Повышение эксплуатационной эффективности зимних ошипованных шин
Введение
Значительная часть территории РФ располагается в
областях умеренного и умеренно-холодного климата, из-за чего большие по
протяженности участки автодорожной сети страны в зимнее время года покрываются
слоем укатанного снега или льда. Это существенно понижает безопасность
дорожного движения и увеличивает продолжительность доставки грузов и
пассажиров.
Региональные службы, в чьей компетенции
находится содержание автомобильных дорог, вынуждены принимать определенные меры
по борьбе с обледенением дорожного покрытия в зимние месяцы.
Существует несколько способов борьбы с зимней
скользкостью. Основными из них является механическая уборка снега с проезжей
части и рассыпание на дороги песчаных и песчано-солевых смесей с применением
солей, обладающих способностью при взаимодействии со снежно-ледяными
отложениями переводить их в раствор, не замерзающий при отрицательных
температурах.
Но наиболее эффективным и общепризнанным
способом борьбы с зимней скользкостью является оснащение автомобильных шин
шипами противоскольжения, благодаря которым удается повысить устойчивость и
управляемость автомобиля на обледенелой поверхности дороги, сократить тормозной
путь и время разгона, уменьшить утомляемость водителя и увеличить среднюю
скорость движения.
В настоящее время производится и эксплуатируется
множество видов протекторов и типоразмеров зимних шин. Все новые шины
появляются с целью улучшить управляемость автомобиля и повысить безопасность
движения в сложных зимних условиях.
Шины современного автомобиля - один из наиболее
важных компонентов его активной безопасности. Высокий коэффициент сцепления с
дорогой - гарантия во многих случаях безопасного движения автомобиля. Но его
величина ограничена и зависит от многих факторов. Процессы, происходящие в зоне
контакта, довольно сложны и пока еще не выяснены с достаточной точностью. Для
безопасности движения очень важно обеспечение высокого коэффициента сцепления
шин с дорожным покрытием.
Зимние шипованные шины позволяют тормозной путь
автомобиля на заснеженной и обледеневшей трассе сократить на 40-50%, увеличить
сопротивляемость боковому заносу и устойчивость, уменьшить пробуксовку колес.
На основании этого уже весь мир признал преимущества сезонной смены покрышек.
1.Литературный обзор
В настоящее время производится и эксплуатируется
множество видов протекторов и типоразмеров зимних шин. Все новые шины
появляются с целью улучшить управляемость автомобиля и повысить безопасность
движения в сложных зимних условиях.
Для улучшения сцепления с обледенелой либо
покрытой укатанным снегом шины могут оснащаться шипами. Такая резина называется
шипованной. Рисунок протектора таких шин содержит четко выраженные “шашечки” от
продольных и поперечных канавок немалой глубины. У “шашек” трудный фигурный
рельеф для увеличения рабочих боковых поверхностей, прорези которого могут
сообщаться с канавками либо быть закрытыми. Элементы рисунка протектора
предельно приспособлены для сцепления с обледеневшей дорогой- всякая прорезь в
контакте с путем образует ступенчатую грань, которая “зацепляется” за микрошероховатости
дорожного покрытия.
При движении автомобиля при температуре
окружающего воздуха до -10° С и даже ниже в зоне контакта шины с дорогой каждый
раз присутствует тонкий слой влаги (шина нагревается от трения и деформации). В
связи с этим на заснеженной дороге цель шипов противоскольжения - продавливать
влажную плёнку, играющую роль смазки, и обеспечивать надёжный контакт с
дорожным полотном.
Шипы располагаются в ряды, что улучшает
сцепление с дорогой при интенсивном торможении, в том числе и при юзе и при
разгоне. Как правило, шипы размещены примерно на расстоянии 1/3 от краёв
протектора, там, где при качении шины создаётся наибольшее удельное давление, и
выступают на 1,0- 1,5 мм. В данном случае шипы будут прекрасно вгрызаться в
поверхность. Их запрещено ставить стройными рядами. В пятне контакта будет
работать только лишь первый шип из шеренги, прочие - лишь только скользить по
проделанной канавке, не цепляясь за лёд.
Число шипов зависит от размеров шины.
Центральная часть протектора не подвергается ошиповке. Это необходимо для
сохранения сцепления с чистым дорожным полотном.
Технология ошиповки шин включает две основные
операции: образование глухих отверстий в протекторе и запрессовку в них шипов.
Кроме этого, необходимо выполнение ряда вспомогательных операций: разметка
перед сверлением, подготовка и текущий ремонт инструмента, контроль качества
отверстий после сверления и контроль положения шипов после запрессовки,
исправление выявленных дефектов, транспортировка и хранение продукции.
Глухие отверстия в шашках беговой дорожки
протектора для установки шипов можно получить двумя способами:
1. В
процессе вулканизации беговой дорожки, непосредственно на заводе - изготовителе
шин. Отверстия получают высокого качества, но необходимо применять шипы строго
определенного размера. Поэтому многие фирмы ограничиваются только обозначением
мест, рекомендованных для установки шипов.
2. Сверление
отверстий. Оно может производится двумя, принципиально отличающимися друг от
друга по конструкции инструментами: перовым или трубчатым сверлами [1].
Перовое сверло (рисунок 1) напоминает обычное
спиральное, но с большим шагом и специальной заточкой.

Рисунок 1. Перовое сверло со специальной
заточкой
Приемлемое качество отверстий при сверлении
таким сверлом обеспечивается высокооборотными малогабаритными пневмо - и
электросверлильными машинами с частотой вращения сверла 1620 тыс.
об/мин. На рисунке 2 представлена японская пневматическая сверлильная машина
UG-38. Диаметр отверстия, который должен составлять около 35% диаметра шипа,
практически не отличается от размера сверла. Глубина сверления устанавливается
с помощью специальной ограничительной втулки в зависимости от высоты шашек
беговой дорожки протектора и типоразмера выбранного шипа. Сверление может
производиться вручную или на стендах.

Рисунок 2. Пневматическая сверлильная машина
UG-38
Другим не менее распространенным инструментом
для выполнения отверстий является трубчатое (полое) сверло (рисунок 3).
Небольшое число оборотов, необходимое для сверления (достаточно 8001200
об/мин) и отсутствие стружки или каких-либо других отходов резания (вырезаемая
часть резины извлекается из отверстия целиком) являются бесспорным
преимуществом трубчатого сверла.

Рисунок 3. Трубчатое (полое) сверло
Представленные выше конструкции охватывают всю
гамму инструмента, применяемого при сверлении отверстий в шинах.
Не менее ответственной технологической операцией
является установка (запрессовка) шипов в шину. Наиболее массовым способом
запрессовки шипов являются установка их с помощью специальных пневматических
пистолетов. Самыми распространенными являются пистолеты типа AS, ЕР, ЕРК
(Германия) (рисунок 4); SCASOMAT НDР (Финляндия), Ш-305, Ш-З06 (Россия).

Рисунок 4. Пневмопистолеты для ошиповки шин
фирмы OKU: А - типа AS; б - типа EPK; в - типа ЕР
Принцип работы пистолетов одинаков,
следовательно, рассмотрим его на примере пистолета Ш-305. Внешний вид показан
на рисунке 5, а устройство на рисунке 6 [2].

Рисунок 5. Внешний вид пневмопистолета Ш-305 для
ошиповки шин
Рисунок 6. Устройство пневмопистолета модели
Ш-305 для ошиповки шин
шина автомобиль безопасность
По каналу 28 сжатый воздух подается к золотнику.
При нажатии на кнопку 24 открывается доступ воздуха во внутренний (рабочий)
цилиндр 8. Поршень 2 цилиндра, перемещаясь вправо, через шток 23 давит на шип.
Своим верхним фланцем шип раздвигает направляющие губки 16 пистолета,
вставленные в отверстие шины, в результате чего диаметр отверстия
увеличивается. При дальнейшем движении штока шип входит в отверстие.
Одновременно конец штока приподнимает отсекатель 12, открывая доступ очередному
шипу из приемной трубки 10 в накопительную камеру 11. В этот момент внешняя
нагрузка на пистолет, осуществляемая оператором, снимается и шток, опираясь на
уже вставленный шип, вытягивает губки пистолета из зазора между шипом и
резиной. Шип охватывается освобожденной резиной и оказывается запрессованным.
Только после этого отпускается кнопка 24. и золотник пружиной 30 возвращается в
исходное положение. При этом сжатый воздух через полость между наружным
цилиндром (цилиндром возврата) 7 и рабочим цилиндром 8 и отверстия 22 в стенках
рабочего цилиндра проникает в последний, перемещая поршень влево.
Под действием стяжного резинового кольца 13
губки сходятся вместе, а отсекатель 12 опускается и перекрывает подающий канал.
При дальнейшем перемещении шток освобождает шип, находящийся в накопительной
камере, и тот под действием собственного веса опускается в канал, образованный
тремя губками 16. Воздух, находящийся в над поршневой части цилиндра, через
кольцевой канал золотника вытесняется в выпускной канал 31, откуда отработавший
воздух выходит в атмосферу или в дополнительную гибкую питающую трубку,
обеспечивая перемещение находящихся в ней шипов независимо от положения трубки.
Питающие трубки применяются при работе без автоматических питателей, в целях
экономии времени на "перезарядку" в них закладывается по 3035
шипов, ориентированных верхним фланцем вперед.
Для повышения производительности и удобства
подачи шипов применяются подающие устройства (питатели) роторного или
вибрационного типов. Роторный питатель (рисунок 7) представляет собой барабан,
расположенный под углом примерно в 60 градусов к горизонтальной плоскости и
вращаемый рукой или электродвигателем со скоростью 45 об/мин.
Боковая стенка барабана имеет прорези шириной меньше, чем диаметр верхнего
фланца, но больше диаметра корпуса шипа. При вращении барабана корпус шипа
проваливается в прорезь, шип переворачивается и повисает на верхнем фланце. По
мере вращения барабана провалившиеся шипы поднимаются в верхнюю точку, где
специальная пружинка сбрасывает их в подающую трубку. Таким образом, шипы
заполняют трубку уже развернутыми в нужную сторону. По такому принципу работают
подающие устройства FN, ZN (Германия) и Rotovac (Швеция).

Рисунок 7. Роторный питатель
Особенность роторных подающих устройств состоит
в том, что в них ориентируются только те шипы, у которых диаметр верхнего
фланца больше диаметра головной части.
Наибольшее распространение в России получили
станки немецкой фирмы «OKU». Привлекает в них простота конструкции, легкость в
эксплуатации и возможность работы с любым типом шипов. Кроме того, в станках
этой фирмы применяются те же элементы шиповального оборудования, что и при
ручной ошиповке. Таким образом, имеется возможность постепенного развития
станочного парка при увеличении объемов производства без замены оборудования.
Общий вид станка показан на рисунке 8.

Рисунок 8. Станок-полуавтомат «OKU» для ошиповки
шин
Принцип действия станков JH-AUTOMATIK Model А,
Model. М, Model Е аналогичен описанному выше, только вместо универсальных
пистолетов применяются пневмоцилиндры аналогичного принципа действия. Модели
«А» и «М» могут оборудоваться лазерными прицелами, облегчающими точное
попадание губок в отверстие шины, и индукционным датчиком DS-92 наполнения
трубки питателя шипами. Датчик не позволяет переполняться накопительной трубке,
и тем самым уменьшает вероятность попадания в нее перевернутого шипа. Станок
модели "А" может работать в автоматическом режиме. При этом двумя управляющими
контактами заранее определяется продолжительность рабочих циклов в зависимости
от квалификации оператора. Производительность станков - 35, 23 и 15 шин в час
соответственно. Питание: электроэнергия напряжением 220В и сжатый воздух
давлением 0,6 МПа.
Подавляющее большинство стендов в той или иной
степени повторяют описанные конструкции, однако, известны и оригинальные
устройства. Например, фирма «Стим» (Самара) предлагает пневмопрессы моделей
КШ-1, 2, 3 и полуавтомат модели ПАШ-1. Полуавтомат работает с шипами диаметром
78 мм с производительностью 1012 шипов в минуту. Ориентацию
шины осуществляют оператор. В автоматическом режиме выполняются: фиксация шины,
образование отверстия, запрессовка шипа и возврат в исходное положение.
Полуавтомат может крепиться к столу, верстаку, стене, занимает 0,5 м2 площади,
и весит не более 60 кг. Для его работы нужен сжатый воздух давлением 0,50,6
МПа и электроэнергия напряжением 220В. Работа полуавтомата основана на
пробивании отверстия и запрессовке шипа без извлечения оставшегося в отверстии
столбика резины.
Шипы противоскольжения, имеющиеся в настоящее
время на рынке, отличаются большим разнообразием конструкций, применяемых
материалов и технологических процессов изготовления. В настоящее время
различными фирмами России и зарубежных стран выпускается несколько сотен
типоразмеров шипов противоскольжения: для легковых и грузовых автомобилей,
мотоциклов, тракторов, велосипедов и даже ботинок [3, 4]. Абсолютное
большинство, за исключением только чисто спортивных шипов, имеют следующие
конструктивные элементы (рисунок 9):
·
корпус
с одним или несколькими фланцами;
·
вставка
из износостойкого материала, как правило, из твердого сплава ВК-8, закрепленная
в осевом отверстии корпуса запрессовкой по конусу или пайкой, и непосредственно
взаимодействующая с дорожным покрытием.
Рисунок 9 - Конструкция шипов противоскольжения:
1 - твердосплавная вставка; 2 - нижний фланец; 3 - средний фланец; 4 - корпус;
5 - верхний фланец
Шип противоскольжения состоит из 2 деталей:
корпуса и твердосплавной вставки.
Корпуса шипов выполняют три основные задачи:
·
надежное
закрепление шипа в отверстии протектора;
·
надежное
закрепление твердосплавной вставки в корпусе;
·
передача
нагрузок, возникающих при контакте вставки с дорогой, на резину протектора и
наоборот, передача упругих сил резины на вставку.
Соответственно, к материалам корпусов шипов
предъявляются следующие требования:
·
механическая
прочность;
·
коррозионная
и химическая стойкость к воздействию воды, солей, нефтепродуктов в условиях
повышенных температур;
·
технологичность
(способность подвергаться обработке);
·
невысокая
стоимость.
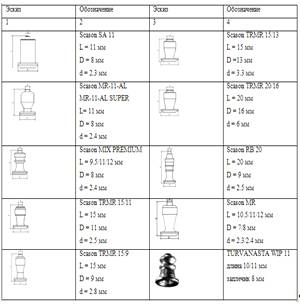
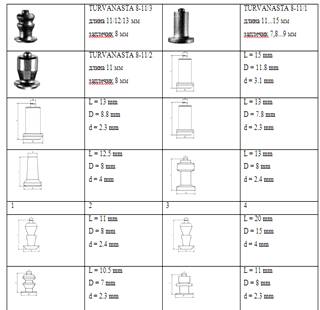
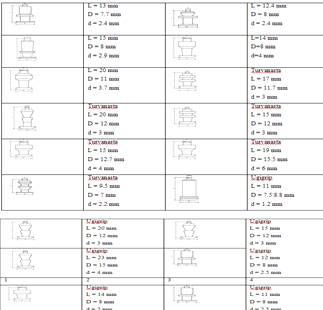
Корпуса шипов, имеющихся в настоящее время на
рынке, отличаются большим разнообразием конструкций, применяемых материалов и
технологических процессов изготовления. В таблице 1 представлен основной
ассортимент шипов противоскольжения крупнейших производителей (Scason,
TURVANASTA, Ugigrip,
Sitec) [1].
Таблица 1. Формы корпусов шипов
противоскольжения
В процессе эксплуатации ошипованная шина
подвержена процессу износа.
Износостойкость шипов и шины определяется целым
рядом факторов, которые можно разделить на конструктивные и эксплуатационные
[3,4].
Конструктивными факторами являются:
размеры и конструкция шипа;
высота выступания шипа из протектора шины;
жесткость резины протектора;
степень натяга при посадке шипа в отверстие
протектора (определяется разностью диаметров шипа и отверстия);
Эксплуатационными:
дорожные условия, т.е. степень обледенения
дороги в местах эксплуатации автомобиля, наличие воды, соли и песка на дороге.
стиль вождения (наличие постоянных резких
разгонов и торможений или плавность трогания с места и торможения).
С точки зрения конструктивных факторов,
наивысшей износостойкостью и работоспособностью обладают те шипы, у которых
обеспечено надежное удерживание их в протекторе шины, минимальное раскрытие
зазоров при отклонении шипа, в которые может попасть соль и песок, и имеется
возможность их утапливания в протекторе шины при движении автомобиля по
очищенному ото льда и снега дорожному покрытию (голому асфальту или
асфальтобетону).
С точки зрения эксплуатационных факторов,
наибольшую долговечность и работоспособность может обеспечить плавность
трогания автомобиля с места, отсутствие на поверхности дороги песка и соли, а
также избежание езды по чистому асфальту.
Как показали испытания, проведенные НИИАТ,
правильно ошипованные шины в условиях нормальной эксплуатации сохраняют
эффективность до 35...40 тыс. км пробега на легковых автомобилях.
Но не стоит забывать, что важнейшим техническим
свойством ошипованной шины является схема расположения шипов на протекторе. От
схемы ошиповки зависит, насколько эффективно будут работать шипы при разных
режимах движения автомобиля (торможение, разгон, поворот и т.д.).
На основании анализа рассмотренных литературных
источников можно сделать следующие выводы:
·
для
увеличения коэффициента сцепления колес автомобиля с обледенелой поверхностью
дороги необходимо использование ошипованных зимних шин;
·
срок
эффективной работы шипов противоскольжения в протекторе шины значительно
меньше, чем срок эксплуатации самой шины;
·
интенсивность
износа ошиповки зимней шины в значительной степени определяется конкретными
условиями ее эксплуатации;
·
важнейшим
свойством ошипованной шины является схема расположения шипов на протекторе.
Все вышеперечисленное явилось исходными
предпосылками для разработки цели выпускной квалификационной работы: повышении эксплуатационной
эффективности зимних ошипованных шин.
Для достижения этой цели были обозначены
следующие основные задачи:
1. разработка
методики исследования усталостных процессов происходящих в динамической системе
«шип - эластомер»;
2. разработка
конструкции лабораторного оборудования для проведения исследований;
3. проведение
исследований для 3 моделей шипов. Анализ результатов
4. разработка
критериев оптимизации схемы размещения шипов на протекторе шины;
5. разработка
программы по оптимизации расстановки шипов противоскольжения на протекторе
шины.
2. Методика лабораторного
исследования износа в системе «ШИП - ПРОТЕКТОР ШИНЫ»
Эксплуатационная надежность ошипованной шины
(один из показателей качества шипованных шин) - способность шины выполнять свои
функции, сохраняя свои эксплуатационные параметры в установленных пределах в
течение определенного срока эксплуатации при условии соблюдения режимов и
условий использования, технического обслуживания, хранения и транспортировки.
Надежность ошипованной шины, как и любой другой системы, является комплексным
показателем, включающем в себя ряд свойств: безотказность, долговечность,
ремонтопригодность и т.д.
Нарушение работоспособности ("отказ")
- изменение эксплуатационных параметров ошипованной шины, внезапное или
постепенное, выходящее за рамки установленных пределов.
Рассмотрим более подробно количественные
показатели надежности шипованных шин. Вероятность безотказной работы можно
выразить формулой:

где: e - основание натурального логарифма;
lcx -
интенсивность отказа шипов (или шипованной шины);- заданное время работы шины.
Интенсивность отказа шипованной шины зависит от
интенсивности отказа в работоспособности отдельных шипов. Однако, если не
принимать во внимание разброс технических показателей работы шипов
(наклоняемость, усилие прокола и т.д.), в пределах одной шины, и считать их
постоянными, тогда интенсивность отказа шины можно рассмотреть как отказ
единичного изделия, а не системы:
lизд. =l шип +l
пос, (2.2)
где lшип - интенсивность
отказа шипов на шине;
lпос - интенсивность отказа посадки под шип.
Интенсивность отказа шипов зависит от
конструкции, качества изготовления, от эксплуатационных нагрузок, а также от
характеристик посадки шипа в выступ протектора. Коэффициент общих нагрузок на
шип определяет степень нагруженности:
Кp = P/Pmax
где: P - рабочая нагрузка на шип;- максимально
допустимая нагрузка на шип.
Рабочая нагрузка на шип зависит не только от
динамики движения автомобиля, но и от характеристик посадки шипа в протектор
шины, от его жесткости посадки. От жесткости посадки шипа Cу зависит насколько
будут интенсивными рабочие нагрузки на шип и на материал протектора шины.
Следует предположить, что существует определенное оптимальное значение
жесткости посадки шипа Cопт, при которой система шип - протектор имеют
максимальную наработку на отказ, при сохранении эксплуатационных характеристик
шины.
Коэффициент жесткости посадки:
Кc = Cопт/C
С возрастанием жесткости посадки, по сравнению с
оптимальным значением (Кc > 1), увеличивается рабочая нагрузка на шип и на
материал протектора, что в свою очередь увеличивает износ как шипа, так и
материала, прилегающего к шипу. С уменьшением жесткости посадки (Кc < 1), с
одной стороны, уменьшаются нагрузки на систему шип - эластомер, с другой
стороны, вероятность достижения критически малой жесткости посадки, при которой
полностью нарушается работоспособность шипа (утапливание, залегание),
возрастает.
.1 Анализ причин нарушения
работоспособности шипов в шине
Нарушение работоспособности ошипованной шины
происходит вследствие выпадения, ослабления посадки, залегания, утапливания,
износа или разрушения шипов. Это происходит по многим причинам, в частности в
связи с усталостным и абразивным износом стенок отверстия, старением материала
протектора, коррозионным и абразивным разрушением корпуса шипа и его
твердосплавной вставки и др. Установлено, что могут иметь место следующие
проблемы [5]:
• выпадение шипов из протектора шины;
• поворот шипа в отверстии на угол до
65°;
• утапливание шипа в протектор шины;
• повышенный износ вставки или корпуса
шипа.
Таблица 2. Причины нарушения работоспособности
("отказа") шипов
|
Выпадение
|
Ослабление
|
Залегание
|
Утапливание
|
Разрушение
|
|
1
|
2
|
3
|
4
|
5
|
|
Износ
стенок резины 
|
Износ
корпуса шипа 
|
Недостаточные
упругие силы для возв. шипа в исходное положение 
|
Разрыв
протектора в зоне отверстия 
|
Тяжелые
условия работы вследствие избыточного "усилия прокола" 
|
|
1
|
2
|
3
|
4
|
5
|
|
Усталостное
разрушение стенок отверстия - следствие повыш. амплитуды наклонов шипа.
Результат - разрывы резины.
|
Повышенная
коррозионная активность материала корпуса шипа.
|
Нес.
диаметра отв., диам. шипа и свойств мат. протектора
|
Несоот.
диаметра отверстия, диам. верхнего фланца шипа и свойств матер. протектора
|
Недостаточная
глубина отверстия
|
|
Усталостное
разрушение стенок отверстия - следствие повышенных исходных раст. напряжений.
Результат - разрывы резины.
|
Недостаточно
надежная антик. защита корпуса шипа
|
Износ
материала стенок гнезда
|
Усталостное
разрушение материала донной части отверстия
|
Недостаточная
толщина подканавочного слоя.
|
|
Абр.
износ стенок отверстия - след. Поп. абраз. частиц в гнездо шипа и пов.
исходных растяг. напряжений. Результат - истирание резины.
|
Пов.
абразивный износ защ. слоя вследствие попадания абраз. частиц в гнездо шипа.
|
Износ
корпуса шипа
|
Истирание
материала донной части отверстия
|
|
|
Сн.
эласт. Мат. стенок отверстия - след. струк. изменений в результате перегрева.
|
Нар.
усл. Лет. хран. ошип. шины
|
|
|
|
|
Разр.
стенок отверстия - следствие гидродин. эффектов, возн. в процессе
эксплуатации ошип. шины. Результат - микроразрывы резины.
|
|
|
|
|
Все перечисленные выше дефекты нарушения
нормальной работоспособности шипа, в процессе эксплуатации ошипованной шины,
непосредственно связано с двумя взаимосвязанными факторами: состоянием шипа и
состоянием упругой связи в месте посадки шипа в отверстие выступа протектора.
Анализ дефектов шипованных шин показывает, что в большинстве случаев критичным
в этой взаимосвязанной системе является прочность посадки шипа. Так как
крепление шипа в протекторе шины осуществляется за счет сил вызванных упругой
деформацией материала протектора, любые нагрузки на шип непосредственно
воспринимаются материалом протектора, и вызывают в нем механическое нарастание
напряжений. Кроме того, в процессе работы ошипованной шины, присутствуют
перемещения шипа относительно прилегающего материала, вызывая механический
износ, как шипа, так и износ стенок.
Физико-механические процессы износа, протекающие
в месте посадки шипа при его работе, условно можно разделить на три группы.
• Абразивно-фрикционный износ протекторной резины.
• Усталостный износ.
• Тепло-химический износ.
Эти процессы износа резины взаимосвязаны.
Абразивный износ, сопровождающийся истиранием резины с образованием микротрещин
и царапин, усиливает усталостный. Под воздействием температурных полей изменяются
механические свойства полимерного материала протектора, что также сказывается
на износ.
Упругую жесткость посадки шипа в отверстие
выступа протектора косвенно отражают три общепринятые технические
характеристики шипованной шины (рисунок 10) [6].
1. Усилие прокола - осевое усилие,
направленное на вдавливания шипа в массив резины.
2. Усилие вырывания шипа - минимальное
осевое усилие, необходимое для вырывания шипа из протектора шины.
. Наклоняемость шипа - способность шипа
наклоняться в рабочей плоскости под воздействием тангенциальных усилий.
Рисунок 10. Условные обозначения характеристик
посадок шипов: а) усилие прокола; б) усилие выдергивания; в) наклоняемость шипа
Напряженно-деформированное состояние материала
протектора непосредственно влияет на значение этих трех характеристик. Однако
величина усилия прокола в большей степени зависит не от
напряженно-деформированного состояния, а от расстояния от верхнего фланца шипа
до корда, так называемый подфланцевый слой [7].
Характеристика, связанная с усилием вырывания
шипа, свободна от данного недостатка, но замер этого параметра сопряжен с
разрушением посадки шипа, что недопустимо для условий проводимого эксперимента.
В связи с этим оставшийся параметр, наклоняемость шипа под действием
тангенциальных нагрузок, был принят в качестве критерия, характеризующего
величину упругих связей в системе «шип - эластомер».
На этапе подготовки и планирования эксперимента
теоретически можно выделить, и оценить количественно, два уровня значений
упругой жесткости посадки шипа: максимальный - это жесткость посадки шипа, при
которой возникающие напряжения максимально приближенны к критическим
(напряжения разрыва); и минимальный - это такая жесткость, при которой шип
теряет свою работоспособность в начале эксплуатации.
Целью эксперимента является выявление
оптимальной величины жесткости посадки шипа, при которой шип, в процессе
эксплуатации, максимально долго сохраняет свою работоспособность.
2.2 Разработка методики
лабораторного эксперимента
Для моделирования в лабораторных условиях
усталостных процессов происходящих в динамической системе «шип - эластомер»
необходимо разработать имитационно-измерительный стенд, позволяющий
моделировать работу упругого соединения «шип - эластомер» и контролировать его
текущее состояние.
Согласно поставленным условиям была разработана
функциональная кинематическая схема имитационно-измерительного стенда, которая
показана на рисунке 11. Стенд состоит из двух независимых кинематических цепей:
измерительной - изображенной серым цветом и имитационной - изображенной черным
цветом. Каждая цепь состоит из низших кинематических пар и жестких звеньев,
образующих плоские механизмы, моделирующий кинематику работы шипа и механизм
контроля жесткости посадки.
Рисунок 11. Функциональная
кинематическая схема имитационно-измерительного стенда
Значение угла между вертикальной осью шипа и
условной нормали к поверхности протектора в процессе соприкосновения с дорожным
полотном изменяется от 0 (в начальный момент контакта), доходит до
максимального значения и принимает 0 в конце контакта (рисунок 12). Такое
циклическое колебание шипа, относительно выступа протектора, происходит при
каждом обороте шины. Зная диаметр автомобильного колеса можно, сопоставить
пробег автомобиля и количество циклических движений шипа Nцикл.
 ,
,
где T - пробег автомобиля, тыс. км;кол - диаметр
колеса, м.
Рисунок 12. Кинематическое движение шипа
относительно выступа протектора шины
Максимальный угол отклонения шипа зависит от
двух основных факторов, во-первых, от величины возмущающей (полезной или
рабочей) силы, а во-вторых, от упругой жесткости системы «шип - эластомер».
Величина возмущающей силы зависит:
• от размеров твердосплавной вставки;
• от типа дорожного полотна;
• от режима движения автомобиля.
Упругость системы шип - резина, в свою очередь,
зависит:
• от формы выступа протектора;
• от физико-механических свойств протекторной
резины;
• от формы и размеров шипа;
• от технологических параметров процесса
ошиповки;
В реальных условиях на шип действует возмущающая
сила, которая изменяет положение шипа в выступе протектора, а величина угла его
наклона зависит от жесткости упругой связи шип - эластомер. Однако лабораторная
реализация подобной модели затруднена техническими проблемами, возникающими при
изготовлении стенда. Для упрощения конструкции лабораторно - имитационного
стенда примем ряд ограничений на лабораторную модель:
1. Макет шипа циклически отклоняется от
вертикали на фиксированный угол;
2. Возмущающая сила отклонения макета шипа
зависит от упругой связи шип - резина;
. Временной период цикла значительно
меньше, чем в реальных условиях;
. Циклические отклонения макета шипа
происходят в одной плоскости, в отличие от реальных условий, где шип совершает
движения по образующей телесного угла.
Вышеперечисленные ограничения и допущения,
накладываемые на лабораторную модель «шип - эластомер», с одной стороны
отдаляют ее от реальной ситуации, однако, с другой стороны, позволяют проводить
эксперименты по выявлению усталостного износа материала протектора от работы
шипа.
Контроль жесткости посадки осуществляется путем
нагружения макета шипа горизонтальной силой Р и замером угла отклонения оси
макета шипа от условной нормали к поверхности образца протекторной резины
(рисунок 13). Средняя величина угла отклонения a
характеризует податливость посадки макета шипа. В качестве угловой жесткости
(Су) принимаем обратную величину податливости:
где a - угол отклонения
оправки, рад;
P - нагружаемая сила, Н;- плечо силы P, м.
Рисунок 13. Способ замера жесткости посадки шипа
в системе «шип-резина»
При таком способе замера и оценке упругости
соединения шип - эластомер возникает методическая погрешность, вызванная
изменением длины плеча в зависимости от угла наклона макета шипа (l≠l1).
На схеме замера видно (см. рисунок 13), что с увеличением угла наклона
уменьшается эффективный рычаг, это приводит к уменьшению момента сил.
Пренебрегать данным фактом нельзя, так как величина угла отклонения оси оправки
от горизонтали может доходить до 250 и более, что заметно уменьшает длину
эффективного рычага (на 7% и более). Это приводит к тому, что увеличение
податливости на 10 при угле, скажем, в 150 неэквивалентно такому же увеличению
податливости, но при угле в 200. Для устранения этой погрешности замера,
связанной с кинематическим изменением длины эффективного рычага, а также для
упрощения обработки результатов эксперимента необходимо откорректировать
угловую жесткость посадки шипа.
Легко заметить, что длина рычага изменяется по
косинусоидальному закону, и может рассчитываться по формуле:
где l - размер между условной осью поворота
шипа и канавкой для крепления груза, м;
a - угол отклонения макета шипа, рад.
На графике, изображенном на рисунке 14, серым
цветом показано изменение длины эффективного рычага в зависимости от угла
наклона. Изменение длины рычага, при сохранении постоянной нагрузки,
пропорционально изменению изгибающего момента, действующего на макет шипа, поэтому
график на рисунке 14 можно представить как график изменения крутящего момента
от угла наклона. Для приведения измеренного угла наклона оправки к углу,
возникающему при действии постоянного изгибающего момента (черная линия на
графике), с постоянной работой сил сопротивления, необходимо воспользоваться
законом о сохранении энергии.
Рисунок 14. График изменения длины эффективного
рычага от угла наклона макета шипа
Площадь фигуры, ограниченная с одной стороны,
осями координат, а с другой графиком функции, численно равна затраченной работе
А по наклону оправки с шипом, и подсчитывается по известной формуле:
 , Дж
, Дж
где MН - начальный изгибающий момент, Нм;
a - угол отклонения оправки, рад;
С1 - постоянная интегрирования, для данного
случая при начальных условиях a = 0, A = 0, С1 = 0.
Если воспользоваться следующим предположением:
изгибающий момент на всей траектории движения постоянен и равен начальному, а
затраченная работа по перемещению макета шипа (работа сил сопротивления) равна
работе подсчитанной по формуле (2.8), то условный откорректированный угол
отклонения можно рассчитать по формуле:

Из формулы (2.9) следует, что откорректированный
угол поворота оправки αкор, в
радианах, численно равен синусу данного угла, отсюда формула для подсчета
откорректированной жесткости посадки окончательно примет вид:
Откорректированный (или линейный) коэффициент
жесткости посадки шипа - это безразмерная величина, численно равная обратной
величине синуса угла отклонения макета шипа.
Количество циклов совершаемых макетом шипа
должно быть сопоставлено с реальной долговечностью шипа, определяемой пробегом
автомобиля с шипованными шинами. Так средний срок службы легковых шипов не
превышает 20 - 30 тыс. км. Отсюда по формуле (2.5) количество циклических
движений шипа составляет 10 - 15 млн. циклов. Следует учесть, что при
проведении лабораторного эксперимента, работа макета шипа происходит в более
благоприятных условиях, чем в реальной шине. Отсюда проектное число циклов
следует увеличить в 1.5 - 2 раза, что составит около 25 млн. циклов.
Период циклических движений шипа в реальных
условий, для средней скорости автомобиля 50 км/ч, составляет ~ 0,012 сек. Таких
скоростей в лабораторных условий добиться чрезвычайно тяжело. По этой причине
частота возвратно-поступательных движений макета шипа принимается максимально
возможной.
Для нашего исследования были выбраны шипы фирм
Ugigrip и Scason. Модели: UGIGRIP 8-10-1, SCASON MR-11, UGIGRIP U8-10-2
(рисунок 15).

Рисунок 15. Шипы фирм-производителей: а) UGIGRIP
8-10-1; б) SCASON MR-11; в) UGIGRIP U8-10-2
Практика применения этих шипов показывает
некоторые преимущества шипов фирмы Ugigrip по сравнению с шипами фирмы Scason.
Конструктивный элемент в виде небольшого пояска (см. рисунок 15 в)
предотвращает попадание абразивных частиц к корпусу шипа, что позволяет
продлить срок службы.
Для моделирования усталостных процессов
происходящих в динамической системе «шип - эластомер» была приобретена шина
175/70/R13 82T
Я-620 MEDVED (рисунок
16).

Рисунок 16. Протектор шины 175/70/R13
82T Я-620 MEDVED
В качестве рабочих объектов эксперимента будут
использоваться: макет шипа (рисунок 17) - рабочая часть которого полностью
повторяет форму корпуса однофланцевого шипа; массив протекторной резины
(рисунок 18) - моделирующий выступ протектора.
Рисунок 17. Эскиз макета шипа
Рисунок 18. Цилиндрический массив резины
Известно, что износ стенок отверстия протектора,
в котором установлен шип, ускоряется при эксплуатации ошипованной шины в
осенний и весенний периоды при положительных температурах и сухом дорожном
покрытии.
С учетом предположения, что износ резины в этих
условиях в значительной степени связан с термическими и механическими
процессами, для исследований применена ускоренная методика. Шип, запрессованный
в отверстие определенного размера, будет совершать в образце протектора
реальной шины колебательные (возвратно-поступательные) движения с частотой 1380
мин-1 непрерывными циклами с заданными промежутками времени.
Замеры угловой жесткости посадки шипа будут
проводиться периодически (после остановки стенда и выдержки в течение 12
часов), а контроль температуры резины в зоне контакта с шипом - постоянно.
Методика подготовки образцов и проведения
исследования:
. Из ошипованной шины 175/70/R13
82T Я-620 MEDVED
будут извлекаться все шипы и вырезаться 3 образца протектора (по одному на
каждый исследуемый шип) для проведения имитационного исследования по износу
отверстия шипом противоскольжения.
. В корпусах шипов с торца верхнего фланца
сверлится отверстие, через которое удаляется твердосплавная вставка.
. Затем в полученное сквозное отверстие
вклеивается ось, с помощью которой шип будет закрепляться в специальной оправке
на имитационном стенде (рисунок 17).
. Шип запрессовывается в вырезанный из шины
образец протектора. Проводится выдержка образца с запресованным в него макетом
шипа не менее 12 часов при температуре окружающего воздуха не менее 15°
. Образец протектора с запрессованным в него
макетом шипа будет устанавливаться и закрепляться на имитационном стенде.
Производится определение жесткости посадки шипа в исходном состоянии (без
износа отверстия)
. Проводится испытание согласно установленным
интервалам времени. В процессе работы стенда постоянно контролируется температура
в рабочей зоне.
. После каждого цикла работы стенд будет
останавливается. После остановки стенда и выдержки в течение 12 часов
производится определение жесткости посадки шипов при исходных крутящих моментах
М1- 0,04 Н∙м и М2- 0,08 Н∙м.
. Затем полученные данные заносятся в таблицы,
анализируются и строятся графические зависимости.
3. Разработка конструкции
лабораторного оборудования для проведения исследований
Функциональная кинематическая схема
имитационно-измерительного стенда показана на рисунке 11. Стенд состоит из двух
независимых кинематических цепей: измерительной - изображенной серым цветом и
имитационной - изображенной черным цветом. Каждая цепь состоит из низших
кинематических пар и жестких звеньев, образующих плоские механизмы,
моделирующий кинематику работы шипа и механизм контроля жесткости посадки.
Имитационная часть стенда представляет собой
кривошипно-шатунный механизм, работающий следующим образом. Вращающий момент с
вала электродвигателя 1 посредствам кривошипно-шатунного механизма 2,3 передается
на качалку 4, придавая ей возвратно-колебательное движение. Частота
возвратно-колебательных движений равняется частоте вращения вала
электродвигателя. При помощи подвижного шарнира 5 к качалке закреплен имитатор
шипа 6. Нижняя часть которого представляет собой геометрическую копию шипа
противоскольжения, запрессованного в отверстие массива протекторной резины 7.
Степень подвижной свободы имитатора шипа ограничена верхним шарниром (низшая
кинематическая пара) и упругой связью реакции протекторной резины. Тем самым
достигается жесткая стабилизация угла отклонения имитатора шипа от вертикали в
обе стороны, а мгновенная ось поворота имитатора шипа устанавливается в
зависимости от состояния упругой реакции протекторной резины. Кроме того, так
как нижний шарнир качалки, к которому прикреплен макет шипа, совершает дуговое
возвратно-поступательное движение, по мере приближения качалки к исходному
положению (качалка и макет шипа вертикальны), макет шипа вдавливается в массив
резины (рисунок 19).

Рисунок 19. Кинематическое движение макета шипа
Измерительная часть стенда работает следующим
образом (см. рисунок 11). Груз 11 весом Р при помощи тонкой нерастяжимой нити 9
через неподвижный блок 10 прикреплен к верхнему шарниру макета шипа, на жестко
фиксированном расстоянии от его нижнего фланца. В плоскости поворота макета
шипа установлен измеритель угла 8. Фиксация углового измерителя, относительно
стенда, осуществляется путем совмещения нулевой отметки с относительной осью поворота
(приблизительно 2 мм от верхнего фланца макета шипа) и вертикальной нулевой
линии измерителя с осью ненагруженного макета шипа.
3.1 Конструкция стенда
Общий вид стенда и его компоновка представлены
на рисунке 20 и рисунке 21. К раме 1 закрепляется электродвигатель 17, с
помощью винтов 16. На вал электродвигателя насаживается кривошип 3 и
фиксируется поперечной шпонкой 10. На ось кривошипа запрессовывается подшипник
4 в корпусе 5. Осевая фиксация подшипника осуществляется с помощью пружинной
шайбы 10. К корпусу подшипника с помощью винтов 10 прикрепляется шатун 6. На
внешней стороне рамы 1 винтами 10 устанавливается ось качалки 7. На ось
одевается качалка 8 и фиксируется там шайбами и шплинтами 10.
Рисунок 20. Компоновка
имитационно-измерительного стенда
На основании рамы устанавливается стакан 9 с
резиновым образцом 11. В отверстие резинового образца запрессовывается макет
шипа 10. Шатун, качалка и макет шипа шарнирно соединяются между собой при
помощи осей 10, шайб 10 и шплинтов 10.

Рисунок 21. Внешний вид стенда
Технические требования к конструкции стенда и к
его комплектующим, обусловленные спецификой работы механизма:
·
шарнирные
соединения подвижных звеньев должны обеспечить постоянство, в пределах
допустимых отклонений, посадок сопрягаемых деталей, во всем пределе времени
проведения эксперимента (~ 4000 ч);
·
конструкция
стенда должна обеспечивать безотказную непрерывную работу в течение хода
эксперимента;
·
привод
должен обладать 4х-5и кратным запасом по мощности;
·
конструкция
стенда должна обеспечивать необходимый уровень электро-, пожарной и прочей
безопасности.
·
Технические
характеристики стенда:
·
Мощность
электродвигателя, кВт 0,25
·
Частота
вращения электродвигателя, мин-1 2500
·
Частота
возвратно-поступательного движения макета шипа, мин-1 2500
·
Угол
отклонения макета шипа от вертикали, рад 0,44
·
Величина
вдавливания шипа в резину, мм 0 - 4
·
Максимальный
угол отклонения макета шипа при замере, рад 0,69
·
Габаритные
размеры стенда, высота * ширина * толщина, мм 220*260*310
3.2 Последовательность подготовки
стенда к проведению опыта
Для подготовки стенда к проведению серии опытов
проводимого эксперимента необходимо выполнить следующие действия:
·
закрепить
образец испытуемой резины в специальный стакан;
·
по
центру образца просверлить необходимых размеров отверстие;
·
запрессовать
в полученное отверстие макет шипа;
·
соединить
макет шипа и качалку осью и зафиксировать положение оси шайбами и шплинтом;
·
выставить
кривошип в нулевое положение, посредствам совмещения меток;
отрегулировать положение крепления качалки до
совмещения оси качалки с вертикалью (рисунок 22).
а) Регулировка величины вдавливания макета шипа
б) Регулировка осевого зазора в подшипниковом
узле
в) Настройка стенда на замер наклоняемости
г) регулировка положения оси качалки
Рисунок 22. Регулировка и настройка стенда
Последовательность проведения замера жесткости
посадки макета шипа:
·
отключить
питание электродвигателя;
·
расшплинтовать
ось крепления качалки и освободить макет шипа;
·
для
снятия остаточных напряжений оставить образец с макетом шипа в свободном
положении в течение 5 - 10 минут;
·
далее
закрепить конец нагружаемой нити в специальном отверстии макета шипа;
·
нагрузить
макет и произвести замер с помощью специального угломера.
Таким образом, методика проведения исследования
будет следующая:
. Из ошипованной шины 175/70/R13
82T Я-620 MEDVED
будут извлекаться все шипы и вырезаться 3 образца протектора (по одному на
каждый исследуемый шип) для проведения имитационного исследования по износу
отверстия шипом противоскольжения (рисунок 23, 24).

Рисунок 23. Шина 175/70/R13
82T Я-620 MEDVED
с извлеченными шипами
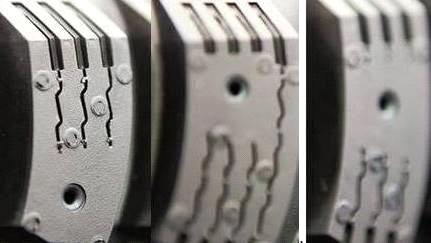
Рисунок 24. Образцы протектора
. В корпусах шипов с торца верхнего фланца
сверлится отверстие, через которое удаляется твердосплавная вставка.
. Затем в полученное сквозное отверстие
вклеивается ось (см. рисунок 17), с помощью которой шип закрепляется в
специальной оправке на имитационном стенде.
. Шип запрессовывается в вырезанный из шины
образец протектора. Проводится выдержка образца с запресованным в него макетом
шипа не менее 12 часов при температуре окружающего воздуха не менее 15°С
(рисунок 25).

Рисунок 25. Макет, запрессованный в отверстие
протектора
. Образец протектора с запрессованным в
него макетом шипа устанавливается и закрепляется на имитационном стенде.
Производится определение жесткости посадки шипа в исходном состоянии (без
износа отверстия) (рисунок 26).

Рисунок 26. Измерение угла наклона макета шипа
до стендовых испытаний
.
Проводится испытание согласно установленным интервалам времени. В процессе
работы стенда постоянно контролируется температура в рабочей зоне (рисунок 27).

Рисунок 27 - Контроль температуры в рабочей зоне
После каждого цикла работы стенд
останавливается. После остановки стенда и выдержки в течение 12 часов
производится определение жесткости посадки шипов при исходных крутящих моментах
М1- 0,04 Н∙м и М2- 0,08 Н∙м (рисунок 28).

Рисунок 28 - Измерение угла наклона макета шипа
после стендовых испытаний
8. Данные заносятся в таблицы, анализируются и
строятся графические зависимости.
3.3 Планирование лабораторного
эксперимента
При проведении эксперимента с помощью
лабораторного имитационно-измерительного стенда продолжительность одного опыта,
с учетом непрерывной работы стенда, составляет, примерно, 140 часов. По этой
причине проведение эксперимента сопряжено с большими временными затратами. Для
уменьшения времени эксперимента, а также для упрощения обработки полученных
экспериментальных данных необходимо произвести предварительное планирование
эксперимента методом априорного ранжирования.
Перечислим предполагаемые факторы, влияющие на
усталостный износ сопряжения «шип - эластомер»:
- первоначальные напряжения в посадке шипа;
- свойства резиновой смеси;
- конструкция шипов;
- конфигурация выступа протектора;
- интенсивность и амплитуда
возмущающих колебательных движений.
Существование стандартной методики определения
усталостной прочности при многократном симметричном знакопеременном изгибе
позволяет сделать вывод об усталостной выносливости протекторной резины
различного состава. Следовательно, можно сделать вывод о том, что чем выше
усталостная выносливость образца протекторной резины, определенная стандартной
методикой, тем она выше и в сопряжении «шип - эластомер».
Также при проведении исследования необходимо
учесть, что физико-механические свойства материала протектора и формы выступа
протектора влияют на жесткость посадки шипа (величина его наклоняемости под
действием тангенциальной нагрузки). Вследствие чего фактор формы выступа
протектора принимается как фактор, увеличивающий усталостную выносливость при
уменьшении жесткости выступа. То есть, усталостная выносливость сопряжения «шип
- эластомер», определенная в условно бесконечном массиве материала (образец
много больше, чем макет шипа), является минимальной для данной посадки. Любое
изменение конфигурации выступа протектора, при сохранении прочих исходных
данных, повлечет только увеличение усталостной выносливости, за счет
собственной деформации выступа.
Интенсивность и амплитуда возмущающих колебаний
макета шипа в значительно меньшей степени влияет на процесс усталостного
разрушения, чем общее количество возвратно - поступательных движений. Поэтому
амплитуда колебаний определяется конструктивными особенностями стенда, и ограничена
возникающими максимальными напряжениями в посадке шип - резина. Интенсивность
колебаний обусловлена и ограничена техническими характеристиками лабораторного
стенда. Она равна 41 колебание в секунду.
Таким образом, предварительное планирование эксперимента
основано на следующих допущениях и предположениях.
1) Все
образцы цилиндрического массива резины, применяемые в данном эксперименте,
изготавливались из одинакового материала. Стандартная характеристика материала
- усталостная выносливость при знакопеременном изгибе, - полностью отражает
влияние физико-механических свойств эластомеров на характеристику усталостного
разрушения пристеночного слоя в системе «шип - эластомер».
2) Влияние
на усталостный износ размеров поперечного профиля выступа протектора (для
условий лабораторного эксперимента это размеры цилиндрического массива)
обусловлено только изменением общей угловой жесткости посадки шипа.
3) Влияние
формы корпуса шипа сведено к диаметру корпуса шипа dкш,
диаметру фланца dш.
Если в качестве критерия принять угловую
жесткость посадки шипа, то в качестве управляющего входного фактора можно
принять технологически изменяемый фактор - диаметр отверстия под шип.
4. Результаты экспериментальных
исследований и их анализ
Экспериментальный стенд позволяет осуществить
имитацию работы шипа в шине и контролировать изменения жесткости посадки шипа.
При этом основным критерием контроля жесткости посадки в системе «шип -
эластомер», а значит и критерием усталостного разрушения пристеночного слоя
материала протектора, является величина угловой жесткости макета шипа.
Согласно разработанной методики в главе 2
получили следующие результаты экспериментов:
Шип UGIGRIP 8-10-1 (рисунок 29,30,31,32):
Таблица 3. Угловая жесткость посадки шипа Су,
[1/рад] при исходных моментах М1 и М2, [Н∙м]
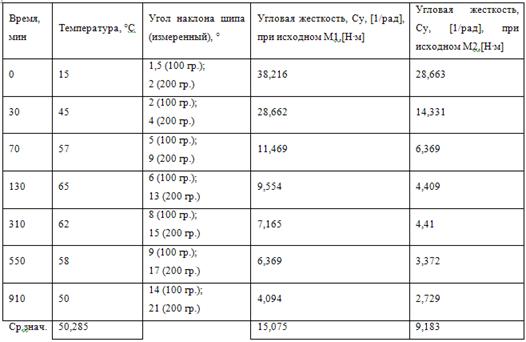
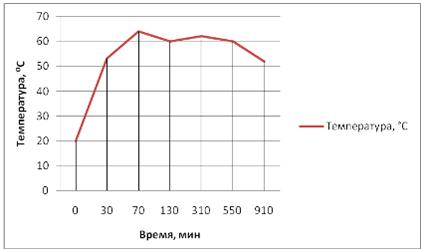
Рисунок 29. Изменение температуры
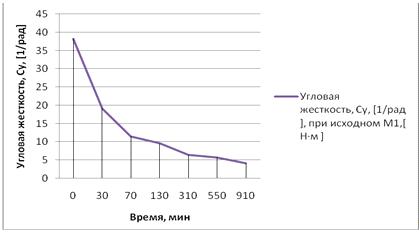
Рисунок 30. Угловая жесткость Су при исходном М1
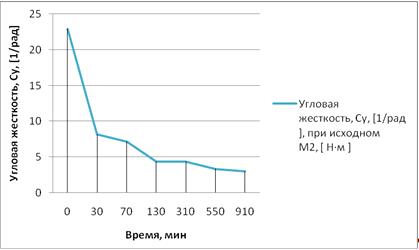
Рисунок 31. Угловая жесткость Су при исходном М2

Рисунок 32. Разрез образца протектора после
исследования
Шип SCASON MR-11 (рисунок 33, 34, 35, 36):
Таблица 4. Угловая жесткость посадки шипа Су,
[1/рад] при исходных моментах М1 и М2, [Н∙м]
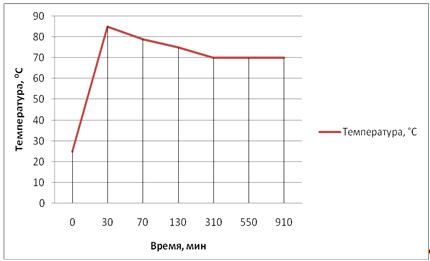
Рисунок 33. Изменение температуры
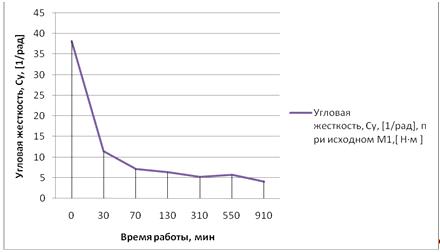
Рисунок 34. Угловая жесткость Су при исходном М1
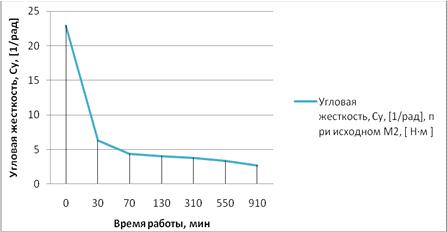
Рисунок 35. Угловая жесткость Су при исходном М2
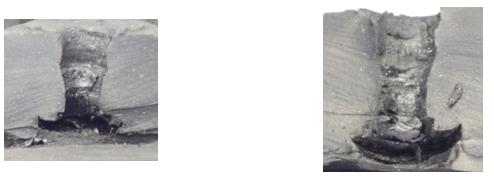
Рисунок 36. Разрез образца протектора после
исследования
Шип UGIGRIP U8-10-2 (рисунок 37,38,39,40):
Таблица 5. Угловая жесткость посадки шипа Су,
[1/рад] при исходных моментах М1 и М2, [Н∙м]
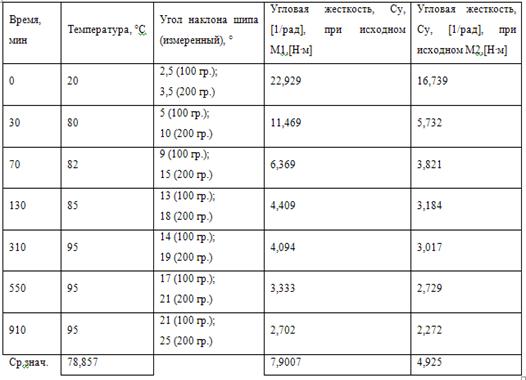
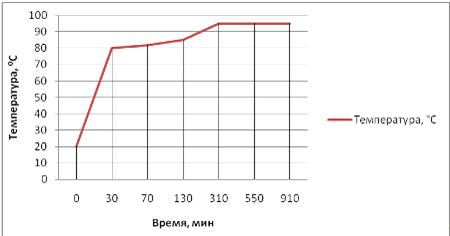
Рисунок 37. Изменение температуры
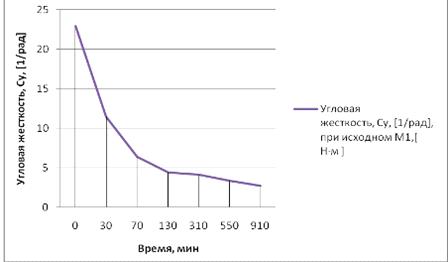
Рисунок 38. Угловая жесткость Су при исходном М1
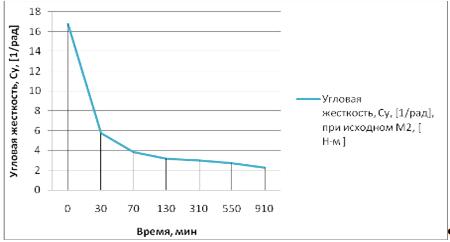
Рисунок 39. Угловая жесткость Су при исходном М2

Рисунок 40. Разрез образца протектора после
исследования
Таблица 6. Среднее значение угловой жесткости Су
при исходных моментах М1 и М2 по моделям шипов.
|
Модель
шипа
|
Среднее
значение угловой жестк., Су, [1/рад], при М1, [Н∙м]
|
Среднее
значение угловой жесткости, Су, [1/рад], при М2, [Н∙м]
|
|
UGIGRIP
8-10-1
|
15,075
|
9,183
|
|
SCASON
MR-11
|
11,224
|
6,817
|
|
UGIGRIP
U8-10-2
|
7,9007
|
4,925
|
Итоговые графики среднего значения угловой
жесткости Су при исходном М по моделям шипа
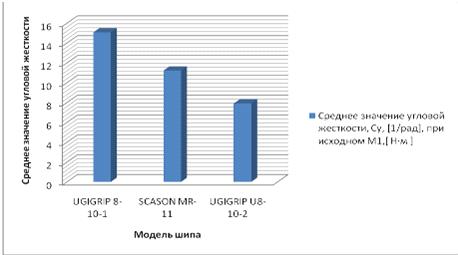
Рисунок 41. Среднее значение угловой жесткости,
Су, [1/рад], при исходном М1,[Н∙м]
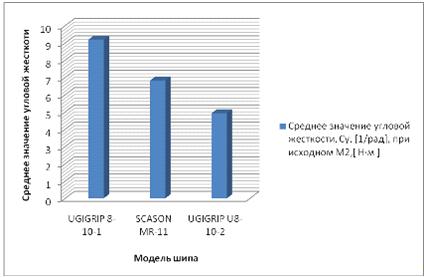
Рисунок 42. Среднее значение угловой жесткости,
Су, [1/рад], при исходном М2,[Н∙м]
Таблица 7. Среднее значение температуры по
моделям шипов.
|
Модель
шипа
|
Среднее
значение температуры, ⁰ С
|
|
UGIGRIP
8-10-1
|
78,857
|
|
SCASON
MR-11
|
67,714
|
|
UGIGRIP
U8-10-2
|
50,285
|
Итоговый график среднего значения температуры по
моделям шипов, ⁰С
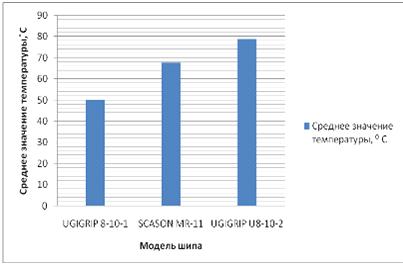
Рисунок 43. Среднее значение температуры по
моделям шипов
4.1 Анализ полученных результатов
В результате данного исследования было
установлено, что на износ отверстий большое влияние оказывают форма и размеры
шипов. Также было подтверждено предположение о том, что при повышенных исходных
напряжениях резины износ стенок отверстий происходит более интенсивно.
Соответственно, температурный фон в зоне контакта выше.
Относительно лучшие результаты по износу
отверстий (меньше разрывов на стенках отверстия от фланцев шипа) показал шип
модели UGIGRIP 8-10-1 (рисунок 32).
Среднее значение угловой жесткости Су при
исходных моментах М1 и М2 у данного шипа составила 15,075 и 9,183
соответственно при средней температуре 50,285⁰С
(рисунок 41,42).
При установке шипа Scason
MR-11 износ системы
увеличился по сравнению с шипом модели UGIGRIP 8-10-1. Средняя температура
стенок отверстий в процессе эксперимента (при одинаковых условиях) увеличилась
примерно на 24% (рисунок 43), а угловая жесткость посадки шипа при исходных
моментах М1 и М2 после испытаний оказалась ниже на 34% (рисунок 41,42).
По результатам исследования наиболее низкие
показатели получились у шипа модели UGIGRIP U8-10-2
(рисунок ). Это связано с тем, что из-за наличия острых кромок на фланцах и
избыточной исходной жесткости посадки происходит увеличение температуры (до 78⁰С)
и интенсивным разрушением отверстия (рисунок 37, 40). Среднее значение угловой
жесткости Су при исходных моментах М1 и М2 у данного шипа составила 7,9007 и
4,925 соответственно (рисунок 41,42).
5. Разработка алгоритма оптимизации
схемы размещения шипов на протекторе шины
.1 Разработка критериев оптимизации
схемы ошиповки
Оптимизация - процесс нахождения наилучшего или
оптимального решения какой-либо задачи (набора параметров) при заданных
критериях. Характеризуя объект, сложно выбрать такой один критерий, который бы
обеспечил всю полноту требований. А стремление к всеобъемлющему решению и
назначение большого числа критериев сильно усложняет задачу. Поэтому в разных
задачах количество критериев может быть различным. Задачи однокритериальной
оптимизации (с одним критерием оптимизации) иногда называют скалярными, а
многокритериальной - векторной оптимизации. Кроме того, количество параметров,
характеризующих оптимизируемый объект (задачу), также может быть различным,
причём параметры могут меняться непрерывно или дискретно (дискретная
оптимизация).
Сведение задачи к однокритериальной требует
введения существенных допущений, но облегчает окончательный выбор [8].
Оптимизационные задачи активно используются там,
где важно получение высокоэффективного результата.
Как правило, решение оптимизационной задачи
распадается на следующие этапы:
· анализ исходных данных и формулировка задачи;
· определение параметров решения,
подлежащих оптимизации (то есть тех, которые могут быть изменены в ходе
решения);
· установление допустимой области
существования параметров, то есть ограничений, налагаемых на параметры и их
сочетания;
· выбор и оценка влияния внешних
факторов, учитываемых в ходе решения;
· выбор критериев оптимальности;
· построение целевой функции
(математической модели), которая выдавала бы показатели, соответствующие
выбранным критериям;
· выбор математического метода
оптимизационных расчётов;
· проведение расчётов и оценка
полученных решений по выбранным критериям;
· окончательное принятие решения с
учётом неопределённости и риска.
Следует подчеркнуть, что оптимизация в отличие
от обычного сравнения вариантов предполагает рассмотрение всех решений,
попадающих в область допустимых значений параметров. Те решения, в процессе
поиска которых не проводился полный просмотр возможных вариантов, обычно
называют «рациональными».
.2 Обоснование метода решения оптимизационной
задачи расстановки шипов на протекторе шины
Для решения задачи оптимального размещения шипов
на протекторе шины на первый взгляд кажется, что применим алгоритм
многокритериальной оптимизации с анализом всех возможных вариантов. Оптимальное
решение задачи достигается поочередной перестановкой питчей, анализом
получаемого результата в соответствии с выбранными критериями оптимальности и,
в результате, нахождением оптимальной схемы.
Возможность получения требуемого результата
определяется в этом случае количеством возможных комбинаций
(последовательностей размещения питчей на протекторе шины) и скоростью
выполнения расчетов.
Каждая из получившихся таким образом комбинаций
носит название «перестановки».
Возьмем m различных элементов a1, a2, a3, am и
будем переставлять эти элементы всевозможными способами, оставляя неизменным их
число и меняя только их порядок.
Общее число перестановок из m элементов
рассчитывается как факториал от числа элементов системы, обозначается Pm. Это
число равно произведению всех целых чисел от 1 до m включительно.= 1·2·3 …(m−1)·m=
m!
Символ m! (m
факториал) есть сокращенное обозначение произведения 1·2·3 … (m-1)·m.
При перестановках 17, 32 и 64 элементов (питчей)
получается следующее количество вариантов:
! = 3.55687428096 · 10 + 14
! = 2.6313083693369 · 10 + 35
! =1.2688693218588 · 10 + 89
Количество вариантов огромное.
С учетом особенностей конкретной задачи
количество вариантов (перестановок) может быть снижено:
Предположим, имеется n1, n2, n3 питчей разных
типоразмеров, каждый в v1, v2, v3 вариантах расстановки шипов. На одной из рассмотренных
шин эти параметры равны n1=10, n2=7, n3=6, v1=5, v2=4, v3=4.
Считаем, что порядок типоразмеров питчей на
левой и правой стороне шины совпадает, варианты - произвольные. Возможных
расстановок типоразмеров:
Сnk(n1+n2+n3,
n1) * Cnk(n2+n3,
n2) = 1963217256
Возможных расстановок вариантов:
(v1n1 * v2n2 * v3n3)2 =
429496729600000000000000000000
Произведение этих чисел (деленное на количество
эквивалентных с точностью до поворота расстановок n1+n2+n3) дает оценку общего
числа вариантов как:
N = Сnk(n1+n2+n3,
n1) * Cnk(n2+n3, n2)* (v1n1 * v2n2 * v3n3)2 / (n1+n2+n3) =3.666E+37
Более оптимистичная оценка может быть получена
исходя из предположения что два питча с совпадающими дорожками шипов не могут
быть выставлены подряд. Наш анализ показывает, что это позволит уменьшить
среднее число подходящих вариантов на каждом шаге на 2, т.е. сложность полного
перебора уменьшается до:
N = С(n1+n2+n3, n1)
* С(n2+n3, n2) * (((v1-2)n1 * (v2-2)n2 * (v3-2)n3)2) / (n1+n2+n3) =1.997E+25
Вывод - алгоритм многокритериальной оптимизации
с анализом всех возможных вариантов даже при самых смелых предположениях о
возможностях программы для оптимизации схемы ошиповки протектора и доступных
вычислительных ресурсах не позволяет корректно и в разумный срок решить
поставленную задачу. Требуемое время превышает возраст вселенной.
5.3 Анализ возможностей алгоритмов
оптимизации для решения задачи разработки схемы размещения шипов на протекторе
шины
шина автомобиль
безопасность
Алгоритмы оптимизации позволяют находить точки в
области определения функции, на которых она достигает минимального или
максимального значения.
В процессе работы были рассмотренные следующие
алгоритмы оптимизации:
) Алгоритм Витерби - алгоритм поиска наиболее
подходящего списка состояний (называемого путём Витерби), получающий наиболее
вероятную последовательность произошедших событий. Алгоритм делает несколько
предположений:
· наблюдаемые и скрытые события должны быть
последовательностью. Последовательность чаще всего упорядочена по времени.
· две последовательности должны быть
выровнены: каждое наблюдаемое событие должно соответствовать ровно одному
скрытому событию
· вычисление наиболее вероятной
скрытой последовательности до момента t должно зависеть только от наблюдаемого
события в момент времени t, и наиболее вероятной последовательности до момента
t − 1.
Пример работы алгоритма Витерби представлен на
рисунке 44.
Рисунок 44. Пример работы алгоритма Витерби
На рисунке 44 видно четыре пути, ведущие в
каждый узел решетки. Рядом проставлены расстояния (меры расходимости) этих
путей от принятой последовательности на отрезке из 14 блоков. Мера верхнего
пути значительно меньше мер нижних. Поэтому можно предположить, что верхний
путь наиболее вероятен. Однако декодер Витерби, не зная следующих фрагментов
принимаемой последовательности, вынужден запомнить все четыре пути на время
приема t элементарных
блоков. Число t называется шириной
окна декодирования. Понятно, что для уменьшения ошибки декодирования следует
выбирать t достаточно большим,
в несколько раз превышающим длину блока, что, естественно, усложняет декодер.
В алгоритме Витерби реализуется декодирование,
основанное на принципе максимального правдоподобия. Однако в нем уменьшается
вычислительная нагрузка за счет использования особенностей структуры конкретной
решетки кода. Преимущество декодирования Витерби заключается в том, что
сложность декодера Витерби не является функцией количества символов в
последовательности кодовых слов. Алгоритм включает в себя вычисление меры
подобия (или расстояния), между сигналом, полученным в момент времени t1, и
всеми путями решетки, входящими в каждое состояние в момент времени t1. В
алгоритме Витерби не рассматриваются те пути решетки, которые, согласно
принципу максимального правдоподобия, заведомо не могут быть оптимальными. Если
в одно и то же состояние входят два пути, выбирается тот, который имеет лучшую
метрику; такой путь называется выживающим. Отбор выживающих путей выполняется
для каждого состояния. Таким образом, декодер углубляется в решетку, принимая
решения путем исключения менее вероятных путей. Предварительный отказ от
маловероятных путей упрощает процесс декодирования.
) Метод наискорейшего спуска
Применение метода наискорейшего спуска для
решения задачи оптимизации было рассмотрено еще известным французским
математиком Коши в XVIII
в. Идея его проста: градиент целевой функции f(x) в любой точке х есть вектор в
направлении наибольшего локального увеличения значения функции f(x).
Следовательно, нужно двигаться в направлении, противоположном градиенту f(x),
т.е. в направлении наискорейшего спуска, поскольку отрицательный градиент f(x)
в точке x(k)
направлен в сторону наибольшего уменьшения f(x) по всем компонентам х и
ортогонален линии уровня f(x) в точке x(k).
Введение направления, противоположного нормированному (единичному) градиенту
f(x), т.е. направления наискорейшего спуска, определяемого в точке x(k)
по формуле:
то это и будет направление наискорейшего спуска
в точке Xk.
Получаем формулу перехода из Xk в Xk+1:

Отрицательный градиент дает только направление
оптимизации, но не величину шага. При этом можно использовать различные
процедуры метода наискорейшего спуска в зависимости от выбора
λ
и определения выражения  .
.
Поскольку один шаг в направлении наискорейшего
спуска в общем случае не приводит в точку минимума функции f(x), алгоритм
должен применяться несколько раз, до тех пор пока минимум не будет достигнут. В
точке минимума все составляющие вектора градиента равны нулю.
Процедура строго наискорейшего допуска может
закончится в стационарной точке (в которой составляющие градиента f(x) равны
нулю) различного типа. Обычно бывает необходимо определить, является ли данная
точка точкой локального минимума (т.е. решением) или седловой точкой. Если это
седловая точка, то следует применить какой-либо не градиентный метод, чтобы
выйти из нее, после чего минимизация может продолжаться, как и ранее. Тип
стационарной точки может быть проведен путем исследования матрицы Гессе (если
ее возможно получить) целевой функции, взятой в данной стационарной точке. Если
матрица не является положительно определенной, то стационарная точка -
седловая. В качестве критерия окончания последовательной процедуры при движении
в направлении наискорейшего спуска применяются различные правила, основанные
либо на значение f(x) и величинах х, λ,  либо
на некоторой их комбинации, а также на соответствующих значениях этих величин
на предыдущих шагах.
либо
на некоторой их комбинации, а также на соответствующих значениях этих величин
на предыдущих шагах.
При выборе размера шага применяются два общих
метода, хотя могли бы быть рассмотрены и многие другие возможности. В первом
методе при переходе из точки x(k)
в точку x(k+1)
целевая функция минимизируется по λ,
в другом методе величина λ выбирается
фиксированной или меняется от шага к шагу.
При этом на каждом шаге старая информация
отбрасывается и заменяется новой информацией, так что никакого ускорения
оптимизации осуществить нельзя.
В общем случае один шаг не дает точку минимума,
поэтому процедура спуска должна применяться несколько раз. В точке минимума все
компоненты градиента равны нулю (рисунок
45).
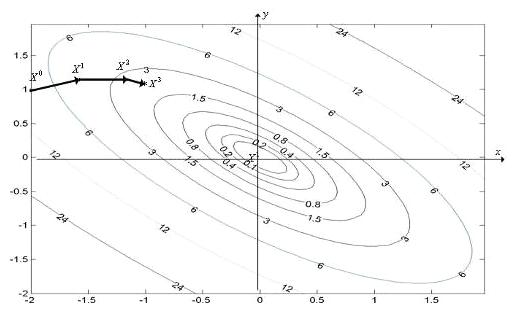
Рисунок 45. Метод наискорейшего спуска
Все градиентные методы используют изложенную
идею и отличаются друг от друга техническими деталями: вычисление производных
по аналитической формуле или конечно-разностной аппроксимации; величина шага
может быть постоянной, меняться по каким-либо правилам или выбираться после
применения методов одномерной оптимизации в направлении антиградиента.
Метод наискорейшего спуска не рекомендуется
обычно в качестве серьезной оптимизационной процедуры.
Одним из недостатков этого метода является то,
что он сходится к любой стационарной точке, в том числе и седловой, которая не
может быть решением.
Но самое главное - очень медленная сходимость
наискорейшего спуска в общем случае. Дело в том, что спуск является
"наискорейшим" в локальном смысле. Если гиперпространство поиска
сильно вытянуто ("овраг"), то антиградиент направлен почти
ортогонально дну "оврага", т.е. наилучшему направлению достижения
минимума. В этом смысле прямой перевод английского термина "steepest
descent", т.е. спуск по наиболее крутому склону более соответствует
положению дел, чем термин "наискорейший", принятый в русскоязычной
специальной литературе. Одним из выходов в этой ситуации является использование
информации даваемой вторыми частными производными. Другой выход - изменение
масштабов переменных.
) Градиентный спуск - метод нахождения
локального экстремума (минимума или максимума) функции с помощью движения вдоль
градиента. Для минимизации функции в направлении градиента используются методы
одномерной оптимизации. Также можно искать не наилучшую точку в направлении
градиента, а какую-либо лучше текущей (рисунок 46).
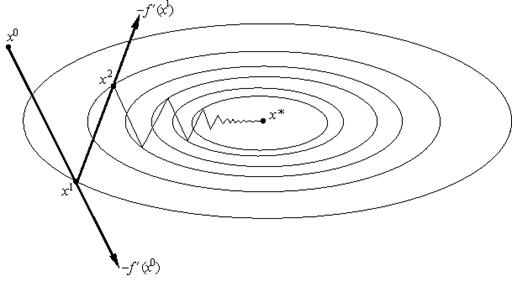
Рисунок 46. Алгоритм градиентного спуска
Метод градиентного спуска требует вычисления градиента
целевой функции на каждом шаге. Если она задана аналитически, то это, как
правило, не проблема: для частных производных, определяющих градиент, можно
получить явные формулы.
Идея метода градиентного спуска состоит в
следующем. Выбираем некоторую начальную точку и вычисляем в ней градиент
рассматриваемой функции. Делаем шаг в направлении, обратном градиентному. В
результате приходим в точку, значение функции в которой обычно меньше
первоначального. В новой точке процедуру повторяем: вычисляем градиент и снова
делаем шаг в обратном к нему направлении. Процесс продолжается до получения
наименьшего значения целевой функции. Момент окончания поиска наступит тогда,
когда движение из полученной точки с любым шагом приводит к возрастанию
значения целевой функции. Строго говоря, если минимум функции достигается
внутри рассматриваемой области, то в этой точке градиент равен нулю, что также
может служить сигналом об окончании процесса оптимизации.
Наиболее простой в реализации из всех методов
локальной оптимизации. Имеет довольно слабые условия сходимости, но при этом
скорость сходимости достаточно мала (линейна).
Шаг градиентного метода часто используется как
часть других методов оптимизации, например, метод Флетчера - Ривса.
) Метод Флетчера - Ривса (метод сопряженных
градиентов) - итерационный метод для безусловной оптимизации в многомерном
пространстве. Основным достоинством метода является то, что он решает
квадратичную задачу оптимизации за конечное число шагов. Поэтому, сначала
описывается метод сопряжённых градиентов для оптимизации квадратичного
функционала, выводятся итерационные формулы, приводятся оценки скорости
сходимости. После этого показывается, как метод сопряжённых обобщается для
оптимизации произвольного функционала, рассматриваются различные варианты
метода, обсуждается сходимость (рисунок 47).
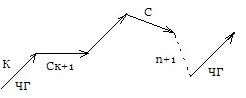
Рисунок 47. Метод Флетчера - Ривса
Данный метод основан на применении частных
производных целевой функции по независимым переменным и предназначении для
исследования унимодальных функций. В случае мультимодальности функции
необходимо выбрать несколько исходных точек для решения задачи и сравнивать
полученное решение для различных вариантов.
Алгоритм заключается в следующем:
. Выбирается исходная точка в пространстве оптимизации
и путем вычисления компонентов вектора градиента, определяется направление
наискорейшего подъема или спуска.
. Направление наискорейшего подъема ведется
одномерный поиск с заданным смещением в сторону градиента, до достижения
максимального значения функции.
. В полученной точке вычисляются параметры
нового вектора, направление которого несколько отличается от направления
градиента, представляет собой линейную комбинацию вектора градиента на данном
шаге и вектора градиента на предыдущем шаге. Это направление называют
сопряженным.
. По этому направлению вновь проводят одномерный
поиск. При достижении максимума проверяют, достигнута ли требуемая степень
сходимости. Если не достигнута, то осуществляется переход к 3 пункту и
процедура 3 и 4 пункта выполняется n+1 раз.
Если в течение этого цикла оптимальное значение
не найдено, то осуществляется переход к пункту 1, т.е. последующий поиск опять
начинают по направлению вектора градиента.
5) Метод Левенберга - Марквардта.
Алгоритм Левенберга - Марквардта является
наиболее распространенным алгоритмом оптимизации. Алгоритм удачно сочетает в
себе метод наискорейшего спуска (т.е. минимизации вдоль градиента) и метод
Ньютона (т.е. использование квадратичной модели для ускорения поиска минимума
функции). От метода наискорейшего спуска алгоритм позаимствовал стабильность
работы, от метода Ньютона - ускоренную сходимость в окрестностях минимума.
В методе Левенберга - Марквардта при
поиске направления для очередного приближения используется корректирующий
множитель.
Корректирующий множитель λ
(множитель
Марквардта) пересчитывается на каждой итерации метода, причем он уменьшается
при сильном уменьшении целевой функции (направление становится ближе к
направлению Гаусса-Ньютона) и увеличивается при недостаточном уменьшении либо
невозможности уменьшения целевой функции.
Пересчет длины шага αs
методом
линейного поиска происходит не на каждой итерации, а лишь при невозможности
уменьшить целевую функцию. При этом множитель Марквардта также меняется (в
сторону увеличения). Если пять последовательных итераций не привели к
уменьшению целевой функции, то алгоритм заканчивает работу (рисунок 48).
Рисунок 48. Метод Левенберга - Марквардта
Таким образом, итерационный метод
останавливается, если выполнено одно из условий останова:
) относительное изменение искомой точки на
очередной итерации не превысило заданное значение точности;
) достигнуто заданное максимальное количество
итераций;
) очередная итерация не привела к уменьшению
исследуемой целевой функции.
) Алгоритм имитации отжига - общий
алгоритмический метод решения задачи глобальной оптимизации, особенно
дискретной и комбинаторной оптимизации. Алгоритм основывается на имитации
физического процесса, который происходит при кристаллизации вещества.
Предполагается, что атомы уже выстроились в кристаллическую решётку, но ещё
допустимы переходы отдельных атомов из одной ячейки в другую (рисунок 49) [9].

Рисунок 49. Алгоритм имитации отжига
Наиболее подходящими являются алгоритмы
градиентного спуска и имитации отжига. Проведенный дополнительный анализ их
возможностей реализации в компьютерной программы для решения поставленной
задачи показал предпочтительность выбора алгоритма имитации отжига.
Алгоритм имитации отжига
В результате анализа большого количества
известных алгоритмов решения оптимизационных задач установлено, что эффективное
решение задачи поиска оптимальной схемы размещения шипов на протекторе шины
достижимо при применении алгоритма «имитации отжига».
Алгоритм имитации отжига (Simulatedannealing) -
общий алгоритмический метод решения задачи глобальной оптимизации, особенно
дискретной и комбинаторной оптимизации [8,9]. Стандартные градиентные методы
(методы спуска) в данном случае неприменимы, поскольку имеется множество
локальных максимумов. Алгоритм основывается на имитации физического процесса,
который происходит при кристаллизации вещества. Предполагается, что отдельные
атомы уже выстроились в кристаллическую решетку, но ещё допустимы переходы отдельных
атомов из одной ячейки в другую. Устойчивая кристаллическая решётка
соответствует минимуму энергии атомов, поэтому атом либо переходит в состояние
с меньшим уровнем энергии, либо остаётся на месте. Условно считаем
последовательность питчей аналогом кристаллической решетки, а отдельные питчи -
атомами в ней.
При помощи моделирования такого процесса ищется
такая точка или множество точек, на котором достигается минимум некоторой
числовой функции  , где
, где  .
Решение ищется последовательным вычислением точек
.
Решение ищется последовательным вычислением точек  пространства
X; каждая точка, начиная с
пространства
X; каждая точка, начиная с  , «претендует» на
то, чтобы лучше предыдущих приближать решение. Алгоритм принимает точку
, «претендует» на
то, чтобы лучше предыдущих приближать решение. Алгоритм принимает точку  как
исходные данные. На каждом шаге алгоритм (который описан ниже) вычисляет новую
точку и понижает значение величины (изначально положительной). Алгоритм
останавливается по достижении точки, которая оказывается при температуре ноль
(минимум энергии).
как
исходные данные. На каждом шаге алгоритм (который описан ниже) вычисляет новую
точку и понижает значение величины (изначально положительной). Алгоритм
останавливается по достижении точки, которая оказывается при температуре ноль
(минимум энергии).
Точка  по
алгоритму получается на основе текущей точки
по
алгоритму получается на основе текущей точки  следующим
образом. К точке применяется оператор
A, который случайным образом модифицирует соответствующую точку, в результате
чего получается новая точка
следующим
образом. К точке применяется оператор
A, который случайным образом модифицирует соответствующую точку, в результате
чего получается новая точка  . Точка становится
точкой с
вероятностью
. Точка становится
точкой с
вероятностью , которая
вычисляется в соответствии с распределением Гиббса:
, которая
вычисляется в соответствии с распределением Гиббса:

Здесь  -
элементы произвольной убывающей, сходящейся к нулю положительной последовательности,
которая задаёт аналог падающей температуры в кристалле. Скорость убывания и
закон убывания могут быть заданы по желанию создателя алгоритма.
-
элементы произвольной убывающей, сходящейся к нулю положительной последовательности,
которая задаёт аналог падающей температуры в кристалле. Скорость убывания и
закон убывания могут быть заданы по желанию создателя алгоритма.
Алгоритм имитации отжига похож на градиентный
спуск, но за счёт случайности выбора промежуточной точки должен будет попадать
в локальные минимумы реже, чем градиентный спуск. Алгоритм имитации отжига не
гарантирует нахождения минимума функции, однако при правильной политике
генерации случайной точки в пространстве X, как правило, происходит реальное
улучшение начального приближения.
5.4 Критерии оптимальности
Правильный выбор критериев играет существенную
роль в выборе оптимального решения. В теории принятия решений не найдено общего
метода выбора критериев оптимальности. В основном руководствуются опытом или
рекомендациями. Применение для технических задач только одного критерия часто
приводит к абсурдным результатам, выходящим за область допустимых решений.
Большие сложности вызывают «неисчисляемые»
критерии оптимальности. Для учёта таких критериев могут применяться экспертные
оценки.
Наиболее разработаны методы однокритериальной
оптимизации, в большинстве случаев позволяющие получить однозначное решение. В
задачах многокритериальной оптимизации абсолютно лучшее решение выбрать
невозможно (за исключением частных случаев), так как при переходе от одного
варианта к другому, как правило, улучшаются значения одних критериев, но
ухудшаются значения других. Состав таких критериев называется противоречивым, и
окончательно выбранное решение всегда будет компромиссным. Компромисс
разрешается введением тех или иных дополнительных ограничений или субъективных
предположений. Поэтому невозможно говорить об объективном единственном решении
такой задачи.
Часто многокритериальную задачу сводят к
однокритериальной применением «свёртки» критериев в один комплексный,
называемый целевой функцией. В ряде случаев успешно применяются ранжирование и
последовательное применение критериев оптимальности.
Наибольшая эффективность ошиповки зимней шины
достигается при выполнении ряда требований и рекомендаций (критерии
оптимизации) к схеме размещения шипов на протекторе, некоторые из которых
приведены ниже:
получить максимально возможное количество
продольных дорожек шипов;
обеспечить равномерность распределения шипов по
всей длине протектора шины (постоянное количество шипов в пятне контакта);
исключить (по возможности) совпадения дорожек
шипов в продольном направлении в пределах пятна контакта;
обеспечить (по возможности) максимальное
расстояние между шипами, находящимися на одной продольной дорожке;
исключить (по возможности) совпадения дорожек
шипов в угловых направлениях в пределах пятна контакта;
обеспечить (по возможности) максимальное
расстояние между шипами, находящимися на одной дорожке в угловых направлениях в
пределах пятна контакта.
Данные требования не являются однозначными,
частично противоречивы.
Критерий оптимальности, разработанный для
программы «Sheep» является
сложной цифровой функцией, учитывающей все основные требования. При этом
значимость «конфликтующих» требований существенно различается. На каждом этапе
оптимизации программой вычисляется цифровое значение этой функции - «рейтинг»
текущего состояния.
5.5 Описание программы «Sheep»
Разработанная программа «Sheep»
базируется на алгоритме имитации отжига. Критерии оптимизации, разработанные
для программного обеспечения и указанные выше, будут является сложной цифровой
функцией, учитывающей все основные требования. При этом значимость
«конфликтующих» критериев будет существенно различается. На каждом этапе
оптимизации программой должно вычисляться цифровое значение этой функции -
«рейтинг» текущего состояния.
В соответствии с рисунком 50 файл исходных
данных «config»
предназначен для ввода информации, необходимой для корректной работы программы
- параметры протектора, отдельных питчей, координаты шипов, продолжительность
цикла оптимизации и др.

Рисунок 50. Часть файла ввода исходных данных
Оптимизация схемы ошиповки построена на принципе
взаимной перестановки пары питчей одной ширины, выбираемых случайным образом
[8] (с учетом специфических особенностей протектора) из автоматически
построенной первичной схемы протектора. Применение специального алгоритма
позволяет существенно уменьшить количество заведомо неэффективных действий - работа
ведется в зоне текущего локального минимума рейтингового показателя. Для каждой
позиции подсчитывается общий рейтинг. В процессе построения рейтинга текущей
позиции, по всей замкнутой окружности поверхности протектора, в перетекающем
пятне контакта определяется количество шипов, количество дорожек шипов,
количество совпадений дорожек шипов в прямом и угловых направлениях с учетом
расстояния между ними. Сохранение достигнутого результата производится, если
рейтинг данной позиции оказывается выше ранее полученного. Программа работает в
бесконечном, цикличном режиме. В любой момент времени возможен просмотр
сохраненного варианта схемы ошиповки с наивысшим достигнутым рейтингом.
В начале первого цикла работы программы «Sheep»
производится проверка и анализ введенной информации, генерируется исходная
схема последовательности размещения питчей, рассчитывается «рейтинг» ее
текущего состояния и, затем, начинается процесс оптимизации. В соответствии с
рисунком 51 часть информации отображается в постоянно обновляющемся
информационном окне программы, что позволяет визуально контролировать процесс
работы программы. В нижней части окна видны постепенно улучшающиеся текущие
рейтинги [12].
Рисунок 51. Информационное окно «Sheep»
(начальный этап)
Дальнейшая работа программы производится в
цикличном режиме. В соответствии с рисунком 52 виден момент сохранения
промежуточного результата с наивысшим на данный момент рейтингом и начало
следующего цикла.
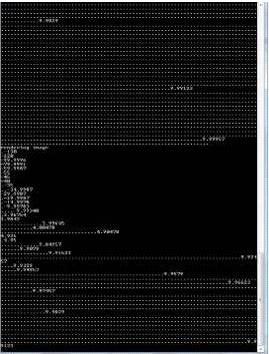
Рисунок 52. Информационное окно «Sheep»
(последующие циклы)
Полученные результаты выводятся в цифровом
(список питчей в рекомендуемой последовательности размещения) и графическом
виде. На рисунках 53 и 54 приведен результат с низким рейтингом, полученный в
течение нескольких минут работы программы. Визуально видны совпадения дорожек и
неравномерность распределения шипов по поверхности протектора. Особенностью
применяемого алгоритма и, соответственно, расчетной программы является очень
быстрое получение результата с относительно невысоким рейтингом (один из
множества локальных максимумов низкого и среднего уровня). Количество
максимумов с более высокими рейтингами значительно меньше, и на их поиски
требуется существенно больше времени.
Рисунок 53. Графическое отображение результата
оптимизации (локальный максимум с низким рейтингом)
Рисунок 54. Результат оптимизации - список
питчей (локальный максимум с низким рейтингом)
С целью обеспечения возможности более
равномерного размещения шипов в схеме чередования, была проведена корректировка
расстановки шипов противоскольжения. В расчетную программу включили контроль
расстояния между шипами на одной продольной дорожке. Увеличена продолжительность
цикла - до 5 млн. перестановок. В результате расчетов по измененным исходным
данным получен результат, рейтинг которого существенно выше первоначального
(рисунок 55, 56).
Рисунок 55. Графическое отображение результата
оптимизации (локальный максимум с максимальным рейтингом)
Рисунок 56. Результат оптимизации - список
питчей (локальный максимум с максимальным рейтингом)
Выполненная корректировка расчетной программы
позволила получить результат, близкий к максимально возможному (рисунок 55).
Количество проанализированных вариантов - более 2 млрд.
В главе 5 выпускной квалификационной работе был
проведен поиск, обоснование и реализация алгоритма, обеспечивающего эффективное
решение задачи оптимальной схемы размещения шипов на протекторе шины в
соответствии с критериями оптимальности, на базе которого работает программа «Sheep».
Разработана схема чередования питчей для
представленной шины, обеспечивающая близкие к оптимальным распределениям шипов
по протектору. Обеспечена достаточно высокая равномерность распределения шипов
на протекторе шины. Минимизировано количество совпадений дорожек шипов в
угловых направлениях.
Выводы
После запрессовки шипа противоскольжения в
выступ протектора на него действуют только распределенные боковые реакции
резины протектора, вызванные растягивающими и сжимающими напряжениями резины.
Под действием этих сил шип находится в вертикальном положении.
При движении автомобиля шипы в протекторе шины
совершают циклические движения - наклоняются на определенный угол относительно
своего исходного вертикального положения. При нестационарных условиях (разгон,
торможение) амплитуда таких движений шипов существенно увеличивается.
Кроме того, шипы совершают возвратно-поступательные
движения в осевом направлении, циклически утапливаясь в протектор на различную
глубину в зависимости от твердости дорожного покрытия.
Очевидно, что при таких движениях имеет место
трение между поверхностями шипа и стенками отверстия, а также существенные
циклические упругие деформации материала протектора, прилегающего к шипу.
Эти процессы сопровождаются выделением тепла и,
следовательно, возрастанием температуры прилегающих к шипу объемов резины, что
приводит к ускоренному разрушению резины.
При анализе рассмотренных процессов износа
установлено, что поверхностное трение в зоне прилегания боковой поверхности
шипа и резины создает условия для интенсивного термомеханического износа
поверхностей.
Кроме процессов износа, связанных с трением, имеют
место и процессы макроразрушения стенок отверстия протектора в результате
усталостных эффектов. Многократные, циклические деформации резины приводят к
образованию поверхностных микротрещин (разрывов). Зоны максимальных деформаций
располагаются непосредственно на контактных поверхностях и вблизи них. В
дальнейшем эти микротрещины, вырастают в макроразрывы и могут быть причиной
отрыва существенных по объему частиц резины.
В результате данного исследования было
установлено, что на износ отверстий большое влияние оказывают форма и размеры
шипов. Также было подтверждено предположение о том, что при повышенных исходных
напряжениях резины износ стенок отверстий происходит более интенсивно.
Относительно лучшие результаты по износу
отверстий (меньше разрывов на стенках отверстия от фланцев шипа) показал шип
модели UGIGRIP 8-10-1.
Среднее значение угловой жесткости Су при
исходных моментах М1 и М2 у данного шипа составила 15,075 и 9,183
соответственно при средней температуре 50,285⁰С.
При установке шипа Scason
MR-11 износ системы
увеличился по сравнению с шипом модели UGIGRIP 8-10-1. Средняя температура
стенок отверстий в процессе эксперимента (при одинаковых условиях) увеличилась
примерно на 24%, а угловая жесткость посадки шипа при исходных моментах М1 и М2
после испытаний оказалась ниже на 34%.
По результатам исследования наиболее низкие
показатели получились у шипа модели UGIGRIP U8-10-2.
Это связано с тем, что из-за наличия острых кромок на фланцах и избыточной
исходной жесткости посадки происходит увеличение температуры (до 78⁰С)
и интенсивным разрушением отверстия. Среднее значение угловой жесткости Су при
исходных моментах М1 и М2 у данного шипа составила 7,9007 и 4,925
соответственно.
Выявлены 3 основные зоны разрушения:
1) вынос резины под верхним фланцем;
2) разрывы в зоне контакта с кромкой
верхнего фланца (наибольшие напряжения);
) износ резины в зоне нижнего фланца
(повышенные напряжения, высокие амплитуды качания).
Таким образом, при анализе экспериментально
полученных данных (износ стенок отверстия шипа на лабораторном стенде) было
выявлено, что в зонах максимальных напряжений и износа отверстия необходимо
изменять его форму, с целью обеспечения более равномерного распределения
напряжений в зоне контакта шипа с резиной протектора.
В выпускной квалификационной работе был проведен
поиск, обоснование и реализация алгоритма, обеспечивающего эффективное решение
задачи оптимальной схемы размещения шипов на протекторе шины в соответствии с
критериями оптимальности, на базе которого работает программа «Sheep».
Разработана новая схема чередования питчей для
шины 175/70/R13 82T
Я-620 MEDVED,
обеспечивающая близкие к оптимальным распределениям шипов по протектору.
Обеспечена достаточно высокая равномерность распределения шипов на протекторе
шины. Минимизировано количество совпадений дорожек шипов в угловых
направлениях. Таким образом, разработанная схема размещения шипов, как минимум,
не уступает лучшим зарубежным аналогам.
Заключение
В выпускной квалификационной работе было
разработано:
1) методика исследования износа в системе
«шип-протектор шины»;
2) имитационно-измерительный стенд для
исследования процессов износа, протекающих при работе шипа;
) программа по оптимизации расстановки шипов
противоскольжения на протекторе шины.
Для исследования была выбрана шина 175/70/R13
82T Я-620 MEDVED
и 3 модели шипа UGIGRIP 8-10-1, SCASON MR-11, UGIGRIP U8-10-2.
В литературном обзоре был проведён анализ
литературных источников, в которых рассматриваются технологии, оборудование,
инструмент для ошиповки зимних шин. Рассмотрены основные виды шипов. Поставлены
цели и задачи.
Во второй главе выпускной квалификационной
работы разработана методика исследования процесса износа в системе «шип -
протектор шины».
В третьей главе представлена конструкция и
кинематическая схема имитационно-измерительного стенда для исследования
процессов износа, протекающих при работе шипа.
В четвертой главе получены результаты
экспериментальных исследований. Проведен их анализ.
В пятой главе разработаны критерии оптимизации,
выбран алгоритм и разработана программа по оптимизации расстановки шипов
противоскольжения на протекторе шины.
В шестой главе сделаны выводы и даны
рекомендации по результатам исследований.
Список использованных источников
.
Гулин, Р. В. Оптимизация технических и технологических параметров ошиповки
автомобильных шин: дис. … канд. техн. наук: / Р. В. Гулин. - Москва НИИШП,
2003. - 150 с.
.
Степанов A.C. Обуваемся в «шиповки» / А. С. Степанов, С. М. Щекин // За рулем.
- 1998. - №1. - С.14-17.
.
Степанов А. С. Шины и шипы / А. С. Степанов, С. М. Щекин. - Вологда: ВоПИ,
1996. - 168 с.
.
Михайлов, Ю. Б. Шины с шипами. За и против. Производство и эксплуатация /
Михайлов Ю. Б. - Санкт-Петербург: Б.С.К., 1998. - 202 с.
.
Степанов, А. С. Влияние массы шипа на износ дорожного полотна и пылеобразование
при использовании шипованных шин / А. С. Степанов, С. М. Щекин, А. А. Фролов,
Р. В. Гулин // Менеджмент экологии: сборник докладов регион. науч.-практ.конф.
/ ВоГТУ. - Вологда, 1999. - С. 21-25.
.
Степанов, А. С. Работоспособность шипов противоскольжения / А. С. Степанов, С.
М. Щекин, С. В. Яняк // Сборник научных трудов института / ВоПИ. - Вологда,
1996. - С.10-12.
.
Фролов, А. А. Совершенствование технологии и оборудования для ошиповки
автомобильных шин шипами противоскольжения: дис. … канд. техн. наук / А. А.
Фролов. - Москва НИИШП, 2001. - 180 с.
.
Степанов, А. С. Оптимизация схемы размещения шипов в процессе проектирования
зимней шины / А. С. Степанов, Е. А. Степанов // Проблемы шин и резинокордных
композитов: материалы Пятнадцатого симпозиума/ ФГУП «НИИШП». - Москва, 2004. -
Т. 2. - С. 219-224.
.
Википедия [Электронный ресурс]: свободная энциклопедия. - Режим доступа:
https://ru.wikipedia.org
10.
Степанов, А. С. Влияние технологических параметров ошиповки автошин на
безопасность дорожного движения / А. С. Степанов, А. В. Старостин, Е. В. Реутов
// Организация и безопасность дорожного движения в крупных городах: сборник
докладов седьмой международной науч.-практич. конф. / Спб. гос. архит.-строит.
ун-т. - Санкт-Петербург, 2006. - С. 488-494.
11.
Стратий, И.В. Специальное программное обеспечение для оптимизации расположения
шипов в шине / Прогрессивные технологии и процессы: сборник научных статей 2-й
Международной науч.-технич. конф. / Юго-Зап. гос. ун-т. - Курск, 2015. - Т.3. -
С. 64-66.
12.
Стратий, И.В. Разработка программы по оптимизации расстановки шипов
противоскольжения на протекторе шины / С.А. Фролов, А.С. Степанов //
Современные инструментальные системы, информационные технологии и инновации:
сборник научных трудов 7-й Международной науч.-пратич. конф. / Юго-Зап. гос.
ун-т. - Курск, 2015. - Т.4. - С. 94-99.
Приложение
Набор питчей шины 175/70/R13
82T
Я-620 MEDVED
Рис.57 Блок А:
Рис.58. Блок В:
Рис.59. Блок С:
Рис.60. Блок D