Моделирование реактора непрерывного действия
МИНОБРНАУКИ
РОССИИ
Федеральное
государственное бюджетное образовательное учреждение высшего образования
“Тверской
государственный технический университет”
Кафедра
автоматизации технологических процессов
Курсовая
работа
По
дисциплине “Моделирование систем управления”
На
тему “Моделирование реактора непрерывного действия”
Выполнил: Мякатин И.Д.
Принял: Требухин А.Г.
Тверь
2016
Введение
Цель состоит в изучении:
способов разработки математических моделей
объектов управления,
методики разработки программ для системы МатЛаб,
позволяющих реализовывать численный анализ математических моделей объектов
управления,
методики разработки моделей систем управления и
их исследования средствами пакета Simulink.
В первой части рассматриваются вопросы моделирования
объекта управления, во второй - моделирования локальных систем управления. Все
вычислительные эксперименты выполнять в MatLab.
Моделирование объекта управления.
Первая часть курсовой работы выполняется с
использованием базовых средств программирования системы Матлаб. В ходе
выполнения первой части курсовой работы студент должен решить следующие задачи:
·
разработать
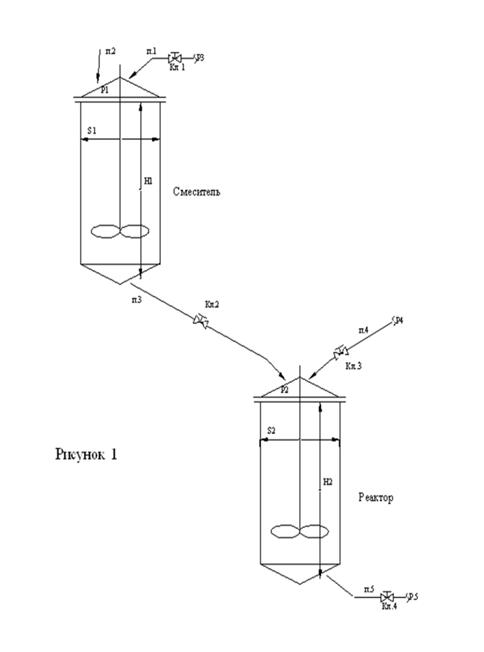
математическую модель объекта управления, схема которого приведена в задании,
(сформировать список допущений, составить уравнения динамики и статики
объекта);
·
выполнить
качественный анализ математической модели объекта:
-- на блок-схеме объекта указать составляющие
вектора входных и выходных координат объекта,
-- перечислить каналы по управлению.
·
-
выполнить количественный анализ математической модели объекта:
-- разработать m-файлы с программой численного
решения уравнений математической модели динамики объекта на ЭВМ,
-- получить переходные характеристики объекта по
каналам, указанным в задании;
-- выполнить сравнительную оценку каналов.
·
выполнить
линеаризацию математической модели объекта по каналу, указанному в задании:
получить передаточные функции и найти их параметры
Моделирование АСР. Вторая часть работы
выполняется с помощью пакета моделирования динамических систем Simulink,
являющимся расширением системы MatLab.
Во второй части курсовой работы студент должен решить следующие задачи:
для указанного в задании вида АСР, используя
найденные передаточные функции, определить приближенные настройки регулятора;
разработать модель системы автоматического
регулирования, используя линеаризованную модель объекта управления
(передаточную функцию по заданному каналу).
проанализировать работу АСР по результатам
имитационных экспериментов.
Исходные данные
|
Вариант
|
Рис.
|
Возмущение
по входам
|
Линеаризация
=> W(P)
|
|
12
|
1
|
Входы:K1,
K2, G2
|
H1 (P) / K1(P), H1 (P)
/ K2(P)
|
|
variant
|
рис
|
S1
|
S2
|
p1
|
p2
|
p3
|
p4
|
p5
|
G1
|
|
|
12
|
1
|
2,3
|
2,3
|
0,8
|
0,5
|
1,2
|
1,8
|
1
|
0,8854
|
|
|
G2
|
G3
|
G4
|
G5
|
H1
|
H2
|
k1
|
k2
|
k3
|
k4
|
2,2856
|
3,4205
|
6,827
|
9,474
|
2,1019
|
1,4
|
0,6
|
3
|
1,9
|
|
|
r1
|
r2
|
r3
|
CA0
|
СS0
|
CA
|
CS1
|
CA1
|
CR1
|
|
|
1,4
|
1,4
|
1,3
|
65
|
22
|
39,8175
|
19,8316
|
6,0333
|
3,2721
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.
|
поток
1
|
поток
2
|
поток
3
|
поток
4
|
поток
5
|
|
1
|
Разбавитель
|
Раствор
A Концентр.=CA0
|
Раствор
A Концентр.= CA
|
Раствор
S Концентр.= CS0
|
Смесь
A, R, S Концентр. = CA1=
CR1
=
CS1
|
|
Номер
рисунка
|
Химическая
реакция
|
|
Рис.1
|
|
Скорости протекания химической реакции:


1. Разработка математической модели объекта
управления
Допущения:
1) 

2) 
Уравнения статики
) Общий материальный баланс:) Для
смесителя
B) Для реактора
2) Общий материальный баланс по веществу A:
A) 
B) 
3) Общий материальный баланс по веществу S:
A) -
B) 
) Общий материальный баланс по веществу R:) -
B) 
5) 


Уравнения динамики
) Общий материальный баланс:) Для
смесителя
автоматизированный математический
модель вычислительный
) Для реактора
2) Общий материальный баланс по веществу A:
A) 
B) 
) Общий материальный баланс по веществу S:
A) -
B) 
) Общий материальный баланс по веществу R:
A) -
B) 
Для решения системы дифференциальных уравнений
перейдем к другим переменным:
1) 
2) 
3) 
4) 
5) 
6) 
Запишем систему дифференциальных уравнений с
учетом замены:
Пересчет начальных условий






Рассчитаем значения γ1
и
γ2



Блок-схема
Реализуем программу в среде MatLab
для решения полученной аналитически системы дифференциальных уравнений
|
Листинг
файла-программы:
clc clear close all global S1 S2 K1 K2 K3 K4 p1 p2... p3 p4 p5 j1 j2 CA0
CS0 r1 r2 r3 G2; H1=9.474;H2=2.1019; S1=2.3; S2=2.3;
K1=1.4;K2=0.6;K3=3;K4=1.9; p1=0.8;p2=0.5;p3=1.2;p4=1.8;p5=1; j1=1.5;j2=6.38;
CA0=65; CS0=22; r1=1.4;r2=1.4;r3=1.3;G2=1.4; nach=[21.7902, 4.83437,
867.6312885, 29.167204521, 95.873292092, 15.818542077]; [t,y]=ode45(@fun,[0
20],nach); for i=1:size(t) V(i,1)=y(i,1); V(i,2)=y(i,2);
C(i,1)=y(i,3)/y(i,1); C(i,2)=y(i,5)/y(i,2); C(i,3)=y(i,4)/y(i,2);
C(i,4)=y(i,6)/y(i,2); end; figure(1) hold on,grid on,plot(t,V); legend('Объем
смесителя "V1"','Объем реактора "V2"'); xlabel('Время,
с');ylabel('Объем'); figure(2) hold
on,grid on,plot(t,C); legend('Концентрация
CA','Концентрация CA1','Концентрация CS1',... 'Концентрация CR1');
xlabel('Время, с');ylabel('Концентрация'); nach1=[y(end,1)
y(end,2) y(end,3) y(end,4) y(end,5) y(end,6)]; wozm=input('Возмущение
по входу(1-K1, 2-K2, 3-G3) :'); var=input('1:
+50%, 2: -50%: '); switch wozm case 1 switch var case 1 K1=1.5*K1; case
2 K1=0.5*K1; end case 2 switch var case 1 K2=1.5*K2; case 2 K2=0.5*K2;
end case 3 switch var case 1 G2=1.5*G2; case 2 G2=0.5*G2; end end
[t1,y1]=ode45(@fun,[20 40],nach1); for i=1:size(t1) V1(i,1)=y1(i,1);
V1(i,2)=y1(i,2); C1(i,1)=y1(i,3)/y1(i,1); C1(i,2)=y1(i,5)/y1(i,2);
C1(i,3)=y1(i,4)/y1(1,2); C1(i,4)=y1(i,6)/y1(i,2); end; figure(1)
plot(t1,V1); figure(2) plot(t1,C1);
|
Листинг
файла-функции:
function dydt=fun(t,y) global S1 S2 K1 K2 K3 K4 p1 p2... p3 p4 p5 j1 j2 CA0
CS0 r1 r2 r3 G2; G1=K1*sqrt(p3-p1); G3=K2*sqrt(p1+j1*(y(1)/S1)-p2);
G4=K3*sqrt(p4-p2); G5=K4*sqrt(p2+j2*(y(2)/S2)-p5);
CA=y(3)/y(1);CA1=y(4)/y(2);CS1=y(5)/y(2);CR1=y(6)/y(2); dydt=[(G2+G1-G3);
(G3+G4-G5); (G2*CA0-G3*CA); ... (G3*CA-G5*CA1+(CR1*r2-CA1*r1-CA1*r3)*y(2));
... (G4*CS0-G5*CS1+(CA1*r3)*y(2)); (-G5*CR1+(CA1*r1-CR1*r2)*y(2));]; end
|
2. Результаты работы программы
Возмущающие воздействия отсутствуют (статический
режим работы)
Выбираем установившиеся значения выходов
(“новые” начальные условия) и добавляем возмущение по входу K1
(все возмущающие воздействия будут подаваться в момент времени 20 секунд): K1+50%=2.1
K1-50%=0.7
Возмущение по входу K2
K2+50%=0.9
K2-50%=0.3
Возмущение по входу
G2 +50%=2.1
G2-50%=0.7
Линеаризация мат. Модели.
Необходимо найти ПФ:
Рассмотрим уравнение ОМБ для смесителя:


) Допустим, что K2=const,
перейдем в уравнении (3) к приращениям:
Перейдем в область изображений по Лапласу:

В уравнении (5) перенесем изображение выхода по
Лапласу в левую часть уравнения, а изображение входа, соответственно, в правую:
Найдем отношение изображения выхода к входу по
Лапласу, т.е. интересующую нас ПФ:
Введём обозначение 

) Допустим, что K1=const,
перейдем в уравнении (3) к приращениям:

Перейдем в область изображений по Лапласу:

В уравнении (9) перенесем изображение выхода по
Лапласу в левую часть уравнения, а изображение входа, соответственно, в правую:

Введём обозначение
Найдем отношение изображения выхода к входу по
Лапласу, т.е. интересующую нас ПФ:
Получили 2 передаточные функции вида:


Рассчитаем значения коэффициентов усиления и
постоянной времени:



Тогда:

Знак “-” во второй передаточной функции
показывает то, что при увеличении степени открытия клапана 2 уровень жидкости в
смесителе будет уменьшаться.
. Моделирование автоматической системы
регулирования в Simulink
Для начала необходимо рассчитать параметры
настройки ПИ-регулятора. Для этого будем использовать аналитический метод
расчёта параметров настройки регулятора(-ов). Качественные характеристики
переходного процесса (время переходного процесса, степень колебательности,
перерегулирование) зависят от действительной и мнимой части корней знаменателя
ПФ колебательного звена. Соответственно, можно подобрать такие параметры
настройки регулятора, которые будут обеспечивать заданные характеристики
качества переходного процесса.


Зададим время переходного процесса равное 10с и
степень колебательности равную 0.5 соответственно.
Передаточная функция объекта управления:
Передаточная функция ПИ-регулятора:
Передаточная функция разомкнутой системы:
Передаточная функция замкнутой системы:
Корни знаменателя ПФ замкнутой системы:

Из уравнения (1) следует, что:
В нашем случае:
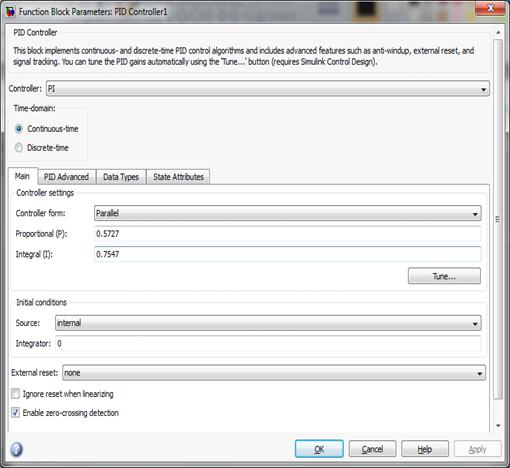
Рассчитаем k1
по формуле (2) и k2
по формуле (3):

Используем полученные значения при моделировании
АСР в Simulink

Переходный процесс в АСР без возмущений
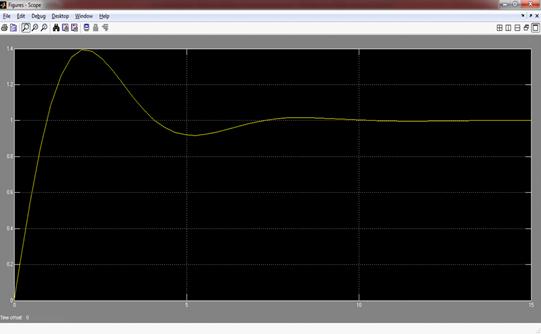
Переходный процесс в АСР с возмущением
Как видно по графикам, при появлении возмущений
увеличивается перерегулирование. В данном случае увеличилось на 7%.
Список литературы
1. Конспекты
лекций по курсу “Моделирование систем управления”
. Филатова
Н.Н. Моделирование биотехнических систем: учебное пособие/Н.Н. Филатова. Тверь:
ТГТУ, 2008. 134 с.
. Конспекты
лекций по курсу “Автоматизация технологических процессов и производств”