Электропривод по схеме преобразователь частоты - асинхронный двигатель
Министерство
образования и науки Украины
ОДЕССКАЯ
ГОСУДАРСТВЕННАЯ АКАДЕМИЯ ХОЛОДА
КАФЕДРА
ЭЛЕКТРОТЕХНИКИ И ЭЛЕКТРОННЫХ УСТРОЙСТВ
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ
ЗАПИСКА
к курсовому проекту
«ЭЛЕКТРОПРИВОД
ПО СХЕМЕ ПРЕОБРАЗОВАТЕЛЬ
ЧАСТОТЫ
- АСИНХРОННЫЙ ДВИГАТЕЛЬ»
по дисциплине
элементы
и системы автоматизированного электропривода
Оглавление
Введение
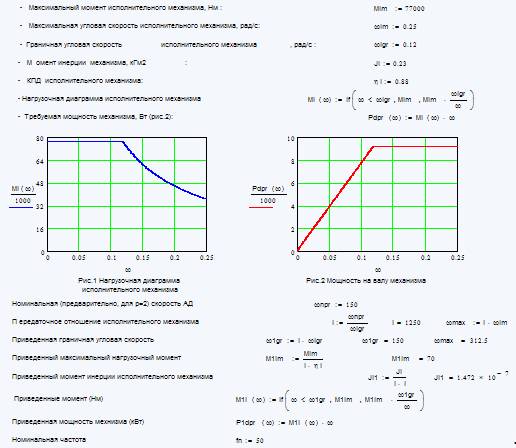
1. Исходные данные и Построение нагрузочной диаграммы
исполнительного механизма
2. Выбор элементов силовой схемы
2.1 Выбор двигателя и определение его параметров
2.2 Выбор автоматического воздушного выключателя
2.3 Выбор преобразователя частоты
3. Расчет механических характеристик
3.1 Параметры механических характеристик
3.2 Естественная характеристика
3.3 Искусственные характеристики
3.4 Искусственные характеристики при пониженном
напряжении
3.5 Механические характеристики при экстренном
торможении
4. Оценка необходимости применения обратной связи по
скорости
5. Определение среднего КПД системы
6. Переходные процессы в электроприводе
Вывод
Список литературы
Введение
В настоящее время
практически любой производственный механизм приводится в действие
автоматизированной системой, одним из основных элементов которой,
непосредственно преобразующим электрическую энергию в механическую, является
электрический двигатель. При помощи соответствующих преобразовательных и
управляющих устройств формируются требуемые статические и динамические
характеристики исполнительных органов рабочей машины.
Типичная
электромеханическая система включает электрический двигатель, а также
преобразовательное, передаточное и управляющее устройства, предназначенные для
приведения в движение и управления исполнительным органом рабочей машины.
Речь идет не только о
сообщении рабочему органу вращательного или поступательного движения, но,
главным образом, об обеспечении оптимального режима работы системы в целом, при
котором достигается наибольшая производительность при требуемой точности.
В данном курсовом
проекте рассматривается электротехническая система переменного тока,
использующая короткозамкнутый асинхронный двигатель, питающийся от
полупроводникового преобразователя частоты.
Широкому
распространению данной системы способствовало появление сравнительно дешевых и
достаточно мощных (до 300 кВт в серийном варианте) транзисторных (реже –
тиристорных) преобразователей частоты (ПЧ).
Частотный способ
регулирования является наиболее перспективным и широко используемым в настоящее
время способом регулирования скорости АД. Изменяя частоту f1 питающего
напряжения, можно, в соответствии с выражением ω0
= 2.p.f1/p,
изменять угловую скорость вращения магнитного поля, получая тем самым различные
искусственные характеристики асинхронного двигателя.
Этот способ
обеспечивает плавное регулирование в широком диапазоне, получаемые
характеристики обладают высокой жесткостью. Электрические потери в роторе,
связанные со скольжением, в этом случае невелики, поэтому частотный способ
наиболее экономичен.
Для лучшего
использования АД и получения высоких энергетических показателей его работы –
коэффициента мощности, коэффициента полезного действия и перегрузочной
способности – одновременно с изменением частоты приложенного напряжения,
необходимо изменять и его величину.
Применяются различные
законы изменения напряжения в зависимости от характера нагрузки. Часто исходят
из условия сохранения постоянной перегрузочной способности l,
которая равна отношению критического момента Мк к моменту нагрузки Мс — l
= Мк / Мс = const.
Система ПЧ-АД, по своим
рабочим свойствам приближаясь к системам постоянного тока, одновременно
сохраняет все преимущества асинхронного двигателя, как-то - надежность,
долговечность, высокую перегрузочную способность, отсутствие щеточного контакта
(а значит и искрения) и т.п.
1.
Исходные данные и построение нагрузочной диаграммы
исполнительного механизма
2.
Выбор элементов силовой схемы
2.1
Выбор двигателя и определение его параметров
2.1.1
Определение мощности двигателя
Асинхронный двигатель выбираем (табл.П2)
таким образом, чтобы его номинальный момент был больше максимального момента,
найденного из нагрузочной диаграммы.
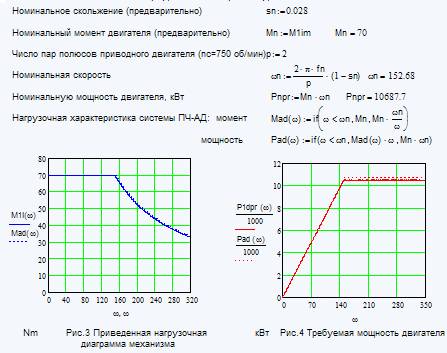
Видим, что приведенная нагрузочная
характеристика системы ПЧ-АД соответствует нагрузочной характеристике
механизма, так как для всех скоростей удовлетворяется неравенство Mad>M1mex.
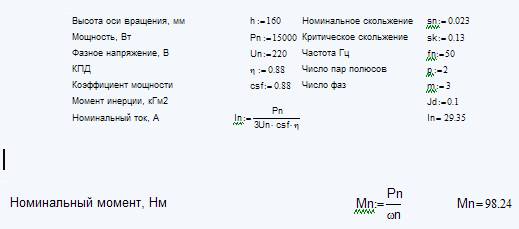
2.1.2
Параметры и характеристики двигателя
С учетом необходимого
запаса мощности выбираем четырехполюсный асинхронный двигатель 4A160S4
со следующими параметрами:
2.1.3
Параметры Г-образной схемы замещения
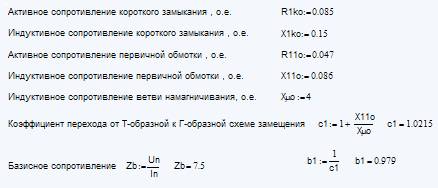
Параметры Т-образной схемы замещения.
Т – образная схема замещения трехфазной
(m1=3)
асинхронной машины строится для одной фазы, и, по существу, аналогична схеме
замещения трансформатора (рис. 1).
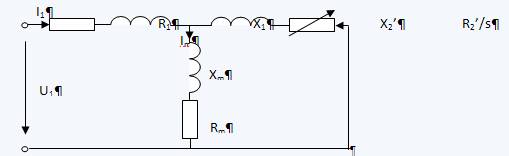
Рис. 1 Схема
замещения асинхронной машины
Здесь: U1
- фазное напряжение, В;
R1
и R2’
– активные сопротивления первичной и вторичной обмоток;
X1
= ω1.L1σ
и X2’
= ω1.L2’σ
– индуктивные сопротивления рассеяния первичной и вторичной обмоток, где ω1
=
2.π.f1
– циклическая частота сети, а f1
– частота сети;
Xm
и Rm – индуктивное
сопротивление намагничивающей ветви, обусловленное основным магнитным потоком,
и активное сопротивление, искусственно вносимое в схему замещения для учета
магнитных потерь в ферромагнитных частях магнитопровода;
I1,
I2’
– фазные токи в обмотках статора и ротора;
Im
-
ток намагничивания, создающий основной магнитный поток Фm;
Здесь индекс «штрих» (‘), относящийся ко
вторичной обмотке, обозначает, что данная величина приведена к первичной
обмотке.
2.2
Выбор автоматического воздушного выключателя
Силовые выключатели служат для
распределения электроэнергии в низковольтных установках в качестве аппаратов
защиты питающих линий и потребителей. Они защищают от перегрузки и короткого
замыкания установки, двигатели, генераторы и трансформаторы. Предназначены для
коммутации и защиты установок, двигателей, трансформаторов и конденсаторов.
Выбор автоматического
воздушного выключателя осуществляется по номинальному току двигателя.
Для этой цели могут
быть использованы трехфазные силовые автоматические выключатели серии 3VF
фирмы SIMENS.
Ток
уставки теплового расцепителя устанавливается на 30% больше номинального тока
двигателя Iu
= 1.3 In
2.3
Выбор преобразователя частоты
Частотный способ
регулирования является наиболее перспективным и широко используемым в настоящее
время способом регулирования скорости АД. Принцип его заключается в том, что
изменяя частоту питающего напряжения f1, можно, в соответствии с выражением
ω0 = 2..f1/p, изменять угловую
скорость вращения магнитного поля (синхронную скорость вращения ротора),
получая тем самым различные искусственные характеристики.
Этот способ
обеспечивает плавное регулирование в широком диапазоне, получаемые
характеристики обладают высокой жесткостью. Электрические потери в роторе,
связанные со скольжением, в этом случае невелики, поэтому частотный способ
наиболее экономичен
3.
Расчет механических характеристик
3.1
Параметры механических характеристик
Все
механические характеристики двигателя строятся совместно с механической
нагрузочной характеристикой механизма, приведенной к валу двигателя.
Вначале находим жесткость
естественной механической характеристики двигателя
 ,
,
где Mo
и о – момент и скорость холостого хода, а Mn
и n
– момент и скорость при номинальной нагрузке.
3.2
Естественная характеристика
Для построения естественной механической
характеристики(рис.5) используем формулу для момента асинхронной машины М(), в
которой явно показана зависимость момента от частоты (f) и напряжения (U):

Здесь: s (,0) = 1 - /0 – скольжение; - текущее значение угловой
скорости; 0 =2f/p
– угловая скорость магнитного поля при данной частоте f; р – число пар
полюсов; m – число фаз, для трехфазного двигателя m =3; U – текущее значение
фазного напряжения; R1 и R2’ – активные сопротивления, а L1 и L2’ –
индуктивности первичной и вторичной (приведенной к первичной) обмоток.
С помощью формулы для момента асинхронной машины
строим естественную механическую характеристику привода для номинальных
значений напряжения и частоты. На этом же графике строится нагрузочная
характеристика механизма.

Определив параметры естественной
механической характеристики строим график зависимости моментов от угловых
скоростей:
3.3
Механическая характеристика при экстренном торможении
Экстренное
торможение осуществляется в режиме динамического торможения, при котором в
обмотку статора - например на зажимы А и ВС, соединенные вместе, подается
постоянный ток. Предварительно необходимо задаться кратностью тока
динамического торможения Idt
по отношению к номинальному Кid
= Idt/ In,
которую выбирают в интервале 1.8 – 2.2 ( например Кid
= 2) и рассчитать величину тормозного тока, величину эквивалентного тока Ie
и добавочного сопротивления

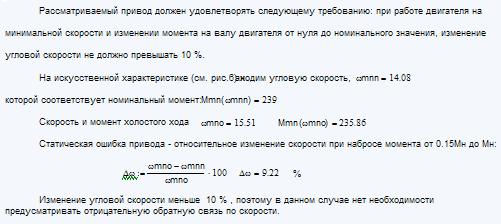
4.
Оценка необходимости применения обратной связи по скорости
5.
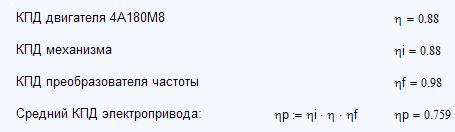
Определение среднего КПД системы
Средний КПД электропривода
определяется как произведение КПД двигателя, преобразователя частоты и
исполнительного механизма: ср = д.пч.m.
6.Переходные
процессы в электроприводе
Анализ
переходных процессов выполняется с помощью программы Matlab. В среде Matlab
собрали модель (рис.9), задали требуемые параметры(рис.10) ее элементов и
выполнить расчет переходного процесса для случая частотного пуска
ненагруженного двигателя с последующим 100% увеличением нагрузки.
Блок
Step осуществляет скачкообразный наброс
нагрузки по окончании пуска.
Широтно-импульсный
преобразователь вырабатывает переменную частоту, при частоте треугольной волны
модуляции обычно выбираемой в диапазоне 1500-3000 Гц.
Амплитуда
напряжения задается блоками Relay
A, Relay
B и Relay
С, и равна 220√2.
Связь
блоков Simulink и PSB
осуществляется через управляемые источники напряжения Controlled
Voltage Source
Vao, Vbo
и Vco.
Основной
особенностью данной модели является возможность наблюдать работу асинхронного короткозамкнутого
двигателя от преобразователя частоты, который изменяет одновременно как
напряжение, так и частоту, в соответствии с заданными законами.
Изменение
напряжения и частоты в функции времени задается блоками Fcn и Fcn1,
соответственно. На их входы подается время, а выходы определяют напряжение и
частоту (в относительных единицах), подводимые к двигателю.
Обычно
несколько лучшие результаты (с точки зрения сокращения времени пуска при
допустимых бросках тока и момента) получаются, если скорость возрастания
напряжения немного больше скорости возрастания частоты.
Зависимости
напряжения v(t) и частоты f(t) (в о.е.) от времени t при пуске могут быть
приняты линейными c ограничениями ( которые реализуются с помощью блоков
saturation)
v(u)
= kv.u; f(u) = kf.u, при ограничениях v(u) <1 и f(u) <1,
экспоненциальными
с одной постоянной времени Т
v(u)
= f(u) = 1- .exp(-.u/T),
или экспоненциальными с
двумя (близкими по величине) постоянными времени Т1 и Т2 (Т1>Т2),
что при правильном
выборе постоянных времени Т1 и Т2 дает, при несколько
увеличенном времени пуска, минимальные броски тока и момента.
Здесь во всех формулах вместо времени t
подставлена u – стандартная входная
переменная блока Fcn.
Экспоненциальный характер изменения v(t)
и f(t)
для Т=0.2 (экран Scope
v*,f*)
показан на рис.11. Одновременно на экране Scope
Vabm можно видеть характер изменения
напряжения, приложенного к статорной обмотке двигателя во время пуска (рис.12).
Промоделируем систему
без наброса нагрузки чтобы оценить параметры переходного процесса по скорости(рис
15):
Установившася скорость ωуст=157,5
Время 1го согласования t1=0.59c
Время переходного процесса τр=1,03с
Перерегулирование 
Изменяя параметры
модели, проследим их влияние пусковые параметры, такие как время пуска и
пусковые броски тока и момента.
Увеличив в полтора раза
момент нагрузки и момент инерции, моделируя тем самым незапланированный наброс
дополнительной нагрузки на вал двигателя проследим переходные процессы скорости
ω(t) и момента Te(t),
а также графики токов статора is(t)
и ротора ir(t)
при частотном пуске(рис16, 17).
Из графиков(рис16, 17)
видно, что повышение момента инерции и величины нагрузки негативно влияют на
пульсацию, и амплитуду роторных и статорных токов, а так же увеличивает время
переходных процессов. Однако выбранный двигатель справляется с нагрузкой. Таким
образом можно считать допустимым не продолжительное увеличение нагрузки. Так
как амплитуда тока превышает ток теплового расцепления автомата, длительная
работа в данном режиме не предусмотрена.
Обычно несколько лучшие
результаты (с точки зрения сокращения времени пуска при допустимых бросках тока
и момента) получаются, если скорость возрастания напряжения немного больше
скорости возрастания частоты. По этому в исходной модели увеличим скорость
изменения напряжения на 50%(рис.18, 19, 20) и проанализируем основные параметры
пуска(рис.21, 22)
Промоделируем систему
без наброса нагрузки чтобы оценить параметры переходного процесса по
скорости(рис 23):
Установившася скорость
ωуст=157,5
Время 1го согласования t1=0.43c
Время переходного процесса τр=1,04с
Перерегулирование 
Таким образом при
увеличении скорости изменения напряжения мы значительно уменьшаем время первого
согласования по скорости и время пусковых токов статора и ротора. Следовательно
мы можем уменьшить время наброса нагрузки с 1 до 0,6с. При этом значение
перерегулирования по скорости не превышает 20%, а величина пусковых токов не
превышает номинальные, что положительно сказывается на эксплуатационных
характеристиках двигателя.
Вывод
Мы
приобрели навыки для решения инженерных задач по расчету и проектированию
систем автоматизированного электропривода в статических и динамических режимах,
а так же навыков расчета параметров в программном пакете Mathcad
и моделирования в программном пакете Matlab
Simulink системы электропривода
«преобразователь частоты-асинхронный двигатель».
В
ходе разработки электропривода мы достигли диапазона регулирования скорости от
30 до 300 рад/с.
В
процессе моделирования при разных параметрах системы мы проследили переходные
процессы и дали им характеристику. Мы так же сделали следующие выводы:
·
Повышение
момента инерции и величины нагрузки негативно влияют на пульсацию, и амплитуду
роторных и статорных токов, а так же увеличивает время переходных процессов.
Однако выбранный двигатель справляется с нагрузкой. Таким образом можно считать
допустимым не продолжительное увеличение нагрузки. Так как амплитуда тока
превышает ток теплового расцепления автомата, длительная работа в данном режиме
не предусмотрена.
·
При
увеличении скорости изменения напряжения мы значительно уменьшаем время первого
согласования по скорости и время пусковых токов статора и ротора. Следовательно
мы можем уменьшить время наброса нагрузки с 1 до 0,6с. При этом значение
перерегулирования по скорости не превышает 20%, а величина пусковых токов не
превышает номинальные, что положительно сказывается на эксплуатационных
характеристиках двигателя.
Для
достижения минимального времени пуска нужно увеличивать скорость изменения
частоты и напряжения и уменьшить момент инерции. При этом необходимо следить за
пульсацией и амплитудами токов статора и ротора.
Список
литературы
1.
Методические
указания к курсовому проекту «Электропривод по схеме преобразователь частоты -
асинхронный двигатель»
2.
Конспект
лекций по курсу «Элементы и системы автоматизированного управления»
3.
Методические
указания к лабораторным работам по курсу «Элементы и системы
автоматизированного управления»