Система автоматического регулирования давления в химическом реакторе
Система автоматического регулирования давления в химическом
реакторе
Введение
автоматический управление химический
реактор
Основной целью курсовой работы
является приобретение навыков и умений построения математической модели
конкретной системы автоматического регулирования, заданной в виде
принципиальной схемы.
Первоначальное исследование заданной
САР начинается с выделения общих функциональных элементов системы и нахождения
задающего и возмущающих воздействий, а также управляемой величины (раздел «1»).
Дальнейшим направлением при
исследовании САР, является построение сигнального графа (после того, как
выделены все его вершины и обозначены их размерности). Сигнальный граф
отображает зависимость какой-либо внутренней вершины от величин, чьи ребра
ведут в данную (раздел «2»).
После построения сигнального графа,
можно перейти к составлению математической модели данной САР в виде системы
дифференциальных уравнений, последующей линеаризации исходной системы и
переходу к операторной форме записи каждого уравнения в системе (раздел «3»).
Непосредственной составляющей построения математической модели является
составление взвешенного графа и структурной схемы данной САР. Иными словами,
взвешенный граф и структурная схема - два эквивалентных представления
линеаризованной системы дифференциальных уравнений, представленных в
операторной форме.
Завершающим этапом исследования
заданной САР, является нахождение главного оператора и контурной передаточной
функции САР посредством правил преобразования структурных схем (раздел «4»).
Кроме структурной схемы, можно использовать и взвешенный граф, однако в этом
случае необходимо пользоваться формулой Мейсона, вычисления по которой для
сложных схем являются довольно трудоемкими.
В разделе «Заключение» приводятся
дальнейшие направления в исследовании данной САР давления в химическом
реакторе, например, определение по контурной передаточной функции свойства
устойчивости системы и т.д.
В разделе «Список использованных
источников» приводится алфавитный перечень литературы, использованной при
проведении исследования САР давления в химическом реакторе.
1. Принцип действия
исследуемой САР давления в химическом реакторе
Схема исследуемой САР давления в
химическом реакторе представлена на рис. 1.
Рисунок 1. Схема САР
давления в химическом реакторе
Управляемой величиной в
данной САР (рис. 1) является давление в химическом реакторе, регулируемое с
помощью задвижки на трубопроводе (Р - регулируемая величина, Р [Н/м2]).
Основными функциональными
элементами являются: камера химического реактора (в которой регулируется
давление) - 6; сильфон (измерение давление в камере) - 7; мост сопротивлений -
1; электронный усилитель(ЭУ) - 2; электромашинный усилитель(ЭМУ) - 3 и
приводной электродвигатель; электродвигатель(ЭДВ) - 4; задвижка - 5.
Построим общую
функциональную схему САР (рис. 2).
Рисунок 2. Функциональная схема САР
Рассмотрим детально каждый
структурный элемент на рис. 2 применительно к САР давления в химическом
реакторе:
) Объект управления(ОУ) - камера
химического реактора. Управляемая величина - выходной сигнал ОУ,
характеризующий его реакцию на значения управляющего воздействия, являющегося
входным сигналом и вырабатываемого системой управления. Управляемой величиной
является давление в камере химического реактора. Управляющее воздействие - S0 - активная площадь крановой задвижки на трубопроводе.
) Измерительное устройство(ИЗУ) -
сильфон, соединенный ручкой с потенциометром. Предназначено для действительного
значения управляемой величины. ИЗУ - преобразователь управляемой величины, в
величину, вообще говоря, иной физической природы, удобной для реального
использования. Выходным сигналом измерителя является величина отклонения
ползунка нижнего потенциометра.
) Задающее устройство(ЗУ) -
предназначено для установления необходимого значения управляемой величины.
Усилие, необходимое для установки данного значения весьма мало. На схеме САР,
таким устройством является верхний потенциометр (верхняя часть моста 1).
) Сравнивающее устройство(СУ) -
предназначено для сопоставления значения управляемой величины с ее заданным
значением, и, следовательно выявления отклонения управляемой величины от
заданного значения (обычно вычитание 2-х величин). В схеме СУ является мост
сопротивлений, сигналом ошибки(рассогласования) является величина напряжения U [В] - разбаланс моста.
) Усилительное устройство(УУ) -
предназначено для усиления мощности сигналов ошибки(рассогласования). Оно
управляет энергией, поступаемой от постороннего источника. В схеме: электронный
усилитель ЭУ(2). Входным сигналом для усилителя является сигнал
рассогласования.
) Исполнительное устройство(ИУ) -
предназначено для воздействия на управляющий орган объекта управления (задвижку
на трубопроводе). В схеме, таким функциональным элементом является
электродвигатель - ЭДВ(4) с крановой задвижкой(5).
) Корректирующее устройство(КУ) -
применяется для изменения свойств САУ в нужном направлении (позволяет устранить
неустойчивость системы). КУ образует внутренние связи в системе. Как таковой
функциональный элемент, КУ в схеме отсутствует.
Основными возмущающими воздействиями
(связывают систему с внешней средой) являются: напряжение на обмотке ЭДВ - Uвд; момент сопротивления на валу ЭДВ - Мс, входное и
выходное давления(Pвх, Pвых).
Рассмотрим поведение системы при
изменении одного из возмущающих воздействий. Пусть, например, увеличилось
давление в реакторе (за счет изменения давления входного потока газа) по
сравнению с заданным (ручкой потенциометра на верхнем сопротивлении моста). Это
возмущающее воздействие немедленно приведет к появлению напряжения на входе
усилителя(U) и его усиления. На выходе усилителя появится выходной ток(Iв1 [А]), который своим электрическим полем создаст электромагнитный
поток, пронизывающий катушку ЭМУ. В электромашинном усилителе, под воздействием
магнитного потока, будет создаваться ток Iа1. Он непосредственно будет влиять на ЭДВ1(заставляя вал
двигателя вращаться), что приведет к изменению положения заслонки (сидящей на
одном валу с двигателем) и активная пропускная площадь в трубопроводе будет
уменьшаться. Это изменение площади приведет к уменьшению потока газа в
трубопроводе и, как следствие, уменьшение давления. По мере уменьшения
давления, нижний потенциометр моста (нижнее сопротивление), придет в положение,
идентичное верхнему потенциометру (в итоге Un1 будет стремиться к нулю) и заслонка перестанет закрываться
(система в некоторый момент времени придет в положение равновесия). При
уменьшении давления в реакторе, произойдет обратный процесс.
Аналогичные процессы будут
происходить при изменении положения ручки верхнего потенциометра (в мосту 1),
т.е. при задании необходимого давления. Сигнал рассогласования будет
воздействовать на усилитель, который посредством ЭМУ и ЭДВ будет воздействовать
на заслонку (5), тем самым уменьшая / увеличивая активную площадь (а
следовательно изменится и давление).
Регулирование будет происходить до
тех пор, пока разница Un1 не станет равной нулю.
Так как в установившемся режиме работы при постоянном задании и отсутствии
возмущений после окончания переходных процессов сигнал ошибки равен нулю Un1 = 0, то система является астатической.
Функциональная схема исследуемой САР
выглядит следующим образом (рис. 3).
Рисунок 3. Функциональная
схема исследуемой САР
2. Построение
сигнального графа САР давления в химическом реакторе
Вид математической модели САР
(системы ее дифференциальных уравнений), зависит прежде всего от того,
совместное изменение во времени каких переменных отражает данная модель и
какова качественная структура взаимосвязи этих переменных. Структуру
взаимосвязи переменных в САР отражает сигнальный граф.
В сигнальном графе роль множества
вершин играют всевозможные сигналы в системе, совместное изменение во времени
которых, описывается данной математической моделью. Ребра сигнального графа,
входящего в некоторую вершину, указывают совокупность значений или изменений во
времени каких сигналов полностью определяют значение или изменение во времени
данного сигнала, соответствующей вершины/4/. Сигнальный граф полностью
определяет структуру дифференциальных уравнений, входящих в математическую
модель. Из всего множества вершин САР, те из них, которые имеют хотя бы по
одному входящему ребру, соответствуют переменным, функции изменения которых во
времени являются решением дифференциального уравнения, а вершины не имеющие не
одного входящего ребра отражают сигналы внешнего воздействия на САР. Число
внутренних вершин равно числу дифференциальных уравнений в системе.
Список сигналов сигнального графа,
являющихся его внешними вершинами:
WЭМУ [рад/с] - угловая скорость вращения ротора ЭМУ;
Uвд [В] - напряжение
возбуждения двигателя ЭДВ;
X1 [м] - перемещение ручки
верхнего потенциометра (задание нужного давления);
Рвх [Н/м2] -
давление потока газа на входе реактора;
Рвых [Н/м2] -
давление потока газа на выходе реактора;
Мс [Н×м] - момент сопротивления на валу ЭДВ;
Список сигналов сигнального графа,
являющихся его внутренними вершинами:
X2 [м] - перемещение ручки
нижнего потенциометра (давление в реакторе);
U1 [В] - напряжение на
верхней части моста(X1);
U2 [В] - напряжение на
верхней части моста(X2);
U [В] - напряжение на входе ЭУ;
Uу [В] - напряжение на
выходе ЭУ;
Iв1 [А] - ток возбуждения
катушки ЭМУ;
Фв1 [Вб] - магнитный
поток в катушке ЭМУ (от Iв1);
Екз [В] -
короткозамкнутая ЭДС в ЭМУ;
Iкз [А] - ток короткого
замыкания в ЭМУ;
Фкз [Вб] - магнитный
поток в обмотке ЭМУ (от Iкз);
Uа1 [В] - напряжение в
выходной цепи ЭМУ;
Iя [А] - ток якоря ЭДВ;
Мд [Н×м] - движущий момент якоря ЭДВ;
Iвд [А] - ток в обмотке
возбуждения двигателя;
Фвд [Вб] - магнитный
поток в обмотке ЭДВ (от Iвд);
Ея [В] - противо-ЭДС
якоря ЭДВ;
Wд [рад/с] - угловая скорость вращения вала ЭДВ;
Xп [м] - перемещение
задвижки в трубе газопровода;
S0 [м2] -
активная площадь в задвижке вентиля;
Gвх [кг/с] - поток газа на
входе реактора;
Gвых [кг/с] - поток газа на
выходе реактора;
P [Н/м2] - давление газа в реакторе;
M [кг] - масса газа в реакторе.
Согласно определенных выше сигналов,
можно построить сигнальный граф САР давления в химическом реакторе (рис. 4).
Общая схема построения графа
следующая: вначале определяется функциональная схема САР, затем возмущающие
воздействия (будут играть роль связи системы с внешней средой), далее переходим
к рассмотрению отдельного функционального элемента схемы (выявляем входные /
выходные сигналы, а также промежуточные для данного элемента системы). Затем
переходим к построению сигнального графа для каждого отдельного функционального
элемента в схеме (а именно: мост сопротивлений, ЭУ, ЭМУ, ЭДВ с задвижкой,
реактор). После составления сигнальных графов для отдельных элементов строим
сигнальный граф для всей САР в целом. Объединение начинается слева направо по
линии перемещения от ЗУ до ОУ, затем построение связей ИЗУ и КУ (если таковой
имеется).
Важно отметить тот факт, что для
типовых стандартных элементов уже имеются свои сигнальные графы (например, ЭМУ,
ЭДВ и т.д.), что облегчает построение и анализ сигнального графа САР.
Полученный в результате граф
является сигнальным графом САР давления в химическом реакторе и определяет
полную структуру дифференциальных уравнений, входящих в систему. В этом графе
число вершин без входящих ребер определяет внешние воздействия, а количество
внутренних переменных есть общее число дифференциальных уравнений системы.
Рисунок 4. Сигнальный
граф САР давления в химическом реакторе
3. Математическая модель
САР давления в химическом реакторе в виде системы линейных дифференциальных
уравнений
.1 Составление исходной
системы уравнений
Как уже указывалось ранее, структура
дифференциальных уравнений САР полностью определяется ее сигнальным графом/1/.
Под структурой системы дифференциальных уравнений понимается, во-первых,
множество функций времени, задаваемых извне; во-вторых, множество искомых
функций времени, относительно которых составляется система; в-третьих, список
дифференциальных уравнений с указанием, какие функции для него являются
заданными, а какие искомыми.
Множество сигналов, задаваемых
извне, полностью определяется множеством вершин графа. Непосредственно вершина
является искомой величиной, а множество входящих в нее ребер графа определяют
сигналы, которые для данной вершины являются заданными. Т.о. общее число
дифференциальных уравнений равно числу внутренних вершин сигнального графа.
Составить дифференциальное уравнение
для заданной внутренней вершины должно определять значение или закон изменения
вершины, если заданы значения или законы изменения вершин, ребра из которых
ведут в данную. При составлении дифференциального уравнения необходимо
понимать, насколько это уравнение отражает реальную связь переменных.
Важно понимать тот факт, что вид
дифференциальных уравнений (и вид сигнального графа) зависят от того, какие
упрощения и идеализации по поводу исследуемой САР приводились.
Для составления дифференциальных
уравнений по сигнальному графу, поступают следующим образом. Вначале составляют
уравнения двигаясь по главной цепочки графа от задающего воздействия до
управляемой величины (учитывая все промежуточные сигналы), после чего
составляют уравнения для цепи обратной связи и корректирующего устройства (если
оно есть в системе)/3/.
Т.о. можно определить следующий вид
дифференциальных уравнений в САР давления в химическом реакторе:
) Напряжение на верхнем
потенциометре моста, зависит от перемещения ручки потенциометра линейно:
U1 = к1×X1, где к1 [В/м].
) Напряжение на входе ЭУ U определяется разностью задающего U1 и измеренного напряжений U2:
U = U1 - U2.
) Напряжение на выходе ЭУ Uу пропорционально напряжению на входе:
Uу = к2×U, где к2 - безразмерный
коэффициент усиления.
) Ток в обмотке возбуждения ЭМУ Iв1, определяется величиной напряжения на выходе ЭУ. В силу того, что
обмотка обладает индуктивностью, эта связь обладает инерционностью и
описывается дифференциальным уравнением:
 ,
,
где к3 -
индуктивность обмотки возбуждения [(В×с)/А],
к4 - ее
активное сопротивление [Ом].
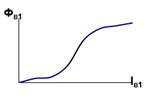
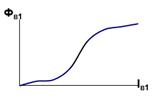
) Поток возбуждения ЭМУ
Фв1 зависит только от мгновенного значения тока в обмотке
возбуждения. Эта связь трудно представить аналитически, намного проще
представить ее с помощью графика намагничивания стали в статоре ЭМУ (рис. 5).
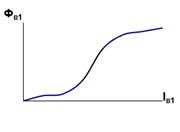
Рисунок 5. График
намагничивания стали в статоре ЭМУ
) Коротко замкнутая ЭДС
на щетках ЭМУ, согласно законам физики, пропорционально зависит от потока
возбуждения и угловой скорости ротора Wэму:
Eкз
= к5×Ф в1×Wэму,
где к5 [(В×с)/(рад×Вб)].
) Ток коротко замкнутой
ЭДС в ЭМУ Iкз, определяется величиной этой ЭДС. В силу того, что обмотка ротора
ЭМУ обладает индуктивностью, эта связь обладает инерционностью и описывается
дифференциальным уравнением:
 ,
,
где к6 -
индуктивность обмотки ротора [(В×с)/А],
к7 - ее
активное сопротивление [Ом].
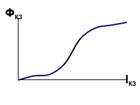
) Поток возбуждения Фкз
зависит только от мгновенного значения тока, его создающего. Эта связь трудно
представить аналитически, намного проще представить ее с помощью графика
намагничивания стали в статоре ЭМУ (рис. 6).

Рисунок 6. График
намагничивания стали в статоре ЭМУ
) Напряжение Uа1, выдаваемое в цепь выхода на щетки ЭМУ, согласно законам физики,
пропорционально зависит от потока возбуждения и угловой скорости ротора Wэму/2/:
Uа1
= к8×Ф кз×Wэму,
где к8 [(В×с)/(рад×Вб)].
) Рабочий ток якоря IЯ, определяемый якорным напряжением Uа1
и противо-ЭДС якоря Eя,
определяется дифференциальным уравнением (за счет индуктивности якоря):
 ,
,
где к9-индуктивность
обмотки якоря [(В×с)/А],
к10 - ее
активное сопротивление [Ом].
) Вращающий момент на
валу двигателя МД определяется мгновенным значением тока якоря и
магнитного потока возбуждения:
МД = к11×IЯ×ФВД,
где к11 - моментная
постоянная якоря двигателя [(Н×м)/(А×Вб)].
) Угловое ускорение вала двигателя
есть производная от угловой скорости его вращения WД. В свою очередь,
угловое ускорение по закону Ньютона пропорционально действующему на него
суммарному моменту (алгебраическая сумма):
 ,
,
где к12 [(Н×м×с2)/рад]
) Ток в обмотке
возбуждения ЭДВ IВД,
определяется величиной напряжения на обмотке UВД.
В силу того, что обмотка обладает индуктивностью, эта связь обладает
инерционностью и описывается дифференциальным уравнением:
к14 - ее
активное сопротивление [Ом].
) Поток возбуждения ЭДВ
ФДВ зависит только от мгновенного значения тока в обмотке
возбуждения. Эта связь трудно представить аналитически, намного проще
представить ее с помощью графика намагничивания стали в статоре ЭДВ (рис. 7).
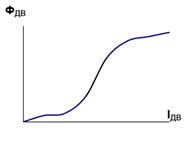
Рисунок 7. График
намагничивания стали в статоре ЭДВ
15) Якорь ЭДВ, вращающийся со
скоростью WД в магнитном потоке возбуждения ФДВ, фактически
представляет собой генератор, вырабатываемый противо-ЭДС ЕЯ:
ЕЯ = к15×ФВД×WД,
где к15 [(В×с)/(рад×Вб)].
) Скорость продольного перемещения
задвижки будет пропорциональна скорости вращения вала ЭДВ:
 ,
,
где к16
[м/рад].
) Активная площадь
вентиля S0, линейно зависит от перемещения задвижки:
S0
= к17×XП,
где к17 [м].
) Поток газа,
поступающий на вход реактора будет зависеть как от активной площади вентиля в
трубопроводе, так и от давления газа на входе и в реакторе:
Gвх
= к18×S0×(Pвх - P),
где к18
[кг/(Н×с)].
) Скорость изменения
массы газа в реакторе, пропорциональна входящему и выходящему потоку:
 .
.
) Давление в реакторе
определяется из уравнения Менделеева-Клайперона:
P
= к19×M,
где к19
[Н/(кг×м2)].
) Поток газа, поступающий
с выхода реактора будет зависеть от давления газа на выходе и в реакторе:
Gвых
= к20×(Pвых - P),
где к20 [кг×м2/(Н×с)].
) Перемещение плеча
нижнего потенциометра(ручки), будет происходить из-за увеличения / сжатия
размеров сильфона(ИЗУ), что описывается уравнением:
X2
= к21×P,
где к21 [м3/Н].
) Напряжение на нижней
части моста (нижнего потенциометра), будет зависеть от перемещения ручки
потенциометра:
U2
= к22×X2,
где к22 [В/м].
Для большей наглядности, систему
дифференциальных уравнений 1-24, представим в виде таблицы 1.
Таблица 1. Система дифференциальных
уравнений исследуемой САР
|
№
|
уравнение(зависимость)
|
размерность коэффициентов
|
|
1
|
U1
= к1×X1
|
к1 [В/м]
|
|
2
|
U
= U1 - U2
|
|
|
3
|
Uу
= к2×U
|
к2 - безразмерный
|
|
4
|
 к3
[(В×с)/А],
к4 [Ом] к3
[(В×с)/А],
к4 [Ом]
|
|
|
5
|
|
|
|
6
|
Eкз
= к5×Ф в1×Wэму
|
к5 [(В×с)/(рад×Вб)]
|
|
7
|
 к6
[(В×с)/А],
к7 [Ом] к6
[(В×с)/А],
к7 [Ом]
|
|
|
8
|
|
|
|
9
|
Uа1
= к8×Ф кз×Wэму
|
к8 [(В×с)/(рад×Вб)]
|
|
10
|
 к9
[(В×с)/А],
к10 [Ом] к9
[(В×с)/А],
к10 [Ом]
|
|
|
11
|
МД = к11×IЯ×ФВД
|
к11 [(Н×м)/(А×Вб)]
|
|
12
|
 к12
[(Н×м×с2)/рад] к12
[(Н×м×с2)/рад]
|
|
|
13
|
 к13
[(В×с)/А],
к14 [Ом] к13
[(В×с)/А],
к14 [Ом]
|
|
|
14
|
|
|
|
15
|
ЕЯ = к15×ФВД×WД
|
к15 [(В×с)/(рад×Вб)]
|
|
16
|
 к16
[м/рад] к16
[м/рад]
|
|
|
17
|
S0
= к17×XП
|
к17 [м]
|
|
18
|
Gвх
= к18×S0×(Pвх - P)
|
к18 [кг/(Н×с)]
|
|
19
|
|
|
|
20
|
P
= к19×M
|
к19 [Н/(кг×м2)]
|
|
21
|
Gвых
= к20×(Pвых
- P)
|
к20 [кг×м2/(Н×с)]
|
|
22
|
X2
= к21×P
|
к21 [м3/Н]
|
|
23
|
U2 = к22×X2
|
к22 [В/м]
|
3.2 Линеаризация
исходной системы уравнений
Особую роль в теории автоматического
управления играют линейные математические модели САУ. Такое понятие как
линейность, играет важную роль не только в теории автоматического управления,
но и во всех других дисциплинах, применяющих математический аппарат для
исследования того или иного процесса.
Если некоторый динамический объект
описывается дифференциальным уравнением, то он называется линейным объектом.
Только для линейного объекта выполняется принцип суперпозиции: при нулевых
начальных условиях, его реакция X(t) на комбинацию входных сигналов k1Y1(t)+k2Y2(t),…, k1Z1(t)+k2Z2(t), в точности равна той же линейной
комбинации его реакций X1(t) и X2(t), при тех же нулевых начальных условиях на каждый из входных
сигналов: Y1(t),…, Z1(t) и Y2(t),…, Z2(t).
Линейное дифференциальное уравнение
отличается от нелинейного по внешнему виду: в состав линейного входят сумма
линейных комбинаций переменных и их производных, возможно умноженных на
какой-либо коэффициент. Если у линейной функции имеется всего лишь одна
переменная, то график такой функции выглядит как прямая на плоскости координат,
проходящая через начало координат.
Если в систему дифференциальных
уравнений входят нелинейные уравнения, то такую систему стремятся линеаризовать
(т.е. привести нелинейные дифференциальные уравнения к линейному виду).
Линеаризация системы дифференциальных уравнений основана на следующих
предположениях:
. Предполагается, что в номинальном
режиме работы системы, отклонения значений возмущающих сигналов от их
номинальных величин малы (а следовательно малы и отклонения внутренних сигналов
в САР).
. Линеаризация некоторого
дифференциального уравнения в системе предполагает, что все функции, входящие в
уравнение являются гладкими (имеют хотя бы первую производную) при номинальных
значениях аргументов.
Произведем линеаризацию системы дифференциальных
уравнений, приведенных в табл. 1.
. U1 = к1×X1 - уравнение линейное, следовательно, получим:
u1 = K11×x1,
где K11 = к1.
2. U = U1 - U2 - уравнение линейное,
следовательно, получим:
u = u1 - u2.
. Uу = к2×U - уравнение линейное, следовательно,
получим:
uy = K21×u,
где K21 = к2.
4.  -
уравнение линейное, следовательно, получим:
-
уравнение линейное, следовательно, получим:
 ,
,
где К31
= к3, К41 = к4.
5. Зависимость ФВ1(I В1), задана графиком функции (рис. 5). Проведя касательную в точке,
соответствующей номинальному режиму работы, мы получим линеаризованную
зависимость этих величин в отклонениях:
 ,
,
где К51
[Вб/А].
. Eкз = к5×Ф в1×Wэму
- уравнение нелинейное, следовательно:
найдем частные
производные по всем аргументам:
 .
.
 .
.
.  -
уравнение линейное, следовательно, получим:
-
уравнение линейное, следовательно, получим:
 , где К81
= к6, К91 = к7.
, где К81
= к6, К91 = к7.
. Зависимость ФКЗ(I КЗ), задана графиком функции (рис. 6). Проведя касательную в точке,
соответствующей номинальному режиму работы, мы получим линеаризованную
зависимость этих величин в отклонениях:
 , где К101
[Вб/А].
, где К101
[Вб/А].
. Uа1 = к8×Ф кз×Wэму
- уравнение нелинейное, следовательно:
найдем частные
производные по всем аргументам:
 .
.
 .
.
.  -
уравнение линейное, следовательно, получим:
-
уравнение линейное, следовательно, получим:
 , где К131
= к9, К141 = к10.
, где К131
= к9, К141 = к10.
. МД = к11×IЯ×ФВД - уравнение нелинейное, следовательно:
найдем частные
производные по всем аргументам:
 .
.
 .
.
. -
уравнение линейное, следовательно, получим:
 ,
,
где К171
= к12.
. -
уравнение линейное, следовательно, получим:
 ,
,
где К181 = к13,
К191 = к14.
14. Зависимость ФДВ(I ДВ), задана графиком функции (рис. 7). Проведя касательную в точке,
соответствующей номинальному режиму работы, мы получим линеаризованную
зависимость этих величин в отклонениях:
 ,
,
где К201
[Вб/А].
. ЕЯ = к15×ФВД×WД
- уравнение нелинейное, следовательно:
найдем частные
производные по всем аргументам:
 .
.
 .
.
. -
уравнение линейное, следовательно, получим:
 ,
,
где К231
= к16.
. S0 = к17×XП
- уравнение линейное, следовательно, получим:
 ,
,
где К241
= к17.
. Gвх = к18×S0×(Pвх - P) - уравнение
нелинейное, следовательно:
найдем частные
производные по всем аргументам:
 .
.
 .
.
. -
уравнение линейное, следовательно, получим:
 .
.
. P = к19×M
- уравнение линейное, следовательно, получим:
 ,
,
где К281
= к19.
. Gвых = к20×(Pвых
- P) - уравнение линейное, следовательно, получим:
 , где К291
= к20.
, где К291
= к20.
. X2 = к21×P
- уравнение линейное, следовательно, получим:
 ,
,
где К301
= к21.
. U2 = к22×X2
- уравнение линейное, следовательно, получим:
u2 = K311×x2,
где K311 = к22.
Для большей наглядности, представим
полученные линеаризованные дифференциальные уравнения в виде таблицы 2.
Таблица 2. Система линеаризованных
дифференциальных уравнений исследуемой САР
|
№
|
исходное дифференциальное уравнение
|
линеаризованное дифференциальное уравнение
|
примечания
|
|
1
|
U1
= к1×X1
|
u1 = K11×x1
|
K11
= к1
[В/м]
|
|
2
|
U
= U1 - U2
|
u
= u1 - u2
|
|
|
3
|
Uу
= к2×U
|
uy
= K21×u
|
K21
= к2 [безразмерн.]
|
4 К31
= к3 [(В×с)/А]
Таблица 2. Система линеаризованных
дифференциальных уравнений исследуемой САР(продолжение)
|
5
|
 К51
[Вб/А] К51
[Вб/А]
|
|
|
|
6
|
Eкз
= к5×Ф в1×Wэму
|
|
|
7 К81
= к6 [(В×с)/А]
|
К91 = к7 [Ом]
|
|
|
|
|
8
|
 К101
[Вб/А] К101
[Вб/А]
|
|
|
|
9
|
Uа1
= к8×Ф кз×Wэму
|
|
|
10 К131
= к9 [(В×с)/А]
|
К141 = к10 [Ом]
|
|
|
|
|
11
|
МД = к11×IЯ×ФВД
|
|
|
|
12
|
К171=
к12[(Н×м×с2)/рад]
|
|
|
13 К181
= к13 [(В×с)/А]
Таблица 2. Система линеаризованных
дифференциальных уравнений исследуемой САР(продолжение)
|
14
|
 К201
[Вб/А] К201
[Вб/А]
|
|
|
|
15
|
ЕЯ = к15×ФВД×WД
|
|
|
|
16
|
К231
= к16 [м/рад]
|
|
|
|
17
|
S0
= к17×XП
|
К241
= к17 [м]
|
|
|
18
|
Gвх
= к18×S0×(Pвх-P)
|
|
|
|
19
|
|
|
|
|
20
|
P
= к19×M
|
К281
= к19 [Н/(кг×м2)]
|
|
|
21
|
Gвых
= к20×(Pвых
- P)
|
|
|
22
|
X2
= к21×P
|
К301
= к21 [м3/Н]
|
|
|
23
|
U2 = к22×X2
|
u2 = K311×x2
|
K311
= к22 [В/м]
|
3.3 Взвешенный
сигнальный граф и структурная схема линейной математической модели САР давления
в химическом реакторе
Составленная система линеаризованных
дифференциальных уравнений, позволяет определить для какой-либо внутренней
переменной, как она будет зависеть от входных в данную вершину сигналов. Но
довольно часто требуется определить зависимость переменных для вершин, которые
не соединены друг с другом ребрами. В этом случае необходимо последовательно
исключать из уравнений промежуточные переменные, постепенно определяя нужную
зависимость.
Процесс исключения промежуточных
переменных из уравнений достаточно сложен, поэтому используют менее трудоемкий метод,
основанный на передаточных функциях.
Заменив исходную систему
дифференциальных уравнений передаточными функциями мы можем представить
исходную САР в виде взвешенного графа, либо в виде структурной схемы (это
равносильные понятия). Что в итоге приведет нас к быстрому поиску интересующей
зависимости. Еще одним доводом в использование передаточных функций, является
наглядность изображения взвешенного графа или структурной схемы, позволяющая
моментально определить зависимость одной переменной от другой.
Но существенным ограничением на
использование передаточных функций является тот факт, что она ставит в
соответствие единственную функцию - выходной сигнал (при нулевых начальных
условиях), если на входе определена некоторая входная функция. Однако, это ограничение
практически всегда выполняется (ведь предполагается, что до подачи внешнего
возмущения система находилась в равновесии, т.е. отклонения значений величин от
номинальных были равны нулю).
Каждое дифференциальное уравнение в
системы приводится к операторному виду и таким образом определяется
передаточная функция в уравнении.
Т.о. для линеаризованной системы
дифференциальных уравнений (табл. 2) можно получить следующие передаточные
функции (табл. 3).
Таблица 3. Операторная форма записи
уравнений (таблиц 1,2)
|
№
|
исходное дифференциальное уравнение
|
линеаризованное дифференциальное уравнение
|
операторная форма записи
|
Примечания
|
|
1
|
U1
= к1×X1
|
u1 = K11×x1
|
u1 = K1×x1
|
W1(р)=К1
К1= K11[В/м]
|
|
2
|
U
= U1 - U2
|
u
= u1 - u2
|
u
= u1 - u2
|
|
|
3
|
Uу
= к2×U
|
uy
= K21×u
|
uy
= K2×u
|
W2(р)=К2
К2= К21[безразмерн.]
|
4 
 W3(р)=
W3(р)=

К3=1/ K41[Ом
-1]
5 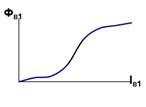
 W4(р)=К4
W4(р)=К4
6 Eкз
= к5×Ф в1×Wэму 
 W5(р)=К5,
W6(р)=К6
W5(р)=К5,
W6(р)=К6
К5= К61 
|
К6= К71 
|
|
|
7 
 W7(р)=
W7(р)=

К7=1/ K91[Ом
-1]
8 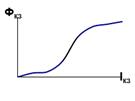
 W8(р)=К8
W8(р)=К8
9 Uа1
= к8×Ф кз×Wэму 
 W9(р)=К9,
W10(р)=К10
W9(р)=К9,
W10(р)=К10
К9= К111
|
К10= К121
|
|
|
10 
 W11(р)=
W11(р)=

К11=1/ K141[Ом
-1]
11 МД = к11×IЯ×ФВД 
 W12(р)=К12,
W13(р)=К13
W12(р)=К12,
W13(р)=К13
К12= К151 
|
К13= К161 
|
|
|
12 
 W14(р)=К14/р
W14(р)=К14/р
К14= 1/К171
13 
 W15(р)=
W15(р)=

К15=1/ K191[Ом
-1]
14 
 W16(р)=К16
W16(р)=К16
15 ЕЯ = к15×ФВД×WД 
 W17(р)=К17,
W18(р)=К18
W17(р)=К17,
W18(р)=К18
К17= К211
|
К18= К221
|
|
|
16  W19(р)=К19/р
W19(р)=К19/р
17 S0
= к17×XП  W20(р)=К20
W20(р)=К20
18 Gвх
= к18×S0×(Pвх-P) 
 W21(р)=К21,
W22(р)=К22
W21(р)=К21,
W22(р)=К22
W23(р)=К23
К21= К251 
К22= К261 
|
К23= К271
|
|
|
19 
 W24(р)=1/р
W24(р)=1/р
20 P
= к19×M  W25(р)=К24
W25(р)=К24
21 Gвых
= к20×(Pвых - P) 
 W26(р)=К25
W26(р)=К25
22 X2 = к21×P  W27(р)=К26
W27(р)=К26
|
К26= К301
[м3/Н]
|
|
|
|
|
23
|
U2 = к22×X2
|
u2 = K311×x2
|
u2 = K27×x2
|
W28(р)=К27
К27= К311[В/м]
|
Рисунок 8. Взвешенный граф САР
давления в химическом реакторе
После нахождения передаточной
функции каждого уравнения, можно перейти к построению взвешенного графа (рис.
8) и структурной схемы (рис. 9).
Рисунок 9. Структурная схема САР
давления в химическом реакторе
4. Главный оператор,
контурные и сквозные передаточные функции
.1 Определение главного
оператора САР давления в химическом реакторе
Построив взвешенный граф и
структурную схему, мы, тем самым, можем определить зависимость какой-либо
внутренней вершины от вершин, чьи ребра входят в данную (причем эта зависимость
будет линейной, с какими-либо коэффициентами при входящих сигналах, которые
называются весами данных ребер). Но довольно часто требуется определить
зависимость какой-либо внутренней вершины от задающего или возмущающих
воздействий. Для того, чтобы определить эту зависимость, необходимо определить
способ нахождения передаточной функции для дифференциального уравнения, которое
связывает изменение внутренней вершины в зависимости от изменения внешнего или
задающего воздействия. Такое дифференциальное уравнение и его передаточная
функция называются сквозными. Сквозная передаточная функция, связывающая главное
возмущающее воздействие с регулируемой величиной, называется главным оператором
САР. Для исследования свойства устойчивости, применяется контурное
дифференциальное уравнение (с соответствующей ему контурной передаточной
функцией).
В том или ином случае, для
нахождения сквозной передаточной функции, пользуются либо взвешенным графом,
либо структурной схемой. В случае взвешенного графа, сквозные передаточные
функции находятся с помощью формулы Мейсона. Если используется структурная
схема, то пользуются правилами преобразования структурных схем (эти правила
составляют алгебру передаточных функций). Важно отметить тот факт, что
использование формулы Мейсона довольно затруднительно в случае громоздких САР,
т.е. возможно получение вычислительных ошибок за счет высокой трудоемкости при
использовании данной формулы. Правила же преобразования структурных схем,
напротив, позволяют провести пошаговую процедуру приведения исходной
структурной схемы к нужному нам виду (возмущающее воздействие на входе, а одна
из внутренних вершин на выходе).
Т.о. можно найти главный оператор и
контурную передаточную функцию САР давления в химическом реакторе, используя
правила преобразования структурных схем (исходная схема изображена на рис. 9).
Для преобразования исходной схемы, примем
отклонения возбуждающих воздействий от номинального значения равным нулю и т.о.
останется только одна внешняя вершина, соответствующая задающему воздействию
(рис. 10).
Рисунок 10. Вид
структурной схемы после удаления всех возмущающих воздействий
Дальнейшее
преобразование заключается в преобразовании последовательно соединенных
передаточных функций (на рис. 10 они обведены пунктиром). Результатом такого
преобразования, по правилам алгебры передаточных функций, будет схема,
представленная на рис. 11. Т.е. мы заменяем последовательно соединенные
передаточные функции, одной, равной их произведению.
Рисунок 11. Схема после
преобразования последовательных звеньев
Следующим этапом является
преобразование отрицательных обратных связей в схеме на рис. 11 (обозначено
пунктиром). Т.о. получим схему, представленную на рис. 12.
Рисунок 12. Схема после
преобразования звеньев отрицательной обратной связи
Используя те же правила
преобразования структурных схем (последовательное соединение и соединение
обратной связи), последовательно получаем окончательную схему (рис. 13, 14).

Рисунок 13. Последний
этап преобразования структурной схемы

Рисунок 14. Окончательно
преобразованная схема (данная передаточная функция - главный оператор САР)
Для простоты и удобства
использования в дальнейшем, раскроем скобки в знаменателе главного оператора и
введем обозначения (рис. 14):

Т.о. передаточная
функция, соответствующая дифференциальному уравнению САР, связывающему задающее
воздействие и регулируемую величину, имеет вид:
 .
.
Раскрывая скобки в знаменателе
главного оператора (рис. 14), получим:
Одним из важнейших
понятий в САР, является понятие об устойчивости данной системы. Исследование
свойства устойчивости системы однозначно связано с анализом контурного
дифференциального уравнения и соответствующей ему контурной передаточной
функции. Рассмотрим порядок вычисления контурной передаточной функции.
«Разорвем» в любом месте
основной контур системы. Допустим, мы перерезали провода, ведущие от нижнего
потенциометра моста (измерительного устройства). Т.о. в системе будет образован
новый вход, соответствующий новому возбуждающему воздействию(u21). Если положить равным нулю отклонения значений всех возбуждающих
и задающего воздействий, то сквозная передаточная функция, связывающая
зависимость величины u2
с возбуждающем воздействием u21,
взятая со знаком минус, будет иметь название контурной передаточной функции.
Данная функция однозначно определяется видом САР, и не зависит от места
«разрыва» основного контура системы.
Для нахождения контурной
передаточной функции, примем отклонения всех возмущающих воздействий от
номинальных значений, равным нулю. Т.о. можно упростить структурную схему (рис.
9) и перейти к преобразованию по правилам алгебры передаточных функций (рис.
15).
Рисунок 15 - Схема (рис.
9) после удаления всех возмущающих воздействий
Преобразовав схему на
рис. 15 (преобразование последовательно объединенных звеньев), получим схему,
изображенную на рис. 16.
Рисунок 16. Вид схемы
(рис. 15) после объединения последовательных звеньев
Дальнейшее
преобразование схемы (рис. 16), заключается в упрощении звеньев, соединенных
обратной связью и последовательно (рис. 17, 18).
Рисунок 17. Вид схемы
(рис. 16) после объединения звеньев отрицательной обратной связи

Рисунок 18. Вид схемы (рис. 17)
после упрощения звеньев обратной связи

Рисунок 19. Окончательно
упрощенная схема для нахождения контурной передаточной функции
Окончательно
получившаяся сквозная передаточная функция (рис. 19), взятая со знаком минус,
соответствует контурной передаточной функции САР давления в химическом
реакторе.
Для простоты
использования контурной передаточной функции в дальнейшем, введем обозначения
(учитывая введенные в главе 4.1):

Раскрывая скобки в
знаменателе сквозной передаточной функции (рис. 19), получим:
4.3 Определение сквозной
передаточной функции
В качестве примера
определения сквозных передаточных функций по структурной схеме, приведем пример
нахождения сквозной передаточной функции, связывающей задающее воздействие(x1)
с величиной отклонения активной площади задвижки от ее номинального
значения(s0): s0 = Фx1, s0 (p)x1.
Для определения данной
передаточной функции, преобразуем исходную структурную схему (рис. 9) к виду,
представленному на рис. 20. Иными словами, оставим только нужную нам внешнюю
вершину(x1), а остальные удалим (в установившемся режиме работы отклонения
соответствующих сигналов от их номинального значения будут равны нулю).
Рисунок 20. Вид
структурной схемы после упрощения
Используя правила для
последовательно соединенных звеньев схемы и звеньев, соединенных посредством
обратной связи (рис. 20), последовательно можно получить следующие упрощенные
схемы: рис. 21, 22.

Рисунок 21. Вид
структурной схемы (рис. 20) после упрощения последовательно соединенных звеньев
Рисунок 22. Вид
структурной схемы (рис. 21) после упрощения звеньев обратной связи
Дальнейшее
преобразование полученной схемы (рис. 22) заключается в применении правил
алгебры передаточных функций для схем, получаемых последовательным упрощением
(рис. 23, 24), вплоть до получения искомой сквозной передаточной функции (рис.
25).
Рисунок 23. Вид структурной схемы
(рис. 22) после упрощения
Рисунок 24. Вид
структурной схемы (рис. 23) после упрощения

Рисунок 25.
Окончательный вид упрощенной схемы
Для простоты
использования сквозной передаточной функции в дальнейшем (рис. 25), используем
следующие сокращения:
Т.о. общий вид сквозной передаточной
функции следующий:
 .
.
Где соответствующие
параметры, после раскрытия скобок в знаменателе передаточной функции (рис. 25)
имеют вид:
Заключение
В данной курсовой работе было
проведено исследование САР давления в химическом реакторе, которое заключалось
в следующем: определение объектов управления, построение сигнального графа,
составление системы дифференциальных уравнений, линеаризация исходной системы
уравнений, переход к операторной форме записи линеаризованной системы
уравнений, построение взвешенного графа и структурной схемы данной САР,
нахождение главного оператора и контурной передаточной функции САР.
Целью исследования исходной САР,
было нахождение способа составления и решения дифференциального уравнения,
которое связывает одно из возмущающих или задающее воздействия с какой-либо
внутренней вершиной(сигналом). Такой способ был найден и представлен в данной
курсовой работе (как один из возможных методов решения системы дифференциальных
уравнений).
Важно понимать тот факт, что
структура системы дифференциальных уравнений может быть различна для одной и
той же САР. Это объясняется тем уровнем абстракции, который мы используем при
построении той или иной модели реальной системы. Абстракция позволяет упростить
задачу и рассмотреть только интересующие нас стороны процесса или явления, т.к.
в ином случае, мы имели бы дело с точной копией, исследование которой также
затруднительно, как и исследование оригинала.
Дальнейшее продолжение работы может
осуществляться в исследовании конкретных сквозных передаточных функций,
применении других способов для нахождения передаточных функций и нахождение
интересующего решения при заданных значениях константных величин.
Список использованных
источников
1. Воронов А.А. Основы теории автоматического управления. - М.:
Энергия, 1980. - 312 с.
2. Забродин Ю.С. Промышленная электроника: Учебник для вузов.
- М.: Высшая школа, 1982. - 496 с.: ил.
. Сапожников Р.А. Основы технической кибернетики. - М.:
Высшая школа, 1970. - 464 с.
. Цыпкин Я.З. Основы теории автоматических систем. - М.:
Наука, 1977. - 456 с.