Автоматизация нефтеперекачивающей станции 'Субханкулово' нефтепровода НКК
СОДЕРЖАНИЕ
Определения,
обозначения и сокращения
Введение
.
Общие сведения о НПС «Субханкулово»
.1
Характеристика НПС «Субханкулово»
.2
Описание технологического процесса
.3
Анализ технологического процесса как объекта автоматизации
.
Патентная проработка
.1
Выбор и обоснование предмета поиска
.2
Регламент поиска
.3
Результаты поиска
.4
Анализ результатов поиска
.
Автоматизация нефтеперекачивающей станции
.1
Назначение и структура системы автоматизации
.2
Состав микропроцессорной системы автоматизации
.3
Функциональная схема автоматизации агрегата
.4
Анализ средств измерения уровня вибрации
.5
Обзор систем виброконтроля
.
Разработка программы управления МНА с применением алгоритмов защит по вибрации
и осевому сдвигу
.1
Программное обеспечение АРМ оператора
.3
Разработка программы управления МНА
.
Охрана труда и техника безопасности
.1
Анализ производственных опасностей
.2
Мероприятия по обеспечению безопасных и безвредных условий труда
.3
Расчет установки пенного тушения и пожарного водоснабжения
Оценка
экономической эффективности проекта внедрения системы виброконтроля
магистрального насосного агрегата
.1
Экономическая характеристика ОАО «Уралсибнефтепровод»
.2
Краткая характеристика объекта исследования
.3
Методика расчета экономической эффективности проекта
.4
Расчет экономической эффективности проекта
Заключение
Список
использованных источников
Приложение
А. Перечень демонстрационных листов
Приложение
Б. Листинг программы управления МНА
ОПРЕДЕЛЕНИЯ, ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
|
НПС
МДП ПЛК МНА ЛПДС ФГУ ССВД СОД САРД СТД КПД СВКА СГАЭС АВР ПАЗ СА МПСА ТП КЦ
АРМ УСО ТОУ ЗРУ УППС БРУ СЗУ ФНЧ ЦПУ
|
-
нефтеперекачивающая станция - местный диспетчерский пункт - программируемый
логический контроллер - магистральным насосным агрегатом - линейная
производственно-диспетчерская станция фильтр грязеуловитель - система
сглаживания волн давления - средства очистки и дренажа - система
автоматического регулирования давления - синхронный трехфазный двигатель -
коэффициент полезного действия - система виброконтроля автоматическая -
система газоаналитическая - автоматическое включения резерва -
противоаварийная защита - система автоматизации - микропроцессорная система
автоматизации - технологический процесс - контроллер центральный -
автоматизированное рабочее место - устройство связи с объектом -
технологический объект управления - защитное распределительное устройство -
узел приема-пуска систем очистки и диагностики - блок ручного управления -
согласующий зарядовый усилитель - фильтр нижних частот - центральные процессорные
устройства
|
ВВЕДЕНИЕ
Нефтеперекачивающая станция (НПС) представляет
собой сложный комплекс технологических объектов осуществляющих транспортировку
нефти.
Автоматическое управление НПС - это
функционирование объекта с автоматическим выбором такого технологического
режима, при котором обеспечивается наибольшая производительность с наименьшими
затратами энергетических ресурсов, экономия которых является актуальной
проблемой.
Система автоматизации НПС предназначена для
контроля, защиты и управления оборудованием НПС нефтепровода. Она должна
обеспечивать автономное поддержание заданного режима работы насосной станции и
его изменение по командам с пульта оператора НПС и из вышестоящего уровня
управления - местного диспетчерского пункта (МДП).
Целью данного дипломного проекта является
усовершенствование существующей системы автоматики НПС.
Задачами дипломного проекта являются:
изучение технологии перекачки нефти через
промежуточную НПС;
модернизация системы автоматики НПС на базе
современных программируемых логических контроллеров (ПЛК) серии DCS 2000;
выбор системы вибромониторинга соответствующей
современным требованиям защит по вибрации;
разработка программы управления магистральным
насосным агрегатом (МНА) с применением алгоритмов защит по вибрации и осевому
сдвигу.
При работе над проектом были использованы
материалы ЗАО «Эмикон» и ОАО АК «Транснефть» (Технологический регламент НПС
«Субханкулово»).
1. ОБЩИЕ СВЕДЕНИЯ О НПС «СУБХАНКУЛОВО»
.1 Характеристика НПС «Субханкулово»
Нефтеперекачивающая станция «Субханкулово»
является структурным подразделением филиалов ОАО Урало-Сибирские магистральные
нефтепроводы (УСМН) и представляет комплекс сооружений, установок и
оборудования, предназначенных для обеспечения транспорта нефти по
магистральному нефтепроводу Нижневартовск-Курган-Куйбышев (НКК). НПС введена в
эксплуатацию 17 октября 1976 г. [1].
Магистральный нефтепровод
Нижневартовск-Курган-Куйбышев является нефтепроводом западного направления в
системе трубопроводов АК «Транснефть». Его эксплуатация осуществляется
нефтепроводным предприятием ОАО «Уралсибнефтепровод»
Заданная производительность перекачки
нефтепровода НКК обеспечивается работой головной перекачивающей станции и
промежуточных станций. Технологический процесс перекачки нефти на промежуточной
НПС «Субханкулово» осуществляется по схеме «из насоса в насос». При этом
станция оснащена лишь основными магистральными насосами, поскольку необходимый
для их нормальной работы подпор создается предыдущей перекачивающей станцией.
При перекачке «из насоса в насос» резервуары на предыдущих станциях
отсутствуют, что предотвращает потери нефтепродукта от испарения [2]. Кроме
того, этот способ перекачки позволяет использовать подпор предыдущей станции и
избежать тем самым установки подпорных насосов. Однако при повреждении
какого-либо участка трубопровода или выхода из строя оборудования НПС,
транспорт нефти прекращается.
НПС «Субханкулово» в составе ЛПДС «Субханкулово»
является структурным подразделением ОАО «Уралсибнефтепровод», представляет
собой комплекс сооружений и устройств для приема и перекачки нефти по
магистральному нефтепроводу НКК на участке Нурлино-Самара, расположена на
1912-м километре трубопровода НКК и относится по назначению к
нефтеперекачивающей станции без ёмкости. НПС без ёмкости предназначены для
повышения давления в магистральном нефтепроводе при перекачке нефти.
В состав НПС «Субханкулово» входят:
насосная станция с магистральными насосными
агрегатами и системами смазки, охлаждения и откачки утечек;
фильтры-грязеуловители;
узел регулирования давления;
система сглаживания волн давления;
технологические трубопроводы;
операторная;
системы водоснабжения, теплоснабжения,
вентиляции, канализации, пожаротушения, электроснабжения, автоматики,
телемеханики, АСУ, связи, производственно - бытовые здания и сооружения.
.2 Описание технологического процесса
Технологическая схема НПС «Субханкулово»
приведена на рисунке 1.1.
Технологический процесс перекачки осуществляется
согласно утвержденным технологическим картам нефтепровода и технологическим режимам
перекачки.
Нефть поступает с НПС «Нурлино» на НПС
«Субханкулово».
Поток нефти, поступающий на станцию, попадает в
камеру приема-пропуска скребка. При закрытых задвижках 83, 87 перекачивающая
станция отключена от магистрали и поток нефти, пройдя задвижки 88, 89 и
обратный клапан, транзитом направляется в магистральный трубопровод. Задвижки
85, 88 служат для приема и пропуска скребков-очистителей. На приемной части НПС
установлены фильтры-грязеуловители ФГУ № 1, 2, 3, предотвращающие попадание
механических примесей в перекачивающие агрегаты. Для очистки фильтров
предусмотрены дренажная линия и задвижки. После фильтров-грязеуловителей поток
нефти направляется в общестанционный коллектор. На приеме и нагнетании насосов

Рисунок 1.1 - Технологическая схема НПС
«Субханкулово»
НМ 10000-210 № 1, 2, 3, 4 установлены задвижки
7-14, а параллельно насосам - обратные клапаны 1-4, так чтобы при остановке
насосов и перекрытии его задвижек поток нефти автоматически направлялся по обводному
трубопроводу (коллектору). Обратные клапаны предохраняют агрегаты от работы «на
себя».
Для предохранения приёмного коллектора
технологических трубопроводов НПС от чрезмерных давлений на приёме станции,
возникающих при внезапных отключениях НПС, на участке трубопровода между
фильтрами-грязеуловителями и магистральной насосной на байпасе предусмотрена
система сглаживания волн давления (ССВД). На НПС «Субханкулово» установлена
система типа «Аркрон» с клапанами в количестве шести штук. Устройство типа
«Аркрон» работает по следующему принципу: при резком нарастании давления на
приёме станции со скоростью более 0,3 МПа/с открываются клапаны устройства
«Аркрон» и происходит уменьшение скорости нарастания давления, что гарантирует
невозможность гидравлического удара. При постепенном нарастании давления (со
скоростью менее 0,1…0,2 МПа/с) «Аркрон» не срабатывает.
Для приема сбрасываемой нефти устройством
«Аркрон» на НПС используется резервуар особой конструкции Е-290.
После прохождения фильтров-грязеуловителей и
площадочных сооружений промежуточной НПС с системами сглаживания и сброса волн
давления нефть поступает в насосную на вход магистрального насосного агрегата.
Обычно на нефтеперекачивающей станции
устанавливается четыре насосных агрегата (МНА № 1 - МНА № 4), три из которых -
рабочие, один - резервный. Из-за небольших объёмов перекачки на НПС
«Субханкулово» одновременно работает только один насос, в редких случаях - два.
Каждый насос имеет свою производительность, поэтому оператор для поддержания
заданного режима перекачки включает в работу определённый насос.
На участке трубопровода от магистральной
насосной до магистрального нефтепровода установлен узел регулирования давления
для поддержания заданных величин давления:
минимальное давление на входе в магистральную
насосную - 0,7 МПа;
максимальное давление на выходе станции - 6 МПа.
Регулирование давления осуществляется методом
дросселирования потока.
В узле регулирования давления
установлены две регулирующие заслонки фирмы «BIFFI» c Ру=75 на суммарную производительность
Q=12500 м / час.
/ час.
Применение системы автоматического
регулирования давления обусловлено тем, что регулирование давления является
одной из важнейших функций, обеспечивающей нормальный режим работы нефтепровода.
Изменение условий перекачки в процессе эксплуатации (изменение расхода,
временный выход из строя какой-либо станции) может привести к нарушению
нормального режима работы: к кавитациям на одних станциях и к давлениям,
превышающим предельное, - на других. Это означает, что пропускные способности
отдельных участков нефтепровода окажутся неодинаковыми. Согласование работы
насосных станций достигается регулированием.
После узла регуляторов давления
нефть направляется в узел приема-пуска скребка и далее в магистральный
нефтепровод. Обвязка узла подключения позволяет вести перекачку нефти через НПС
и минуя НПС, пропускать средства очистки и дренажа (СОД) по нефтепроводу с
остановкой НПС и без остановки.
В целях уменьшения механического
напряжения в трубах и оборудовании, повышения их долговечности обеспечивается
наиболее длительная работа нефтепровода на заданном технологическом режиме,
избегая остановок одного или двух насосных агрегатов НПС, остановки перекачки
нефти по трубопроводу и полного сброса давления.
Помещение магистральных насосных
агрегатов предназначается для размещения основного технологического
оборудования и создания нормальных условий его работы.
Помещение разделяется
воздухонепроницаемой огнестойкой перегородкой на два отдельных зала с отдельными
входами и выходами. Насосный зал относится к взрывоопасным помещениям класса
В-1а. В насосном зале установлены: четыре магистральных насоса (три рабочих и
один в резерве) типа НМ; блок откачки утечек.
Центробежные нефтяные насосы типа
НМ, специально разработанные для нефтяной промышленности, предназначены для
транспортирования нефти и нефтепродуктов Насосом называется гидравлическая
машина, в которой подводимая извне энергия (механическая, электрическая)
преобразуется в энергию потока жидкости.
При последовательном соединении, при
одной и той же подаче напоры, создаваемые насосами, суммируются. Это позволяет
увеличить напор на выходе станции. Поскольку при последовательной работе все
насосы работают при одной подаче, развиваемое ими давление равномерно
распределяется между всеми насосами. Поэтому при изменении давления насосной
станции перераспределение напоров происходит равномерно между всеми насосами.
Для насосов с подачей от 500 м3/ч и выше соединяют последовательно три насоса
при одном резервном.
В зале электродвигателей с
нормальной средой для привода насосов установлены:
синхронные электродвигатели
нормального исполнения типа СТД 8000;
блок централизованной маслосистемы с
аккумулирующим баком
Синхронные электродвигатели имеют
большую мощность по сравнению с асинхронными. КПД синхронного двигателя
изменяется незначительно при нагрузках, близких к номинальной мощности
двигателя.
Магистральные насосные агрегаты и
электродвигатели соединяются между собой с помощью соединительной муфты и
устанавливаются на общих фундаментах с металлическими опорными рамами.
Соединение осуществляется через специальное отверстие в герметизирующей камере
фрамуги разделительной стенки. К этому отверстию в камере, в соответствии с
требованиями техники безопасности, по специальной системе вентиляции подается
чистый воздух для создания упругой пневмозащиты между помещениями насосов и
электродвигателей.
Компоновка оборудования и
технологическая обвязка в магистральной насосной и вне её, приняты из условия
обеспечения следующих требований, определенных расчетными параметрами насосов:
самотечное отведение утечек от
торцевых уплотнений насосов в подземный сборник нефти ЕП-40;
подача нефти погружными
насосами на всасывающую линию магистральных насосов из емкости ЕП-40;
подача под напором масла к
насосным агрегатам и самотечное отведение его в масляные баки, установленные в
специальном приемнике.
Для обеспечения нормальных условий
работы магистральных насосов и электродвигателей по действующим стандартам
предусмотрены следующие вспомогательные системы:
смазки и охлаждения подшипников;
сбора утечек от торцевых уплотнений;
средств контроля и защиты насосных
агрегатов.
Все системы имеют закрытое
исполнение, рабочие реагенты циркулируют в них по замкнутому кругу[3].
Система разгрузки торцовых
уплотнений насосов осуществляется путем отвода части перекачиваемой нефти после
лабиринтных уплотнений валов в приемный коллектор НПС или в отдельно стоящий
сборник нефти ударной волны и разгрузки. Отвод разгрузочной нефти от торцовых
уплотнений насосов в сборник нефти ударной волны и разгрузки по защитному
контуру производится при срабатывании предохранительного клапана лишь в
отдельных случаях, когда давление в приемном коллекторе НПС поднимается выше
допустимого по прочности торцов на 2,5 МПа.
Система сбора утечек
предусматривается для приема капельных утечек от торцовых уплотнений,
возникающих в процессе эксплуатации, а также на случай возникновения на насосах
аварийных ситуаций: образования щелей или полного раскрытия торцовых
уплотнений. Отвод утечек осуществляется в специальный сборник, размещаемый вне
помещения насосов. В этом сборнике должен постоянно сохраняться незаполненный
объем, достаточный для приема максимальных утечек, образующихся при раскрытии
торцовых уплотнений за время перекрытия задвижек на основных
трубопроводах-отводах неисправного насоса.
Централизованная система смазки и
охлаждения подшипников служит для подачи масла насосным агрегатам и отвода его
от них. Для этого от блока маслосистемы прокладываются распределительные трубопроводы,
к которым присоединяется отдельно установленный на высоте 3 м аккумулирующий
бак. Бак служит для снабжения подшипников в период выбега электродвигателей при
обесточивании станции. Масло перед подачей к подшипникам агрегатов должно
охлаждаться и иметь температуру на входе в маслоохладители не более 55 °С, а на
выходе 35 °С. Температура подогретого масла летом должна снижаться в
маслоохладителях на 10 °С.
.3 Анализ технологического процесса
как объекта автоматизации
Основной задачей автоматизации технологических
процессов перекачки нефти по магистральным трубопроводам является поддержание
необходимых технологических режимов, принятых на основании технологических
расчетов, а также экономичной и безаварийной работы нефтепроводов.
Система автоматизации предназначена
для контроля, защиты и управления оборудованием НПС. Она должна обеспечивать
автономное поддержание заданного режима работы и его изменение по командам с
пульта оператора-технолога из операторной и из вышестоящего уровня управления
по каналам телемеханики.
Система регулирования НПС призвана
обеспечить поддержание заданного давления при различных гидравлических
возмущениях, не допуская падения давления на линии всасывания станции ниже
некоторого минимального значения, а на линии нагнетания - не выше некоторой
максимальной уставки. Минимальное давление на линии всасывания станции зависит
от кавитационных характеристик насоса, а максимальное давление на линии
нагнетания определяется прочностью трубопровода.
Насосные станции магистральных
нефтепроводов оборудуются центробежными насосами. На цикле перекачки обычно
устанавливают четыре последовательно соединённых насосов, из которых один
резервный. Автоматизация насосной станции включает в себя управление основными
насосами в режимах запуска и остановки, автоматический контроль, защиту и
сигнализацию насосных агрегатов и в целом станции по контролируемым параметрам,
автоматическую остановку, контроль, защиту и сигнализацию по вспомогательным
установкам насосной станции, автоматическое регулирование режима работы и
защиты насосной станции. Система управления насосными агрегатами работает в
режимах дистанционного пооперационного управления, программной остановки
насосов и аварийной остановки.
Для насосных станций нефтепроводов
большое значение имеет схема запуска основных насосов. Имеются различные
программы запуска насосов в зависимости от характеристик насосов и схем
электроснабжения. Агрегаты, переведенные в положение резервных для системы
автоматического включения резерва (АВР), включаются также по программе. Таким
образом, система автоматизации НПС должна обеспечивать выполнение следующих
основных функций:
защита оборудования НПС и линейной
части (общестанционными и агрегатными защитами);
управление оборудованием НПС;
регулирование давление в магистральном нефтепроводе;
контроль технологических параметров
и параметров состояния оборудования;
отображение и регистрация
информации; связь с другими системами автоматизации.
Выбор и обоснование параметров
контроля, регулирования, противоаварийной защиты.
Основным способом контроля режима
магистрального нефтепровода является контроль давления в характерных точках
общей технологической схемы нефтепровода. Контроль выполняется во всех точках
технологической схемы, где возможно возникновение давлений, опасных для
магистрального нефтепровода и его оборудования.
На линии всасывания станции давление
должно поддерживаться в определённой зоне, как правило, достаточно малой.
Поскольку снижение давления на всасывании насосных агрегатов приводит к
кавитации, вызывающей повреждение агрегатов, требуется контроль давления на
всасывании.
Регулирование давления на выходе
станции необходимо для ограничения максимального давления, обусловленного
механической прочностью нефтепровода.
Для НПС, в которых применяется
автоматическое регулирование давлений способом дросселирования на выходе
станции, давление контролируется также перед исполнительным механизмом системы
дросселирования. Необходимость независимого контроля объясняется возможным
повышением давления, опасным для насосов, арматуры насосной при прикрытии
исполнительного механизма в процессе регулирования.
Перепад давления на регулирующем
органе равен разности давлений на входе и выходе из регулирующего органа. При
больших перепадах давления нефти в регулирующем органе из-за значительных
скоростей перекачиваемой жидкости могут возникнуть кавитационные условия, при
которых происходит сильный износ дроссельных поверхностей, а также сильный шум
и повышенная вибрация. А в случае недостаточной мощности привода при достижении
определённого перепада заслонка становится неуправляемой, её «заклинивает». В
таких случаях приходится искусственным путём понижать давление до заслонки,
чтобы обеспечить возврат к нормальной работе.
По приведённым выше обоснованиям
системой автоматики станции «Субханкулово» предусматривается измерение и
контроль технологических параметров:
давления на приёме НПС;
давления до регулирующих заслонок
НПС;
давления на выходе станции (после
регулирующих заслонок) НПС;
перепада давления на регулирующих
заслонках.
Для предупреждения аварийных
ситуаций, связанных с неисправностью магистральных насосных агрегатов,
необходимо предусматривать контроль параметров, отражающих нормальный режим
работы агрегата.
У агрегата непрерывно контролируется
ряд технологических параметров, аварийные значения которых требуют отключения и
блокировки его работы. В зависимости от параметра или условия, по которому
сработала защита, может выполняться:
отключение электродвигателя;
закрытие агрегатных задвижек;
отключение подпорной вентиляции;
пуск резервного агрегата.
Измеряемые параметры:
вибрация подшипников;
температура корпуса насоса;
температура холодного/горячего
воздуха в корпусе электродвигателя;
температура подшипников насоса и
электродвигателя;
сила тока электродвигателя;
активная/реактивная мощность;
давление масла в трубопроводе к МНА;
давление на входе/выходе МНА;
температура обмоток статора.
Существующие защиты и управляющие
воздействия.
Для обеспечения надежной и
безопасной эксплуатации основного и вспомогательного оборудования нефтеперекачивающие
станции имеют разветвленную систему средств контроля работы, сигнализации и
блокировки как отдельных перекачивающих агрегатов, так и станции в целом [4].
Общестанционные защиты и
сигнализации служат для аварийного отключения НПС в случае превышения
технологическими параметрами регламентированных, необходимых для нормального
хода технологического процесса. Общестанционная защита срабатывает
автоматически без участия оператора с выдержкой времени. При этом на экране
монитора в операторной НПС-6 и на местном диспетчерском пункте в Туймазинском
нефтепроводном управлении отображается узел, в котором произошла авария.
Защита при аварийной загазованности
в отделении насосов осуществляет отключение всех вспомогательных систем
насосной, за исключением вентиляционных установок. Это требуется для
предотвращения возможности взрыва в насосной. Отключение МНА производится по
программе, с закрытием задвижек на всасывании и нагнетании каждого агрегата.
Таким образом, при срабатывании этой защиты прекращается доступ нефти в
насосный зал.
Одновременно со срабатыванием защиты
при загазованности в отделении насосов автоматически включается световая и
звуковая сигнализация, для оповещения обслуживающего персонал о необходимости
покинуть помещение.
Защита при пожаре в отделении
насосов срабатывает так же, как и защита при загазованности, за исключением
того, что отключаются также и все вентиляционные установки. Одновременно со
срабатыванием защиты при пожаре включается система автоматического
пожаротушения, подающая пену в соответствующее помещение перекачивающей
насосной, и включаются световая и звуковая сигнализации в насосной.
Защита при затоплении отделения
насосов срабатывает при проливе в насосной больших количеств нефти и заполнении
ею всех каналов насосной. Хотя содержание нефтяных паров в воздухе насосной
часто намного меньше нижнего предела взрывоопасной концентрации, и
сигнализаторы загазованности не срабатывают. Но непосредственно над
поверхностью нефти имеется взрывоопасная концентрация, и при появлении искры
может произойти взрыв.
Защита при максимальном аварийном
уровне в резервуаре-сборнике утечек из насосных агрегатов осуществляет
отключение всех МНА перекачивающей насосной.
Отключение МНА требуется для
прекращения поступления нефти в резервуар-сборник утечек и предотвращения,
таким образом, попадания нефти из этого резервуара на территорию станции.
Защита при аварии вспомогательных
систем НПС, обеспечивающих циркуляцию смазочного масла и воды, а также подачу
воздуха в воздушные камеры электродвигателей, осуществляется отключением МНА.
Анализ существующей системы
автоматизации.
В 2002 году была проведена
реконструкция существующей системы релейной автоматики внедрением
микропроцесорной системы автоматизации (МПСА)
технологического оборудования НПС на
базе программируемых логических контроллеров (ПЛК) серии ЭК-2000 производства
ЗАО «ЭМИКОН».
Существующая система управления
нефтеперекачивающей станции «Субханкулово» выполняет следующие функции:
сбор информации о состоянии
технологического объекта;
управления;
поддержание технологических
параметров на заданных значениях-уставках;
контроль за технологическими
параметрами;
сигнализация о параметрах, значения
которых вышли за пределы, рассматриваемые как предельно допустимые;
блокировка управлений, являющихся
результатом ошибочных действий технологического персонала (запрет запуска
агрегата);
противоаварийная защита (ПАЗ)
процесса при возникновении аварийных ситуаций [5].
Для сбора информации, как правило,
используются датчики с унифицированным выходным токовым сигналом 4-20 мА.
Обработка сигналов однотипных датчиков (температуры, вибрации и т.д.)
производится специализированными комплексами: для датчиков вибрации СВКА-01;
для датчиков загазованности - СГАЭС-ТН. В данных комплексах поддерживаются
функции индикации и выработки дискретных сигналов по двум уставкам, что
используется для системы защиты и блокировки. Регулирование давления
осуществляется с помощью контроллера ЭС-8 с собственным алгоритмом
регулирования, разработанным фирмой «СИНКРОСС».
Существующая система автоматизации
обеспечивает оперативное управление производством в реальном времени по
технологическим параметрам и показателям с учетом технических ограничений, то
есть выполняет информационную функцию, регулирование и управление технологическим
процессом.
Рассмотреная система автоматизации
эксплуатируется более 10 лет. Однако новое время диктует новые требования к
средствам автоматизации и требует совместимости уже существующих контроллеров,
работающих на объектах, с различными нововведениями.
Необходимо введение более
совершенных модулей, дополнительных средств самодиагностики, позволяющей
контролировать работоспособность модулей во время работы, что позволит повысить
надежность контроллера и предотвращать фатальные неисправности СА.
Также, на сегодняшний день влияние
человека на управление процессом перекачки является определяющим. В перспективе
необходимо стремиться к минимизации этого фактора. В первую очередь, эта
необходимость вызвана тем, что человеку свойственно ошибаться. Во вторую −
время запаздывания в принятии решения человеком больше, чем у микропроцессорной
техники. Поэтому в целях экономии следует внедрять более прогрессивную технику.
2. ПАТЕНТНАЯ ПРОРАБОТКА
.1 Выбор и обоснование предмета поиска
В дипломном проекте рассматривается
автоматизация нефтеперекачивающей станции «Субханкулово» нефтепровода НКК.
Для обеспечения нормального режима работы и
своевременного обнаружения нарушений в работе МНА необходимы постоянный
контроль ряда параметров и выдача аварийных сигналов при их отклонении. Одними
из этих параметров являются уровень вибрации МНА и осевой сдвиг.
Существующая система виброконтроля МНА не
соответствует требованиям нормативно - технической документации ОАО
«Транснефть», поскольку не способна производить измерение осевого сдвига МНА с
последующей выдачей тревожных сообщений и включением агрегатных защит. В рамках
модернизации системы вибромониторинга МНА НПС «Субханкулово» была предложена
система непрерывного виброконтроля «Аргус-М» для построения стационарной системы
контроля технического состояния МНА по параметрам вибрации, поэтому при
проведении патентного поиска особое внимание было уделено поиску и анализу
устройств виброконтроля и способам измерения уровня вибрации и осевого сдвига.
2.2 Регламент поиска
Патентный поиск проводился с использованием
фондов УГНТУ по источникам патентной документации Российской Федерации. По
зарубежным фондам поиск не проводился по причине их отсутствия.
Глубина поиска составляет четыре года (2008-2011
гг). Поиск проводился по индексам международной патентной классификации (МПК):
G01М 7/02 - «Испытания на вибрацию»;
G01M 15/12- «Испытание машин и двигателей
мониторинг вибраций».
При этом использовались следующие источники
патентной информации:
полные описания к патентам Российской Федерации;
документы справочно-поискового аппарата;
Официальный бюллетень Российского агентства по
патентам и товарным знакам «Изобретения. Полезные модели».
.3 Результаты поиска
Результаты поиска приведены в таблице 2.1.
Таблица 2.1 - Результаты патентного поиска
|
Страна
|
Индекс
МПК
|
Номера
просмотренных патентов
|
Выявленные
аналоги
|
|
Россия
|
G01М
7/02 G01М 15/12
|
№№
2319129 -2437072 №№2319131 -2416788
|
№
2325625 «Устройство для контроля вибраций» № 2356021 «Способ вибрационной
диагностики роторных систем» № 2363936 «Способ вибродиагностики объектов» №
2363029 «Система вибрационного контроля» № 2393448 «Вибростенд испытательный
электрогидравлический» № 2396531 «Стенд для испытания изделий на совместное
воздействие вибрационных и линейных ускорений»
|
.4 Анализ результатов поиска
Рассмотрим более подробно аналоги, перечисленные
в таблице 2.1.
Устройство для контроля вибрации (патент №
2325625) содержит последовательно соединенные вибропреобразователь, полосовой
фильтр и масштабирующий усилитель, три пороговых элемента, два элемента И-НЕ,
схемы совпадений, задержки, блок питания, триггеры, блок предварительной
сигнализации, блок аварийной сигнализации, блок защиты. Дополнительно введены
задатчик уровней сигнализирующий, счетчик, индикатор времени.
Сущность предлагаемого устройства заключается в
определении прогнозируемого времени достижения вибрации уровня аварийной
ситуации на основе оценки динамики изменения текущих значений вибрации:
фиксируются моменты превышения уровня вибрации двух заданных значений, определяется
временной интервал, характеризующий скорость изменения амплитуды вибраций,
далее прогнозируется время достижения третьего заданного - аварийного - уровня
вибрации.
Способ вибрационной диагностики роторных систем
(патент № 2356021). Включает измерение параметров вибрационного процесса
работающего агрегата и сравнение получаемых параметров с этими же величинами,
замеренными в первоначальном состоянии, при этом характеристики вибрации
регистрируют в двух направлениях: вертикальном и горизонтальном по отношению к
оси вращения ротора. Полученные данные сохраняют в компьютере в оцифрованном
виде, при этом проводят анализ энергетического спектра, который заключается в
получении энергетического спектра функции виброскорости в окрестностях частоты
вращения ротора. А затем фильтрацию в вертикальном направлении, и по количеству
пиков в энергетическом спектре судят о появлении усталостной трещины и ее
глубины.
Способ вибродиагностики технического состояния
объекта (патент № 2363936) заключается в том, что в информативной точке
измеряют вибрацию диагностируемого объекта. Получают энергетический спектр
вибрации во временной области, оценивают амплитуды и частоты информативных
компонент энергетического спектра, соответствующих дефектам объекта,
линеаризуют шаг расположения информационных составляющих путем нелинейного
преобразования масштаба частот и определяют частоты существенных дефектов по
величине существенных компонентов энергетического спектра, по которым оценивают
состояние объекта.
Система вибрационного контроля (патент №
2363029) содержит измерительные блоки, аналоговые входы каждого из которых
соединены с выходами соответствующих датчиков, которые объединены в группу,
соответствующую узлу контролируемого агрегата, сетевой выход каждого из
измерительных блоков соединен с сетевой шиной, которая подключена к компьютеру
через сетевой адаптер. Выходы аварийных сигналов измерительных блоков соединены
с шиной сигналов защиты контролируемого агрегата. Каждый измерительный блок
содержит группы дополнительных аналоговых входов и выходов, которые соединены
соответственно с выходами и входами соседних измерительных блоков отличающаяся
тем, что с целью повышения надежности и достоверности функционирования, каждый
измерительный блок содержит группы дополнительных аналоговых входов и выходов,
которые соответственно соединены с выходами и входами соседних измерительных
блоков, а также содержит дополнительные логические входы и выходы, которые
соединены соответственно с логическими выходами и входами соседних
измерительных блоков, входы синхронизации измерительных блоков соединены с
выходами датчика синхронизации, а дополнительные выходы последовательного
интерфейса измерительных блоков подключены к дополнительной шине интерфейса,
которая соединена с дополнительным входом компьютера, выход которого является
дополнительным выходом сигнала защиты агрегата.
Вибростенд испытательный электрогидравлический
(патент № 2393448) включает исполнительный цилиндр со штоком, образующим две
гидравлические полости, и столом с датчиками смещения и ускорения, насосную
установку, гидравлический аккумулятор, блок управления блок измерений и линии
связей агрегатов и блоков гидравлических и электрических. Каждая из двух равных
по площади гидравлических полостей исполнительного цилиндра снабжена электрогидравлическим
сервоклапаном при минимальной длине соединительных каналов. Блок управления
содержит два выхода управляющих сигналов, сдвинутых по фазе на 180°, амплитуды
которых идентичны, а на линии подачи рабочей жидкости к сервоклапанам
установлен общий для двух сервоклапанов коллектор.
Стенд для испытания изделий на совместное
воздействие вибрационных и линейных ускорений (патент № 2396531) содержит
центрифугу, включающую электрический привод, ротор и устройство для передачи
вращения с вертикально расположенного вала привода на ротор, выполненное в виде
упругой муфты, состоящей из соединенных упругой связью ведущей и, по крайней
мере, одной ведомой полумуфты, а также диска, закрепленных на стержне,
установленном на валу электрического привода соосно ему, подвижные опоры для
закрепления объектов испытаний на роторе. Диск закреплен горизонтально на
стержне и снабжен штифтом, установленным вертикально на диске на заданном
расстоянии от оси вала. Ротор выполнен в виде направляющих, установленных
горизонтально симметрично относительно оси вала на силовом каркасе, жестко
закрепленном, по крайней мере, на одной ведомой полумуфте. Подвижные опоры
выполнены с возможностью продольного перемещения относительно направляющих и
снабжены сменными упругими подвесками, ограничивающими их перемещение
относительно направляющих. Вдоль направляющих размещены тяги, каждая из которых
одним концом шарнирно соединена с соответствующей подвижной опорой, а другим
концом шарнирно соединена со штифтом, при этом электрический привод выполнен с
возможностью одновременной подачи постоянной и переменной составляющих тока на
обмотку якоря электродвигателя постоянного тока. Технический результат
заключается в упрощении конструкции, возможности независимой регулировки
уровней вибрационных и линейных ускорений.
Патентные исследования показали, что на
сегодняшний день существует достаточно большое количество устройств контроля
вибрации различных моделей, отличающихся принципом действия, информативностью и
точностью получаемых данных, что свидетельствует о высокой востребованности
подобных устройств и развитии исследований в данном направлении.
Система контроля «Аргус-М», предложенная для
контроля уровня вибрации магистральных насосных агрегатов на НПС
«Субханкулово», имеет сравнительно простой и проверенный принцип действия, что
свидетельствует о надежности прибора, отличается удобством использования,
благодаря модульной структуре исполнения, и четкостью срабатывания по аварийным
значениям.
3. АВТОМАТИЗАЦИЯ НЕФТЕПЕРЕКАЧИВАЮЩЕЙ СТАНЦИИ
.1 Назначение и структура системы автоматизации
На НПС используется микропроцессорная система
автоматизации (МПСА), которая является реализацией программно-технического
комплекса автоматизаций нефтеперекачивающих станций магистральных
нефтепроводов, входящих в систему АК «Транснефть», построенная на базе
программируемых логических контроллеров технологического оборудования серии
DCS-2000 фирмы «Эмикон» [7].
Микропроцессорные системы автоматизации
нефтеперекачивающих станций предназначены для управления технологическим
оборудованием, а также для обеспечения различных защит при отклонении
параметров технологического процесса или режима работы технологического
оборудования от нормы.
СА НПС выполняет следующие функции:
анализ режимов технологического оборудования;
контроль технологических параметров, режимов
перекачки, готовности МНА к запуску;
обработка предельных значений параметров по
агрегату;
управление и контроль станционных и агрегатных
задвижек;
управление (программный и кнопочный пуск,
программное и кнопочное - отключение) и контроль МНА;
задание уставок регулирования;
регулирование давления на входе/выходе НПС;
управление вспомогательными системами;
управление и контроль агрегатов вспомогательных
систем и вспомогательных сооружений;
контроль исправности напряжения на вводах 6 кВ;
контроль и сигнализация пожара;
автоматическое пожаротушение;
обработка измерений и контроль достоверности
измеряемых параметров;
отображение информации и документирование,
формирование кадров отображения ТП, табличных форм представления информации,
форм печати оперативных сообщений, архивных данных, отчетных документов;
прием и передача сигналов в систему
телемеханики.
Структурная схема системы автоматизации НПС
приведена на рисунке 3.1.
СА имеет трехуровневую структуру:
Нижний уровень включает датчики и вторичные
преобразователи, а также показывающие приборы и органы управления,
устанавливаемые на приборных щитах и отдельно по месту.
Средний уровень обеспечивает сбор информации от
датчиков и вторичных преобразователей, ее передачу в центральный контроллер
верхнего уровня, а также получение выходной информации от центрального
контроллера и формирование управляющих воздействий на ИМ СА НПС.
Верхний уровень обеспечивает:
логическую обработку входной информации,
поступающей от среднего уровня, в соответствии с заданным алгоритмом
управления;
формирование управляющих команд для контроллеров
ввода/вывода;
мониторинг ТП на РС-совместимых станциях
оператора;
архивацию событий, поступающих с объекта и
действий оператора.
Верхний уровень МПСА включает в себя центральный
контроллер и автоматизированное рабочее место (АРМ) оператора. АРМ реализованы
на базе двух рабочих станций (РС) - IBM-совместимых персональных компьютерах.
Контроллеры и РС работают в локальной вычислительной сети.
Каждый из РС АРМ может работать независимо друг
от друга, для чего имеет в своем составе модуль сетевой для подключения к
полевой шине, связывающей контроллер центральный (КЦ) и РС. Каждый компьютер
подключается к собственной полевой шине. Тем самым обеспечивается резерв АРМ
оператора. К компьютеру РС2 АРМ оператора в МДП подключен принтер для
распечатки отчетов о работе станции.

Рисунок 3.1 - Структурная схема системы
автоматизации НПС
Средний уровень представлен контроллерами связи
с объектом (УСО).
УСО 1 реализует функции противоаварийных
автоматических общестанционных защит. На контроллер УСО 1, помимо функции связи
с ТОУ, возлагается задача автоматического перевода НПС в безопасное состояние
при потере работоспособности КЦ (основного и резервного). Перевод
осуществляется по алгоритму, записанному в процессорном модуле УСО 1. МНА
отключить, задвижки подключения НПС к МН закрыть, для НПС - включить блокировку
пуска (отключить работающие) насосы откачки утечек. УСО 1 расположен в шкафу
управления, включает в себя модули центрального процессора (основной и
резервный), модули ввода-вывода для подключения оборудования полевого уровня,
сетевые модули для подключения вторичных приборов систем контроля
загазованности, виброконтроля, по интерфейсу RS-485.
УСО 2 обеспечивают контроль и управление МНА
1…4, включает в себя модули центрального процессора (основной и резервный),
модули ввода-вывода, сетевые модули
УСО 3 обеспечивает контроль и управление
вспомогательными системами, а также управление общестанционными и агрегатными
задвижками. включает в себя модули центрального процессора (основной и
резервный), модули ввода-вывода, сетевые модули. Подключение «интеллектуальных»
задвижек по интерфейсу RS-485, протокол Modbus RTU выполняется посредством
контроллера связи или сетевых модулей контроллера.
УСО 4 располагается в шкафу управления
блок-бокса защитного распределительного устройства (ЗРУ) НПС. Включает в себя
модули центрального процессора (основной и резервный), модули ввода-вывода для
сбора информации об электрических параметрах (ток, напряжение, электрическая
мощность), контроля состояния высоковольтных выключателей ЗРУ и управления МНА.
УСО 5 располагается в шкафу управления
блок/бокса узла приема-пуска систем очистки и диагностики (УППС). В шкафу
управления размещаются модули центрального процессора (основной и резервный),
модули ввода-вывода для сбора информации о технологических параметрах на УППС,
контроля и управления задвижками УППС.
Для резервирования основных функций защит НПС -
тревожной сигнализации и защитных отключений, а также пожаротушения в состав СА
включен блок ручного управления (БРУ), предназначенный для предотвращения
аварии оборудования при выходе из строя средств микропроцессорной автоматики.
На БРУ предусматривается световая сигнализация от источников следующих
сигналов:
аварийного давления на приеме, в коллекторе и на
выходе НПС;
аварийной загазованности в насосном зале НПС, в
маслоприямке НПС и в блок/боксе регулирования давления;
затопления насосного зала НПС;
аварийного уровня в сборниках утечек НПС;
включенного состояния магистральных насосных
агрегатов.
На БРУ НПС расположены кнопки подачи
непосредственно на исполнительные устройства (магнитные пускатели агрегатов или
соленоиды масляных выключателей) с выдачей сигналов о подаче команд в
микропроцессорную систему автоматизации следующих команд управления:
аварийного отключения НПС;
аварийного остановки магистральных насосных
агрегатов.
Нижний уровень МПСА включает в себя датчики и
вторичные преобразователи, обеспечивающие формирование входных электрических
аналоговых и дискретных сигналов СА НПС и показывающие приборы, устанавливаемые
по месту на приборных стойках или непосредственно на технологическом
оборудовании, а также органы управления, входящие технологических объектов
управления.
Для сбора информации, как правило, используются
датчики с унифицированным выходным токовым сигналом 4-20 мА.
Аналоговые и дискретные входные сигналы
поступают на соответствующие модули ввода контроллеров УСО, а выходные сигналы
с модулей вывода контроллеров - на органы управления.
Все приборы и аппараты, расположенные во
взрывоопасных зонах классов 0, 1 и 2 в соответствии с правилами устройства
электроустановок, включены в искробезопасную электрическую цепь или имеют вид
взрывозащиты - взрывонепроницаемая оболочка (Exd).
Работа системы автоматики происходит следующим
образом. Первичная информация о технологических параметрах, параметрах
состояния оборудования и окружающей среды помещений НПС, формируемая с помощью
аналоговых измерительных приборов и сигнализирующих приборов релейного типа
поступает на модули программируемых логических контроллеров УСО. Токовые или
потенциальные сигналы преобразуются в цифровой код для обработки в процессоре
контроллера.
Программное обеспечение КЦ и контроллеров УСО
выполнено на языке программирования «CONT» с использованием интегрированной
среды разработки ПО «CONT-Designer». ПО реализует алгоритмы:
обработки первичной информации;
управления и контроля МНА и вспомогательных
систем;
контроля технологических параметров и защиты
НПС;
подготовки и передачи информации о состоянии
технологических объектов управления на верхний уровень (рабочие станции
оператора и в МДП);
обработки команд управления с верхнего уровня;
обмена информацией с РДП и связи с линейной
телемеханикой.
.2 Состав микропроцессорной системы
автоматизации
В рамках модернизации системы автоматизации
предлагается центральный контроллер и контроллеры УСО выполнить на базе модулей
серии DCS-2000C с модулем центрального процессорного устройства CPU-32A.
В связи с тем, что в настоящее время средствами
коммуникации в системах все больше и больше используются интерфейсные каналы
типа ETHERNET, современный модуль ЦПУ должен иметь несколько интерфейсных
каналов ETHERNET для обеспечения основной и резервной линий передач, а также
для подключения резервного модуля ЦПУ.
Модуль предназначен для работы в составе
распределенных систем управления на базе программируемых контроллеров серии
DCS-2000 для сбора информации, обработки ее по заданным алгоритмам и выдачи
управляющих команд по пяти последовательным каналам RS-485 с гальванической
изоляцией и цепями грозозащиты, одному последовательному неизолированным каналу
RS-232 и от одного до пяти каналов Ethernet. Модуль является восстанавливаемым
и ремонтно-пригодным изделием, предназначенным для круглосуточной непрерывной
эксплуатации.
Основные технические характеристики модуля
приведены в таблице 3.1
Таблица 3.1 - Основные технические
характеристики модуля CPU-32A
|
Характеристика
|
Величина
|
Примечание
|
|
Тип
процессора
|
SC-143
IEC
|
BECK
|
|
Тактовая
частота процессора, МГц
|
96
|
|
|
Объем
памяти программ. Мбайт
|
8
|
Внутренняя
FLASH
|
|
Объем
памяти данных. Мбайт
|
8
|
Внутреннее
ОЗУ
|
|
Количество
каналов низкоскоростных последовательных интерфейсов RS232
|
1
|
Скорость
до 460800 бит/с, ASYNC
|
|
Количество
каналов низкоскоростных последовательных интерфейсов RS485
|
1
|
Скорость
до 460800 бит/с, ASYNC, с гальванической изоляцией (1000В) и цепями
грозозащиты
|
|
Количество
каналов высокоскоростных последовательных интерфейсов RS485
|
4
|
Скорость
до 2,304 Мбит/с, ASYNC, SDLC, с гальванической изоляцией (1000В) и цепями
грозозащиты
|
|
Количество
каналов Ethernet
|
3
|
10/100 Base ТХ
half/full duplex operation
|
|
Устройство
резервирования
|
|
Есть
|
|
Индикация
|
|
Светодиодная
и жидкокристаллическая панель (две строки по восемь символов)
|
|
Количество
каналов USB-А
|
1
|
|
Конструкция модуля отвечает требованиям,
предъявляемым к конструкции модулей серии DCS-2000 устанавливаемых в каркас.
Модификация CPU-32A содержит три платы: плату CPU-32A, являющуюся платформой
модуля, плату дисплея DP-31А и плату сетевого модуля Ethernet С-32А. На плате
С-32А размещены два канала Ethernet. Печатные платы, соединенные между собой,
помещается в металлический корпус [8].
На рисунке 3.2 показана структурная схема
модуля, которая содержит:
микропроцессор, МП;
супервизор питания, СП;
последовательные многофункциональные
контроллеры, ПМК1 и ПМК2;
формирователи интерфейсных каналов RS-485,
ФКК8485;
формирователь интерфейсного канала RS-232,
ФКК8232;
формирователь интерфейсного канала USB, ФК USB;
схему резервирования, СР, формирователь сигнала
Inhibit;
схема ввода-вывода дискретных сигналов, ВВД;
часы реального времени, ЧРВ;
энергонезависимая память, EEPROM;
модуль дисплейный, DP-31;
сетевой модуль, С-32А;
формирователи интерфейсных каналов ETHERNET,
Е1.. .ЕЗ.
Модуль выполнен на базе микропроцессора типа
SC143 фирмы BECK. МП состоит из ядра, совместимого с микропроцессором 180186,
памяти и периферийных устройств. Память МП делится на память программ объемом
восемь Мбайт и память данных объемом восемь Мбайт. Устройствами периферийными
являются: последовательные интерфейсы, порты ввода-вывода и два встроенных
контроллера ETHERNET. Кроме того МП имеет раздельную двадцати четырех разрядную
шину адреса и шестнадцати разрядную шину данных.
Аппаратно-программные средства МП позволяют
взаимодействовать с устройствами модуля, как с устройствами ввода-вывода и как
с устройствами памяти. Устройствами ввода вывода являются ПМК1, ПМК2, модуль
дисплейный DP-31 и СР. Для выборки устройств ввода-вывода используются сигналы,
формируемые МП.
Адресное пространство памяти распространяется на
двухпортовую память модуля С-32А. Двухпортовая память модуля С-32А является
интерфейсом между

Рисунок 3.2 - Структурная схема модуля CPU-32A
МП и микропроцессором модуля С-32А. Обращение к
памяти формируется двумя сигналами UCSOUT и FLSEL. Совпадение двух логических
нулей на выходах UCSOUT и FLSEL характеризует обращение к памяти.
Для организации надежного запуска МП
используется устройство супервизора питания, которое выполнено на базе
микросхемы ADM706. СП в своем составе содержит охранный таймер и устройство
контроля питания. СП формирует сигнал сброса в двух случаях, когда включается
электропитание модуля и при сбое программы. Период формирования сигнала не
должен превышать 1,6 с.
Модуль содержит пять интерфейсных каналов типа
RS-485. Из них два канала Line 0 и Line l, скоростные, предназначены для
информационного обмена с модулями, установленными в каркас. Два канала Line 2 и
Line 3 предназначены для работы с другими уровнями системы или периферийным
оборудованием. Каналы Line 0, Line 1, Line 2, Line 3 могут производить обмен по
двум протоколам HDLC и MODBUS.
Формирователи изолированных каналов RS-485 со
светодиодной индикацией реализованы по типовой схеме, где в качестве
формирователей RS-485 использованы специализированные микросхемы ADM2582 с
внутренней гальванической развязкой. В качестве элементов грозозащиты
используются трансилы и позисторы.
Последовательный интерфейс USB является
встроенным устройством МП. Устройства, подключенные к USB интерфейсу, могут
питаться от источника питания модуля. Тип соединителя интерфейса USB - А.
Для формирования сигнала «горячий-холодный
запуск» служат специальные RC элементы и инвертор с триггером Шмидта. Номиналы
подобраны таким образом, что при пропадании электропитания более чем на 2,5 с
(с последующим восстановлением) на линии C/W появится высокий уровень на время
не более 0,5 с. Это событие информирует программное обеспечение о необходимости
«холодного» запуска с полной инициализацией системы.
Если электропитание пропадало на меньшее время
(или не пропадало вовсе, а сброс произошел из-за сбоя), то на линии C/W
находится постоянно низкий уровень, что говорит о необходимости “горячего”
запуска алгоритма с заданной точки с частичной инициализацией.
Если контроллер содержит два модуля CPU-32A,
один из них работает в режиме основного, а второй - в режиме резервного, то
арбитром выбора режимов этих модулей является схема резервирования. СР состоит
из формирователя сигнала Inhibit и приемника внешних сигналов исправности
основного модуля CPU. Формирователь сигнала Inhibit представляет собой счетчик,
который с периодом не более 500 мс сбрасывается. Если счетчик в течение 500 мс
не сбросится, сбой программного обеспечения или иная неисправность модуля, то
на выходе INHO+ пропадет напряжение питающие входную цепь схемы резервирования
резервного модуля и основной модуль перейдет в резерв, а резервный станет
основным.
ВВД состоит из двух оптопар. Одна оптопара
предназначена для дискретного выхода, источником которого является выходы
микропроцессора PI007 и PI029. Выход PI007 разрешает работу выхода PI029. Это
сделано для того, чтобы во время инициализации модуля не произошло ложное
срабатывание дискретного выхода. Если оба сигнала PI007 и PI029 будут
находиться в одном состоянии «0» или «1», то дискретный выход будет запрещен,
т.е. POUT- будет обесточен. В случае, если модуль будет находиться в состоянии
резервного, то дискретный выход так же обесточен.
ЧРВ выполненные на базе микросхемы RTS8564
позволяют осуществить привязку выполнения прикладной программы к входу
астрономического времени. ЧРВ содержат в своем составе регистры секунд, минут,
часов, дней недели, дней месяца, месяцев и года. Энергонезависимость ЧРВ
обеспечивается за счет автоматического перехода на питание от литиевой батареи
под управлением микросхемы DS1314S-2. Кроме того, эта микросхема выполняет
функцию мониторинга состояния литиевой батареи. Один раз в 24 часа на 1 секунду
производится подключение внутреннего резистора 1,2 МОм, на котором
контролируется падение напряжения.
Энергонезависимая память EEPROM, предназначенная
для хранения долговременных уставок, выполнена на базе микросхемы АТ24С1024.
фирмы ATMEL. Объем EEPROM составляет 1 Мбит. Информационный обмен МП с EEPROM
осуществляется по интерфейсу PC.
Модуль DP-31, предназначенный для индикации
состояния работы модуля, содержит индикатор типа ВС0802В. Индикатор имеет две
строки по восемь символов.
Устройство высокоскоростного обмена по каналам
Ethernet состоит из одного встроенного канала в плату CPU-32A, и четырех
каналов выполненных посредством мезонинных плат С-32А и CIM-32A. При этом
модуль С-32А имеет собственный микропроцессор, который производит
предварительную обработку данных поступающих через соединители на собственной
плате и на пассивной плате CIM-32A, разгружая тем самым основной микропроцессор
платы CPU-32A.
Архитектура систем автоматизации предусматривает
резервирование основных, наиболее уязвимых устройств, которые могут привести к
отказу. Это каналы межмодульных интерфейсов, источники питания и модули ЦПУ.
Использование модулей CPU-32А серии DCS-2000C обеспечивает опрос модулей УСО по
двум независимым интерфейсным каналам, основному, резервному. Резервирование
модулей ЦПУ связано с двумя основными вопросами: формирование сигналов,
обеспечивающих переключение с «ведущего» модуля ЦПУ на резервный и выравнивание
памяти в резервном модуле. В модулях ЦПУ фирмы «ЭМИКОН» выбран классический
метод переключения модулей, который заключается в том, что, если в основном
модуле перестает перезапускаться специальный таймер, то через 250 мс
формируется сигнал, останавливающий работу основного модуля и разрешающий
работу резервного. Для обеспечения мягкого перехода с основного модуля на резервный,
необходимо чтобы в резервном модуле находилось состояние входных, выходных
каналов модулей УСО, идентичное состоянию, находящемуся в основном модуле. С
целью выравнивания памяти модули CPU-32А содержат отдельный интерфейсный канал
типа ETНERNET, который отсутствует в модулях ЦПУ других серий.
Вопрос резервирования питания в контроллерах,
построенных на базе модулей DCS-2000C, решается путем подведения питания к
кроссовой плате каркаса через модули адаптера RP-31 или RP-32, которые снабжены
отдельными соединителями для подключения основного и резервного источников
питания. В этом случае нет необходимости создавать устройства для
резервирования питания.
Сетевой интерфейсный модуль CI-31A.
Современная микроэлектроника серьезным образом
повлияла на развитие устройств нижнего уровня систем автоматизации. Если еще
несколько лет назад датчики были аналоговые и дискретные, то сейчас на рынке
появилось большое количество интеллектуальных датчиков и устройств, имеющих в
своем составе микроконтроллер, преобразующий входную физическую величину в
цифровую форму представления. Как правило, интеллектуальные датчики имеют
достаточно распространенный последовательный интерфейс RS-485. Одним из
наиболее распространённых протоколов интеллектуальных устройств является MODBUS
RTU. Для подключения интеллектуальных устройств был разработан сетевой
интерфейсный модуль CI-32A, содержащий десять последовательных интерфейсных
каналов RS-485. По двум каналам модуль опрашивается модулем ЦПУ (в данном
случае модуль работает в режиме SLAVE), а по восьми другим каналам модуль
опрашивает интеллектуальные устройства (каждый из восьми каналов может работать
в режиме MASTER или SLAVE) [9].
Технические характеристики модуля CI-31A
приведены в таблице 3.2.
Таблица 3.2 - Технические характеристики модуля
CI-31A
|
Наименование
параметра
|
Значение
параметра
|
|
Тип
интерфейсов
|
RS-485
|
|
Количество
интерфейсных каналов RS-485
|
10
|
|
Максимальная
скорость передачи данных
|
921,6
Кбит/с
|
|
Протокол
обмена
|
MODBUSRTU
|
|
Ток
потребления, мА
|
|
Гальваническая
изоляция между внешним системным источником питания и питанием модуля, В, не
менее
|
1000
|
Модуль, входящий в состав контроллера
обеспечивает информационную связь центрального процессорного устройства (CPU)
контроллера с датчиками и исполнительными устройствами, имеющими интерфейсные
каналы RS-485 работающие по протоколу MODBUS RTU. Относительно CPU модуль
является подчиненным устройством и связывается с ним по двум системным
интерфейсным каналам RS-485. Относительно датчиков и исполнительных устройств модуль
работает в качестве «ведущего». Структурная схема модуля, показанная на рисунке
3.3, содержит следующие функциональные узлы:
микроконтроллер, МК;
тактовый генератор, ТГ;
задатчик скорости, МП;
супервизор питания, СП;
оперативное запоминающее устройство, ОЗУ;
универсальный асинхронный приемопередатчик,
УАПП;
формирователи интерфейсов RS-485, ФИ1.. .ФИ10;
формирователь питания, ФП.
Основным компонентом модуля является МК,
выполненный на базе микроконтроллера типа ATmega64, который содержит 53
программируемых линий ввода- вывода, оперативное запоминающее устройство
объемом 4 кбайта, два асинхронных последовательных интерфейса.
Последовательные интерфейсы МК используются для
формирования системных каналов связи, с помощью которых модуль производит
информационный обмен с модулем CPU.
Сетевая адресация (имеются в виду системные
каналы) определяется местом установки модуля в каркас и номером каркаса. В
единой сети может находиться до 8 каркасов.
СП в модуле выполняет две функции: первая
функция - формирование сигнала сброса устройств модуля при включении питания и
вторая функция сторожевого таймера - формирование сигнала сброса при
программном сбое, отсутствие сигнала WDI.

Рисунок 3.3 - Структурная схема модуля CI-31A
МК в модуле работает в режиме микропроцессора.
Это означает, что 16 линий ввода - вывода исполняют роль мультиплексированной
шины адреса, 16 разрядов, и шины данных, 8 разрядов. Сигналами синхронизации
шины являются сигнал чтения данных микроконтроллером, RD; сигнал записи данных
во внешние устройства (ОЗУ, УАПП), WR.
Режим работы МК с формированием шин адреса,
данных необходим для управления работой УАПП и ОЗУ. При этом сигналом обращения
к УАПП является адресный разряд А15 в состоянии логического нуля, а сигналом
выборки ОЗУ - А15 в состоянии логической единицы.
Внешнее ОЗУ, выполненное на базе микросхемы
K6X0808C1D-BF55 объемом 32 кбайт, предназначено для хранения заявок исполняемых
модулем, 16 кбайт и временного хранения данных считываемых из датчиков, 16
кбайт.
УАПП, выполненный на базе микросхемы XR16L788CQ
фирмы содержит восемь независимых интерфейсных каналов предназначенные для
подключения к модулю датчиков и исполнительных устройств.
Упрощенный алгоритм работы модуля можно
представить следующим образом. После включения питания контроллера, CPU
специальными командами настраивает работу интерфейсных каналов, к которым
подключены датчики и исполнительные устройства. Затем CPU передает в модуль
заявки и команду «Старт». Модуль, в свою очередь, получив команду старт,
производит циклическое выполнение заявок, т.е. опрос датчиков или запись
необходимых данных в исполнительные устройства. CPU, формируя запрос к модулю,
считывает его состояние и данные.
Необходимо учитывать то, чтобы к одному каналу
должны быть подключены идентичные устройства, имеющие одинаковые скорости
обмена, одинаковое количество стоповых битов и одинаковый паритет.
Формирователи физических уровней сигналов
интерфейса RS-485 (ФИ1...ФИ10) выполнены на базе микросхем ADM2582.
Особенностью данных микросхем является содержание внутри корпуса твердотельного
трансформатора, который обеспечивает гальваническую изоляцию системной части
модуля от интерфейсной.
Интерфейсные каналы RS-485 имеют терминальные
резисторы, предназначенные для согласования линий связи, подключаемых к модулю.
Номиналы резисторов 100 Ом. При отсутствии передачи данных по сети микросхемы
ADM2582 настроены на прием. Во время включения передатчика микросхемы переходят
из пассивного состояния в активное, что приводит к возникновению переходных
процессов в сети. Для устранения подобных явлений модуль содержит резисторы,
которые подсоединяют линии RSA1 и RSA2 системных интерфейсных каналов к
положительному выходу интерфейсного источника питания, линии RSB1 и RSB2 к
отрицательному.
В качестве ФП в модуле используется
стабилизирующий DC-DC преобразователь, который преобразует входное напряжение
находящееся в диапазоне от 18 до 36 В в напряжение питания компонентов модуля 5
В. Выходная часть DC-DC преобразователя гальванически изолирована от входной.
Напряжение пробоя не менее 1000 В.
Модули ввода-вывода серии DCS 2000.
Модули предназначены для использования в составе
распределенных систем управления и обеспечивают восприятие и обработку
измерительной информации, представленной сигналами силы постоянного тока,
термопреобразователей сопротивления различных градуировок, восприятие и
обработку дискретных сигналов, выработку управляющих воздействий в виде
выходных дискретных сигналов, информационный обмен по сети RS-485 (протокол
MODBUS RTU), индикацию режимов работы и состояния дискретных входов и выходов,
обмена данными по сети RS-485. Модули имеют два информационных канала,
предназначенных для обмена по сети RS-485. Организация каналов ввода - вывода
показана на рисунке 3.4.
Модули предназначены для работы в составе
распределенных систем управления. Все устройства системы объединены локальной
информационной сетью, работающей по протоколу MODBUS (интерфейс RS-485,
скорость передачи данных до 230400 бод), и имеют свой логический адрес. Модуль
принадлежит к устройствам нижнего уровня. В составе сети он работает в качестве
«подчиненного» устройства, исполняя команды «ведущего» устройства,
процессорного модуля или CPU-31А. Модули имеют два независимых или
коммутируемых информационных канала для подключения локальной сети [10].
По архитектуре модули серии DCS-2000, вне
зависимости от конструктивного исполнения, одинаковы. Модули имеют две основные
части - системную и объектную. Системная часть содержит микроконтроллер,
интерфейсные каналы, обеспечивающие связь модулей УСО с ЦПУ, средства адресации
модуля в информационной сети и задания скорости передачи по интерфейсным
каналам. Объектная часть содержит регистры ввода/вывода, ключи, входные фильтры
для модулей дискретного ввода/вывода и аналого-цифровые, цифро-аналоговые
преобразователи для модулей аналогового ввода/вывода. Существенным отличием
является то, что модули серии DCS-2000, устанавливаемые на DIN-рельс, имеют
модификации взрывозащищенного исполнения с маркировкой взрывозащиты [Exib]IIC X
и искробезопасными цепями могут быть связаны с датчиками, расположенными во
взрывоопасных зонах классов В-1а и В-1г.
Модуль AI-11 имеет четыре дифференциальных
канала для подключения к нему по трехпроводной схеме термометров сопротивления
типа ТСМ-50, ТСП-50 или ТСМ-100, ТСП-100. Модуль преобразует сигналы,
полученные с датчиков, в 12-разрядный цифровой код, доступный для считывания по
сети RS-485.
Основные технические характеристики модуля
приведены в таблице 3.3.
Таблица 3.3 - Технические характеристики модуля
AI-11
|
Наименование
параметра
|
Значение
параметра
|
|
Количество
каналов ввода
|
4
|
|
Диапазон
измеряемого сопротивления, Ом
|
40-90
(80 - 180)
|
|
Время
коммутации канала мкс, не более
|
1000
|
|
Время
преобразования мкс, не более
|
180
|
|
Разрядность
аналого-цифрового преобразования, бит
|
12
|
|
Основная
погрешность преобразования, %, не более
|
0,3
|
|
Дополнительная
температурная погрешность, % °С
|
0,01
|
Модуль состоит из двух основных устройств:
устройства аналогового, УА;
устройства управления, УУ.
УА предназначено для фильтрации входных сигналов
от термометров и преобразования этих сигналов в напряжение от 0 до 4 В. УА
также ограничивает ток во входных цепях модуля до искробезопасных значений.
УУ обеспечивает преобразование сигналов,
формируемых УА, в 12-ти разрядный цифровой код и работу модуля в локальной
сети.

Рисунок 3.4 - Организация каналов ввода - вывода
Структурная схема модуля, показанная на рисунке
3.5, содержит следующие функциональные узлы:
схему защиты входов аналогового коммутатора, СЗ;
входной коммутатор, ВК;
источники тока, ИТ1, ИТ2;
входной дифференциальный измерительный
усилитель, ИУ;
вторичные источники питания, ИП1.ИП3;
вторичный источник опорного напряжения, ВИОН;
микропроцессор, ЦПУ;
оптопары, ОП;
формирователь интерфейсов RS-485, ФИ.
УА содержит СЗ, ВК, ИТ1, ИТ2, ИУ, ИП1, ВИОН.
УУ содержит ЦПУ, ОП, ФИ, ИП2, ИП3.

Рисунок 3.5 - Структурная схема модуля AI-11
Принцип работы модуля состоит в следующем. ИТ1 и
ИТ2 формируют токи, равные 2 или 4 мА. Если перемычки установлены, то токи
равны 4 мА, что соответствует переходу на шкалу измерений сопротивления 40…90
Ом.
Если перемычки отсутствуют, то токи равны 2 мА,
что соответствует переходу на шкалу измерений сопротивления 80…180 Ом.
Входной сигнал через схему защиты СЗ поступает
на входной коммутатор ВК. Далее этот сигнал подается на вход дифференциального
измерительного усилителя ИУ, выполненного на приборе типа AD620.
При использовании модуля в условиях высокого
уровня помех, наводящихся на входные цепи, с помощью установки перемычки J1 к
входам ИУ подключается дополнительный конденсатор, позволяющий увеличить время
фильтрации входных сигналов.
С выхода измерительного усилителя сигнал
поступает на вход аналого-цифрового преобразователя в составе ЦПУ. АЦП имеет
восемь независимых входов. Один вход, ADC0, соединен с ВУ, а два других входа,
ADC1, ADC2, задействованы под тестовые сигналы, вырабатываемые опорным
источником ВИОН. Программный опрос этих входов позволяет проверить
работоспособность модуля в целом.
Управление выборкой входного канала производят
сигналы А0, А1, которые формируются на выходе параллельного порта
микропроцессора.
Основой центрального процессорного устройства
(ЦПУ) является однокристальный микроконтроллер ATmega853.
Наряду с микроконтроллером в состав ЦПУ входит
устройство охранного таймера Watchdog, выполненное на базе ИМС ADM705. Если в
течение 1,6 с не происходит программной поддержки охранного таймера, происходит
аппаратный сброс ЦПУ.
После получения данных об измерениях
производится их программная фильтрация; отфильтрованные значения записываются в
определенные регистры ОЗУ, доступные для чтения «ведущим» устройством по сети
RS-485. Установленные значения (постоянные фильтрации) для каждого канала
хранятся в энергонезависимой памяти.
Если по сети RS-485 приходит запрос на чтение
рабочих регистров от «ведущего» устройства, то он, проходя через формирователь
интерфейса RS-485 (ФИ), попадает на вход устройства USART микроконтроллера. По
этому факту формируется прерывание, происходит подготовка и передача ответа.
Формирователи интерфейса RS-485 построены на
базе ИМС MAX3088, имеющих улучшенные характеристики по скорости и нагрузочной
способности, и предназначены для управления обменом данными по сети RS-485.
Переключение модуля на передачу данных осуществляется по сигналам RTS 1 и RTS 2
ЦПУ.
Вторичные источники питания гальванически
изолируют питание модуля от системного источника питания. ИП 1, преобразуя
входное напряжение в напряжение ±12 В, обеспечивает питание аналоговой части
модуля. ИП2, преобразуя входное напряжение в напряжение +5В, обеспечивает
питание цифровых микросхем УУ. ИП3, преобразуя входное напряжение в напряжение
+5В, обеспечивает питание буферных преобразователей интерфейса RS-485. ФИ,
выполненный на базе микросхемы AD485 (MAX3085), с помощью ОП и ИП3
гальванически изолирован от других устройств модуля.
Модуль ввода аналоговых сигналов AI-12 имеет
четыре дифференциальных канала для подключения датчиков с выходным сигналом
силы постоянного тока или напряжения. Модуль преобразует сигналы, полученные с
датчиков, в 12-разрядный цифровой код, доступный для считывания по сети RS-485.
В части модификаций модуля предусмотрена возможность питания датчиков тока от
встроенных источников питания.
Основные технические характеристики модуля
приведены в таблице 3.4.
Таблица 3.4 - Технические характеристики модуля
AI-12
|
Наименование
параметра
|
Значение
параметра
|
|
Количество
каналов ввода
|
4
|
|
Входное
сопротивление каналов, Ом
|
50
|
|
Напряжение
питания измерительных каналов, В
|
24,5
± 2%
|
|
Внутреннее
сопротивление источника питания, Ом
|
440
|
|
Диапазон
входных токовых сигналов, мА
|
0...5;
0...20; 4...20
|
|
Диапазон
измеряемого напряжения , В
|
0...10
|
|
Время
коммутации канала, мкс, не более
|
50
|
|
Время
преобразования, мкс, не более
|
10
|
|
Минимальное
время полного обновления массива входов2, мс
|
360
|
|
Разрядность
аналого-цифрового преобразования, бит
|
12
|
|
Постоянная
времени аппаратного фильтра, мс
|
40
|
|
Постоянная
фильтрации программного фильтра
|
36;
40; 48; 64
|
|
Основная
погрешность преобразования , %, не более
|
0,3
или 0,2
|
|
Дополнительная
температурная погрешность, %/°С
|
0,01
|
Модуль состоит из двух основных устройств:
устройства аналогового, УА;
устройства управления, УУ.
УА предназначено для фильтрации входных токовых
сигналов, преобразования этих сигналов в потенциальные и их усиления. Кроме
этого, некоторые модификации модуля обеспечивают питание токовых датчиков от
встроенных в модуль преобразователей напряжением 24В. УА также ограничивает ток
во входных цепях модуля до искробезопасных значений. УУ обеспечивает
преобразование аналогового сигнала, формируемого УА, в 12-разрядный цифровой
код, передачу этого кода в процессорную часть модуля по протоколу SPI, работу
модуля в локальной сети, индикацию состояния модуля, а также некоторые
служебные функции.
Структурная схема модуля, показанная на рисунке
3.6, содержит следующие функциональные узлы:
схему фильтрации входных сигналов и защиты
входов аналогового коммутатора, СФЗ;
входной коммутатор, ВК;
входной дифференциальный измерительный
усилитель, ИУ;
развязывающие преобразователи напряжения,
ПН1…ПН4;
изолирующие преобразователи напряжения, ИП1…ИП3;
вторичный источник опорного напряжения, ВИОН;
аналогово-цифровой преобразователь, АЦП;
центральное процессорное устройство, ЦПУ;
схема гальванической изоляции, СГИ;
формирователи интерфейса RS-485, ФИ1…ФИ2;
устройство индикации, УИ.
УА содержит СФЗ, ВК, ИУ, ПН1.ПН4, ИП1, ВИОН.
УУ содержит АЦП, ЦПУ, СГИ, ФИ1, ФИ2, ИП2, ИП3,
УИ.

Рисунок 3.6 - Структурная схема модуля AI-12
Принцип работы модуля состоит в следующем.
Входной сигнал, проходя через СФЗ, поступает на входы коммутатора ВК,
управляемого ЦПУ при помощи сигналов АA0 и АA1. Далее сигнал с выбранного
канала ВК подается на вход дифференциального измерительного усилителя ИУ,
выполненного на базе прибора AD620. В ИУ осуществляется усиление входного
сигнала для приведения его к значению, необходимому для преобразования в АЦП
(0…+ 5В).
С выхода измерительного усилителя сигнал
подается на вход 12-разрядного аналого-цифрового преобразователя (АЦП) с
последовательным выходом, выполненного на базе прибора AD7893.
Преобразование начинается по сигналу START ЦПУ,
после преобразования данные об измерениях в последовательном коде по протоколу
SPI передаются в ЦПУ, где происходит их дальнейшая обработка.
Все цепи модуля гальванически изолированы от
каналов интерфейса RS-485 и внешних цепей питания. Гальваническая развязка
обеспечивается схемой гальванической изоляции (СГИ) и изолирующими
преобразователями напряжения ИП1…ИП3. СГИ построена на основе высокоскоростных
оптронов HCPL-0630 фирмы HP. ИП2 и ИП3 построены на базе DC/DC конвертеров
фирмы TRACO и формируют напряжения, необходимые для питания системной и
интерфейсной частей модуля соответственно. Напряжение гальванической развязки
между внешними (сеть RS-485 и питание) и системными цепями модуля составляет не
менее 500 В.
Развязывающие преобразователи напряжения ПН1…ПН4
обеспечивают независимое питание датчиков, подключенных к разным каналам. К
модулю можно подключать активные датчики (АД) и пассивные (ПД). АД содержат
собственный источник питания и подключаются к входам модуля +IN и -IN. ПД не
имеют собственного источника питания и запитываются от встроенных в модуль
ПН1…ПН4, которые формируют напряжение 24 В.
Устройство индикации необходимо для отображения
текущего состояния модуля.
Модуль DI-11 имеет восемь каналов для
подключения датчиков дискретных сигналов типа «сухой контакт» с целью
дальнейшей обработки сигналов микропроцессорными средствами. Модуль преобразует
сигналы, полученные с датчиков, в 8-разрядный цифровой код, доступный для
считывания по сети RS-485.
Технические характеристики модуля DI-11
приведены в таблице 3.5
Таблица 3.5 - Технические характеристики модуля
DI-11
|
Наименование
параметра
|
Значение
параметра
|
|
Количество
каналов ввода дискретных сигналов
|
8
|
|
Напряжение
питания датчиков, В
|
24
± 5%
|
|
Номинальный
входной ток, мА
|
6...8
|
|
Сопротивление
датчика, соответствующее состоянию “ВКЛЮЧЕНО”, Ом, не более
|
1000
|
|
Сопротивление
датчика, соответствующее состоянию «ВЫКЛЮЧЕНО», кОм, не менее
|
10
|
|
Постоянная
времени аппаратного фильтра, мс
|
22
|
|
Ток,
потребляемый модулем от источника питания, мА, не более
|
150
|
Модуль состоит из двух основных устройств:
устройства приема дискретных сигналов, УПДС;
устройства управления, УУ.
УПДС предназначено для питания дискретных
датчиков, обеспечения гальванической развязки входных сигналов от системных
цепей, фильтрации входных сигналов и преобразования этих сигналов в TTL-уровень
для дальнейшей обработки в УУ. УПДС также ограничивает ток во входных цепях
модуля до искробезопасных значений. УУ обеспечивает обработку сигналов,
формируемых УПДС, их преобразование в 8-разрядный цифровой код, работу модуля в
локальной сети, индикацию состояния модуля, а также некоторые служебные
функции.
Структурная схема модуля, показанная на рисунке
3.7, содержит следующие функциональные узлы:
устройство сопряжения с входными сигналами, УС;
схемы гальванической изоляции, СГИ1 и СГИ2;
буферный формирователь, БФ;
изолирующие преобразователи напряжения, ИП1…ИП3;
центральное процессорное устройство, ЦПУ;
формирователи интерфейса RS-485, ФИ1…ФИ2;
устройство индикации, УИ.
УПДС содержит УС, СГИ1, БФ, ИП1.
УУ содержит ЦПУ, СГИ2, ФИ1, ФИ2, ИП2, ИП3, УИ.
Принцип работы модуля состоит в следующем. При
срабатывании датчика на соответствующем входе УС появляется активный уровень,
который, попадая на СГИ1 открывает оптрон нужного канала. Дискретный сигнал с
выхода СГИ1 попадает на соответствующий вход буферного формирователя БФ, где
осуществляется фильтрация сигнала. Выходы БФ соединены с входами ЦПУ, где
происходит считывание и дальнейшая программная обработка состояния дискретных
входов.

Рисунок 3.7 - Структурная схема модуля DI-11
Все цепи модуля гальванически изолированы от
каналов интерфейса RS-485 и внешних цепей питания. Гальваническая развязка
системных цепей модуля от цепей, выведенных на разъем Х1, обеспечивается схемой
гальванической изоляции СГИ2 и изолирующими преобразователями напряжения
ИП2…ИП3. СГИ2 построена на основе высокоскоростных оптронов HCPL-0630 фирмы HP.
ИП2 и ИП3 построены на базе DC/DC конвертеров фирмы TRACO и формируют
напряжения +5V и +5VA, необходимые для питания системной и интерфейсной частей
модуля соответственно. Напряжение гальванической развязки между внешними (сеть
RS-485 и питание) и системными цепями модуля составляет не менее 500 В.
Гальваническая развязка системных цепей модуля
от объектных цепей обеспечивается схемой гальванической изоляции СГИ1 и
изолирующим преобразователем напряжения ИП1. Основой СГИ2 являются оптроны
TLP-280, ИП1 построен на базе DC/DC конвертера TRACO и предназначен для
формирования напряжения ± 12В, необходимого для питания дискретных датчиков.
В модуле предусмотрена возможность подключения
входов как по схеме «общий плюс», так и по схеме «общий минус».
Устройство сопряжения со входными сигналами УС
необходимо для организации питания дискретных входов и ограничения входного
тока.
Буферный формирователь БФ выполнен на базе
RC-фильтров и триггеров Шмитта; он предназначен для защиты от ложных
срабатываний и приведения дискретного сигнала к TTL- уровню. Постоянная времени
фильтров - 22 мс.
Устройство индикации УИ необходимо для
отображения текущего состояния модуля и его входов.
Модуль DIO-11 имеет четыре канала для
подключения датчиков дискретных сигналов типа «сухой контакт» с целью
дальнейшей обработки сигналов микропроцессорными средствами и четыре дискретных
канала вывода с выходом типа MOSFET output. Модуль преобразует сигналы,
полученные с датчиков, в 4-разрядный цифровой код, доступный для считывания по
сети RS-485, а также управляет состоянием выходов по команде «ведущего»
устройства по сети RS-485.
Основные технические характеристики модуля
DIO-11 приведены в таблице 3.6
Таблица 3.6 - Технические характеристики модуля
DIO-11
|
Наименование
параметра
|
Значение
параметра
|
|
Количество
каналов ввода дискретных сигналов
|
4
|
|
Напряжение
питания датчиков, В
|
24,5
± 5%
|
|
Номинальный
входной ток, мА
|
6...8
|
|
Сопротивление
датчика, соответствующее состоянию «включено», Ом, не более
|
1000
|
|
Сопротивление
датчика, соответствующее состоянию «выключено», кОм, не менее
|
10
|
|
Постоянная
времени аппаратного фильтра, мс
|
22
|
|
Количество
каналов вывода дискретных сигналов
|
4
|
|
Максимальный
ток нагрузки выхода, мА
|
100
|
|
Максимальный
ток нагрузки группы выходов , мА
|
250
|
|
Максимальное
напряжение на закрытом ключе выхода, В
|
50
|
|
Ток
срабатывания защиты выходов4, мА, не более
|
300
|
|
Ток,
потребляемый модулем от источника питания, мА, не более
|
130
|
Модуль состоит из трех основных устройств:
устройства приема дискретных сигналов, УПДС;
устройства вывода дискретных сигналов, УВДС;
устройства управления, УУ.
УПДС предназначено для питания дискретных
датчиков, обеспечения гальванической развязки входных сигналов от системных
цепей, фильтрации входных сигналов и преобразования этих сигналов в TTL-уровень
для дальнейшей обработки в УУ. УПДС также ограничивает ток во входных цепях
модуля до искробезопасных значений. УВДС предназначено для управления
дискретными выходами модуля по командам УУ, обеспечения гальванической развязки
выходных сигналов от системных цепей и отключение выходов при их перегрузке по
току. УУ обеспечивает обработку сигналов, формируемых УПДС, их преобразование в
4-разрядный цифровой код (информация о состоянии дискретных входов отображается
в четырех младших битах 16-разрядного регистра), формирование сигналов для
управления УВДС, управление устройством защитного отключения выходов (УЗОВ),
работу модуля в локальной сети, индикацию состояния модуля, а также некоторые
служебные функции.
Структурная схема модуля, показанная на рисунке
3.8, содержит следующие функциональные узлы:
устройство сопряжения со входными сигналами, УС;
схемы гальванической изоляции, СГИ1 и СГИ2;
буферные формирователи, БФ1 и БФ2;
устройство формирования выходных сигналов, УФВС;
устройство защитного отключения выходов, УЗОВ;
изолирующие преобразователи напряжения, ИП 1…ИП
3;
центральное процессорное устройство, ЦПУ;
формирователи интерфейса RS-485, ФИ1…ФИ2;
устройство индикации, УИ.
УПДС содержит УС, СГИ1, БФ1, ИП1.
УВДС содержит УФВС, УЗОВ, БФ2.
УУ содержит ЦПУ, СГИ2, ФИ1, ФИ2, ИП2, ИП3, УИ.

Рисунок 3.8 - Структурная схема модуля DIO-11
Если в УУ приходит команда на включение
дискретного выхода, на соответствующем входе буферного формирователя БФ2
появляется активный уровень, и, при отсутствии сигнала запрещения выходов “RY”
от устройства защитного отключения выходов УЗОВ, БФ2 включает соответствующий
канал устройства формирования выходных сигналов УФВС. При превышении суммарного
тока выходов величины примерно 270 мА, УФВС формирует сигналы “CO” и “COM1”, которые
попадают на УЗОВ. УЗОВ в свою очередь формирует сигнал запрещения выходов “RY”
на входе БФ2 и признак перегрузки выходов “ST2” на входе центрального
процессорного устройства ЦПУ.
Гальваническая развязка системных цепей модуля
от объектных цепей обеспечивается схемой гальванической изоляции СГИ1 и
изолирующим преобразователем напряжения ИП1 (для дискретных входов), а также
устройством формирования выходных сигналов УФВС (для дискретных выходов).
Основой СГИ1 являются оптроны TLP-280 фирмы TOSHIBA, ИП1 построен на базе DC/DC
конвертера TRACO и предназначен для формирования напряжения ± 12 В,
необходимого для питания дискретных датчиков.
УФВС построено на базе твердотельных реле с
выходом типа MOSFET output, допускающих любую полярность подключения нагрузки.
Кроме указанных выше функций УФВС также формирует сигналы “OUTOs.. .OUT3s” для
устройства индикации УИ а также сигналы «CO» и «COM1», говорящие о превышении
допустимого значения суммы токов в выходных каналах.
Устройство сопряжения со входными сигналами УС
необходимо для организации питания дискретных входов и ограничения входного
тока.
Буферный формирователь БФ2 построен на базе
логических элементов ИЛИ-НЕ; он включает соответствующий канал УФВС в случае
появления на его входе сигнала OUT0…OUT3 с ЦПУ и отсутствии сигнала запрещения
выходов «RY».
Устройство индикации УИ необходимо для
отображения текущего состояния модуля, его входов и выходов.
.3 Функциональная схема автоматизации агрегата
Функциональная схема автоматизации МНА
представлена на рисунке 3.9.
Как видно из схемы контроль утечек из торцевых
уплотнений насосов (поз. 1) необходим в связи с тем, что превышение допустимого
уровня утечек служит сигналом разрушения торцевых уплотнений. Утечки
скапливаются в корпусе этих уплотнений, откуда отводятся по общему коллектору в
емкость.
Разрушение подшипников скольжения магистральных
насосных агрегатов обычно происходит при попадании в него механических частиц,
принесённых маслом, или при неправильной (неточной) установке подшипника.
Неисправности в подшипниках скольжения обнаруживается по повышению их
температуры. Также повышение температуры может являться следствием
неудовлетворительной работы системы охлаждения масла. Практика показывает, что
наибольшее число аварийных отключений насосных агрегатов происходит от
срабатывания температурной защиты. Температурный контроль осуществляется за
всеми подшипниками насоса (поз.2-1,2-2) и электродвигателя (поз.2-3,2-4). Кроме
того, контролируется температура корпуса насоса (поз.3) и температура
электродвигателя (поз.4, 5,6). Для контроля температуры используются
преобразователи сопротивления.
Защита МНА по параметрам перекачиваемой жидкости
обеспечивается преобразователями давления, контролирующими давление во
всасывающем и нагнетательном трубопроводах. Манометр и преобразователь давления
(поз.9-1, 9-2), установлены на стойке приборной агрегата, а их импульсные линии
выведены на приемный трубопровод у входной задвижки, отслеживают давление,
характеризующее кавитационный режим насоса. Защита по минимальному давлению на
приеме осуществляется с выдержкой времени, благодаря чему исключается реакция
схемы на кратковременное снижение давления при включении насосов и прохождении
по трубопроводу небольших воздушных пробок.
Значение минимального давления на приемном
трубопроводе дает сигнал в схему управления агрегатом, прерывая процесс запуска
в случае отсутствия требуемого давления после открытия задвижки на приемном
трубопроводе.
Манометр и преобразователь давления (поз.10-1,
10-2), установлены на стойке приборной агрегата, а их импульсные линии выведены
на выкидной трубопровод у выходной задвижки, отслеживают допустимое давления по
условиям механической прочности оборудования.
Если давление на нагнетательном трубопроводе
превышает допустимое значение по условиям механической прочности оборудования,
арматуры и трубопровода, это приводит к автоматической остановке агрегата.
Контроль вибрации насоса и двигателя позволяет
установить нарушения в работе агрегата, вызываемые некачественной сборкой,
появлением дисбаланса, износом подшипников, усталостью металла.
Уменьшение давления масла перед подшипниками
может явиться причиной износа подшипников и их перегрева. Давление масла перед
подшипниками контролируется преобразователями давления и техническим манометрам
(поз.11-1, 11-2). Отключение агрегата происходит при уменьшении давления до
0,25 кПа.
Датчик-реле давления контролирует: давление в
безпромвальной камере (поз.12). При падении давления ниже установленного
значения включается сигнализация, а после выдержки времени происходит остановка
агрегата.
Перечень приборов автоматизации магистрального
насосного агрегата приведен в таблице 3.7.
Таблица 3.7 - Перечень приборов автоматизации
МНА
|
Позиция
|
Наименование
|
Количество
|
Примечание
|
|
1
|
Датчик
контроля скорости утечек взрывозащищенный ДС-СУ1-01 0ExiaIIBT3
|
1
|
|
|
2-1…2-4
|
Термопреобразователь
сопротивления взрывозащищенный ТСМ-320М 1ExiaIIBT3
|
4
|
|
|
3
|
Термопреобразователь
сопротивления взрывозащищенный ТСМ-012-19 1ЕхdIIВТ3
|
1
|
|
|
4
|
Термопреобразователь
сопротивления взрывозащищенный ТСМ-319М 1ExiaIIBT3
|
6
|
Комплектно
с двигателем
|
|
5,
6
|
Термопреобразователь
сопротивления взрывозащищенный ТСП-319М.11 1ExiaIIBT3
|
4
|
Комплектно
с двигателем
|
|
7
|
Система
вибрационного контроля агрегатов СВКА 12
|
1
|
|
|
7-1…7-4
|
Вибропреобразователь
взрывозащищенный АНС-066-02 1ExiaIIBT4
|
4
|
|
|
9-1,
10-1, 11-1
|
Преобразователь
давления взрывозащищенный YOKOGAWA EJX 430A 0ExdIIСТ4
|
3
|
|
|
9-2,
10-2, 11-2
|
Манометр
технический МПТИ-У2
|
3
|
|
|
12
|
Датчик-реле
давления Kromschroder DG-B
|
1
|
|
|
14
|
Преобразователь
измерительный мощности активной/реактивной Омь-6.3
|
1
|
|
|
15
|
Преобразователь
измерительный переменного тока Омь-4.04
|
1
|
|
Большинство агрегатных защит срабатывает только
в процессе пуска или при работающем агрегате. Для некоторых защит
предусматривается задержка между возникновением аварийного сигнала и защитным
отключением.
Все защиты агрегата выполнены по схеме, не
допускающей повторного дистанционного запуска агрегата после остановки
устройством автоматической защиты. Разрешение на повторный запуск дается
ключом, установленным на блоке устройства защиты агрегата, размещаемом в
операторной перекачивающей насосной. Повторный запуск может осуществляться
только после выяснения ремонтным персоналом причин отклонения параметра от
нормы и проведении соответствующих ремонтных работ.
Защита агрегата при срабатывании устройств
электрической защиты электродвигателя требуется для отключения насоса от
трубопроводной обвязки перекачивающей насосной. Неисправность цепей управления
масляным выключателем электродвигателя МНА может привести к крупной аварии, так
как при этом двигатель не может быть остановлен ни кнопками «стоп»,
установленными у насоса и электродвигателя, ни дистанционно из операторной или
диспетчерской. Остановка основного электродвигателя агрегата в этом случае
осуществляется устройствами его электрической защиты.
Список противоаварийных защит приведен в таблице
3.8.
Таблица 3.8 - список противоаварийных защит
|
№
сценария защиты
|
Позиция
|
Условия
срабатывания
|
Действия
технологического оборудования и сигнализация при срабатывании защит
|
|
1
|
1
|
Утечки
нефти торцевых уплотнений 0.3 л/ч
|
Без
выдержки времени: - визуальная и звуковая сигнализация, оперативное сообщение
в операторной, МДП. С выдержкой времени 1 с: - остановка МНА; - сообщение о
срабатывании защиты в операторной, МДП.
|
|
2
|
2-1,
2-2, 2-3, 2-4, 3
|
Температура
подшипников МНА, корпуса насоса 80 °С
|
Без
выдержки времени: - визуальная и звуковая сигнализация, оперативное сообщение
в операторной, МДП. С выдержкой времени 1 с: - остановка МНА; - сообщение о
срабатывании защиты в операторной, МДП; - АВР МНА.
|
|
4
|
Температура
обмоток статора ЭД 120°С
|
|
|
5
|
Температура
воздуха ЭД на выходе 90 °С
|
|
|
6
|
Температура
воздуха в корпусе ЭД 10 °С
|
|
|
3
|
7-1,
7-2, 7-3, 7-4
|
Вибрация
подшипников МНА 7,1 мм/с
|
Без
выдержки времени: - визуальная и звуковая сигнализация, оперативное сообщение
в операторной, МДП. С выдержкой времени 5 с: - остановка МНА; - сообщение о
срабатывании защиты в операторной, МДП; - АВР МНА.
|
|
4
|
11-1
|
Давление
масла к подшипникам 25 кПа
|
Без
выдержки времени: - визуальная и звуковая сигнализация, оперативное сообщение
в операторной, МДП. С выдержкой времени 5 с: - остановка МНА; - сообщение о
срабатывании защиты в операторной, МДП; - АВР МНА.
|
|
5
|
12
|
Давление
в камере пневмозащиты 0,2 кПа
|
Без
выдержки времени: - визуальная и звуковая сигнализация, оперативное сообщение
в операторной, МДП. С выдержкой времени 2 с: - остановка МНА; - сообщение о
срабатывании защиты в операторной, МДП.
|
Существующая система вибромониторинга не
удовлетворяет требованиям нормативно - технической документации ОАО
«Транснефть» [6], а именно:
не установлены на всех подшипниковых опорах
насоса и электродвигателя МНА датчики для измерения горизонтальной вибрации
датчики для измерения осевой вибрации
отсутствует на подшипниковой опоре насоса и электродвигателя МНА, со стороны
радиально-упорного подшипника;
отсутствуют датчики контроля осевого смещения
ротора.
В виду того, что в существующей системе
вибромониторинга отсутствует возможность измерения комплекса параметров
(виброскорость, осевой сдвиг), тем самым отсутствует выдача тревожных сообщений
и включение агрегатных защит по данным параметрам, что может привести к
аварийной ситуации.
Также не реализована защита по вибрации в момент
запуска агрегата 18 мм/c ввиду того, что верхний предел измерений существующей
системы вибромониторинга ограничен скоростью 12 мм/с.
В связи с этим необходимо произвести замену
существующей системы вибромониторинга на более совершенную.
3.4 Анализ средств измерения уровня вибрации
Основным измеряемым параметром динамического
оборудования, характеризующим его техническое состояние, является вибрация.
Результаты исследований влияния различных видов дефектов на функционирование
машин подтвердили, что наибольшей диагностической информацией обладает именно
сигнал вибрации. Характер и масштабы изменения вибрации во времени для каждого
случая индивидуальны, конкретный вибрационный процесс содержит большой объем
важнейшей информации, использование которой позволяет диагностировать
техническое состояние механизмов и машин и рационально устранять многие
дефекты. По уровню и характеру вибрации можно не только оценить текущее
состояние агрегата в целом и его узлов в частности, но и определить оптимальное
время вывода агрегата в ремонт, оценить качество ремонта и спрогнозировать его
стоимость. На этом принципе основано популярное на западе и еще только
зарождающееся у нас обслуживание по техническому состоянию.
Исследования показали, что более 50%
оборудования, ремонтируемого при проведении планово-предупредительного ремонта,
на самом деле в ремонте не нуждается. Таким образом при применении систем
вибродиагностики и при переходе на техническое обслуживание по состоянию
возможно снизить затраты на ремонт по крайней мере на треть.
Измерительные преобразователи вибрации и осевого
смещения.
Достоверность измерений и корректность
поставленных диагнозов во многом определяются качеством измерительных каналов.
Первым звеном любого измерительного канала, предназначенным для измерения
неэлектрической величины, являются датчики - измерительные преобразователи (ИП).
ИП - это средства измерений, преобразующие измеряемую неэлектрическую величину
в другую физическую величину, например, электрическую, удобную для передачи на
расстояние информации об измеренной величине. При разработке и изготовлении
датчиков необходимо обеспечить минимальную зависимость их параметров от
различных видов внешних воздействий: температуры, давления, влажности,
магнитных и электрических полей, промышленных помех и наводок, ударных
нагрузок, радиационного облучения, проникновения влаги и газов. В аппаратуре
виброконтроля широко применятся пьезоэлектрические акселерометры, наиболее
полно обеспечивающие необходимые характеристики.
Как ясно из названия, в основу работы данного
типа приборов положен пьезоэффект - явление возникновения разности потенциалов
на пьезокристалле при его механической деформации. Конструктивно
пьезоэлектрический вибропреобразователь представляет собой металлическое
основание, на котором установлены пьезоэлементы с укрепленным сверху грузом
фиксированной массой Вибрации оборудования передаются на корпус
вибропреобразователя и он перемещается вместе с пьезоэлементом. Инерционная
масса, воздействует на пьезоэлементы с силой, пропорциональной ускорению. Это
соответствует закону, согласно которому сила равна произведению массы и
ускорения. На поверхности пьезоэлементов возникает заряд, пропорциональный
величине ускорения. Основным назначением приёмного чувствительного блока
является преобразование вибрации в электрический сигнал, а характер его
дальнейшей обработки определяется параметрами электронной схемы.
Внешний вид датчиков и их размеры во многом
определяются способами крепления и габаритами измерительных преобразователей.
Информативность сигнала датчика зависит от способа установки датчика на
контролируемой точке. Стационарно установленные датчики позволяют наиболее
достоверно определять наличие и вид неисправности. Особое внимание уделено
разработке двухпроводных выходных схем, в которых напряжение питания и сигнал
подаются одновременно по одним и тем же проводникам. Аналоговый выходной сигнал
по напряжению обеспечивается стандартом ICP, разработанным специально для
пьезоакселерометров.
Датчики на основе прямого пьезоэлектрического
эффекта наиболее широко распространены во многих отраслях промышленности, имеют
характеристики, удовлетворяющие всем требованиям к датчику вибрации, и
достаточно низкую стоимость. По виду выходной величины пьезоэлектрические
преобразователи относятся к генераторным датчикам, в них используется эффект
образования электрических зарядов на поверхности пьезоэлектрика и электрической
поляризации внутри него, которые происходят в результате деформаций сжатия и
растяжения. Для обеспечения сигнализации обрыва антивибрационного кабеля
параллельно емкости ИП включен резистор. Выходной сигнал по кабелю поступает на
вход платы устройства связи с объектом (УСО). Наиболее распространенным методом
обработки сигнала пьезоэлектрического вибропреобразователя является усиление
заряда. Весь генерируемый заряд накапливается на конденсаторе обратной связи С
усилителя заряда, а выходное напряжение U0 равно:
 (3.1)
(3.1)
где К - коэффициент преобразования; х - величина
деформации; t - время.
Функции аналого-цифровых преобразователей,
вольтметра СКЗ переменного компонента входного напряжения, регулятора усиления
цифрового, компаратора уровней и кодового модулятора выполняет микроконтроллер
[11].
Для контроля осевого смещения используются
вихретоковые преобразователи (вихретоковые датчики).
Вихретоковый преобразователь состоит из бесконтактного
вихревого пробника, удлинительного кабеля и электронного блока. Преобразователь
часто называют вихретоковой датчиковой системой. Вихревой пробник представляет
собой металлический зонд с диэлектрическим наконечником (в который заключена
катушка) на одном конце и отрезком коаксиального кабеля на другом. С помощью
коаксиального удлинительного кабеля пробник подключается к электронному блоку.
Электронный блок вырабатывает сигнал возбуждения
пробника и осуществляет выделение информативного параметра. Выходным сигналом
является электрический сигнал, прямо пропорциональный расстоянию от торца
вихревого пробника до контролируемого объекта.
В торце диэлектрического наконечника вихревого
пробника находится катушка индуктивности.
Если материал обладает электропроводностью, на
его поверхности наводятся вихревые токи, которые, в свою очередь, изменяют
параметры катушки - ее активное и индуктивное сопротивление. Параметры меняются
при изменении зазора между контролируемым объектом и торцом датчика.
Электронный блок преобразует эти изменения в
электрический сигнал, осуществляет его линеаризацию и масштабирование.
Вихретоковые преобразователи обладают хорошим
частотным откликом (реакция на изменение расстояния между торцом пробника и
объектом контроля). Частотный диапазон может достигать 0 - 10 000 Гц. При этом
неравномерность амплитудно-частотной характеристики не превышает 0,5 дБ.
Входным параметром вихретокового преобразователя
является величина зазора между торцом пробника и электропроводящим объектом.
Величина измеряемого зазора составляет несколько миллиметров и зависит от диаметра
катушки, заключенной в торце диэлектрического наконечника. Выходной сигнал,
пропорциональный измеряемому зазору, может быть представлен в виде напряжения,
тока или в цифровом формате.
Приоритетной областью использования вихретоковых
преобразователей является контроль осевого смещения валов магистральных
агрегатов, в которых используются подшипники скольжения. Применение для этих
целей датчиков скорости и ускорения, хотя и допустимо, но неоправданно,
поскольку из-за уменьшения коэффициента пропорциональности между вибросмещением
ротора и опоры на низких скоростях вращения, а также значительного (3…10 раз)
ослабления вибрации ротора массивным корпусом установки, результат будет иметь
большую погрешность. Вихретоковый метод, напротив, обладает исключительной
точностью, поскольку не только не имеет нижнего предела по частоте, но и не
требует математической обработки результатов измерения ввиду прямого
соответствия выходного сигнала текущему смещению вала или измерительного
буртика относительно корпуса.
Способы построения систем контроля вибрации.
Для реализации функций мониторинга, управления и
защиты на современных производственных объектах максимально используются
микропроцессорные устройства.
Противоаварийные системы предназначены для
защиты оперативного персонала и оборудования. К таким системам предъявляются
повышенные требования:
по надежности - она должна быть не ниже, чем
надежность защищаемого оборудования с обеспечением безопасности обслуживающего
персонала;
по устойчивости - неисправности в отдельных
каналах приборов и систем не должны быть причиной выхода из строя и не должны
влиять на работу других каналов;
по ремонтопригодности - наилучшим способом
восстановления работоспособности приборов и систем должна быть возможность
замены отдельного канала на работающем оборудовании без отключения функций
защит.
Применяют три основных варианта построения
систем защиты по вибрации (рисунок 3.10):
на основе «виброключа» с прямым управлением
исполнительными механизмами (оборудованием);
на основе микропроцессорной системы защиты,
которая выполнена как полуавтономная система, интегрированная в общую
технологическую защиту без прямого управления исполнительными механизмами;
на основе микропроцессорной системы защиты,
которая выполнена как полуавтономная система с прямым управлением
исполнительными механизмами (оборудованием) и параметрической связью с общей
противоаварийной защитой.
Основными
достоинствами первого варианта построения системы защиты являются высокая
скорость отработки защит; независимость системы и низкая стоимость. К
недостаткам можно отнести сложности реализации резервирования и отсутствие
дистанционного управления защитой.

Рисунок 3.10 - Варианты построения систем
контроля вибрации
Основными достоинствами второго варианта
являются высокая интеграция систем и возможность резервирования схем защиты. К
недостаткам можно отнести возможные задержки при отработке защиты; высокую
стоимость и необходимость дополнительных усилий по повышению надежности.
К достоинствам третьего варианта можно отнести
высокую скорость
отработки
защит; независимость системы; относительно невысокую стоимость и возможность
контроля за отработкой защиты других систем; к недостаткам - сложности при
реализации резервирования и необходимость дополнительных усилий, направленных
на реализацию возможности управления защитой с верхнего уровня.
Высокий уровень качества защиты обеспечивают
полуавтономные системы, которые обладают достаточной надежностью и
быстродействием.
Информация от вибропреобразователей может быть
передана в системы защиты двумя способами:
включением вибропреобразователей напрямую в
действующую систему АСУТП;
включением вибропреобразователей в
микропроцессорную систему защиты по вибрации с последующей обработкой и
дублированным выводом информации в другие системы по аналоговому или цифровому
каналу.
Основными достоинствами первого способа передачи
информации являются низкая стоимость и использование существующих контроллеров,
а недостатками - задержки при обработке сигналов; низкая информативность
сигналов; низкий уровень готовности и ремонтопригодности систем.
Второй способ передачи информации имеет более
высокую стоимость, но обладает такими преимуществами, как быстродействие,
возможность точной оценки состояния оборудования и высокий уровень готовности и
ремонтопригодности системы защиты.
Согласно нормативно-технической документации АК
«Транснефть» в компании применяется второй вариант построения систем защиты по
вибрации и второй способ передачи информации.
Объем каналов контроля вибрации определяется в
соответствии с типом оборудования и должен формируется на основании требований
служб эксплуатации, ответственных за агрегат. Объем каналов, место и способ
установки преобразователей на контролируемый агрегат задаются нормативными
документами. В АК «Транснефть» для агрегата с четырьмя подшипниками необходимо
использовать комбинацию из 10 каналов вибрации.
Микропроцессорные устройства должны выполнять
следующие обязательные функции:
прием сигналов от преобразователей с последующей
обработкой принятых сигналов;
автоматическую постоянную самодиагностику
устройства и измерительных каналов с индикацией неисправностей;
сравнение сигналов с уставкой срабатывания и
отсчетом выдержек времени на срабатывание;
формирование сигнала на срабатывание
исполнительных устройств защиты не более чем за 0,1 с;
формирование информации в смежные системы АСУ
ТП;
выдачу сигнала о возникновении неисправности,
вспомогательную индикацию отказа [12].
.5 Обзор систем виброконтроля
Система контроля вибрации «Каскад».
Контрольно-сигнальная и диагностическая
аппаратура «Каскад» предназначена для автоматического контроля вибрации и
механической величины (осевого сдвига) сбора и обработки вибросигналов,
выявления дефектов непрерывно работающего промышленного оборудования [13].
Система контроля вибрации «Каскад» состоит из
следующих элементов:
прибора для измерения и контроля вибрации
«Каскад»;
прибора измерения осевого сдвига ВК-306.
Прибор состоит из вибропреобразователей ВК-312 и
вторичных блоков вибропреобразователей ВК-321.
Прибор обеспечивает выполнение следующих
основных функций:
индицирование на передней панели состояния
превышения предупредительного и аварийного уровней вибрации;
регулирование уровня срабатывания
предупредительной и аварийной сигнализации;
запоминание факта срабатывания аварийной
сигнализации с последующим ручным сбросом;
формирование сигнала для управления внешними
устройствами защиты при превышении установленных предупредительного и
аварийного уровня виброскорости;
формирование выходных сигналов напряжения и
тока, пропорциональных уровню виброскорости контролируемого объекта;
обеспечение питанием согласующий усилитель
вибропреобразователя по искробезопасной цепи;
индицирование неисправностей (обрыв или короткое
замыкание) линий связи с вибропреобразователем;
измерение среднеквадратического значения (СКЗ)
виброскорости полигармонической вибрации контролируемого объекта с непрерывной
индикацией его значения на встроенном цифровом и линейном индикаторах;
осуществление автономного контроля
работоспособности блока.
Прибор позволяет автоматически оповещать о
превышении предупредительного и аварийного уровней виброскорости и формировать
сигналы типа «сухой контакт» в виде замыкания контактов внутренних реле по
каждому каналу. Эти сигналы могут быть использованы в системах автоматики для
отключения агрегата и/или для включения дополнительной звуковой и/или световой
сигнализации.
Пьезоэлектрический преобразователь (далее -
датчик) устанавливается на контролируемом агрегате. Вибропреобразователи ВК-312
состоят из датчика и предусилителя, смонтированного в отдельном корпусе,
соединенных вибро- и термоустойчивым кабелем. Структурная схема
вибропреобразователя ВК-312 показана на рисунке 3.11.

Рисунок 3.11 - Структурная схема
вибропреобразователя ВК-312
Соединение датчика и предусилителя герметично и
неразборно.
Измерение вибрации производится в осевом
направлении датчика. Датчик преобразует механические колебания в электрический
сигнал.
Сигнал поступает на выносной согласующий
усилитель, соединенный с вибропреобразователем вибростойким кабелем в
металлорукаве.
В согласующем усилителе сигнал поступает на
входной усилитель заряда с фильтрами, а затем на интегратор. С выхода
интегратора сигнал подается на преобразователь «напряжение-ток». Параметры
этого преобразователя позволяют устанавливать вторичный блок на расстоянии до
1000 м от вибропреобразователя. Вибропреобразователь соединяется со вторичным
блоком двухпроводной линией. Преобразователь «напряжение-ток» модулирует ток в
линии связи между вибропреобразователем и вторичным блоком пропорционально
мгновенному значению виброскорости. Одновременно по этой линии, напряжение
питания поступает от вторичного блока к вибропреобразователю. Такая линия связи
отличается высокой помехоустойчивостью и отсутствием перекрестного влияния
каналов друг на друга при прокладке нескольких пар связи в одной оболочке.
Входным сигналом вторичного блока является
переменный ток, пропорциональный мгновенному значению виброскорости, который по
двухпроводной линии через барьер искрозащиты подается на преобразователь
«ток-напряжение» (рисунок 3.12).

Рисунок 3.12 - Структурная схема вторичного
блока ВК-321
Переменная составляющая напряжения с выхода преобразователя
через нормирующий усилитель поступает на детектор средних квадратических
значений (СКЗ).
Узел уставок следит за СКЗ виброскорости и
обеспечивает замыкание нормально разомкнутых контактов предупредительного и/или
аварийного реле при превышении установленных уставок.
Нормирующий усилитель обеспечивает на выходе
переменное напряжение в диапазоне 0÷3 В,
пропорциональное измеряемому СКЗ виброскорости.
Выходной преобразователь «напряжение-ток»
обеспечивает на выходе постоянный ток, пропорциональный СКЗ виброскорости в
диапазонах 0÷5 мА и 4÷20
мА
у вторичного блока ВК-321.
Блок питания обеспечивает стабилизированным
питанием вторичный блок и вибропреобразователь.
Прибор измерения осевого сдвига ВК-306 состоит
из преобразователя ВК-316, вторичного блока преобразователя ВК-361.
Прибор позволяет:
автоматически контролировать относительный
осевой сдвиг вала;
наблюдать за изменением относительного осевого
сдвига по цифровому и линейному аналогово-дискретному индикаторам;
оповещать о превышении двух предупредительных и
двух аварийных значений относительного осевого сдвига и формировать сигналы
управления в виде замыкания контактов внутренних реле.
Эти контакты могут быть использованы в системах
автоматики для отключения агрегата или для дополнительной звуковой и/или
световой сигнализации
предупреждать о неисправности (обрыв или
короткое замыкание) линии связи между блоком вторичным ВК-361 и
преобразователем ВК-316.
Преобразователь ВК-316 предназначен для
преобразования величины относительного осевого сдвига вала в унифицированный
сигнал постоянного тока. В состав преобразователя ВК- 316 входит датчик типа
ВК-316. 02 с кабелем и усилитель согласующий ВК-316. 03.
Принцип действия преобразователя основан на
использовании явления вихревых токов, которые возбуждаются на контролируемой
поверхности высокочастотным электромагнитным полем катушки датчика и создают
экранирующее поле. Степень взаимодействия этих высокочастотных полей линейно
зависит от расстояния между датчиком и контролируемой поверхностью. Изменение
величины зазора преобразуется в пропорциональное изменение выходного тока.
Унифицированный токовый сигнал обладает высокой помехозащищенностью и, кроме
того, позволяет контролировать целостность линии связи. Структурная схема
преобразователя ВК-316. 01 показана на рисунке 3.13.

Рисунок 3.13 - Структурная схема преобразователя
ВК-316
Выходным сигналом датчика является постоянный
ток диапазона от 1 до 5 мА (или, по специальному заказу от 4 до 20 мА).
Блок вторичный ВК-361 представляет собой
микропроцессорное устройство со встроенным сетевым источником питания.
Структурная схема вторичного блока показана на рисунке 3.14.

Рисунок 3.14 - Структурная схема блока
вторичного ВК-361
Блок вторичный преобразователя ВК-361
предназначен для:
вычисления и цифровой индикации относительного
осевого сдвига ротора;
обеспечения питанием усилителя согласующего
ВК-316. 03;
формирования выходных унифицированных токовых
сигналов, пропорциональных относительному осевому сдвигу;
формирования четырех дискретных сигналов
управления (типа «сухой контакт») при превышении двух предупредительных и двух
аварийных значений уставок;
контроля исправности линии связи с
преобразователем с блокировкой реле уставок при ее неисправности.
Система виброконтроля «Аргус-М»
Структурная схема каналов системы виброконтроля
и осевого сдвига «Аргус-М», показана на рисунке 3.15, состоит из модулей
контроля виброскорости (МV-6), смещения (МS-6), и блока питания (MPw), смонтированных
на каркасе [14].

Рисунок 3.15 - Структурная схема каналов
измерения вибрации и осевого сдвига «Аргус-М»
Каркас состоит из шасси с направляющими для
установки модулей; передней панели, обеспечивающей фиксацию модулей; задней
панели, обеспечивающей подключение модулей к внешним цепям и крепление защитной
крышки искробезопасных цепей.
Модули контроля являются функционально
законченными узлами, производящими контроль вибрации или смещения в точках
расположения датчиков. Все модули многоканальные, число каналов указывается в
условном обозначении модуля.
Каждый модуль состоит из шасси, печатной платы
нормирующих усилителей и передней панели с платой управления и платой
индикаторов. На задней стенке шасси расположен соединитель, обеспечивающий
присоединение модуля к схеме прибора.
Модуль блока питания состоит из вторичного
источника питания и плат контроля и интерфейса, размещенных на одном шасси.
Вторичный источник питания состоит из силового трансформатора и платы стабилизаторов,
а также схемы электронной защиты от короткого замыкания. Трансформатор выдает
гальванически развязанные напряжения для искробезопасных цепей модулей контроля
и общие стабилизированные напряжения для питания контрольных и сигнальных цепей
прибора.
Устройства связи с объектами выполнены на
печатных платах и размещены в унифицированных стальных коробках, оборудованных
средствами герметизации вводов, и обеспечивают необходимую степень защиты от
окружающей среды.
Принцип действия прибора основан на измерении
электрических параметров датчиков, преобразовании их в цифровое значение и
сравнении его с двумя задаваемыми опорными напряжениями. Каждый измерительный
модуль состоит из трех функциональных частей - платы нормирующих усилителей,
цифровой схемы управления и платы контроля и индикации. Аналоговая часть модуля
обеспечивает усиление, фильтрацию и другие необходимые преобразования входных
сигналов, а также искробезопасность входных цепей. С выхода платы нормированный
сигнал поступает на схему контроля и индикации, состоящую из двух
унифицированных плат: одинаковой для всех модулей платы процессора и платы
индикации, которая может быть выполнена в двух видах. Блок питания обеспечивает
модули необходимыми питающими напряжениями.
Канал контроля виброскорости, в общем случае,
состоит из датчика вибрации, устройства связи с объектом УСО МV-6 и модуля
контроля MV-6.
В качестве датчиков вибрации используются
пьезоэлектрические однокоординатные вибродатчики DV-1в комплекте с УСО MV-1.
Пьезоэлектрический вибропреобразователь DV-1
предназначен для получения первичной информации об уровне вибрации корпуса
роторного оборудования в точке установки датчика.
УСО МV-1 одноканальный предварительный
виброусилитель, предназначенный для работы с однокоординатными вибродатчиками
DV-1. Выполнен в виде единой печатной платы, на которой расположены три
двухкаскадных усилителя. Усилители выполнены на двух четырехканальных
малопотребляющих операционных усилителях, что позволило реализовать датчик в
виде искробезопасной цепи. Автономные одноканальные усилители MV-1 выполнены на
отдельных печатных платах, размещенных в унифицированной металлической защитной
коробке, которая соединяется с модулем МV-6 многожильным экранированным кабелем
длиной до 350 метров.
Модуль контроля вибрации MV- 6 предназначен для
усиления, фильтрации и преобразования сигнала, выдаваемого УСО, в мгновенное
значение виброускорения и среднеквадратичное значение (СКЗ) виброскорости,
оцифровывания этого значения и сравнения в цифровом виде с контрольными уставками
предупредительной и аварийной сигнализации. Он обеспечивает индикацию
принимаемых значений и состояния каждого канала, а также выдает управляющие
сигналы на цепи внешней автоматики и сигналы на включение предупредительной или
аварийной звуковой сигнализации.
В состав каждого из шести каналов аналоговой
части модуля входят:
входной буферный усилитель;
узел формирования СКЗ виброскорости, состоящий
из полосового фильтра 10 Гц - 1 кГц, интегратора и детектора
среднеквадратичного значения, с выхода которого сигнал постоянного тока после
усиления на поступает через аналоговый коммутатор на АЦП процессора;
узел формирования сигнала виброускорения;
схему выходной автоматики через которую
процессор управляет предупредительным и аварийными реле, установленными на этой
же плате.
Цифровая часть схем модулей состоит из двух
унифицированных плат: платы
процессора и платы индикации. Плата процессора
одинакова для всех модулей контроля и представляет собой специализированный
контроллер, выполненный на микропроцессоре 80С196 фирмы Intel. Для обработки
аналоговых сигналов используется восьмиканальный АЦП процессора со схемой
защиты аналоговых входов на. Программа определяет алгоритм работы контроллера в
данном модуле. В модулях процессор обеспечивает преобразование аналоговых
сигналов в цифровой код, линеаризацию характеристик датчиков и обратное
преобразование цифрового значения в линеаризованный аналоговый выходной сигнал,
индикацию в динамическом режиме цифровых значений, определение «тревожных» и
аварийных режимов на контролируемом объекте и выдачу необходимых сигналов на
схему выходной автоматики аналоговой платы модуля. Кроме этого, функцией
процессора является обеспечение связи с внешними цифровыми устройствами по
последовательному каналу.
Отдельные каналы модуля вибрации MV-6 (1, или 1
и 2) могут использоваться в режиме измерения осевого смещения (сдвига)
совместно с датчиками DS-1 и УСО МS-1.1. Для реализации этого режима сигнал с
буферного усилителя через аналоговый коммутатор поступает на АЦП процессора.
Количество каналов, работающих в режиме контроля смещения, устанавливается при
конфигурировании прибора.
Каналы осевого смещения включают в себя
токовихревые датчики и одноканальные адаптеры УСО MS-1.1, подключаемые к
модулям контроля смещения MS-6 (или вибрации MV-6). Принцип работы
токовихревого датчика основан на изменении потерь колебательного контура при
изменении расстояния от катушки до металлической поверхности.
При работе в режиме осевого смещения нулевому
значению индикатора прибора соответствует зазор датчика, равный 1,5 мм.
Положительное значение показания датчика соответствует увеличению зазора,
отрицательное - уменьшению. При выставлении уставок индикатор показывает
предельное абсолютное отклонение зазора от 1,5 мм без учета знака.
Выходная характеристика УСО MS-1.1 имеет
нелинейный характер. При настройке каждого канала прибора производятся
измерения показаний УСО в 13 точках шкалы и полученные значения записываются в
память процессора. По таблице, записанной в память, процессор осуществляет
линейную аппроксимацию выходного сигнала УСО. При замене датчика или УСО
необходимо произвести настройку канала в соответствующей комплектации.
УСО MS - 1.1 представляет собой печатную плату,
на которой расположены канал измерения добротности датчика. Функционально канал
состоит из генератора управляющих импульсов, коммутатора, управляемого
источника постоянного тока, резонансного контура, буферного усилителя высокой
частоты, высокочастотного выпрямителя, интегратора, ячейки памяти аналогового
сигнала на ёмкости, выходного каскада. Источник тока по сигналам, поступающим с
генератора, осуществляет электрические возбуждение контура датчика. В
результате в датчике возникают затухающие колебания. Время переходного процесса
(затухания) зависит от добротности контура. Продетектированный (выпрямленный)
сигнал поступает на интегратор, ёмкость которого перед каждым измерением
разряжается коммутатором. На период измерения выходной сигнал интегратора
запоминается на ёмкости. УСО MS - 1.1 выполнены в виде искробезопасной цепи и располагаются
в металлической экранирующей коробке со степенью защиты не менее IP54.
Система виброконтроля «СВКА-12».
Структурная схема канала виброконтроля «СВКА-12»
приведена на рисунке 3.16.

Рисунок 3.16 - канала виброконтроля СВКА
Система виброконтроля «СВКА-12» предназначена
для преобразования механических колебаний в электрический сигнал, для измерения
среднеквадратических значений виброскорости и мгновенных значений ускорения, а
также непрерывного преобразования сигнала в унифицированный сигнал постоянного
напряжения и тока.
Устройство состоит из вибропреобразователей,
распределительных коробок и электронного блока. В электронном блоке установлены
двенадцать измерительных блоков с взрывозащитой, один блок контроля индикации и
один блок питания. В распределительной коробке установлен согласующий
усилитель. Ячейка искрозащиты для каждого канала установлена в измерительном
блоке. Взрывозащита обеспечивает работу вибропреобразователей и их согласующий
зарядовый усилитель (СЗУ) во взрывоопасной зоне.
Пьезоэлектрический преобразователь преобразует
вибрацию в электрический сигнал. Чувствительный элемент вибропреобразователя
состоит из монолитного биморфного пьезокерамического элемента, выполненного из
керамики типа ЦТС -83Г.
СЗУ необходим для согласования выходного
сопротивления вибропреобразователя с линией связи и вторичной аппаратурой. СЗУ
расположен в корпусе распределительной коробки. Электрический сигнал с СЗУ
поступает на вход электронного блока.
Электронный блок включает в себя следующие
функциональные устройства:
фильтры верхних и нижних частот выполнены
двухкаскадными и служат для выделения рабочей полосы сигнала. Схемы ФНЧ
одновременно являются усилителями сигнала виброскорости;
интегратор, который производит интегрирование
электрического сигнала и формирование амплитудно-частотной характеристики
канала измерения (виброускорение, информация о котором в виде электрического
сигнала имеется на выходе вибропреобразователя, есть производная по времени от
скорости, поэтому для получения информации о виброскорости необходимо
произвести интегрирование электрического сигнала виброускорения);
детектор среднеквадратичный, он выделяет
среднеквадратичное значение электрического сигнала, пропорционального
виброскорости;
узел индикации, служащий для индикации
превышения уровня виброскорости свыше заданного для данного контролируемого
объекта;
установленные в измерительной ячейке
потенциометры для установки уровней срабатывания аварийного и
предупредительного сигнала.
Токовый преобразователь служит для
преобразования выходного сигнала по постоянному напряжению в сигнал по
постоянному току и выполнен на микросхеме АD694.
Блок контроля и индикации состоит из платы
контроля, платы реле и платы вольтметра.
Плата контроля включает следующие функциональные
узлы:
узел задержки питания исполнительного узла
предназначен для задержки подачи напряжения питания на исполнительный блок для
предотвращения срабатывания реле во время переходных процессов при включении;
исполнительный узел предназначен для
срабатывания сигнализации. При этом происходит замыкание контактов реле,
выведенных на разъем блока электронного;
задержки включения аварийной сигнализации и
индикации уровней;
формирования напряжения для проверки исправности
сигнализации;
формирования управляющего сигнала проверки.
Узел формирования управляющих сигналов проверки
предназначен для формирования контрольного сигнала для проверки электронного
тракта аппаратуры и выполнен как генератор импульсов прямоугольной формы.
Узел выбора канала предназначен для установки
автоматического или ручного режима выбора измерительного канала и состоит из
генератора импульсов.
Плата интерфейсная предназначена для
преобразования аналоговых сигналов датчиков в цифровой код и их передачи на
интеллектуальные устройства верхнего уровня по стандартному интерфейсу по
протоколу Modbus RTU. Диапазон входных аналоговых сигналов составляет от 0 до 5
В. Электрические входные сигналы платы соответствуют требованиям стандарта
RS-485.
Для сравнения систем виброконтроля представлена
таблица 3.8.
Таблица 3.8 - Сравнительная таблица
характеристик систем виброконтроля «Каскад», «СВКА-12»и «Аргус-М»
|
Характеристика
|
«Каскад»
|
«СВКА-12»
|
«Аргус-М»
|
|
Измеряемый
параметр
|
Виброскорость
Осевой сдвиг
|
Виброскорость
|
Виброскорость
Осевой сдвиг
|
|
Диапазон
измерения виброскорости, мм/с
|
0,5
- 30
|
1-15
|
0-24
|
|
Диапазон
измерения осевой сдвиг, мм
|
±
1
|
-
|
±
1
|
|
Значение
выходного сигнала: - по переменному напряжению, В - по постоянному току, мА
|
0
-5 4-20
|
0,1-5
4-20
|
-4-20
|
|
Количество
релейных выводов типа «сухой контакт» на канал
|
2
|
2
|
3
|
|
Интерфейсный
выход
|
-
|
RS-485
|
RS-232
RS-485
|
|
Количество
каналов
|
1
|
12
|
6
|
Из таблицы видно, что, в целом, системы
виброконтроля «Каскад», «Аргус-М» и «СВКА-12» подобны. Преимуществом систем
«Каскад» и «Аргус-М» является возможность измерения комплекса параметров:
виброскорость, осевой сдвиг.
Недостатком системы «Каскад» является отсутствие
встроенного интерфейсного выхода RS-485.
Более широкий диапазон измерения виброскорости,
системы «Аргус-М» и большее количество релейных выводов, позволяет реализовать
такую защиту, как аварийная максимальная вибрация Порог 2. Алгоритм данной
защиты должен отработать 30 секунд после запуска МНА в работу. Величина
установленного значения составляет 18,0 мм/с. Следовательно, в системе
автоматизации МНА на НПС «Субханкулово» необходимо использовать систему
виброконтроля «Аргус-М».
4. РАЗРАБОТКА ПРОГРАММЫ УПРАВЛЕНИЯ МНА С
ПРИМЕНЕНИЕМ АЛГОРИТМОВ ЗАЩИТ ПО ВИБРАЦИИ И ОСЕВОМУ СДВИГУ
.1 Программное обеспечение АРМ оператора
Программное обеспечение верхнего уровня
(прикладное программное обеспечение РС АРМ оператора), разработанное на основе
SCADA-пакета FIX фирмы Intellution (США), реализует отображение информации на
экранах мониторов РС (видеокадры, табличные формы, графики) для выполнения
технологического мониторинга, формирование трендов по измеряемым параметрам,
формирование архивной информации, файлов журнала событий и системного журнала,
формирование команд управления с пункта оператора.
Кроме обеспечения основных задач ПО СА реализует
дополнительные специальные функции, необходимые для работы оператора в реальной
обстановке: маскирование параметров, установление признака недостоверности
аналоговых параметров системными средствами или ручным вводом, имитация
аналоговых параметров, испытательный режим аналоговых и дискретных параметров,
имитация состояния задвижек (кроме агрегатных), квитирование звуковой и
световой сигнализации, ограничение доступа к системе.
АРМ оператора представляет комплекс аппаратно -
программных средств, включенных постоянно. Отображаемые на мониторе видеокадры
(экраны) воспроизводят технологический процесс перекачки нефти и работу
вспомогательных систем в реальном масштабе времени. Каждый экран дает наглядное
представление о технологическом процессе или работе отдельного технологического
узла. Верхняя часть каждого экрана содержит общую информацию о состоянии НПС и
технологическом процессе и дает возможность вызова любого другого экрана. В
нижней части каждого экрана имеется поле для вывода оперативных сообщений об
изменении состояния оборудования НПС, неисправностях и аварийных ситуациях. На
всех экранах используется упрощенное изображение объектов автоматизации,
анимированное цветом в зависимости от текущего состояния.
Отображаемые на мониторе видеокадры (далее
экраны) воспроизводят технологический процесс перекачки нефти и работу
вспомогательных систем в реальном масштабе времени. Каждый экран дает наглядное
представление о технологическом процессе или работе отдельного технологического
узла.
Система автоматически сохраняет необходимые
данные о технологических параметрах, поступивших сообщениях о событиях и
действиях оператора для последующего анализа событий процесса. Кроме этого
система формирует необходимый набор сводок и отчетов о состоянии технологического
оборудования, которые могут быть просмотрены на экране и, при необходимости
распечатаны.
Система так же обеспечивает сбор и долгосрочное
хранение трендов всех технологических параметров.
Все необходимые для работы программы запускаются
автоматически при запуске системы и не требуют никакого вмешательства при
работе.
Доступ к тем или иным программам и различным
функциям управления системой разграничен паролями пользователей. После
регистрации пользователя в системе все дальнейшие действия происходят от его
имени.
Для удобства работы весь технологический процесс
разбит на мнемокадры, на каждом из которых представлена технологическая схема
отдельной функционально законченной подсистемы НПС. На рисунке 4.1 представлен
общий мнемокадр технологической схемы НПС.
.2 Программное управление МНА
Контроль состояния и готовности к пуску МНА.
Состояния насосного агрегата определяется
состоянием двигателя, задвижек и выбранным режимом управления. Агрегат может
находиться в одном из трех состояний:
отключен;
в процессе пуска;
в работе.
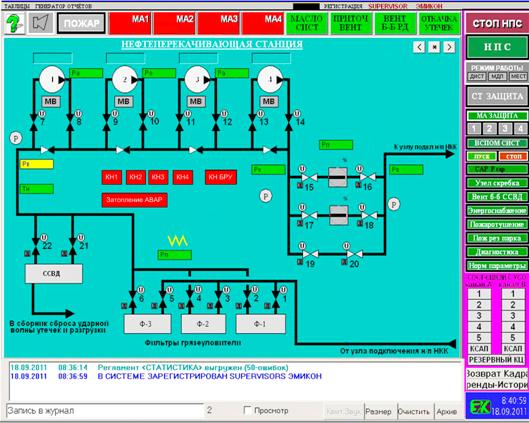
Рисунок 4.1 - Мнемокадр технологической схемы
НПС
В автоматическом основном, резервном или
дистанционном режимах агрегат считается включенным после полного завершения
программы пуска, то есть при включенном двигателе и полностью открытых
агрегатных задвижках. В кнопочном режиме состояние агрегата контролируется
только по состоянию двигателя. В испытательном режиме флаг состояния двигателя
устанавливается программно при поступлении соответствующих команд управления
двигателем.
У отключенного МНА непрерывно контролируется ряд
параметров и условий, определяющих его готовность к запуску. К таким условиям
относятся:
отсутствие станционных и агрегатных защит;
готовность к пуску электродвигателя;
готовность агрегатных задвижек;
нормальные значения технологических параметров
агрегата;
готовность технологической схемы (вход и выход
НПС).
Управление МНА.
Управление МНА может осуществляться:
от команды оператора МДП в программном или
кнопочном режиме;
автоматически - включение из резерва, отключение
собственными защитами, отключение станционными защитами.
Для МНА предусмотрены следующие режимы
управления:
программный из МДП;
автоматический резервный;
кнопочный;
ремонтный;
испытательный.
Дистанционный режим управления предполагает
управление насосным агрегатом (включая задвижки) по команде оператора из РДП
или МДП в соответствии с выбранной программой пуска.
Программный режим управления предполагает
управление насосным агрегатом по команде оператора из МДП в соответствии с
программой пуска.
Автоматический резервный режим управления
предполагает запуск агрегата при отключении соседнего агрегата собственными
защитами. В том случае, если в момент срабатывания защиты соседний агрегат
находился в процессе пуска, но двигатель еще не был включен, резервирование не
производится.
Кнопочный режим управления означает, что по
командам пуска и останова агрегата может управляться только электродвигатель
МНА. Открытие и закрытие агрегатных задвижек производится по командам
управления данными задвижками. Для кнопочного режима выбор программы пуска не
имеет значения. Последовательность действий при пуске и остановке насосного
агрегата в кнопочном режиме должна определяться оператором.
Ремонтный режим устанавливается при выводе
неработающего агрегата в ремонт. Для МНА, находящегося в этом режиме
управления, открытие, закрытие агрегатных задвижек и управление высоковольтным
выключателем МНА полностью блокируются. После включения агрегата из резерва он
автоматически переводится в программный режим.
В испытательном режиме контроллер программно
имитирует работу двигателя, не формируя команд управления высоковольтным
выключателем (ВВ) и приводами задвижек. Изменение состояния двигателя
происходит при поступлении соответствующих команд управления двигателем. Этот
режим также задается из карты режимов агрегата и является дополнительным к
основным режимам МНА. Управление агрегатом производится в соответствие с
основным режимом.
Возможность управления агрегатными задвижками по
командам оператора в программном и дистанционном режимах блокируется.
Несанкционированное закрытие задвижек у работающего агрегата, находящегося в
программном или дистанционном режиме управления, считается агрегатной защитой.
Управление агрегатом в режимах «Программный из
МДП» и «Дистанционный из РДП» производится в соответствии с одной из программ
пуска:
программа пуска № 1 - пуск на открытую выходную
задвижку;
программа пуска № 2 - пуск на закрытую выходную
задвижку;
программа пуска № 3 - пуск на открывающуюся
выходную задвижку.
Программа пуска № 1 предполагает пуск двигателя
при полностью открытых агрегатных задвижках. В том случае, если при подаче
команды «Пуск» агрегатные задвижки находятся не в открытом состоянии, то они
автоматически открываются, после чего включается двигатель.
Программа пуска «на открытую задвижку» является
предпочтительной, так как обеспечивает наименьшие динамические нагрузки в
трубопроводной обвязке агрегата и наименьшие хлопки обратных клапанов,
установленных на обводной линии насосов. Программа применяется, если пусковые
характеристики электродвигателя и схема электроснабжения рассчитаны на
соответствующие пусковые режимы.
Программа пуска № 2 предполагает пуск двигателя
при открытой входной и закрытой выходной задвижках. Для готовности к по данной
программе выходная задвижка должна быть закрыта. При подаче команды «Пуск»
входная задвижка автоматически открывается (если она была не открыта), затем
включается двигатель и после этого автоматически открывается выходная задвижка.
Программа пуска «на закрытую задвижку»
применяется, если установленное электрооборудование не может обеспечить пуск на
открытую задвижку и задвижка имеет привод, мощность которого обеспечивает ее
открытие при перепаде давления, создаваемом насосным агрегатом при закрытой
задвижке.
Программа пуска № 3 предполагает пуск двигателя
при открытой входной и открывающейся выходной задвижках. Для готовности к пуску
по данной программе выходная задвижка должна быть закрыта. При подаче команды
«Пуск» входная задвижка автоматически открывается (если она была не открыта),
затем начинает открываться выходная задвижка. Через выдержку времени после
начала открытия выходной задвижки (установленное значение задается оператором)
включается двигатель.
Программа пуска «на открывающуюся задвижку»
применяется, когда неприемлема программа «на открытую задвижку» и когда
установленные у насоса задвижки имеют привод небольшой мощности и поэтому не
могут быть открыты при перепаде давления, создаваемом насосным агрегатом при
закрытой задвижке.
Программы пуска устанавливаются оператором. При
изменении программы пуска происходит автоматическое предпусковое открытие или
закрытие агрегатных задвижек в соответствии с устанавливаемой программой и
выбранным режимом управления.
При выполнении программного отключения МНА задвижки
приводятся в состояние, соответствующее выбранной программе.
.3 Разработка программы управления МНА
При поступлении команды программного запуска
МНА, предварительно перед выполнением команды системой автоматики агрегата,
должны быть проверены следующие условия готовности к пуску:
режим управления МНА должен быть «автоматический
основной» или «резервный основной»;
должны быть открыты задвижки по маршруту
прохождения нефти через насосную станцию (кроме задвижек МНА);
должны отсутствовать аварийные сигналы
общестанционных автоматических защит, препятствующих запуску агрегата;
для вспомогательных систем должны отсутствовать
аварийные сигналы автоматических защит и их основные технологические параметры
должны быть в норме, также должна присутствовать сигнализация о том, что
вспомогательные системы в работе.
Необходимо предусмотреть при запуске МНА на
время 30 секунд превышение аварийного значения защиты по вибрации до 18 мм/с.
Через 30 секунд аварийное значение защиты по вибрации автоматически должно вернуться
к значению 7,1 мм/с.
Также предусмотреть аварийную защиту по осевому
смещению ротора насоса.
Рассмотрим запуск МНА при открытой задвижке.
Запуск на открытую задвижку выполняется в
следующей последовательности:
открываются входная и выходная задвижки МНА,
находящиеся в режиме управления «автоматический основной» или «автоматический
резервный»;
после полного открытия входной и выходной
задвижек включается электродвигатель МНА.
Системой автоматики должно обеспечиваться
прекращение программы запуска до ее завершения в следующих случаях:
при поступлении команды программного останова;
при остановке агрегата кнопкой по месту;
при срабатывании автоматических защит МНА.
При этом системой должно сигнализироваться и
регистрироваться состояние «незавершенный пуск» с расшифровкой причин.
Автоматическая защита осуществляет остановку
магистральных насосных агрегатов и другие действия, необходимые для локализации
аварийных ситуаций.
Отключение магистрального насосного агрегата
происходит в следующих ситуациях:
при падении давления масла к подшипникам;
при повышении утечек из торцевых уплотнений;
при повышении температуры подшипников и корпуса
насоса;
повышенная вибрация насосного агрегата;
нажатие кнопки «Стоп» на щите управления
агрегата.
При срабатывание любой из вышеперечисленных
защит срабатывает соответствующее электрическое табло и звуковая сигнализация.
Остановка МНА на открытые задвижки выполняется
одновременной подачей сигнала на отключение электропривода МНА и на закрытие
входной и выходной задвижек МНА.
Программное обеспечение.
Система ISaGRAF относится к классу
CASE-инструментов (Computer Aided Software Engineering) - инструментам
компьютерной поддержки разработки программ.
Основные возможности интегрированной системы
ISaGRAF:
- поддержка всех пяти стандартных языков
программирования ПЛК (в соответствии со стандартом МЭК 61131-3), их
библиотечных функций и функциональных блоков. ISaGRAF позволяет «смешивать»
программы/процедуры, написанные на разных языках, а также вставлять кодовые
последовательности из одного языка в коды, написанные на другом языке;
- отладчик ISaGRAF, позволяющий проводить
отладку приложений на имитаторе, а также просматривать состояние программного
кода, переменных проекта, уже во время выполнения прикладной задачи
контроллером. Отладчик предоставляет полный набор возможностей для получения
качественного программного продукта (ISaGRAF - приложения). Среди них можно
выделить следующие:
а) поддержка механизма выполнения программ по
шагам;
б) возможность внесения изменений в код
программы во время работы отладчика;
в) трассировка рабочих переменных;
г) интерактивная модификация значений
переменных;
д) запуск/остановка отдельных программ, входящих
в состав данного проекта;
е) эмуляция сигналов, подаваемых на каналы ввода
(INPUT).
Для написания программ программы выбираем язык
ST, так как он наиболее приемлем как по уровню, так и по синтаксису, и удобен
для реализации сложных алгоритмов и процедур.
Входные и выходные параметры.
Входные параметры:- пуск;- стоп
МНА;-вспомогательные системы включены;- сброс авариной сигнализации;- аварийная
вибрация подшипника при запуске МНА;- аварийная вибрация подшипника МНА;-
аварийное осевое смещение ротора насоса;- отсутствие аварийной вибрации
подшипника при запуске МНА;- отсутствие аварийной вибрации подшипника МНА;-
отсутствие аварийного осевого смещения ротора МНА;- сигнал об открытом
состоянии задвижек на приеме и выкиде НПС;- сигнал об открытом состоянии
задвижки на входе МНА;- сигнал об открытом состоянии задвижки на выходе МНА;-
сигнал о закрытом состоянии задвижки на выходе МНА;- сигнал о закрытом
состоянии задвижки на выходе МНА.
Выходные параметры:- сигнал срабатывания защит;-
сигнализация;- отсутствие аварийных сигналов;- включение привода входной
задвижки МНА на открытие;- включение привода выходной задвижки МНА на
открытие;- включение привода входной задвижки МНА на закрытие;- включение
привода выходной задвижки МНА на закрытие;- включение МНА;- остановка МНА;vis -
отображение выдержки времени до открытия задвижек;secvis - отображение выдержки
времени после запуска МНА;secvis - отображение выдержки времени до срабатывания
защиты по авариной вибрации подшипника при запуске МНА;secvis - отображение
выдержки времени до срабатывания защиты по авариной вибрации подшипника
МНА;secvis - отображение выдержки времени до срабатывания защиты по авариному
осевому смещению ротора МНА.
Таймеры: - выдержка времени до открытия
задвижек;sec - выдержка времени после при запуске МНА;sec - выдержка времени до
срабатывания защиты по авариной вибрации подшипника при запуске МНА;sec -
выдержка времени до срабатывания защиты по авариной вибрации подшипника МНА;sec
- выдержка времени до срабатывания защиты по авариному осевому смещению ротора
МНА.
Граф переходов, построенный согласно алгоритму
управления работой МНА с применением алгоритмов аварийных защит по вибрации и
осевому сдвигу, представлен на рисунке 4.2. Листинг программы представлен в
приложении Б.
 Рисунок 4.2 - Граф переходов
состояний МНА
Рисунок 4.2 - Граф переходов
состояний МНА
Результаты работы программы.
Система программирования ISaGRAF
позволяет осуществить эмуляцию работы контроллера при помощи меню Debug -
Simulate. Для этого необходимо связать входные и выходные переменные с панелями
ввода/вывода (пункт меню Make - I/O Connection) и произвести компиляцию
программы (пункт меню Make - Make application). Результат работы программы для
разных вариантов входных сигналов.
Выход МНА на рабочий режим осуществляется
следующим образом. После выбора программы запуска с пульта управления АРМа
оператора (в данном случае выбираем программу запуска на открытые задвижки).
Для запуска МНА необходимо чтобы присутствовали сигналы об открытых станционных
задвижек приема и выкида (Zns), работающих вспомогательных систем (Yvssys) и
отсутствии аварийных сигналов (InoAvar). После подачи команды пуск (Ypusk)
агрегатные задвижки запускаются на открытие (Uinopen, Uoutopen) одновременно
работает таймер T1 времени открытия задвижек (рисунок 4.3).

Рисунок 4.3 - Подача команды пуск
(Ypusk)
После подачи сигнала с задвижек об
их открытом состоянии (Uinopen, Uoutopen ) запускается агрегат. Одновременно
запускается таймер(T30secvis) времени запуска агрегата (рисунок 4.4).

Рисунок 4.4 - Запуск агрегата
При появлении сигнала о достижении
вибрации аварийного уровня (Yvib18) во время работы таймера (T30sec) сработает
сигнализация (Isignal) и запустится таймер отсчета времени от появления
аварийного сигнала (T2sec). Если таймер отработает при аварийном сигнале, то
произойдет остановка агрегата (USTOP) и закрытие агрегатных задвижек (Uoutopen,
Uinclose) с одновременной подаче сигнала о срабатывании защиты (Izaschita).
Аналогичные действия происходят при появлении аварийных сигналов вибрации и
осевого сдвига в нормальном режиме работы (рисунок 4.5).

Рисунок 4.5 - Срабатывание защиты
МНА
Если во время работы таймера
аварийный сигнал пропадет, то состояние агрегата переходит в исходное
состояние. Также возможна аварийная остановка агрегата в состояниях запуска или
работы подачей команды (YSTOP). В этом случае агрегат останавливается, и его
задвижки идут на закрытие. Возврат агрегата в режим готовности обеспечивает
подача сигналов (Zoutclose, Zinclose). о закрытом состоянии с агрегатных
задвижек и подачей команды сброса аварийного состояния (Ysbros).
5. ОХРАНА ТРУДА И ТЕХНИКА БЕЗОПАСНОСТИ
Темой данного дипломного проекта, как уже отмечено
ранее, является модернизация системы автоматизации нефтеперекачивающей станции
«Субханкулово» нефтепровода НКК.
С целью обеспечения безопасности производства
при монтаже, эксплуатации и ремонте средств автоматизации, в данном разделе
необходимо дать характеристику производственной среды, в которой будет
произведена модернизация системы автоматики, и провести анализ опасных и
вредных производственных факторов.
Правила техники безопасности должны соблюдаться
по всем видам работ, связанных с монтажом, эксплуатацией и ремонтом средств
автоматизации. Нарушение требований правил техники безопасности производства
может привести к авариям и производственным травмам.
Вследствие того, что нефтеперекачивающая
насосная станция является вредным и опасным производственным объектом, в данном
разделе будут рассматриваться мероприятия по безопасной эксплуатации
оборудования и будет произведен анализ безопасной работы средств автоматизации.
.1 Анализ производственных опасностей
В предыдущих разделах дипломного проекта
рассматривалась технологическая схема НПС «Субханкулово» и схема автоматизации
МНА, которая позволяет обеспечить безаварийную работу технологического
оборудования.
Первичные преобразователи, рассматриваемые в
дипломном проекте, устанавливаются в помещении насосного зала, а также
непосредственно на электродвигателях, насосных агрегатах, где в процессе
эксплуатации системы рабочая среда обуславливается наличием вредных и
взрывопожароопасных веществ.
В таблице 5.1 приведен перечень взрыво- и
пожароопасных продуктов, участвующих в производственном процессе, с их
характеристиками.
Таблица 5.1 - Взрывоопасные и токсические
свойства веществ в рассматриваемой производственной среде
|
Наименование
вещества
|
Класс
опасного вещества
|
Температура,
ºС
|
Концентрационный
предел взрываемости, % объем
|
|
|
вспышки
|
самовоспламенения
|
нижний
предел
|
верхний
предел
|
|
Нефть
|
4
|
-18,0
|
233
|
1,1
|
7,4
|
|
Попутный
нефтяной газ
|
4
|
-
|
537
|
6
|
13,5
|
Пары нефти действуют, главным образом, на
центральную нервную систему. Признаки отравления чаще всего проявляются в
головокружении, сухости во рту, головной боли, тошноте, сердцебиении, общей
слабости и потери сознания.
Попутный газ - бесцветная смесь легких
углеводородных паров, обладает вредным воздействием на организм человека и в
зависимости от концентрации может произойти отравление организма разной степени
тяжести.
Пожароопасность технологических процессов в
значительной степени определяется физико-химическими свойствами нефтепродуктов.
Классификация сооружений по НПБ 105-03 и ПУЭ
приведена в таблице 5.2.
Таблица 5.2 - Взрывопожарная и пожарная
опасность, санитарная характеристика производственных зданий
|
Наименование
производственных зданий, помещений, наружных установок
|
Категория
взрывопожароопасной и пожарной опасности зданий и помещений (НПБ 105-03)
|
Классификация
зон внутри и вне помещений
|
|
|
класс
взрывопожароопасной или пожарной зон (ПУЭ и ПБ 08-624-03)
|
категория
и группа взрывопожароопасных смесей (ГОСТ 12.1.011-078) Р51330.5-99,
Р51330.11-99
|
|
Зал
насосной станции НПС
|
А
|
В-1а
|
II-АТЗ
|
|
Операторная
|
Д
|
-
|
-
|
В процессе эксплуатации средств автоматизации
существует опасность поражения электрическим током. Приборы и средства
автоматизации находятся под напряжением 24 В постоянного тока. Удар
электрическим током вызывает рефлекторную реакцию со стороны центральной
нервной системы и ведет к нарушению нормального ритма работы сердца. В
результате наблюдается нарушение или полное прекращение деятельности органов
дыхания и кровообращения.
.2 Мероприятия по обеспечению безопасных и
безвредных условий труда
В данном разделе рассмотрены правила и
требования, которые необходимо соблюдать, чтобы избежать воздействия вредных и
опасных производственных факторов, возникающих при монтаже, эксплуатации и
ремонте системы автоматизации НПС «Субханкулово».
Мероприятия по технике безопасности при
эксплуатации объектов НКК НПС «Субханкулово».
Согласно регламентам и правилам ПТЭ, ПТБ, ПУЭ и
РД 153-39.4-056-00, во избежание несчастных случаев при обслуживании
оборудования, направляемый на работу персонал должен иметь соответствующую
подготовку, пройти производственный инструктаж, ознакомиться с правилами
внутреннего распорядка, общими правилами техники безопасности и должностной
инструкцией на поручаемом ему для обслуживания участке или агрегате, а также с
методами оказания первой помощи.
Для защиты от поражения электрическим током при
монтаже, эксплуатации и ремонте средств автоматизации, согласно ГОСТ
12.1.030-81 (2001) «ССБТ. Электробезопасность. Защитное заземление. Зануление»
предусматриваются следующие мероприятия:
защитное заземление металлических нетоковедущих
частей в сетях до 1000 В. Сопротивление, оказываемое заземляющим устройством R≤4
Ом;
зануление в сетях до 1000 В;
защитное отключение при появлении напряжения на
корпусе оборудования;
предупредительная сигнализация, блокировка,
знаки безопасности; ограждение неизолированных токоведущих частей.
Для предотвращения возникновения зарядов
статического электричества согласно ГОСТ 12,1,018-93 (2001) «ССБТ.
Пожаровзрывобезопасность статического электричества». Общие требования» все
металлические и электропроводные неметаллические части технологического
оборудования должны быть заземлены. Сопротивление защитного устройства от
статического электричества не должно превышать 100 Ом.
Согласно «Инструкции по устройству молниезащиты
зданий и сооружений» РД 34.21.122-87 должна быть выполнена:
защита от вторичных проявлении молнии;
защита от заноса высокого потенциала через
наземные (надземные) и подземные металлические коммуникации.
В качестве молниеприемных устройств использовать
отдельно установленные на сооружениях молниеотводы, молниеприемные сетки, а
также естественные молниеотводы, присоединенные к общему заземляющему
устройству.
Во избежание утечек в насосной НПС
«Субханкулово» важнейшим фактором при перекачке нефти является герметизация
основного насосного оборудования и системы трубопроводов. Герметизация
обеспечена за счет сварного соединения стыковочных мест. Гибкие связи, в
системе технологических трубопроводов, герметизируются при помощи хомутов с
использованием герметика марки МГ-5.
Мероприятия по промышленной санитарии.
К ним относятся требования к спецодежде,
освещению, микроклимату, требования к организации и оборудованию рабочего
места.
Мероприятия по пожарной безопасности.
Пожарная безопасность на электроустановках,
находящихся в помещении НПС соблюдается в соответствии с ППБ 01-03 «Правила
пожарной безопасности в Российской федерации» и ГОСТ 12.1.004-91 (1999) «ССБТ.
Безопасность. Общие требования»:
вспомогательное оборудование, электродвигатели,
аппараты управления должны иметь степень защиты, соответствующее классу зоны, а
также должны иметь аппараты защиты от коротких замыканий и перегрузок;
запрещается использовать электрические аппараты
и приборы в условиях, не соответствующих рекомендациям предприятий
изготовителей или неисправных, создающие угрозу возникновения пожара, а также
электропровода и кабели с поврежденной или потерявшей защитные свойства
изоляцией;
запрещается курить и разводить открытый огонь;
Все первичные приборы контроля и регулирования,
установленные по месту, в зонах возможного возникновения загазованности
предусматривается выполнять в искробезопасном исполнении 2ExiIIАТ2 и 1ExdIIАТЗ,
что позволяет производить измерение во взрывоопасной среде.
Насосная станция оснащена системой
автоматического пожаротушения (АППТ), позволяющей тушить возможные очаги пожара
автоматически.
Вентиляция в насосном зале установлена
приточно-вытяжная кратностью воздухообмена 4:1 для удаления взрывоопасной смеси
воздуха с парами нефти.
Система ЛППТ оборудована резервным питанием, а
на станции пенотушения установлен дизель-генератор на случай отсутствия
электроэнергии.
Система АППТ управляется контроллером сигнальным
автоматического пожаротушения (КСАП), осуществляющий контроль за состоянием насосной
станции. В насосной станции установлены инфракрасные датчики контроля «Ясень».
При возникновении пожара, на объектах охраны контроллер КСАП автоматически
запускает пенный насос и открывает соответствующие задвижки на насосную, сигнал
с контроллера КСАП поступает в пожарное депо, где находятся две дежурные
пожарные машины и пожарный расчет. На каждом из входов (два) в насосную
устанавливаются ручные пожарные извещатели.
.3 Расчет установки пенного тушения и пожарного
водоснабжения
Пожарная безопасность объекта должна
обеспечиваться системами предотвращения пожара и противопожарной защиты, в том
числе организационно-техническими мероприятиями.
Система пожарной автоматики предназначена для:
автоматического обнаружения очага возгорания;
оповещения персонала о пожаре;
приведения в действие системы пенотушения в
автоматическом или ручном режимах, для локализации очага пожара.
Автоматическая система управления пенного
пожаротушения (АСУ ПТ) на НКК НПС «Субханкулово» выполняется на базе
микропроцессорных средств, которая обеспечивает:
непрерывный контроль и управление системами
тушения пожаров в режиме ожидания (до возникновения пожара) и в режиме «Пожар»;
функционирование централизованной или
распределенной автоматизированной системы с возможностью расширения выполняемых
функций без изменения структуры программного обеспечения;
работу системы автоматизации автономно, в
локальной сети и в составе многоуровневой автоматизированной системы
управления.
На объекте НПС «Субханкулово» эксплуатируется
система автоматической установки пожаротушения, в состав которой входит заранее
приготовленный 6% водный раствор пенообразователя, хранящийся в специальных
подземных резервуарах. В период тушения пожара насосами пожаротушения, раствор
подаётся к пеногенераторам.
Система автоматического пенного пожаротушения на
НКК НПС «Субханкулово» в насосных залах предусмотрена на пену высокой
кратности.
На НПС «Субханкулово» для нужд пожаротушения
используется насосная водяного пожаротушения с резервуарами противопожарного
запаса воды объем=2000 м3 (2 шт.) и объем=500 м3.
Пена получается в стационарных пеногенераторах
ГСП-600 при смешении 6% раствора пенообразователя ПО-1 с воздухом. Обладает
незначительной электропроводностью и поэтому применяется для тушения пожаров в
электроустановках, находящихся под напряжением.
Приведем тактико-технические показатели прибора
подачи пены:
ствол и генератор, ГСП-600;
напор у прибора, 60 м;
концентрация раствора, 6%;
расход воды, 5,64 л/с;
расход пенообразователя, 0,36 л/с;
кратность пены, 100;
подача (расход) по пене, 36 м /мин.
Метод тушения - комбинированный, от площади к
объему. Это диктуется наличием трубопроводов на высоте 1,25 м и высотой насоса
1,7 м, поскольку очаг пожара может возникнуть в любой точке по высоте
трубопроводов обвязки и насоса, а остаточное давление в трубах будет
способствовать образованию форсуночного горения, то при расчёте на объёмное
тушение высота принимается равной 1,75 м.
Площадь помещения насосной найдем по формуле
= a·b, (5.1)
где S - площадь помещения, м2;
а - длина насосной, равная 37 м; - ширина
насосной, равная 9 м.= a·b = 37·9 = 335 м2;
Объём помещения, заполняемый пеной, согласно
принятой высоте будет составлять:
п = a·b·h = 37·9·1,75 = 586
м3, (5.2)
где Vп - объём помещения, заполняемый пеной, м3;
- принятая высота, м.
Определим объём, который можно заполнить одним
генератором пены ГСП-600 за расчетное время тушения пожара по формуле

 ,
(5.3)
,
(5.3)
где -
объём, который можно заполнить одним генератором пены ГСП-600 за расчетное
время тушения пожара, равное 15 мин., м3;
 - расход
генератора по пене, м3/мин;
- расход
генератора по пене, м3/мин;
τ - расчетное время
тушения пожара, мин.;
К3 - коэффициент разрушения и потери пены,
равный 3,5;
 3.
3.
Определим требуемое число генераторов пены
ГСП-600 для объёмного тушения пожара в насосной по формуле

 ,
(5.4)
,
(5.4)
где - требуемое количество генераторов пены ГСП-600, шт;
- требуемое количество генераторов пены ГСП-600, шт;
Vп - объём помещения, заполняемый пеной, м3;
 - объём, который
можно заполнить одним генератором пены ГСП-600, м3;
- объём, который
можно заполнить одним генератором пены ГСП-600, м3;
=  шт.
шт.
Требуемый расход пенообразователя и воды, для
создания пены, на один ГСП-600 составляет 0,36 л/с и 5,64 л/с.
Определим по формулам требуемый расход
пенообразователя и воды для четырех ГСП-600:
 =
= • 4) = 0,36·4=1,44 л/с, (5.5)
• 4) = 0,36·4=1,44 л/с, (5.5)
 =
=  •
4) = 5,64 • 4 = 22,56 л/с. (5.6)
•
4) = 5,64 • 4 = 22,56 л/с. (5.6)
Определим по формулам требуемое количество
пенообразователя и воды для четырех ГСП-600 за расчетное время тушения пожара,
которое составляет 15 мин:
 =
• 4) ·τр , (5.7)
=
• 4) ·τр , (5.7)
= •
4) ·τр , (5.8)
где - требуемое количество пенообразователя,
л;
 - расход пенообразователя на один
ГСП-600, л/с;
- расход пенообразователя на один
ГСП-600, л/с;
τр - расчетное время тушения
пожара, с.;
 требуемое количество воды, л;
требуемое количество воды, л;
 расход воды на один ГСП-600, л/с.
расход воды на один ГСП-600, л/с.
=0,36*4*600 = 864, л;
 = 5,64 * 4 * 600 = 13536, л.
= 5,64 * 4 * 600 = 13536, л.
Определим общее количество
пенообразователя, требуемого для тушения пожара с учетом резерва и
обеспеченность объекта водой по формулам
 =
= τр*Кз,
(5.9)
τр*Кз,
(5.9)
 =
= τр *Кз +
τр *Кз + *
*  *3600τз *, (5.10)
*3600τз *, (5.10)
где  требуемое число генераторов пены
ГСП-600, шт;
требуемое число генераторов пены
ГСП-600, шт;
 расход пенообразователя на один
ГСП-600, л/с;
расход пенообразователя на один
ГСП-600, л/с;
τр - расчетное время тушения
пожара, мин.;
К3 - коэффициент запаса огнетушащего
средства, равный 3;
- количество стволов, шт.;
 расход воды из ствола А, л / с;
расход воды из ствола А, л / с;
резервуар с водой, объёмом 1600 м3,
шт;
τз - время, на которое
рассчитан запас огнетушащего средства, ч.;
К3 - коэффициент запаса для воды,
равный 5;
= 4*0,36*60*10*3=3888л = 3,888 м3;
=
4*5,64*60*10*5+2*7,4*3600*1=154800л = 154,8 м3.
Следовательно, объект водой
обеспечен, так как ее количество в резервуарах (1600, 1600 и 500 м3) значительно
превышает общий расход на тушение и охлаждение конструкций.
Расчёт бака-дозатора производится с
учётом троекратного запаса пенообразователя по формуле
 =
= τр*Кз,м3,
(5.11)
τр*Кз,м3,
(5.11)
где - объём бака-дозатора, м3;
расход пенообразователя на один
ГСП-600, м3/мин.;
 - требуемое число генераторов пены
ГСП-600, шт;
- требуемое число генераторов пены
ГСП-600, шт;
τр - расчетное время тушения
пожара, мин.;
К3 - коэффициент запаса огнетушащего
средства, равный 3;
Расчётный объём бака-дозатора
составит:
= 0,36 * 4 * 15 * 3 = 64,8 м3;
Принимаем бак-дозатор объёмом 70 м3.
Диаметр трубопровода для обеспечения
подачи раствора пенообразователя с расходом 1,08 м3/мин. определяется по
таблицам для гидравлического расчета, в зависимости от напора перед
пеногенератором, определяемым по формуле
гп = hвод - hтр - hпс - hуст.ГВП ;
(5.12)
где hгп - напор перед
пеногенератором, м;вод - напор в системе пожарно-производственного водовода, 80
м;тр - потери напора в трубопроводе, м;пс - потери напора на работу
пеносмесителя, м;уст.ГСП - высота установки пеногенераторов, равная 4,2 м.
Потери напора в трубопроводе
определяются по формуле
тр =i · l, (5.13)
где i - гидравлический уклон,
0,0103;-длина расчетного участка, 200 м. тр =0,0103*200 = 2,06, м.
Потери напора на работу
пеносмесителя определяются по формуле
пс = (hвод - hтр) *К3, (5.14)
где К3 - коэффициент, учитывающий
потерю напора на работу пеносмесителя, равный 0,3.= (80 - 2,06) • 0,3 = 23,382
м.
Рассчитаем напор перед
пеногенератором: гп = 80 - 2,06 - 23,382 - 4,2 = 50,358 м.
По результатам расчёта видно, что
напор перед пеногенератором находится в допустимых пределах 40 - 60 м.
Диаметр подходящих и отходящих
трубопроводов принимается равным 150 мм.
Схема станции пенотушения насосного
зала нефтепровода НКК НПС «Субханкулово» представлена на рисунке 5.2.

Рисунок 5.2 - Схема станции
пенотушения насосного зала нефтепровода НКК НПС «Субханкулово»
6. ОЦЕНКА ЭКОНОМИЧЕСКОЙ ЭФФЕКТИВНОСТИ ПРОЕКТА
ВНЕДРЕНИЯ СИСТЕМЫ ВИБРОКОНТРОЛЯ МАГИСТРАЛЬНОГО НАСОСНОГО АГРЕГАТА
.1 Экономическая характеристика ОАО
«Уралсибнефтепровод»
автоматизация виброконтроль
магистральный насосный
Открытое акционерное общество «Урало-Сибирские
магистральные нефтепроводы имени Д.А. Черняева» - дочернее акционерное общество
ОАО «АК «Транснефть» - зарегистрировано постановлением главы администрации
Советского района г. Уфы РБ № 2151 от 16.08.1995 г. и является правопреемником
ПО «Урало-Сибирское управление магистральных нефтепроводов», которое было
образовано 3 сентября 1947 года.
Туймазинское нефтепроводное управление (ТНУ)
создано на основании приказа ОАО «Уралсибнефтепровод» № 123 от 15 июля 1999
года. ТНУ является правопреемником Туймазинского районного нефтепроводного
управления ОАО «Уралсибнефтепровод», не является юридическим лицом и входит на
правах обособленного структурного подразделения (филиала) в состав ОАО
«Урало-сибирские магистральные нефтепроводы имени Д.А. Черняева». ТНУ имеет
отдельный (незаконченный) баланс, печать и штамп со своим наименованием,
расчетный счет в банке. ТНУ в своей деятельности руководствуется
законодательством РФ, РБ, Уставом ОАО и положением о ТНУ.
Основные виды деятельности общества:
транспортировка по магистральным нефтепроводам
нефти, газа и продуктов их переработки;
хранение и реализация нефти, газа и продуктов их
переработки;
эксплуатация и капитальный ремонт магистральных
трубопроводов;
изготовление, обслуживание, ремонт, наладка и
испытание оборудования магистральных нефтепроводов.
.2 Краткая характеристика объекта исследования
Как уже отмечалось ранее, в данном дипломном
проекте рассматривается автоматизация магистрального насосного агрегата на НПС
«Субханкулово», которая является структурным подразделением ОАО
«Уралсибнефтепровод».
Объем автоматизации МНА предусматривает
автоматический контроль наиболее ответственных параметров и защиту агрегата при
их отклонении от допустимых значений. Одними из таких параметров являются уровни
вибрации насоса и двигателя МНА, контроль за которыми позволяет своевременно
установить нарушения в работе агрегата, вызванные появлением дисбаланса,
виброскоростью, виброускорением, износом подшипников.
Система виброконтроля «Аргус-М» предназначена для
постоянного измерения, передачи значений параметров вибрации насоса и двигателя
и выдачи сигнала на отключение МНА при аварийном значении.
Применение системы виброконтроля позволяет:
повысить быстродействие срабатывания системы и
обеспечить своевременную передачу сигнала об отклонениях на средний и верхний
уровень АСУ ТП, что предотвращает аварии на НПС;
повысить надежность работы и срок службы
технологического оборудования, благодаря отсутствию преждевременного износа;
обеспечить безопасную работу МНА без постоянного
присутствия обслуживающего персона непосредственно в насосной;
снизить эксплуатационные затраты и расходы на
электроэнергию.
6.3 Методика расчета экономической
эффективности проекта
Под экономической эффективностью понимается
относительная величина, получаемая в результате сопоставления экономического
эффекта с затратами, вызвавшими этот эффект.
Для оценки эффективности инвестиционных проектов
применяются методы дисконтированной оценки, которые базируются на учете
временного фактора. Они учитывают временной фактор с позиции стоимости денег в
будущем.
Расходы и доходы, распределенные по времени,
приводятся к единому моменту времени - расчетному или базовому моменту.
Расчетным или базовым моментом считается дата начала реализации объекта или
начало производства продукции.
Процедура приведения разновременных доходов и
расходов к базовой дате называется дисконтированием.
Одним из показателей экономической эффективности
является чистый дисконтный доход (ЧДД), который определяется как сумма текущих
эффектов за весь расчетный период. Проект считается прибыльным и его следует
принять, если чистый дисконтный доход (ЧДД) больше нуля.
На практике часто пользуются
следующей формулой для определения ЧДД:
|
 , (6.1) , (6.1)
|
|
где t - год расчетного периода;
N - плановый срок обновления системы, лет;
ЧД - чистый доход в году t, руб.;
αt - коэффициент
дисконтирования.
В качестве начального года расчетного периода
принимается год начала финансирования работ по осуществлению мероприятия,
включая проведение научных исследований. Конечный год tN расчетного периода
определяется моментом завершения установленного жизненного цикла проектируемой
системы, зависящий от планового срока обновления средств автоматизации по
условиям их использования или срока службы (с учетом морального старения).
Приведение разновременных затрат и результатов
всех лет периода реализации мероприятия к расчетному году осуществляется путем
умножения их величины за каждый год на коэффициент дисконтирования,
рассчитываемый по формуле
|
 , (6.2) , (6.2)
|
|
где r - величина ставки дисконта, r =10%.
Важным фактором, влияющим на оценку
эффективности проекта, является ставка дисконта. Величина ставки дисконта
обычно применяется на уровне ссудного процента. Чем меньше ставка, тем
эффективность проекта больше.
Для определения величины чистого дохода,
приходящегося на рубль капиталовложений, используется индекс доходности (ИД),
который определяется отношением суммы дисконтированных эффектов к сумме
дисконтированных капитальных вложений:
|
 ,(6.3) ,(6.3)
|
|
где К - капитальные вложения, руб.
Срок окупаемости с учетом дисконтирования (Ток)
- продолжительность периода от начального момента до момента окупаемости,
расчет которого проводится графически или по формуле
|
 . (6.4) . (6.4)
|
|
Внутренней нормой доходности (ВНД)
называется такое положительное число  , что при норме дисконта
, что при норме дисконта  ЧДД проекта
обращается в нуль, при всех больших значениях
ЧДД проекта
обращается в нуль, при всех больших значениях  - ЧДД отрицателен, при всех меньших
значениях - ЧДД положителен. ВНД определяется графическим методом по
зависимости накопленного ЧДД от ставки дисконтирования r.
- ЧДД отрицателен, при всех меньших
значениях - ЧДД положителен. ВНД определяется графическим методом по
зависимости накопленного ЧДД от ставки дисконтирования r.
ВНД показывает максимальную ставку
платы за инвестиции, при которой они остаются безубыточными.
.4 Расчет экономической
эффективности проекта
К единовременным вложениям относятся
затраты на разработку, приобретение, монтаж и наладку приборов и оборудования.
Затраты по капитальным вложениям в
систему виброконтроля агрегатов «Аргус-М» сведены в таблицу 6.1.
Таблица 6.1 - Определение
капитальных вложений в систему виброконтроля насосных агрегатов «Аргус-М»
|
Наименование
видов затрат
|
Затраты,
руб.
|
|
Предпроектные
исследования
|
5
354,02
|
|
Разработка
рабочего проекта
|
9
775,65
|
|
Затраты
на экспертизу, авторский надзор
|
5
125,54
|
|
Стоимость
оборудования (прибор контроля вибрации «Аргус-М»)
|
838
224,6
|
|
Строительно-монтажные
работы
|
10
937,75
|
|
Пуско-наладочные
работы
|
12
534,44
|
|
Итого:
|
881
952
|
|
НДС
(18%)
|
158
751,36
|
|
Всего
с НДС
|
1
040 703,36
|
Эксплуатационные затраты рассчитываются по
формуле
|
 (6.5) (6.5)
|
|
где З - эксплуатационные затраты на систему,
руб.;
Зот - затраты на заработную плату, тыс. руб.;
ТР - затраты на текущий ремонт, тыс. руб.;
ЗЭЛ - затраты на электроэнергию, руб.;
А - амортизационные отчисления, руб.
Затраты на оплату труда персонала,
обслуживающего технические средства, определяется по формуле
|
 (6.6) (6.6)
|
|
где ЗП - заработная плата на одного человека,
руб.;
n - число рабочих, человек;
t - время, число месяцев;
kр - районный коэффициент, Кр =15%;
kесн - единый социальный налог, kр = 34,5%.
МНА и входящую в АСУ ТП систему вибрации
насосного агрегата непосредственно обслуживают два слесаря КИП и А с окладом 4
876 рублей, один инженер с окладом 5 632 рублей.
Для того чтобы система была эффективной, затраты
на текущий ремонт должны составлять не более 10% от капитальных вложений.
Внедряемая система имеет высокую степень надежности.
Величина амортизационных отчислений:
|
 (6.7) (6.7)
|
|
где NA - норма амортизационных отчислений,
%;
К - капитальные вложения, тыс. руб.
Норма амортизационных отчислений NA = 10% с
учетом планового срока обновления системы 10 лет.
Результаты расчета эксплуатационных затрат
приведены в таблице 6.2.
Таблица 6.2 - Расчет эксплуатационных затрат по
системе виброконтроля
|
Наименование
|
Стоимость,
тыс. руб.
|
|
Затраты
на заработную плату
|
285,55
|
|
Затраты
на текущий ремонт
|
101,55
|
|
Затраты
на электроэнергию
|
77,68
|
|
Амортизационные
отчисления
|
104,07
|
|
Итого:
|
568,85
|
Внедрение системы виброконтроля дает ряд
преимуществ:
уменьшилось число аварий и сократилось время
простоев;
повысилась надежность работы МНА за счет
отсутствия преждевременного износа оборудования;
снизилась трудоемкость работ по эксплуатации
оборудования, сбору, обработке и передаче информации;
сократилась численность обслуживающего
персонала.
Экономия от использования системы виброконтроля
дана в таблице 6.3.
Таблица 6.3 - Расчет выгод от реализации системы
виброконтроля
|
Наименование
|
Стоимость,
тыс. руб.
|
|
Экономия
на заработной плате
|
489,34
|
|
Экономия
на ремонте оборудования
|
57,89
|
|
Экономия
на электроэнергии
|
56,65
|
|
Экономия
за счет рационального режима работы
|
138,34
|
|
Итого:
|
742,22
|
Прибыль от проекта определяется по формуле:
|
 ,(6.8) ,(6.8)
|
|
где  - прибыль в году t;
- прибыль в году t;
В - выгоды от реализации проекта,
тыс. руб.;
З - текущие затраты без учета
амортизации, тыс. руб.;
А - амортизационные отчисления, тыс.
руб.;
Нимt - налог на имущество в году t,
тыс. руб.,
|
 , (6.9) , (6.9)
|
|
где Ко - остаточная стоимость имущества,
тыс. руб.;
Ним - ставка налога на имущество, Ним =
2,2 %.
|
Чистая
прибыль равна прибыли от реализации проекта:  , (6.10) , (6.10)
|
|
где Нпр t - налог на прибыль в
году t, тыс. руб.
|
 , (6.11) , (6.11)
|
|
где Нпр - ставка налога на прибыль, Нпр = 20 %.
Чистый дисконтированный доход и коэффициент
дисконтирования определяем по формулам (6.1) и (6.2).
В результате расчетов получаем, что ЧДД > 0,
следовательно, применение системы виброконтроля «Аргус-М» целесообразно с
экономической точки зрения.
На рисунке 6.1 изображены потоки денежных
средств.

- ЧДД; 2 - НЧДД
Рисунок 6.1 - Изменение денежных
потоков для системы виброконтроля
Индекс доходности, рассчитанный по
формуле (6.3), составляет 1,34.
Срок окупаемости проекта определяем
по графику (рисунок 6.2) для анализа эффективности единовременных затрат на
разработку и внедрение. Он составляет примерно 6 лет и 6 месяцев.

Рисунок 6.2 - Срок окупаемости
системы виброконтроля
Для определения ВНД строим кривую
зависимости ЧДД от нормы дисконта. Результаты вычислений сведены в таблицу 6.4,
по которой построен график 6.3.
Таблица 6.4 - Расчет ЧДД и НЧДД для
определения ВНД системы виброконтроля МНА
|
Год
|
ЧД,
тыс. руб.
|
Норма
дисконта, r
|
|
|
0,1
|
0,2
|
0,3
|
|
0
|
-1040,70
|
-1040,70
|
-1040,70
|
-1040,70
|
|
1
|
220,17
|
200,35
|
183,48
|
169,36
|
|
2
|
221,91
|
184,19
|
154,10
|
131,31
|
|
3
|
223,65
|
167,74
|
129,42
|
101,80
|
|
4
|
225,4
|
153,27
|
108,70
|
78,92
|
|
5
|
227,13
|
140,82
|
91,28
|
61,17
|
|
6
|
228,87
|
128,17
|
76,65
|
47,42
|
|
7
|
230,61
|
117,61
|
64,36
|
36,75
|
|
8
|
232,36
|
109,21
|
54,04
|
28,48
|
|
9
|
234,09
|
98,32
|
45,37
|
22,07
|
|
10
|
235,83
|
91,97
|
38,09
|
17,11
|
|
ЧДД,
тыс. руб.
|
350,95
|
-95,2128
|
-346,307
|

Рисунок 6.3 - Определение внутренней нормы
доходности системы
виброконтроля
Пересечение кривой ЧДД с нулевой линией - около
17,5% - есть ВНД.
Показатели экономической эффективности проекта
внедрения системы виброконтроля насосного агрегата приведены в таблице 6.5.
Результаты свидетельствуют о достаточно высокой экономической эффективности
проекта, что подтверждает прибыльность внедрения данной системы автоматизации.
|
Таблица
6.5 - Показатели эффективности проекта внедрения системы виброконтроля МНА
|
Год
|
10
|
-
|
742,22
|
568,85
|
104,07
|
0
|
173,37
|
41,61
|
131,76
|
235,83
|
0,39
|
91,97
|
350,95
|
350,95
|
6,56
|
17,5
|
1,34
|
|
|
9
|
742,22
|
568,85
|
104,07
|
2,29
|
171,08
|
41,06
|
130,02
|
234,09
|
0,42
|
98,32
|
258,98
|
|
|
|
|
|
|
8
|
-
|
742,22
|
568,85
|
104,07
|
4,58
|
168,79
|
40,5
|
128,29
|
232,36
|
0,47
|
109,21
|
160,66
|
|
|
|
|
|
|
7
|
-
|
742,22
|
568,85
|
104,07
|
6,87
|
166,5
|
39,96
|
126,54
|
230,61
|
0,51
|
117,61
|
51,45
|
|
|
|
|
|
|
6
|
-
|
742,22
|
568,85
|
104,07
|
9,16
|
164,21
|
39,41
|
124,8
|
228,87
|
0,56
|
128,17
|
-66,16
|
|
|
|
|
|
|
5
|
-
|
742,22
|
568,85
|
104,07
|
11,45
|
161,92
|
38,86
|
123,06
|
227,13
|
0,62
|
140,82
|
-194,3
|
|
|
|
|
|
|
4
|
-
|
742,22
|
568,85
|
104,07
|
13,73
|
159,64
|
38,31
|
121,33
|
225,4
|
0,68
|
153,27
|
-335,2
|
|
|
|
|
|
|
3
|
-
|
742,22
|
568,85
|
104,07
|
16,03
|
157,34
|
37,76
|
119,58
|
223,65
|
0,75
|
167,74
|
-488,4
|
|
|
|
|
|
|
2
|
-
|
742,22
|
568,85
|
104,07
|
18,32
|
155,05
|
37,21
|
117,84
|
221,91
|
0,83
|
184,19
|
-656,2
|
|
|
|
|
|
|
1
|
-
|
742,22
|
568,85
|
104,07
|
20,61
|
152,76
|
36,66
|
116,1
|
220,17
|
0,91
|
200,35
|
-840,4
|
|
|
|
|
|
|
0
|
1040,7
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-1041
|
1
|
-1041
|
-1041
|
|
|
|
|
|
Обозначение
|
К
|
В
|
З
|
А
|
НИМ
|
П
|
НПР
|
ЧП
|
ЧД
|
|
ЧДД
|
НЧДД
|
ЧДД
|
СО
|
ВНД
|
ИД
|
|
Показатель
|
Капитальные
вложения, тыс. руб.
|
Выгоды,
тыс. руб.
|
Текущие
затраты в т.ч.
|
Амортизация,
тыс. руб.
|
Налог
на имущество, тыс. руб.
|
Прибыль,
тыс. руб.
|
Налог
на прибыль, тыс. руб.
|
Чистая
прибыль, тыс. руб.
|
Чистый
доход, тыс. руб.
|
Коэффициент
дисконтирования
|
Чистый
дисконтированный доход, тыс. руб.
|
Накопленный
ЧДД, тыс. руб.
|
ЧДД
проекта, тыс. руб.
|
Срок
окупаемости, лет
|
Внутренняя
норма доходности, %
|
Индекс
доходности
|
ЗАКЛЮЧЕНИЕ
В данном дипломном проекте была рассмотрена
система автоматизации магистральной насосной НПС «Субханкулово».
Приведенное в первом разделе технологическое
описание НПС дает полное представление об особенностях работы НПС, работы МНА,
контролируемых параметров.
Анализ существующей системы автоматизации НПС
«Субханкулово» показал, что система автоматизации не соответствует требованиям
нормативно - технической документации ОАО «Транснефть».
Мной предложена модернизация микропроцессорной
системы автоматизации НПС с применением современных контроллеров DCS 2000 с
усовершенствованными средствами самодиагностики и более быстрым временем
срабатывания, позволяющей контролировать работоспособность модулей во время
работы, что позволиет предотвращать фатальные неисправности СА
Была предложена модернизация существующей
системы вибромониторинга и в связи с появлением дополнительных сигналов
доработка программного обеспечения системы автоматики НПС «Субханкулово».
Проведённый экономический анализ свидетельствует
о том, что модернизация системы автоматики НПС позволит также увеличить ресурс
работы средств автоматики и основного оборудования за счет непрерывного
измерения, контроля, анализа параметров вибрации и механического состояния
магистральных насосных агрегатов.
Анализ безопасности свидетельствует о снижении
вероятности возникновения аварийных ситуаций на НПС в результате применения
более совершенных средств автоматизации.
Разработанная усовершенствованная система
автоматики НПС должна являться неотъемлемой частью распределенной системы
управления, которую необходимо внедрять и на других НПС ОАО «Транснефть».
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
Хазиахметов
Ш.Н., Егошина Т.Ю. ОАО «Урало-сибирские магистральные нефтепроводы имени Д.А.
Черняева». Страницы истории - Уфа: «Слово», 1998. Стр. 28,29,104-109.
Трубопроводный
транспорт нефти /Г.Г. Васильев, Г.Е. Коробков, А.А. Коршак и др.; Под редакцией
С.М. Вайнштока: Учеб. для вузов: В 2т. - М.: ООО «Недра-Бизнесцентр», 2002. -
Т. 1. - 407 с.
Мастобаев
Б. Н., Руфанова И.М. Эксплуатация насосных станций: Учеб. пособие. - Уфа:
Издательство УГНТУ, 2000. - 135 с.
Прахова
М.Ю. Автоматизация производственных процессов в трубопроводном транспорте:
Учеб. пособие: В 3 ч. - Уфа: Издательство УГНТУ, 2002. - Ч.3. Автоматизация
некоторых объектов транспорта нефти. - 304 с.
5
Алексеев А.А. Системы автоматизации нефтеперекачивающих станций на базе
микропроцессорных контроллеров с открытой внутренней архитектурой
<http://www.emicon.ru/files/pasu_05-2002.zip>// Промышленные АСУ и
контроллеры.-2002.- № 5.
РД-35.240.00-КТН-207-08
Автоматизация и телемеханизация магистральных нефтепроводов основные положения.
- М.: ОАО «АК «Транснефть» 2008.- 153с.
АЛГВ.421459.05
РЭ. Система автоматизации НПС «Субханкулово-НКК». Руководство по эксплуатации.
- М.: ЗАО «Эмикон», 2002. - 52 с.
АЛГВ.426469.042
РЭ. Модуль центрального процессорного устройства CPU-32A. Руководство по
эксплуатации. - М.: ЗАО «Эмикон», 2012. - 23 с.
АЛГВ.426459.035
РЭ. Модуль интерфейсный CI-31A. Руководство по эксплуатации. - М.: ЗАО
«Эмикон», 2011. - 16 с.
АЛГВ.420609.014
РЭ. Модули серии DCS 2000 взрывозащищенные. Руководство по эксплуатации. - М.:
ЗАО «Эмикон», 2008. - 86 с.
Кибрик
Г.Е. Вибропреобразователи для систем контроля промышленного оборудования //
Вибрация машин: измерение, снижение, защита. - 2010. - № 1. - С. 42-46
Еремин
И.В. Оптимальная защита динамического оборудования системами контроля вибрации
и температуры // Химическая техника. - 2010. - № 3. - С. 17-19
4277-030-00205435-01
РЭ. Прибор для измерения и контроля вибрации «Каскад». - М.: ЗАО «Виконт», 2006
. - 40 с.
Прибор
контроля вибрации «Аргус-М»: руководство по эксплуатации. Пермь: ООО НПП «ТИК»,
2005
ПРИЛОЖЕНИЕ А
(обязательное)
Перечень демонстрационных листов
Технологическая схема НПС «Субханкулово» (копия
рисунка1.1)
Структурная схема автоматизации НПС (копия
рисунка 3.1)
Организация каналов ввода-вывода (копия рисунка
3.4)
Функциональная схема автоматизации МНА
Варианты построения систем виброконтроля (копия
рисунка 3-10)
Каналы измерения вибрации и осевого сдвига
«Каскад»
Каналы измерения вибрации и осевого сдвига
«Аргус-М» (копия рисунка 3-15)
Канал измерения вибрации «СВКА-12» (копия
рисунка 3-16)
Сравнительная таблица характеристик систем
виброконтроля «Каскад», «СВКА-12» и «Аргус-М» (копия таблицы 3.8)
Мнемокадр технологической схемы НПС (копия
рисунка 4.1)
Граф переходов состояний МНА (копия рисунка 4.2)
ПРИЛОЖЕНИЕ Б
(справочное)
Листинг программы управления МНА на языке ST
case state_VIBRo of
: USTOP:= TRUE ;:= FALSE;:= FALSE;:=
FALSE;:= FALSE;:= FALSE;:= TRUE ;:= FALSE ;:= FALSE
;:=t#0s;sec:=t#0s;sec:=t#0s;sec:=t#0s;sec:=t#0s;((Yvssys=TRUE ) AND
(Ypusk=TRUE)AND (Zns=TRUE )) then state_VIBRo:=1; end_if;YSTOP then
state_VIBRo:=8; end_if;
: USTOP:= FALSE;:= TRUE ;:= TRUE ;:=
FALSE;:= FALSE;:= FALSE;sec:=t#0s;(T1);_VIBRo:=11;
: if ((Zinopen=TRUE ) AND (Zoutopen
=TRUE)) then state_VIBRo:=2; end_if;YSTOP then state_VIBRo:=8; end_if;
: Uinopen:= FALSE;:= FALSE;:= TRUE
;(T1);(T2sec);(T30sec);_VIBRo:=21;
: if T30sec>t#30s then
state_VIBRo:=3; end_if;Yvib18 then state_VIBRo:=4; end_if;YSTOP then
state_VIBRo:=8; end_if;
: UonMNA:= TRUE;:= TRUE ;:= FALSE
;(T30sec);(T2sec);(T5sec);(T1sec);
if Yvib71 then state_VIBRo:=5;
end_if;
if Ysd1 then state_VIBRo:=6;
end_if;YSTOP then state_VIBRo:=8; end_if;
: UonMNA:= TRUE ;:= TRUE ;:= FALSE
;sec:=t#0s;(T2sec);_VIBRo:=41;
: if T2sec>t#2s then state_VIBRo:=7;
end_if;Ynovib18 then state_VIBRo:=2; end_if;YSTOP then state_VIBRo:=8; end_if;
:UonMNA:= TRUE ;:= TRUE ;:= FALSE
;sec:=t#0s;(T5sec);_VIBRo:=51;
: if T5sec>t#5s then
state_VIBRo:=7; end_if;Ynovib71 then state_VIBRo:=3; end_if;YSTOP then
state_VIBRo:=8; end_if;
:UonMNA:= TRUE ;:= TRUE ;:= FALSE
;sec:=t#0s;(T1sec);_VIBRo:=61;
: if T1sec>t#1s then
state_VIBRo:=7; end_if;Ynosd1 then state_VIBRo:=3; end_if;YSTOP then
state_VIBRo:=8; end_if;
: USTOP:=
TRUE;(T5sec);(T1sec);(T2sec);(T30sec);:= FALSE;:= TRUE;:= TRUE;:= TRUE ;:=
TRUE;((Zinclose=TRUE ) AND (Zoutclose=TRUE)AND (Ysbros =TRUE )) then
state_VIBRo:=0; end_if;
:
TSTOP(T1);(T5sec);(T1sec);(T2sec);(T30sec);:= FALSE;:= FALSE;:= FALSE;:=
TRUE;:= TRUE;:= TRUE ;((Zinclose=TRUE ) AND (Zoutclose=TRUE)) then state_VIBRo:=0;
end_if;
end_case;