей средой, но и тепловой энергией, рассеянной в резисторе за счет
протекающего через него тока.
На практике при анализе
линейных цепей непостоянством параметров элементов цепи часто пренебрегают в
силу незначительности их изменений. В частности, зависимость сопротивления
резистора от тока можно существенно уменьшить, если при проектировании схемы
применить в электрической схеме резистор, способный рассеять расчетную
мощность, преобразованную в теплоту. Тогда температура резистора, а значит и его
сопротивление, будет определяться в основном температурой окружающей среды,
т.е. условиями эксплуатации проектируемого устройства.
Существует обширный класс
радиотехнических элементов и устройств, параметры которых существенно зависят
от токов или напряжений. Такие элементы называются нелинейными (НЭ) и широко
используются в радиотехнике. Для количественного описания свойств НЭ необходимо
задать зависимости, определяющие связь между параметром элемента и величиной
приложенного напряжения или тока. Такие зависимости принято называть
характеристиками нелинейного элемента. В зависимости от типа характеристики
можно выделить следующие простейшие нелинейные элементы.
Нелинейный резистивный
элемент – полностью определяется зависимостью между током и напряжением: i=f(u) или u=f(i). Данная
зависимость называется вольт-амперной характеристикой (ВАХ) нелинейного
элемента. Примерами резистивных НЭ являются диоды, стабилитроны, варисторы и
др.
Нелинейная емкость –
характеризуется нелинейной зависимостью накопленного заряда от приложенного
напряжения, т.е. по сути, зависимостью емкости элемента от напряжения: C=f(u), называемой
вольт-фарадной характеристикой. В качестве примера элемента с нелинейной
емкостью следует назвать варикап, который широко используется в радиоприемных и
передающих устройствах для изменения резонансной частоты колебательных
контуров.
Нелинейная индуктивность
– характеризуется нелинейной связью потокосцепления и тока, которая задается
функцией: L=f(i).
В качестве примера более
сложного нелинейного устройства следует отметить транзисторы, которые относятся
к классу безынерционных нелинейных четырехполюсников (рис.6). В этих
полупроводниковых приборах выходной ток (в случае биполярного транзистора - ток
коллектора) является сложной функцией не только напряжения, приложенного к
коллектору, но и тока в базе транзистора.
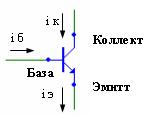
Рис. 6
Нелинейность
характеристик рассмотренных выше элементов принципиальна для их
функционирования в составе соответствующих электронных устройств
4. Основные этапы
моделирования
1. Моделирование схем с
резистивным НЭ

Рис. 7
1.1. Собрать схему, показанную на
рис.7. Выбрать одну из доступных моделей диодов, например 1S2460. В режиме DC Analysis задать параметры для первой
варьируемой переменной: Method
– Auto, Name – V1, Range – 2 (изменение переменной V1 в диапазоне 0…2 В). В качестве
независимой переменной указать напряжение на аноде диода V(1), а в окне X Expression задать переменную I(D1). Включите опцию Auto Scale Ranges и построить ВАХ. Используя режим
электронного курсора (Cursor Mode), измерить
сопротивление диода на линейном участке ВАХ. Для этого расположить левый и
правый курсоры на линейном участке полученного графика на некотором расстоянии
друг от друга. Параметр Slope
(тангенс угла) для переменной I(D1), который в режиме Cursor Mode находится в нижней части окна графиков, по сути, определяет
проводимость диода, а сопротивление – это величина, обратная проводимости.
Задав в окне Analysis Limits диапазон измерения температуры –40…+70 С0
и включив линейную (Linear) шкалу
изменения температуры, повторите моделирование в режиме DC. С помощью команды Label Branches определить температуру для каждой из
полученных ВАХ.
1.2. Заменить диод D1 в схеме рис. 12 на стабилитрон (Zener Diode), подсоединив его катодом к плюсу источника
(встречное включение). Стабилитрон можно «сконструировать» самостоятельно, если
в качестве модели диода выбрать GENERIC,
а в открывшемся окне задания параметров моделирования диода установить,
например, следующие значения: BV = 3
В (напряжение пробоя), RS = 4
Ом (объемное сопротивление диода). Построить ВАХ стабилитрона, задав пределы
изменения напряжения источника V1 в
пределах 0…4 В. Измерить напряжение стабилизации (пробоя).
1.3. Собрать схему дифференцирующей RC-цепи (рис. 8), подключив параллельно
нагрузочному резистору R2
диод D1, используемый в п. 1.1.
Сопротивление R1 = 50 Ом имитирует внутреннее
сопротивление генератора V1.
Рис. 8
Значения величин R2, C1 выбрать из табл. 2 и установить следующие параметры
генератора V1: амплитуда импульса – 10 В, начало
переднего фронта – 0,1 мкс, длительность импульса TИ = 5R1C1, период повторения T = 2TИ. В режиме Transient построить графики функций: V(1), V(R1), V(3).
Поменять полярность включения диода и
повторить п. 1.3. Проанализировать полученные результаты.
1.4. Собрать схему, приведенную на
рис. 14, подключив к электрической цепи генератор Sine Source. Выбрать модель генератора – GENERAL и задать следующие параметры для моделирования:
F = 1 кГц; A = 10 В; DC = 0; PH = 0; RS = 1 Ом; RP = 0; TAU = 0.

Рис. 9
Схема рис. 9 представляет собой
простейший однопериодный выпрямитель переменного тока. Резистор R1 служит в качестве нагрузки
выпрямителя. Построить графики V(1), V(R1) и I(D1), задав максимальное время
моделирования 10 мс. Графики V(1) и
V(R1) разместить в одном графическом окне. Используя режим Cursor Mode и команду Tag Vertical, измерить
величину пульсаций выходного сигнала (ΔU = UМАКС–UМИН) в конце переходного процесса, выделив курсором
соответствующий фрагмент графика (команда Scale).
Провести многовариантный анализ схемы
рис. 14, задав изменение величины резистора R1 в пределах 10…150 Ом с шагом 100 Ом. Определить характер
влияния нагрузки на величину выходного напряжения.
1.5. Собрать схему, показанную на
рис. 10, добавив в схему рис. 9
стабилизирующую цепочку, состоящую из исследованного ранее стабилитрона (п.1.2)
и резистора R2. Резистор R3 выполняет роль нагрузочного сопротивления стабилизатора
напряжения. Провести анализ схемы в режиме Transient, построив графики V(1), V(2), V(3) в
одном графическом окне, а график I(D2) – в другом. Измерить
стабилизированное напряжение, вырабатываемое схемой (узел 3). При проведении
эксперимента убедиться, что значение параметра BV диода D1
равно 30 В, а диода D2 – 3 В.

Рис. 10
1.6. Заменить в схеме рис. 15
источник переменного напряжения на источник постоянного напряжения (Battery – пиктограмма  ), установив величину напряжения
источника 10 В. Вызвать диалоговое окно Preferences (пиктограмма
), установив величину напряжения
источника 10 В. Вызвать диалоговое окно Preferences (пиктограмма  ) и на закладке Options включить опцию Circuit Show Slider (размещение на схеме движковых переключателей
номиналов резисторов и батарей). Провести анализ схемы в режиме постоянного
тока (режим Dynamic DC) при V1 =
10 В. Определить значения узловых потенциалов, токов в ветвях схемы и
мощностей, рассеиваемых на элементах схемы.
) и на закладке Options включить опцию Circuit Show Slider (размещение на схеме движковых переключателей
номиналов резисторов и батарей). Провести анализ схемы в режиме постоянного
тока (режим Dynamic DC) при V1 =
10 В. Определить значения узловых потенциалов, токов в ветвях схемы и
мощностей, рассеиваемых на элементах схемы.
Меняя с помощью движкового
переключателя напряжения на батарее V1, определить диапазон изменения напряжения в узле 1 схемы, при котором
стабилитрон выполняет свои стабилизирующие функции, т.е. поддерживает
постоянное напряжение в узле 3, близкое к измеренному в п.1.5. Номиналы других
компонентов схемы не менять.
2.
Исследование
характеристик транзистора
2.1. Исследовать вольт-амперную
характеристику транзистора, для чего собрать схему рис. 16, установив следующие
параметры моделирования: I1 = 1
мА, V1 = 5 В. В качестве транзистора Q1 выбрать модель 2N2368.
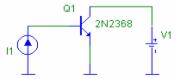
Рис. 11
Включить режим DC и в строке Variable 1 задать имя первой варьируемой
переменной - V1 с диапазоном изменения 0…5 В. Для
второй переменной (Variable 1)
указать имя I1 с диапазоном изменения 0…5 мА и с
шагом 0,5 мА. Установить линейный метод варьирования обеих переменных. Для
построения графика задать по оси X
переменную Vce(Q1) – напряжение между коллектором и эмиттером транзистора Q1, а по оси Y указать переменную Ic(Q1) – ток
коллектора. Включить опцию Auto Scale Ranges и построить вольт-амперные
характеристики транзистора. Используя команду Label Branches, выявить зависимость характеристик Ic(Vce) от тока базы I1.
2.2. Собрать схему транзисторного
усилителя, показанную на рис. 17. В качестве источника входного сигнала V1 использовать источник Sine Source, выбрав модель генератора – «1МГц» и задав амплитуду
синусоидального сигнала 0,1 В. Используя режим Transient построить графики входного (V(V1)) и выходного (Vc(Q1)) напряжений.
Рис. 13
Измерить размах входного (ΔUВХ) и выходного (ΔUВЫХ) сигнала и рассчитать коэффициент
усиления К = ΔUВЫХ /ΔUВХ.
В режиме многовариантного анализа
познакомиться с работой усилителя, установив вариацию входного напряжения в
диапазоне 0.1…0.6 В с шагом 0.3 В. Определить величину входного сигнала, при
котором наблюдаются искажения выходного сигнала.
2.3. Построить амплитудно-частотную и
фазочастотную характеристики усилителя, установив в режиме AC диапазон изменения частоты 1…100
МГц. Определить полосу пропускания усилителя.
2.4. Провести анализ режима схемы по
постоянному току (Dynamic
DC), отключив опцию Circuit Show Slider в окне Preferences.
Выйти из программы МС, не
сохраняя содержимого рабочего окна.
электрический
цепь схема моделирование программа
Заключение
Перечисленные
достоинства делают пакет программ MicroCAP-7 весьма привлекательным для
моделирования электронных устройств средней степени сложности. Удобство в
работе, нетребовательность к ресурсам компьютера и способность анализировать
электронные устройства с достаточно большим количеством компонентов позволяют
успешно использовать этот пакет в учебном процессе. В данной работе рассмотрены
лишь основные сведения, необходимые для начала работы с пакетом и анализа
большинства электронных схем, изучаемых в специальных дисциплинах и
используемых при курсовом и дипломном проектировании. В случае необходимости дополнительные
(и более подробные) сведения могут быть получены из встроенной подсказки
системы (вызывается клавишей <F1> или через меню HELP/Contens).
Библиографический список
1.
Косс В.П.
Схемотехническое проектирование и моделирование в среде Micro-Cap 8: учебн. пособие. Рязан. гос. радиотехн. ун-т –
Рязань, 2007. 80 с.
2.
Разевиг В.Д.
Схемотехническое моделирование с помощью Micro-Cap 7.
– М.: Горячая линия – Телеком, 2003. 368 с.
3.
Крылов В.В.,
Корсаков С.Я. Основы теории цепей для системотехников. – М.: Высш. школа. 1990.
224 с.