Автоматизация системы бытового водоснабжения
Содержание
Введение
. Нормативные ссылки
. Технико-экономическое обоснование создания
автоматизированной системы
.1 Краткое описание предполагаемого технологического решения
.2 Недостатки используемого решения
.3 Организация работ по проектированию и разработке
оптимального варианта технической части
.3.1 Основание для проектирования
.3.2 Содержание работ по стадии создания проекта
.3.3 Порядок контроля и приемки системы
.3.4 Содержание работ по стадии внедрения системы
.3.5 Требования к документации
.3.6 Требования безопасности
.3.7 Противопожарные мероприятия
.3.8 Штатное расписание
.3.9 Калькуляция затрат на разработку
. Изучение технологического объекта управления
.1 Общие сведения
.2 Требования к насосным станциям
. Разработка концепции автоматизированной системы
управления
.1 Выбор технологического оборудования
.1.1 Выбор программируемого логического контроллера
.1.2 Выбор модулей ввода-вывода
.1.2.1 Модуль ввода аналоговый (МВА8).
.1.2.2 Модуль вывода управляющий (МВУ8)
.1.2.3 Модуль дискретного ввода-вывода
.2 Частотный преобразователь
.3 Датчики давления
.4 Датчики уровня
.5 Преобразователь расхода
.6 Выбор программного обеспечения
.6.1 Среда разработки
.6.2 Языки программирования
.6.3 Средства разработки человеко-машинного интерфейса
.7 Состав каналов и требования к ним
.8 Контроль обрыва датчиков
.9 Контроль исправности насосов
.10 Резервирование
.11 АРМ оператора
. Технического задание на создание автоматизированной
системы управления
.1 Основание для проектирования
.2 Назначение и цели создания системы
.3 Краткие сведения об объекте автоматизации
.4 Перечень задач автоматизации и требования к техническим
характеристикам системы
.5 Требования к системе
.6 Требования по безопасности
.7 Требования к подготовленности персонала АСУ
. Исследование автоматизированной системы управления
.1 Общие сведения
.2 Алгоритм сбора и обработки информации
.3 Алгоритм управления скважинами
.4 Методы расчета оптимальных режимов работы
. Разработка проектной документации на
автоматизированную систему управления
.1 Описание схемы автоматизации
.2 Описание схемы регулирования
.3 Описание схемы сигнализации
.4 Описание схемы питания
.5 Описания схемы подключения внешних проводок
.6 Описание структурной схемы
. Проектная оценка надежности системы
. Мероприятия по подготовке объекта автоматизации и
персонала к вводу системы в действие
. Экономическая эффективность внедрения
автоматизированоой системы управления
. Метрологическое обеспечение
.1 Обоснование выбора средств автоматизации
.1.1 Метрологические характеристики датчика давления
.1.2 Метрологические характеристики датчика уровня
.2 Поверка датчика давления ОВЕН ПД100
.2.1 Средства поверки
.2.2 Условия поверки
.2.3 Внешний осмотр
.2.4 Опробование
.2.5 Определение основной погрешности измерения
.2.6 Определение вариации выходного сигнала
. Безопасность жизнедеятельности
.1 Значение и задачи безопасности жизнедеятельности
.2 Анализ условий труда и мероприятия воздействия вредных
производственных факторов
.2.1 Анализ вредных и опасных факторов на рабочем месте
.2.2 Санитарно-гигиенические требования к помещениям
.2.3 Производственный шум и вибрации
.2.4 Освещенность
.3 Расчет освещения
.3.1 Определение площади помещения
.3.2 Определение индекса помещения
.3.3 Определение требуемого количества светильников
.4 Обеспечение электробезопасности
.5 Пожарная безопасность
.6 Безопасность жизнедеятельности в чрезвычайных ситуациях
Заключение
Список использованных источников
Введение
Вода является одним из важнейших природных ресурсов в нашей жизни. Этот
природный элемент используется практически во всех сферах нашей жизни.
Следовательно, встает вопрос повышения эффективности технологического процесса
добычи воды.
Насосные станции систем водоснабжения представляют собой комплекс
сооружений и оборудования, обеспечивающий водоснабжение в соответствии с
нуждами потребителя. Состав сооружений, их конструктивные особенности, тип и
число основного и вспомогательного оборудования определяются исходя из
принципов комплексного использования водных ресурсов и охраны природы с учетом
назначения насосной станции и предъявляемых к ней технологических требований.
Введение автоматизации управления насосными станциями является одним из
важнейших направлений технического прогресса в области подачи и отведения воды
в населенных пунктах и на промышленных предприятиях.
Современные системы водоснабжения имеют разветвленную сеть и большое
число водопитателей, расположенных на обширной территории. Визуальный контроль
за состоянием технологического оборудования и ручное управление агрегатами не
могут обеспечить достаточной надежности и экономичности работы насосных
станций. Автоматизация систем водоснабжения дает значительные преимущества во
многих аспектах добычи воды, такие как положительный экономический эффект,
улучшение условий труда персонала, снижение влияния человеческого фактора,
снижение вероятности возникновения аварийных ситуаций.
В данной работе рассматривается автоматизация системы бытового
водоснабжения, состоящего из двух групп по три скважины, резервуара и насосной
второго подъема. Конечной задачей данной системы водоснабжения является
бесперебойная подача воды потребителю с оптимальным давлением. Разрабатываемая
система водоснабжения призвана снизить расходы на обслуживание данной системой
водоснабжения, тем самым снизив себестоимость добываемой воды, а так же
повысить ее эффективность.
1. Нормативные ссылки
В данной выпускной квалификационной работе были использованы ссылки на
следующие нормативные документы:
ГОСТ 12.0.003-74 Опасные и вредные производственные факторы.
ГОСТ 12.1.003-83 Шум. Общие требования безопасности.
ГОСТ 12.1.005-88 Общие санитарно-гигиенические требования к воздуху
рабочей зоны.
ГОСТ 12.1.012-78 ССБТ. Вибрация. Общие требования безопасности.
ГОСТ 12.1.013-78 Система стандартов безопасности труда. Строительство.
Электробезопасность. Общие требования
ГОСТ 12.2.007.0-75 Система стандартов безопасности труда - Изделия
электротехнические.
ГОСТ 12.4.026-76 Цвета сигнальные и знаки безопасности.
ГОСТ 19.104-78 ЕСПД. Основные надписи.
ГОСТ 19.202-78 ЕСПД. Спецификация. Требования к содержанию и оформлению.
ГОСТ 19.404-79 ЕСПД. Пояснительная записка. Требования к содержанию и
оформлению.
ГОСТ 21.404-85 СПДС. Автоматизация технологических процессов. Обозначения
условные приборов и средств автоматизации в схемах.
ГОСТ 24.104-85 Документация на АСУ. Автоматизированные системы
управления. Общие требования.
ГОСТ 24.302-80 Документация на АСУ. Общие требования к выполнению схем.
ГОСТ 34.602-89 Информационная технология. Комплекс стандартов на
автоматизированные системы. Техническое задание на создание автоматизированной
системы.
ГОСТ 22269-76 Система "Человек-машина". Рабочее место
оператора. Взаимное расположение элементов рабочего места. Общие эргономические
требования.
ГОСТ 25861-83 - Машины вычислительные и системы обработки данных. Требования
по электрической и механической безопасности и методы испытаний
СНиП 2.04.02-84 - Водоснабжение. Наружные сети и сооружения.
1
2. Технико-экономическое обоснование создания
автоматизированной системы
.1 Краткое описание предполагаемого технологического решения
Целью деятельности любого предприятия является эффективное
функционирование как с точки зрения рационального использования ресурсов, так и
с точки зрения неуклонного ускорения НТП и полного удовлетворения нужд
производителей и потребителей. Поэтому для повышения эффективности производства
требуется создание АСУ, в настоящее время важное место при ее создании занимают
вопросы технико-экономического обоснования.
Насосные станции систем водоснабжения представляют собой комплекс
сооружений и оборудования, обеспечивающий водоснабжение в соответствии с
нуждами потребителя. Состав сооружений, их конструктивные особенности, тип и
число основного и вспомогательного оборудования определяются исходя из
принципов комплексного использования водных ресурсов и охраны природы с учетом
назначения насосной станции и предъявляемых к ней технологических требований.
Введение автоматизации управления насосными станциями является одним из
важнейших направлений технического прогресса в области подачи и отведения воды
в населенных пунктах и на промышленных предприятиях.
Современные системы водоснабжения имеют разветвленную сеть и большое
число водопитателей, расположенных на обширной территории. Визуальный контроль
за состоянием технологического оборудования и ручное управление агрегатами не
могут обеспечить достаточной надежности и экономичности работы насосных
станций.
Применение автоматизированного управления насосными станциями дает
значительные преимущества:
позволяет уменьшить вместимость баков водонапорных башен и
сборных резервуаров за счет увеличения частоты плавного пуска и остановки
агрегатов, либо полностью отказаться от применения водонапорных башен за счет
частотного регулирования;
снижает эксплуатационные расходы вследствие уменьшения числа
обслуживающего персонала, а также расходов на отопление и освещение помещений;
увеличивает срок службы оборудования и приборов благодаря
своевременному выключению из работы агрегатов при возникновении неполадок в их
работе;
снижает строительную стоимость, так как оборудование
концентрируется на меньшей площади машинного зала и отпадает необходимость в
устройстве бытовых и вспомогательных помещений;
дает возможность сосредоточить управление несколькими
автоматизированными насосными станциями в одном пункте, что делает систему
более гибкой и надежной;
исключает участие персонала станции в технологических операциях,
протекающих в антисанитарных условиях.
Ожидаемый эффект от автоматизации:
снижение потребления тока за счет автоматического поддержания
оптимального давления;
исключение бросков тока, перегружающих система электроснабжения
за счет плавного пуска;
снижение средней частоты вращения насосного повышает ресурс
насоса и двигателя в 1,5 раза, а так же исключает резонансные эффекты
конструкции;
уменьшение гидравлической нагрузки на трубопровод и полное
исключение гидроударов, вызывающие частые порывы;
уменьшение расхода воды за счет снижения давления до
оптимального.;
исключение дневных отключений воды за счет того, что глубинные
насосы успевают накачивать воду в кейсон;
дополнительное энергосбережение за счет уменьшения работы
глубинных насосов;
После модернизации система будет обеспечивать круглосуточную подачу воды,
автоматически переходя в экономичный режим и расходуя минимум электроэнергии.
Будут обеспечены схемы резервирования системы и индикация режимов работы,
возможность ручного управления.
2.2 Недостатки используемого решения
Управление насосами скважин и водозабора производится вручную.
Оперативный контроль параметров: состояние насоса, давление воды, текущий и
суммарный расходы воды - на станции водозабора отсутствует. Диспетчер для
поддержания необходимого уровня воды в накопительных емкостях совершает обход
всех скважин и включает/выключает насосы при помощи пульта управления. При этом
ему нужно следить за давлением и расходом воды в трубопроводе для
хозяйственно-бытовых целей и опять же вручную включать/выключать сетевые
насосы. Для обеспечения круглосуточного дежурства на станции водозабора в штате
предприятия необходимо иметь шесть человек, труд каждого из которых должен быть
оплачен. В данном случае мы имеем большую степень вероятности проявление
человеческого фактора, что может привести к непоправимым последствиям. Такой
порядок работы не устраивает руководство и требуется создать новую систему
управления и при этом соблюсти ряд условий:
- решение должно быть недорогим;
- необходимо автоматизировать все процессы добычи воды и ее
доставки потребителю;
- оператор должен иметь возможность вмешиваться в процесс
управления и дистанционно управлять работой всех насосов с ПК;
- должен быть обеспечен оперативный мониторинг работы скважин,
станции водозабора, уровней воды в накопительных емкостях и архивация выбранных
параметров на компьютере;
- важно вести протокол событий процессов.
2.3 Организация работ по проектированию и разработке оптимального
варианта технической части
.3.1 Основание для проектирования
Проект системы контроля и управления процессом водоснабжения,
разрабатывается в соответствии с заданием на дипломное проектирование, а также
с необходимостью усовершенствования реально существующей системы.
Система контроля технологическим процессом предназначена для выполнения
заданного технологического регламента. Разработанная система должна обеспечить:
- бесперебойную подачу воды с заданным давлением в сети;
- противопожарный запас воды;
- надежность системы за счет контроля технологического
оборудования;
- архивирование статистических данных;
- представление графиков работы скважин и ведение учета
потребляемой воды;
- постоянный необходимый запас воды в резервуарах;
- уменьшение времени реагирования на нештатные ситуации;
- минимизацию эксплуатационных затрат за счет снижения
потребляемой электроэнергии и уменьшение числа обслуживающего персонала.
2.3.2 Содержание работ по стадии создания проекта
Обследование объекта и обоснование необходимости создания системы,
формирование требований к системе; оформление отчета о выполненной работе и
заявки на систему; проведение необходимых научно-исследовательских работ;
разработка вариантов концепции системы, удовлетворяющего требованиям
пользователя; оформление отчета о выполненной работе.
2.3.3 Порядок контроля и приемки системы
Проведение предварительных испытаний; контрольный запуск системы;
проверка работы предусмотренных систем защиты.
.3.4 Содержание работ по стадии внедрения системы
Подготовка системы к вводу в действие; подготовка персонала; комплектация
СК поставляемыми изделиями; пусконаладочные работы; проведение предварительных
испытаний; проведение опытной эксплуатации; проведение приемочных испытаний.
2.3.5 Требования к документации
Необходима разработка схем автоматизации, регулирования, сигнализации,
питания, внешних проводок, перечня приборов щита.
Информационный обмен между верхним и нижним уровнями системы контроля
должен осуществляться путем передачи сигнала по протоколу интерфейсу RS-485.
Должна быть предусмотрена возможность восстановления базы данных системы
контроля с использованием резервной базы данных и архивной информации.
Требования к применению языков программирования, языков взаимодействия
пользователей и технических средств системы, а также требования к кодированию и
декодированию данных, средствам манипулирования данными и способам организации
диалога определяются применяемым для реализации АСУ ТП комплексом технических
средств.
Человеко-машинное взаимодействие при вводе-выводе информации должно
осуществляться в интерактивном режиме с помощью клавиатуры и/или сенсорного
дисплея для системы контроля верхнего и нижнего уровня.
Должны быть обеспечены единство и однозначность кодирования информации
различных уровней системы.
Программное обеспечение системы контроля должно быть достаточным для
реализации всех функций системы.
Программное обеспечение должны поставляться в составе комплекса
технических средств.
Прикладное программное обеспечение подсистем нижнего уровня может быть
создано путем конфигурирования стандартных программных модулей с использованием
инструментального комплекса техническим средств. При необходимости должны быть
разработаны дополнительные программные модули и средства.
В качестве средств вычислительной техники должны быть применены
персональные ЭВМ (ПЭВМ) на верхнем уровне системы контроля и микропроцессорный
комплекс технических средств на нижнем уровне системы.
Комплекс технических средств системы контроля должен обеспечивать
бесперебойное функционирование системы.
2.3.6 Требования безопасности
При проектировании необходимо учесть требования нормативных материалов
для пожара- и взрывоопасных помещений класса Д.
Электрооборудование, входящее в комплекс средств автоматизации, должно
быть заземлено в соответствии с требованиями ПУЭ.
2.3.7 Противопожарные мероприятия
Выбор электрооборудования и приборов контроля, кабелей должен быть
произведен в зависимости от категории производства по взрывной, взрывопожарной
и пожарной опасности.
Монтаж системы контроля должен соответствовать действующей научно-
технической документации.
2.3.8 Штатное расписание
Примем срок разработки АС равным 65 дней.
Таблица 1.1 - Штат разработчиков и зарплата
|
Сотрудники
|
Кол-во
|
Ср. оклад, руб
|
|
Состав группы разработчиков
|
4
|
20000
|
|
Состав группы монтажников
|
1
|
18000
|
2.3.9 Калькуляция затрат на разработку
Рассчитаем стоимость амортизации оборудования по формуле
 ,
,
где  - затраты на возмещение износа оборудования, руб;
- затраты на возмещение износа оборудования, руб;
 - стоимость оборудования, руб;
- стоимость оборудования, руб;
 - годовая амортизация оборудования, %;
- годовая амортизация оборудования, %;
 - число рабочих дней в году, дн;
- число рабочих дней в году, дн;
 - сроки средней работы оборудования, дн.
- сроки средней работы оборудования, дн.
Таблица 1.2 - Затраты по статье «Амортизация»
|
Наименование
|
Кол-во
|
Общая ст-сть, руб
|
Норма амортизации
|
Кол-во дней
|
Всего, руб
|
|
Компьютер
|
4
|
84000
|
12,5 %
|
65
|
2763
|
|
Принтер
|
1
|
5500
|
12,5 %
|
65
|
180
|
|
Ноутбук
|
1
|
23000
|
12,5 %
|
65
|
756
|
|
ИТОГО
|
|
91800
|
|
|
3020
|
Рассчитаем заработанную плату по стадиям для разработчиков.
 ,
,
где  - заработная плата, руб;
- заработная плата, руб;
 - количество специалистов;
- количество специалистов;
 - средняя заработная плата в день, руб;
- средняя заработная плата в день, руб;
- количество рабочих дней, дн.
Таблица 1.3 - Расчет основной заработной платы разработчиков за весь срок
|
Состав
|
Кол-во
|
Всего,дней
|
Ср. окл., руб
|
Зп. всего, руб
|
ЕСН, руб
|
Всего, руб
|
|
Группа разработчиков
|
4
|
65
|
20000
|
172800
|
44929
|
217729
|
|
Группа монтажников
|
1
|
30
|
18000
|
18000
|
4680
|
22680
|
|
ИТОГО
|
5
|
|
|
190800
|
49609
|
240408
|
Расчет единого социального налога проводиться по формуле
 ,
,
где ЕСН - единый социальный налог, руб;
СЕСН - ставка единого социального налога.
В свою очередь СЕСН = 26 %.
Затраты на электроэнергию рассчитаем по формуле
 ,
,
где - затраты на электроэнергию, руб.;
- затраты на электроэнергию, руб.;
∑W- суммарная мощность, кВт;
Т - время работы, ч;
 -тарифная ставка, руб/кВт·ч.
-тарифная ставка, руб/кВт·ч.
Таблица 1.4 - Затраты по статье «Электроэнергия»
|
Наименование оборудования
|
Кол-во, ед
|
Суммарная потребляемая
электроэнергия, кВт·ч
|
Тарифная ставка, руб/кВт·ч
|
Итого, руб
|
|
Продолжительность работы,
520 ч
|
|
Компьютер
|
4
|
0,5
|
3,80
|
3952
|
|
Продолжительность работы,
520 ч
|
|
Принтер
|
1
|
0,3
|
3,80
|
593
|
|
Продолжительность работы,
520 ч
|
|
Ноутбук
|
1
|
0,1
|
3,80
|
198
|
|
Итого, руб
|
4743
|
Таблица 1.5 - Затраты по статье приборы, материалы и оборудование
|
Перечень материальных
ресурсов
|
Колво, шт
|
Цена за ед, руб
|
Сумма, руб
|
|
1. Расходные материалы
|
|
|
2500
|
|
2. Ноутбук
|
1
|
20000
|
20000
|
|
3. Компьютер
|
4
|
10000
|
40000
|
|
4. Принтер лазерный
|
1
|
5500
|
5500
|
|
5. Картридж для принтера
|
1
|
1500
|
1500
|
|
6. Роутер Wi-Fi
|
1
|
2000
|
2000
|
|
7. Щит ЩРН
|
5
|
1500
|
7500
|
|
8. Датчик давления ОВЕН
ПД100
|
8
|
2900
|
23200
|
|
9. Датчик уровня ОВЕН ДС.1
|
9
|
550
|
4950
|
|
10. Расходомер ТЕПЛОКОМ
ПРЭМ 80
|
1
|
32000
|
32000
|
|
11. Контроллер ОВЕН ПЛК150
|
1
|
9200
|
9200
|
|
12. Модуль ввода ОВЕН МВА8
|
4
|
4200
|
16800
|
|
13. Модуль ввода-вывода
ОВЕН МДВВ
|
3
|
3500
|
10500
|
|
14. Частотный
преобразователь ОВЕН ПЧВ
|
4
|
11200
|
33600
|
|
15. Устройство плавного
пуска Siemens 3RW40
|
6
|
16200
|
97200
|
|
ИТОГО, руб
|
306450
|
Составим калькуляцию предпроизводственных затрат.
Таблица 1.6 - Калькуляция затрат на разработку
|
Наименование расходов
|
Порядок расчета
|
Всего, руб
|
|
Материалы
|
Стоимость всех материальных
ресурсов
|
По нормам расхода
материалов
|
306450
|
|
Амортизация
|
Амортизационные отчисления
на спец. оборудование
|
12,5 % годовых от ст-ти
оборудования
|
3020
|
|
Электроэнергия
|
Затраты на электроэнергию
|
Табл. 1.4
|
4743
|
|
Основная зарплата
|
Основная заработная плата
разработчиков
|
Табл. 1.3
|
198800
|
|
Дополнительная зарплата
|
Оплата очередных и
дополнительных отпусков
|
10 % от основной зарплаты
|
19880
|
|
ЕСН
|
Налог
|
26 % от основной зарплаты
|
49609
|
|
Накладные расходы
|
Общехозяйственные расходы
организации
|
20 % от основной зарплаты
|
39600
|
|
Накопления
|
Отчисления на развитие
научно-исследовательской базы
|
20 % от общих затрат
|
124420
|
|
ИТОГО, руб
|
746522
|
Цену разработки проекта можно выразить следующей формулой
 =
=  +
+  +
+  +
+  ,
,
где  - цена проекта (программного продукта), руб;
- цена проекта (программного продукта), руб;
- затраты на разработку, руб;
- плановые накопления (20 %) к сумме затрат, руб;
- налог на добавленную стоимость (18 %) к оптовой цене, руб;
- процент за банковские операции (5 %).
= 746522 + 149304 + 134374 + 37326 = 1067526 руб.
Определение прибыли
Общая прибыль определяется по следующей формуле
 = - ,
= - ,
где - общая прибыль, руб;
- затраты на разработку, руб;
 = 1067526- 746522 = 321004 руб.
= 1067526- 746522 = 321004 руб.
Чистая прибыль определяется по следующей формуле
 = -
= -  ,
,
где - чистая прибыль, руб.;
- налог на прибыль, составляющий 24 % от общей прибыли, руб.
= 321004 - 77041 = 243963 руб.
Т а б л и ц а 1.7 - Обоснование периода разработки
|
Дата начала
|
Дата завершения
|
Действия
|
|
11.03.2013
|
21.03.2013
|
Разработка технического
задания
|
|
22.03.2013
|
01.04.2013
|
Сбор и анализ информации об
объекте автоматизации
|
|
02.04.2013
|
06.04.2013
|
Оформление документации
|
|
07.04.2013
|
04.04.2013
|
Выбор средств автоматизации
и технологического оборудования
|
|
05.04.2013
|
20.04.2013
|
Выбор конкретного
оборудовании
|
|
21.04.2013
|
24.04.2013
|
Оформление документации
|
|
25.04.2013
|
27.04.2013
|
Анализ вредных факторов
воздействующих на человека при эксплуатации АТП
|
|
28.04.2013
|
01.05.2013
|
Оформление документации
|
|
02.05.2013
|
04.05.2013
|
Анализ влияния на
экологическое состояние окружающей среды АТП
|
|
05.05.2013
|
11.05.2013
|
Оформление документации
|
|
12.05.2013
|
14.05.2013
|
Расчет себестоимости
автоматизации системы водоснабжения
|
|
15.05.2013
|
22.05.2013
|
Оформление документации
|
3. Изучение технологического объекта управления
.1 Общие сведения
Система водоснабжения является достаточно сложным объектом автоматизации
и состоит из нескольких составных частей, которые удалены друг от друга на
различные расстояния до 1 километра.
Основными задачами системы автоматизации водоснабжения является
непрерывная подача воды в водопровод потребителя, поддержание в нем заданного
давление, а так же защита от аварийных ситуаций, таких как недостаток воды в
скважине, переполнение резервуара и других, которые будут подробно разобраны в
последующих разделах данного отчета. Поэтому, самой главной составная частью
данного объекта автоматизации является скважина, т.к. собственно она является
источником так называемого сырья, в роли которого в данном случае выступает
вода. Данная система водоснабжения ориентирована на работу с несколькими
скважинами. В данном случае предполагается наличие двух групп по две скважины,
удаленных друг от друга на расстоянии около 500 метров. Данные скважины
оборудованы погружными насосами, которые осуществляют процесс забора воды из
скважины и передачи ее по трубопроводу.
Второй составной частью данного объекта автоматизации является резервуар,
служащий для накопления некоторого объема воды, что является необходимым для
систем водоснабжения такого типа. Резервуар соединен трубопроводами со всеми
скважинами с одной стороны (насосная первого подъема) и насосной второго
подъема с другой стороны.
Третьим, заключительным звеном данной системы водоснабжения является
насосная станция второго подъема. Данное помещение оборудовано насосами,
соединенными трубопроводом с резервуаром. Данные насосы осуществляют
непосредственный забор воды из резервуара и подачу ее в трубопровод потребителя.
Как уже было сказано ранее, основными задачи перед системой водоснабжения
являются:
непрерывная подача воды;
поддержание заданного давления в трубопроводе потребителя;
защита от всевозможных аварийных ситуаций;
возможность контроля технологического процесса из единого
диспетчерского пункта;
возможность перевода системы в режим ручного управление
технологическим процессом.
Поставленные задачи являются непростыми и их невозможно решить должным
образом без применения современных средств автоматизации. В данном отчете
освещен процесс проектирования системы автоматизации для данной системы
водоснабжения.
Рисунок 1.1 - Объект автоматизации
На насосных станциях автоматизируются: пуск и остановка насосных
агрегатов и вспомогательных насосных установок; контроль и поддержание заданных
параметров (например, уровня воды, подачи, напора и т.д.); прием импульсов
параметров и передача сигналов на диспетчерский пункт. Для наблюдения за
параметрами работы насосной станции служат различные датчики, которые
преобразуют контролируемую величину в электрический сигнал, поступающий в
исполнительный механизм.
В автоматизированных системах управления насосными агрегатами применяют
следующие типы датчиков и реле:
датчики уровня - для подачи импульсов на включение и остановку
насосов при изменении давления в трубопроводе;
датчики или электроконтактные манометры, - для управления цепями
автоматики при изменении давления в трубопроводе;
струйные реле - для управления цепями автоматики в зависимости
от направления движения воды в контролируемом трубопроводе;
реле времени - для отсчета времени, необходимого для протекания
определенных процессов при работе агрегатов;
термические реле - для контроля за температурой подшипников и
сальников, а в некоторых случаях - за выдержкой времени;
вакуум реле - для поддержания определенного разрежения в насосе
или во всасывающем трубопроводе;
промежуточные реле - для переключения отдельных цепей в
установленной последовательности;
реле напряжения - для обеспечения работы агрегатов на
определенном напряжении;
аварийные реле - для отключения агрегатов при нарушении
установленного режима работы.
Принципы и возможности регулирования:
точное поддержание заданного давления;
возможность ручного или автоматического суточного изменения
давления;
энергосбережение за счет исключения избыточного давления;
энергосбережение за счет оптимизации пусковых режимов;
многодвигательное управление;
защита оборудования и водопровода;
индикация, диспетчеризация и архивация параметров.
Основной смысл использования автоматизированных систем управления (АСУ) в
насосных установках заключается в том, чтобы привести в соответствие режим
работы насосов с режимом работы водопроводной или канализационной сети.
Водопотребление непрерывно изменяется во времени по случайно-вероятностным
законам. Диапазон изменения водопотребления довольно широк. Чтобы отслеживать
эти изменения, необходимо непрерывно регулировать режим работы насосной
установки.
Процесс регулирования осложнен несоответствием характеристик центробежных
насосов и трубопроводов. Для увеличения подачи воды по трубопроводу напор на
насосной станции надо увеличивать, а характеристики центробежных насосов
таковы, что при увеличении подачи воды напор, развиваемый насосом, падает. В
периоды уменьшенного водопотребления системы водоснабжения работают с
избыточным напором, который частично гасится в дросселирующих устройствах или в
водоразборной арматуре у потребителя. Под воздействием избыточных напоров
увеличиваются утечки и непроизводительные расходы воды, возникают повышенные
механические напряжения в стенках труб.
Регулированием частоты вращения насоса его рабочие параметры приводятся в
соответствие с режимом работы водопроводной или канализационной сети. Чтобы
изменить частоту вращения насоса, его оснащают регулируемым приводом, то есть
подключают электродвигатель насоса через преобразователь частоты. Значение
частоты вращения насоса, с которой он должен работать в тот или иной момент
времени, определяется АСУ, т.е. режимом работы насосной установки. Требуемое
значение частоты вращения устанавливается АСУ автоматически в зависимости от
многих факторов. К числу факторов, влияющих на частоту вращения насоса,
относятся: расход воды в системе, уровень воды в резервуарах, значения статического
и динамического противодавления, количество параллельно работающих насосов,
количество насосных установок, подающих воду в сеть.
До сих пор наиболее распространенным способом регулирования остается
дросселирование напорной задвижкой. Достоинством данного способа является
простота его реализации, а существенным недостатком - неэкономичность.
Насосная установка работает с повышенным напором из-за увеличения
гидравлического сопротивления системы трубопроводов. Повышение напора в
результате изменения гидравлического сопротивления не является постоянным, а
зависти от расхода жидкости, т.е. влияет на значение динамической составляющей
напора, развиваемого насосной установкой, изменяет крутизну характеристики
трубопровода.
При работе насосной установки с подачей меньше расчетной возникает
несоответствие между напором, развиваемым насосом, и напором, требуемым для
подачи того или иного количества жидкости (т.е. превышение напора насоса).
Сравнение характеристики центробежных насосов и трубопроводов показывает, что
при уменьшении подачи требуемый напор также уменьшается, а развиваемый насосом
напор увеличивается.
Разность этих напоров и есть превышение напора сверх требуемого. Из
графика совместной работы насоса и трубопровода видно, что значение превышения
напора тем больше, чем круче характеристики насоса и трубопровода, и чем меньше
фактическая подача насоса по сравнению с расчетной. На превышение напора
нерационально расходуется дополнительная мощность.
Итак, наилучшим является режим работы, при котором развиваемый насосом
напор равен напору, требуемому для подачи воды. Такой режим, в частности, может
быть реализован при управлении частотой вращения насоса с использованием
частотно-регулируемого электропривода.
3.2 Требования к насосным станциям
В системе производственного водоснабжения используются следующие насосные
станции: насосные станции 1-го подъема; станции 2-го подъема; станции
оборотного водоснабжения (циркуляционные); повысительные; перекачивающие;
шламовые и дренажные.
Насосные станции 1-го подъема (НС1) забирают воду из источника и подают
ее на очистные сооружения, или, если очистка не требуется, непосредственно в
резервуар или распределительную сеть - в зависимости от принятой схемы
водоснабжения.
Они располагаются обычно вне территории предприятия на берегу водоема.
НС1 должны располагаться на местах, которые не затапливаются в паводок, но и
должны обеспечивать надежный забор воды при наинизшем ее уровне. Поэтому чаще
всего строятся станции заглубленного типа, когда основание станции находится
ниже уровня воды.
НС1 выполняют цилиндрической формы. Особое внимание обращают на
компактность размещения оборудования и уменьшения диаметра здания. Поэтому
широко используются насосы вертикального типа, у которых двигатель и арматура
располагаются на втором этаже. Число насосов - минимально возможное.
На предприятиях, предъявляющих различные требования к качеству воды, на
НС1 могут быть установлены насосы, подающие воду как на очистные сооружения,
так и потребителям неочищенной воды. Таким образом объединяются насосные
станции НС1 НС2.
Часто также, объединяются НС1 и водоприемные камеры в одно сооружение.
Насосные станции 2-го подъема служат для подачи воды потребителям, обычно
из резервуаров чистой воды. Они, как правило, объединяются со станциями оборотного
водоснабжения. Такие объединенные станции носят название циркуляционных. Они
обслуживают одну или несколько систем оборотного водоснабжения, поэтому могут
иметь несколько групп соответствующих насосов.
Циркуляционные станции располагаются в зданиях прямоугольной формы с
шириной пролета 6, 12, 18 м. Насосы этих станций забирают воду из резервуаров
теплой и охлажденной отработавшей воды. Эти резервуары, как правило, заглублены
ниже уровня земли. Поэтому и пол машинного зала насосной станции тоже заглублен,
чтобы обеспечить необходимую высоту всасывания насосов.
При температуре воды выше 30°C насосы устанавливают так, чтобы они были под заливом при
нижнем уровне воды в резервуаре. При температуре воды больше 60°C надо еще обеспечить достаточный
подпор на входе в насосы.
Сами насосы располагаются в зале так, чтобы исключить лишние повороты
трубопроводов. Прокладку трубопроводов выполняют в каналах или непосредственно
по полу. Последнее предпочтительнее, так как дешевле. Над трубопроводами
сооружают переходные мостики.
В заглубленных насосных станциях предусматривают защиту от затопления при
авариях. Это либо слив в канализацию, либо установка дренажного насоса.
Повысительные насосные станции (станции подкачки) предназначены для
повышения напора воды для отдельных объектов, цехов или агрегатов.
Перекачивающие станции служат для подъема использованной воды от
отдельных низкорасположенных потребителей в общую систему отводящих
трубопроводов.
Шламовые насосные станции предназначены для перекачки в отстойники или
шламонакопители различных отходов производства (шламов, хвостов горных пород,
шлаков и др.).
Дренажные насосные станции и установки служат для откачки грунтовых или
случайных вод из различных заглубленных мест.
К каждой системе водоснабжения, а следовательно и ее насосной станции
предъявляются определенные требования в отношении надежности. По уровню
требований надежности системы водоснабжения и насосные станции делятся на три
категории:
к 1-й категории надежности относятся системы водоснабжения и
насосные станции предприятий металлургической, нефтеперерабатывающей,
нефтехимической и химической промышленности и электростанций. На этих
предприятиях не разрешаются перерывы в подаче воды. Снижение подачи допускается
не более чем на 30% от расчетной подачи и не более чем на 3 суток. Допускается
снижение расхода ниже этого предела не более 10 мин.
к 2-й категории относятся системы предприятий угольной,
горнорудной, нефтедобывающей, машиностроительной и др. видов промышленности, на
которых допускается перерыв в подаче не более чем на 5 часов, а также снижение
подачи на 30% до 15 суток;
к 3-й категории относятся системы мелких промышленных
предприятий, допускающие перерыв в подаче воды до одних суток, а также снижение
подачи на 30% не более чем на месяц.
4.
Разработка концепции автоматизированной
системы управления
4.1 Выбор технологического оборудования
.1.1 Выбор программируемого логического контроллера
Программируемый логический контроллер представляет собой
специализированный вычислитель на базе микропроцессора, предназначенный для
управления технологическими процессами и различным оборудованием в реальном
масштабе времени, в том числе для экономичного варианта замены устаревшего
электрооборудования и релейной логики при модернизации уже существующего технологического
оборудования. ПЛК является универсальным техническим средством, позволяющим в
кратчайшие сроки создавать технические комплексы для различных областей
применения. Алгоритм управления описывается в виде совокупности логических
выражений (программы) на специально разработанном языке программирования, что в
совокупности с мощными отладочными средствами определяет легкость ввода в
эксплуатацию и дальнейшее обслуживание технических комплексов.
Основным свойством ПЛК является циклический характер выполнения
программы, время цикла (10 мс) и определяет предел применимости данного типа
устройств в с системах реального времени.
Каждый цикл ПЛК делится на три этапа
прием информации от объекта управления
принятие решения на основании алгоритма управления (программы)
формирования управляющего воздействия на объект управления.
Входная информация представлена в виде дискретных сигналов, поступающих
от различного рода датчиков и переключателей, отражающих текущее состояние
оборудования, положение исполнительных механизмов и органов ручного управления.
Процесс принятия решения состоит в последовательном вычислении логических
выражений, составляющих тело программы.
Действия ПЛК состоят во включении и выключении дискретных выходных
сигналов, управляющих внешними устройствами, в качестве которых могут быть
применены пускатели, устройства сигнализации и индикации.
Для данной автоматизированной системы управления была выбрана разработка
российской компании «Овен» под названием «ПЛК150».
Основное применение данной линейки контроллеров: построение
распределенных систем управления и диспетчеризации, причем как на базе
проводных, так и беспроводных средств.
Основные отрасли, в которых контроллеры нашли применение:
производство и модернизация автоматики котельных;
управление малыми станками и механизмами;
климатическое оборудование;
торговое оборудование;
пищеперерабатывающие и упаковочные аппараты;
системы HVAC, водоканалы, ИТП, ЦТП;
строительное производство;
системы сбора данных и диспетчеризации.
Контроллер ОВЕН ПЛК150 выполнены в полном соответствии со стандартом ГОСТ
Р 51840 (IEC 61131-2), что обеспечивает высокую аппаратную надежность.
По электромагнитной совместимости контроллеры соответствуют критерию А по
соответствующим ГОСТ-ам, что подтверждено неоднократными испытаниями изделия.
Контроллеры не содержат операционной системы (платформа Embedded), что
повышает их отказоустойчивость.
Изначально в контроллеры данной линейки заложены мощные аппаратные
ресурсы, Мощный процессор и достаточно большое количество памяти, как ОЗУ, так
и ПЗУ (Flash).
Программирование контроллеров осуществляется в профессиональной,
распространенной, и совершенно бесплатной для покупателей ОВЕН среде CoDeSys
v.2.3.x. Ознакомиться с системой CoDeSys, а так же скачать документацию по
работе в системе можно на нашем сайте.
Особенностью контроллеров является небольшое количество точек
ввода\вывода и расширенным количеством интерфейсов на борту. Каждый контроллер
имеет порт Ethernet и от 2 до 3 последовательных портов RS232 (RS485) в
зависимости от модели. Помимо поддержки самых распространенных протоколов
обмена ModBus (RTU, ASCII), ОВЕН, DCon поддержана возможность работы напрямую с
портами контроллера, что позволяет подключать внешние устройства устройства с
нестандартными протоколами.
Контроллер имеет встроенные часы, что позволяет создавать системы
управления с учетом реального времени.
Встроенный аккумулятор, позволяющий организовать ряд дополнительных
сервисных функций: возможность кратковременного пережидания пропадания питания,
перевод выходных элементов в безопасное состояние.
Наличие Flash памяти позволяет организовывать архивирование данных на
самом ПЛК.

Рисунок 4.1 - Программируемый логический контроллер ОВЕН ПЛК150
.1.2 Выбор модулей ввода-вывода
Модули ввода и вывода являются неотъемлимой частью системы автоматизации,
так как. Выбранный программируемый логчиеский контроллер изначально
поставляется с небольшим количеством входов и выходов, которых недостаточно для
построения полноценной АСУ. Так же перед нами встает проблема распределенности
- вся система распределена по территории и расстояние между ее частями может
достигать 1 киллометра.
В данной ситуации нам необходимы модули вводы и вывода, которые позволяют
работать с датчиками и исполнительными механизмами локально и передавать сигнал
другим устройствам по интерфейсу RS485.
Под данные требования отлично подходят разработки фирмы «Овен», на
которых и был остановлен выбор.
1.
4.1.2.1 Модуль ввода аналоговый (МВА8)
Восьмиканальный универсальный измерительный модуль ввода для
распределенных систем управления в сети RS-485.
Может использоваться в качестве модуля расширения входов для ОВЕН ПЛК или
программируемых контроллеров других производителей.
Модуль ввода МВА8 работает в сети RS-485 при наличии в ней «мастера», при
этом сам МВА8 не является «мастером» сети.

Рисунок 4.2 - Модуль ввода аналоговый ОВЕН МВА8
Основные функции:
восемь универсальных входов для подключения широкого спектра
датчиков температуры, давления, влажности, расхода, уровня и других физических
величин;
цифровая фильтрация и коррекция входных сигналов,
масштабирование показаний датчиков с унифицированным выходным сигналом
(активных датчиков);
передача измеренных значений по интерфейсу RS-485;
поддержка распространенных протоколов Modbus (ASCII, RTU), DCON,
ОВЕН;
помехоустойчивость благодаря импульсному источнику питания от 90
до 264 В частотой от 47 до 63 Гц;
возможность конфигурирования на ПК.
4.1.2.2 Модуль вывода управляющий (МВУ8)
Восьмиканальный модуль управления исполнительными механизмами для
распределенных систем в сети RS-485 (протоколы ОВЕН, Modbus, DCON).
Модуль может использоваться:
в качестве удаленного блока выходных устройств для SCADA-системы
или программируемых контроллеров (ОВЕН ПЛК или др.);
для интеллектуального управления исполнительными механизмами.
МВУ8 работает в сети RS-485 при наличии в ней «мастера», при
этом сам МВУ8 не является «мастером» сети.
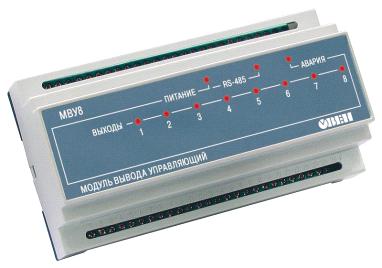
Рисунок 4.3 - Модуль вывода управляющий ОВЕН МВУ8
Основные функции:
до 8 каналов управления различными исполнительными механизмами
(ИМ): 2-х позиционными (ТЭНы, двигатели, клапаны); 3-х позиционными (задвижки,
краны), как с датчиком положения, так и без него; ИМ с аналоговым управлением;
8 встроенных выходных элементов с возможностью расширения до 16
путем подключения 8-канального модуля дискретных выходных элементов ОВЕН МР1;
непосредственное управление ИМ по сигналу SCADA-системы или
программируемого контроллера (ШИМ с высокой точностью, ON/OFF);
генерация управляющего ШИМ-сигнала заданной скважности (или
аналогового сигнала) по расчетной мощности, полученной из сети RS-485 от
ПИД-регулятора или его модели в SCADA-системе; управление сложными системами
ИМ, например системой «нагреватель - холодильник», группой ТЭНов, системами
дискретной сигнализации и т.п.;
контроль нахождения в заданных пределах значения физической
величины, поступающей из сети RS-485; автоматический перевод ИМ в аварийный
режим работы при нарушении сетевого обмена;
поддержка распространенных протоколов Modbus (ASCII, RTU), DCON,
ОВЕН;
помехоустойчивость благодаря импульсному источнику питания от 90
до 264 В частотой от 47 до 63 Гц;
Возможность конфигурирования на ПК.
.1.2.3 Модуль дискретного ввода-вывода
Модуль дискретных входов и выходов для распределенных систем в сети
RS-485 (протоколы ОВЕН, Modbus, DCON).
Модуль может использоваться совместно с программируемыми контроллерами
ОВЕН ПЛК или др.
МДВВ работает в сети RS-485 при наличии в ней «мастера», при этом сам
МДВВ не является «мастером» сети.

Рисунок 4.4 - Модуль дискретного ввода-вывода ОВЕН МДВВ
Основные функции:
12 дискретных входов для подключения контактных датчиков и
транзисторных ключей n-p-n типа;
возможность использования любого дискретно входа в режиме
счетчика (максимальная частота сигнала - 1 кГц);
8 встроенных дискретных выходных элементов в в различных
комбинациях: э/м реле 8 А 220 В; оптотранзисторный ключ 400 мА 60 В;
оптосимистор 0,5 А 300 В; для управления твердотельным реле;
возможность генерации шим-сигнала любым из выходов;
автоматический перевод исполнительного механизма в аварийный
режим работы при нарушении сетевого обмена;
поддержка распространенных протоколов Modbus (ASCII, RTU), DCON,
ОВЕН;
помехоустойчивость благодаря импульсному источнику питания от 90
до 264 В частотой от 47 до 63 Гц, гальванической развязке в цепях выходов,
питания и интерфейса RS-485 и применению защитных элементов в цепях дискретных
входов;
возможность конфигурирования на ПК.
.2 Частотный преобразователь
Частотый преобразователь предназначен для управления частотой вращения
асинхронных двигателей в составе приводов для работы в промышленных установках,
системах отопления, вентиляции и кондиционирования воздуха. частотный
преобразователь так же называемый в профессиональной среде: частотник,
векторный преобразователь частоты, частотный регулятор, частотный регулятор
мощности, частотний перетворювач, частотник.
Особенности частотных преобразователей данной серии:
съемная локальная панель оператора, с ЖКИ дисплеем и встроенным
потенциометром, позволяет производить программирование и оперативную настройку
параметров четырех преобразователей «ОВЕН ПЧВХХХ», в режиме «горячее
подключение»;
выходные инверторы серии «ОВЕН ПЧВXXХ» выполнены на базе
новейших IGBT-модулей «SEMIKRON»;
конструкция интеллектуальной системы охлаждения позволяет
снизить температуру перегрева силовых компонентов встроенным вентилятором и
способом «холодная плита».
Основные функциональные возможности:
алгоритм управления: частотный (U/F) и векторный (V+);
автоматическая адаптация двигателя (автоматическое измерение и
запись актуальных параметров двигателя для использования в алгоритмах
управления);
защита от аварийных режимов, по напряжению, току, температуре,
изоляции;
управление группой двигателей;
работа с несколькими наборами параметров, (для нескольких
режимов работы или электродвигателей);
копирование наборов, (программирование нескольких приводов с
помощью одной локальной панели оператора);
ручное управление, (встроенный потенциометр на локальной панели
оператора);
интерфейс RS-485;
встроенный алгоритм оптимизации энергопотребления;
мониторинг энергопотребления;
счетчик моточасов;
индикация портов и параметров;
выполнение логических операций встроенным ПЛК;
автоматический поиск частоты вращения;
выбор параметров «Разгон/Торможение»;
программирование S- образной характеристики скорости;
программирование ПИ - регулятора;
журнал отказов, счет событий;
управление механическим тормозом;
пароль доступа.

Рисунок 4.5 - Частотный преобразователь ОВЕН ПЧВ
4.3 Датчики давления
Датчики серии ОВЕН ПД100-ДИ предназначены для непрерывного преобразования
избыточного давления измеряемой среды в унифицированный сигнал постоянного тока
от 4 до 20 мА.
Датчики избыточного давления предназначены для систем автоматического
регулирования, управления и индикации в различных областях промышленности,
жилищно-коммунального хозяйства, на тепловых пунктах и т.п.
Функции и особенности преобразователя:
измерение избыточного давления нейтральных к нержавеющей стали
AISI 316L или керамике (Al2O3) сред (воздух, пар, различные жидкости);
преобразование давления в унифицированный сигнал постоянного
тока от 4 до 20 мА;
верхний предел измеряемого давления (ВПИ) - ряд значений от 125
Па до 10 (25*) МПа;
перегрузочная способность - от 200% ВПИ и выше;
класс точности - 0,25;
степень зашиты корпуса датчика давления - IP65;
помехоустойчивость удовлетворяют требованиям к оборудованию
класса А по ГОСТ Р 51522.

Рисунок 4.6 - Преобразователь давления ОВЕН ПД100
4.4 Датчики уровня
Датчики уровня кондуктометрического типа, предназначены для измерения и
сигнализации уровней жидкостей.
Принцип действия датчиков основан на изменении электропроводности между
общим и сигнальными электродами в зависимости от уровня измеренного вещества.
Потребитель имеет право укорачивать или наращивать длину поставляемых
электродов датчиков, до требуемой по условиям применения.

Рисунок 4.7 - Датчик уровня ОВЕН ДС.1
4.5 Преобразователь расхода
Преобразователи расхода электромагнитные фланцевые типа ПРЭМ-ГФ
предназначены для преобразования объемного расхода и объема электропроводных
жидкостей в их показания, регистрации и представления результатов измерений на
внешние устройства (тепловычислители, регуляторы, устройства централизованного
контроля и другие вторичные приборы) и могут быть применены на объектах теплоэнергетического
комплекса, на промышленных предприятиях и в жилищно-коммунальном хозяйстве.
Преобразователи типа ПРЭМ выпускаются с тремя классами исполнения с
различными динамическими диапазонами B1, C1, D; имеют различные динамические
диапазоны в прямом и обратном направлениях ; числоимпульсные выходы имеют
несколько режимов (реверсивный, с учетом направления потока; компаратор;
индикатор ошибки измерения), настраиваемых при заказе; по умолчанию
устанавливается реверсивный режим.
Прибор имеет аппаратную защиту от несанкционированного изменения
калибровочных коэффициентов, в нем ограничен доступ к изменению настроечных
параметров и цена импульса устанавливается на заводе.
Прибор обладает следующими характеристиками:
температуры измеряемой среды в диапазоне от 0 до +150°C;
температуры окружающей среды от -10 до +50°С;
рабочее давление измеряемой среды до 1,6 МПа;
питание преобразователей осуществляется от источника постоянного
тока с номинальным напряжением 12 В с мощностью 5 Вт.
минимальная длина прямых участков трубопровода до и после
преобразователя - 2 Ду;
выходные сигналы: один или два числоимпульсных сигнала;
токовый сигнал в диапазоне изменения тока (4-20) мА,
пропорциональный измеренному расходу;
цифровой сигнал в стандарте интерфейса RS485 или RS232.

Рисунок 4.7 - Преобразователь расхода Теплоком ПРЭМ-80
4.6 Выбор программного обеспечения
.6.1 Среда разработки
CoDeSys - инструментальный программный комплекс промышленной
автоматизации. Производится и распространяется компанией 3S-Smart Software
Solutions GmbH (Кемптен, Германия). Название CoDeSys является акронимом от
Controller Development System. Версия 1.0 была выпущена в 1994 году. С ноября
2012 изменено написание на CODESYS.
Основой комплекса CODESYS является среда разработки прикладных программ
для программируемых логических контроллеров (ПЛК). Она распространяется
бесплатно и может быть без ограничений установлена на нескольких рабочих
местах.
В CODESYS для программирования доступны все пять определяемых стандартом
IEC 61131-3 (МЭК 61131-3) языков:
- IL (Instruction List) ассемблер-подобный язык;
ST (Structured Text) Pascal-подобный язык;
- LD (Ladder Diagram) Язык релейных схем;
FBD (Function Block Diagram) Язык функциональных блоков;
- SFC (Sequential Function Chart) Язык диаграмм состояний.
В дополнение к FBD поддержан язык программирования CFC (Continuous
Function Chart) с произвольным размещением блоков и расстановкой порядка их
выполнения.
В CODESYS реализован ряд других расширений спецификации стандарта IEC
61131-3. Самым существенным из них является поддержка Объектно-ориентированного
программирования (ООП).
Встроенные компиляторы CODESYS генерируют машинный код (двоичный код) ,
который загружается в контроллер. Поддержаны основные 16-и и 32-х разрядные
процессоры: Infineon C166, TriCore, 80x86, ARM (архитектура), PowerPC, SH, MIPS
(архитектура), Analog Devices Blackfin, TI C2000/28x и другие.
При подключении к контроллеру, среда программирования CODESYS переходит в
режим отладки. В нем доступен мониторинг/изменение/фиксация значений
переменных, точки останова, контроль потока выполнения, горячее обновление
кода, графическая трассировка в реальном времени и другие отладочные
инструменты.
4.6.2 Языки программирования
LAD (Ladder Diagram) - язык релейных диаграмм. Редактор отображает
программу в графическом представлении, похожем на электрическую монтажную
схему. Логические схемы позволяют программе имитировать протекание
электрического тока от источника напряжения через ряд логических условий на входах,
которые активизируют условия на выходах. Источником напряжения выступает шина,
находящаяся слева.
Основными элементами являются нормально замкнутые и нормально разомкнутые
контакты.
Соответственно, замкнутые контакты позволяют потоку сигнала протекать через
них к следующему элементу, разомкнутые контакты - препятствуют протеканию
потока сигнала.
Логика делится на сегменты (Network), программа исполняется слева направо
и сверху вниз.
Особенностями редактора LAD является простота в использовании и понимании
для начинающих программистов.(Function Block Diagram) - функциональные блочные
диаграммы. Этот редактор отображает программу в виде обычных логических схем.
Контактов нет, но есть эквивалентные функциональные блоки. В данном редакторе
не используется понятие «поток сигнала», как в LAD, его выражает аналогичное
понятие потока управления через логические блоки FBD.
Потоком сигнала называется путь состояния «1» через элементы FBD. Логика
программы вытекает из связей между функциональными блоками, обозначающими
команды.
Графическое представление функционального плана хорошо отражает процесс
выполнения программы.
IL (Instruction List) - список
инструкций. Данный редактор дает возможность
создавать программы, вводя мнемонические обозначения команд. В этом редакторе
можно создавать программы, которые невозможно создать в редакторах LAD и FBD.
Программирование в IL очень похоже на программирование на Ассемблере, несколько
специфическое.
ПЛК выполняет команды в порядке, определяемом программой, сверху вниз,
затем начинает сначала.
С помощью редактора IL всегда можно посмотреть или отредактировать
программы, созданные на LAD или FBD, обратное не всегда возможно.
4.6.3 Средства разработки человеко-машинного интерфейса
CoDeSys HMI - это система исполнения визуализаций, созданных в среде
программирования CoDeSys. Если проект содержит визуализацию, то после запуска
CoDeSys HMI она открывается в полноэкранном режиме. Пользователь может
управлять ею посредством мыши или клавиатуры. Это возможно, даже если файл
проекта CoDeSys доступен только для чтения. На экране отображается только
визуализация.
Пользователь не имеет возможности редактировать программу. Меню и панели
управления CoDeSys не доступны в ‘операционной версии’. Если необходимо,
функции управления и контроля проекта должны быть сопоставлены элементам
визуализации при ее создании. Для этого существуют специальные команды,
доступные в диалогах конфигурации элемента визуализации. Глубокая интеграция
системы программирования CoDeSys и CoDeSys HMI дает следующие преимущества:
Отсутствие необходимости определять вспомогательные списки
переменных. Все переменные проекта доступны в визуализации непосредственно.
Возможность применения выражений в визуализации. Например,
«Variable1 + Variable2 + 5».
Концепция заместителей позволяет создавать
объектно-ориентированные визуализации и использовать их так же, как экземпляры
функциональных блоков.
Трассировщик значений переменных и Менеджер рецептов CoDeSys
доступны в CoDeSys HMI.HMI предоставляет возможность разрабатывать человеко-машинный
интерфейс в интегрированной среде разработки и использовать его в любом другом
совместимом окружении.
Разработка человека-машинного интерфейса производится в среде CoDeSys,
которая одновременно используется и для программирования ПЛК. Для использования
разработанного человеко-машинного интерфейса используется специальная
программа, которая позволяет запускать его на любом компьютере, использующем
одну из поддерживаемых операционных систем.
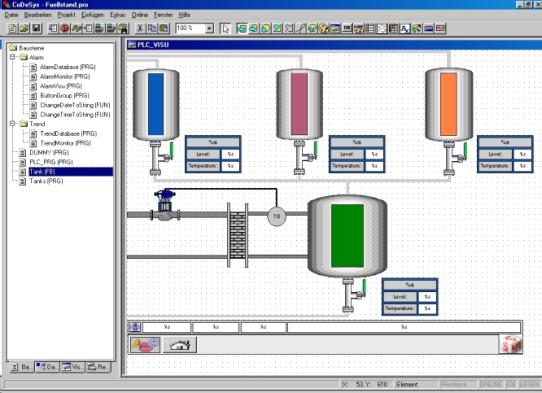
Рисунок 4.7 - Окно программы CoDeSys HMI
Перечислим плюсы использования CoDeSys HMI:
) Быстродействие, надежность, очень скромные требования к
компьютеру. CoDeSys HMI работает с контроллером напрямую по родному протоколу
связи. Т.е. время обновления данных и время реакции на команды оператора в HMI
по определению лучше, чем через OPC и тем более DDE. Данный вид визуализации
нетребователен к таким ресурсам, как процессорное время и оперативная память,
что позволяет сократить расходны на приобретении оборудования.
) Вся вычисления происходят в контроллере. Можно работать с быстро
изменяющимися данными, даже при медленном и не надежном канале связи.
) Визуализацию CoDeSys можно запустить не только на компьютере.
Если ПЛК оснащен панелью или выходом для подключения дисплея, то визуализацию
можно запустить прямо в ПЛК. При этом нет необходимости производить какие-либо
изменения в программ.
) Простота применения. Все картинки рисуются прямо в среде
программирования и элементарно связываются с переменными проекта. Отпадает
необходимость в конфигурировании серверов, а так же надобность в сторонних
инструментах - все интегрировано в одной среде.
4.7 Состав каналов и требования к ним
САУ рассматриваемой установки имеет в своем составе большое число каналов
различного типа. Измерительные каналы САУ обеспечивают измерение
технологических параметров и сравнение с заданными значениями уставок
(предупредительных и аварийных). По каналам управления производится выдача
команд на управление исполнительными механизмами.
Все сигналы в системе могут быть разделены на входные и выходные,
аналоговые и дискретные. В качестве входных САУ принимает аналоговые и
дискретные сигналы. Под дискретными сигналами понимаются сигналы от датчиков
типа «сухой» контакт. Источниками входных аналоговых сигналов являются датчики
давления. Источниками входных дискретных сигналов являются концевые выключатели
и другие сигнализаторы положения (состояния) технологического оборудования
объекта, а также клавиши и кнопки пультов управления.
Выходные дискретные сигналы обеспечивают выдачу сигналов управления на
пускатели исполнительных механизмов, обмотки соленоидов кранов и другое
технологическое оборудование объекта. Выходные аналоговые сигналы необходимы
для выполнения задач регулирования.
4.8 Контроль обрыва датчиков
В состав САУ входит большое число аналоговых и дискретных датчиков.
Очевидно, что контроль и диагностика обрыва в цепях датчиков играет важную роль
в повышении надежности и качества системы.
Контроль цепи аналоговых датчиков реализован программно-аппаратно. Если
значение измеряемого параметра лежит внутри диапазона измерения и линия связи
датчика с преобразователем не нарушена, то значение напряжения на выходе
преобразователя будет в пределах от 1 до 5 В. В случае, если значение
напряжения, измеренное на выходе аналогового преобразователя, выходит за
пределы рабочего диапазона, диагностируется обрыв линии связи датчика с
преобразователем.
4.9 Контроль исправности насосов
Контроль исправности насосов реализован программно. Все насосы системы
приводятся в действие устройствами планого пуска или частотными
преобразователями. Каждое из таких устройств сообщает о своем статусе
посредством дискретных сигналов, за которыми оператор имеет возможность
наблюдать из диспетчерского пункта.
Помимо контроля состояния пусковых устройств, каждая скважина оснащается
датчиками давления. Давление в водопроводе позволяет судить о том, происходит
забор воды из скважины или нет. Если система подает сигнал старта пусковому
устройству, но давление со временем в трубопроводе не растет, то данная
ситуация расценивается как нештатная.
b.
4.10 Резервирование
В данной системе водоснабжения используется резервирование сетевых
насосов, что является мерой по повышению надежносити. Используемая схема
резервирования предполагает, что в работе обычно находится не более двух
сетевых насосов, в зависимости от текущего давления. В часы малой загрузки
работает только один сетевой насос, однако, если давление продолжает
понижаться, а первый насос работает на первую мощность, в работу включается второй
насос.
Алгоритм управления насосами расчитан на последовательную смену ведущего
первого насоса в зависимости от времени наработки каждого, что позволяет
продлить общий ресурс работы.
4.11 АРМ оператора
Создание эффективного автоматизированного рабочего места (АРМ) -
серьезная задача при автоматизации любого производства. Архитектура АРМ СИ
(сменного инженера) с годами менялась вместе с развитием технических средств и
изменениями требовании заказчиков. В современных условиях основа для создания
АРМ - это персональные компьютеры.
Основным фактором при выборе ПЭВМ в качестве основы АРМ послужила широта
распространения этой архитектуры, из чего вытекают простота приобретения и
модернизации, а так же наличие у заказчика специалистов по обслуживанию, не
говоря уже о таком преимуществе, как доступность системного программного
обеспечения.
В данной системе используется персональный компьютер с установленным
программным обеспечением CoDeSys HMI, основной задачей работы которого является
наглядный контроль за состояние всей системы, а так же сбор статистики и
архивирование данных. ПЭВМ обменивается данными с программируемым логическим
контроллером посредством интерфейса Ethernet, который совместно с протоколом
передачи обеспечивает гарантию достижения получателя пакетами информации.
5.
5. Технического задание на создание автоматизированной системы
управления
.1 Основание для проектирования
Проект автоматизации системы водоснабжения разрабатывается в соответствии
с заданием на выпускную квалификационную работу специальности 220201 -
Управление и информатика в технических системах.
5.2 Назначение и цели создания системы
В данной квалификационной работе разрабатывается система автоматизации
водозабором. Целью создания автоматизированной системы управления водозабором
является повышение эффективности технологического процесса, снижение издержек и
максимальное исключение человеческого фактора.
5.3 Краткие сведения об объекте автоматизации
Объектом автоматизации является существующая система водоснабжения,
состоящая из двух групп скважин, территориально удаленных друг от друга
примерно на расстоянии до 1 км, резервуара, канала потребления и насосов 1-ого
и 2-ого подъемов.
В насосных 1-ого подъема происходит забор воды из скважин с помощью
погружных насосов. Вода из всех скважин попадает в общий резервуар, откуда
забирается насосами 2-ого подъема и подается потребителю в общий водопровод.
5.4 Перечень задач автоматизации и требования к
техническим характеристикам системы
Автоматизация управления должна обеспечивать оптимальный режим работы
системы водозабора, предостеречь установку от аварий, способствовать повышению
производительности труда и сокращению эксплуатационных расходов.
Проект должен предусматривать следующие функции автоматизации:
автоматику безопасности;
экстренную остановку при отклонении текущих технологических
параметров в зону аварийного значения;
аварийную сигнализацию, оповещающую об отклонениях текущих
технологических параметров в зону аварийного значения;
предупредительную сигнализацию, оповещающую об отклонениях
текущих технологических параметров от нормального регламентированного значения,
но еще не достигшего значения, при котором возможно аварийной сигнализации.
чередование использования технических средств для продления их
срока службы;
дистанционную передачу данных между составляющими системы и их
учет при регулировании.
Регулирование следующих параметров:
уровень воды в резервуаре.
Комплекс технических средств должен обеспечивать:
сбор данных о состоянии технологических параметров на всех
объектах системы;
регистрацию данных и использование этих данных для
прогнозирования нагрузки;
мониторинг текущего состояния АСУ в режиме реального времени.
5.5 Требования к системе
Система должна быть спроектирована с применением отечественных и
зарубежных средств автоматизации. В системе должны применяться контроллеры,
прошедшие процедуру сертификации Госстандарта РФ.
АСУ должна удовлетворять требованиям:
высокой эксплуатационной надежностью и безопасностью работы
оборудования;
удобством работы оперативного персонала в процессе контроля и
управления;
наличием аппаратных и программных средств для организации
информационного обмена с системой управления верхнего уровня;
дистанционное управление технологическим оборудованием;
автоматическая аварийная остановка по команде оператора.
Разрабатываемая АСУТП должна соответствовать ГОСТ 24.104 ЕСС АСУ
"Автоматизированные системы управления. Общие требования" с учетом
требований, изложенных в данном разделе.
Создаваемая Система должна иметь иерархическую структуру, включающую в
себя два уровня:
средний уровень - функционально-распределенная микропроцессорная
система управления (микропроцессорные программируемые контроллеры и устройства
сопряжения с объектом), обеспечивающая выполнение функций сбора, первичной
обработки входных сигналов, автоматического управления, регулирования,
последовательного управления, технологических защит и блокировок;
верхний уровень - уровень, обеспечивающий реализацию функций
отображения информации, дистанционного управления технологическим процессом,
дистанционной настройки системы, протоколирования, архивирования, приема и
передачиинформации в систему управления производством.
Средний уровень Системы должен строиться по агрегатно-блочному принципу и
состоять из отдельных (локальных) подсистем.
Верхний уровень включает автоматизированное рабочее место (АРМ) оператора
(1 шт).
АСУ ТП должна быть открытой, т.е. должна поддерживать стандартные
технологии, такие как платформы ПК с операционными системами Windows,
Ethernet-коммуникации, TCP/IP, OPC для совместной работы со множеством систем
различных поставщиков, системы управления с возможностью установки их в полевых
условиях, удаленные подсистемы входов/выходов.
Режим функционирования системы должен соответствовать режиму работы
основного технологического оборудования, то есть система должна
функционировать:
·
круглосуточно;
·
автоматически;
·
бесперебойно.
Работа распределенной системы управления не должна влиять на работу
системы противоаварийной защиты - как в нормальном режиме работы, так и в
случае нарушения своей работоспособности.
Должна быть обеспечена надежная защита АСУТП:
от несанкционированного доступа;
от разрушения или останова работы программного обеспечения в
результате некорректных действий оператора технологического процесса;
от проникновения в Систему вирусов.
Должна быть обеспечена возможность полного исключения на использование
станции оператора в качестве персонального компьютера для непроизводственных
целей, выходящих за рамки инструкций технолога-оператора.
Система должна предусматривать возможность простого наращивания
количества промышленных контроллеров, каналов ввода/вывода информации, АРМ.
Общие эргономические требования, регламентирующие организацию рабочего места,
взаимное расположение средств связи в пределах рабочего места должны
соответствовать СанПиН 2.2.2/2.4.1340-03.
Система должна обеспечивать высокое качество взаимодействия человека с
машиной, комфортность условий работы персонала и иметь:
интуитивно-понятный графический интерфейс;
модульный принцип построения, допускающий изолированное
использование отдельных компонент Системы, а также их комбинаций, диктуемое
производственно-экономическими задачами;
получение удобно-читаемой информации в объеме, достаточном для
контроля выполнения договорных обязательств по энергопотреблению.
Размеры экрана должны быть не менее 21 дюйма по диагонали. Фрагменты
изображения не должны быть перенасыщены информацией и разнообразием цветовой
гаммы.
Предупредительная и предаварийная сигнализация должна сопровождаться
мерцанием и изменением цвета цифровых значений переменных на экране дисплея, а
также звуковой сигнализацией, квитируемой технологическим персоналом.
Уровни освещённости рабочих мест персонала должны соответствовать
характеру и условиям труда. Должна быть предусмотрена защита от слепящего
действия света и отражения (бликов).
Компоновка технических средств Системы должна быть рациональной, как с
точки зрения монтажных связей между ними, так и удобства их эксплуатации и
обслуживания.
5.6 Требования по безопасности
При монтаже и техническом обслуживании системы автоматизации должны
выполняться общие правила работы, установленные для электрических установок
документами:
Правила устройства электроустановок (ПУЭ), издание 7 - 2000г.;
Правила технической эксплуатации электроустановок потребителей и
правила техники безопасности при эксплуатации электроустановок потребителей
(ПТЭ и ПТБ), издание 3 -1986;
СНиП 3.05.07-85 Системы автоматизации.
Требования безопасности к составным частям системы автоматизации в
отношении изоляции токоведущих частей, блокировок и защитному заземлению должны
соответствовать ГОСТ 12.2.007.0, ГОСТ 25861.
По способу защиты человека от поражения электрическим током система
автоматизации должна относиться к классу 01 по ГОСТ 12.2.007.0.
Требования безопасности, предъявляемые к комплектным устройствам,
монтируемым в шкафах системы автоматизации, должны соответствовать ГОСТ
12.2.007.0.
Уровень шумов не должен превышать допустимых значений по ГОСТ 12.1.003.
Все внешние части устройств, находящиеся под напряжением по отношению к
корпусу и (или) общей шине питания, должны иметь защиту от случайных
прикосновений персонала при контроле и эксплуатации. Рукоятки органов
управления, настройки и регулировки в цепях с напряжением свыше 42 В должны
быть изготовлены из изоляционного материала или иметь изоляционное покрытие.
Конструкция устройств должна исключать возможность попадания в процессе
эксплуатации электрических напряжений на наружные металлические части, в том
числе на металлические ручки, рукоятки органов управления, замки, фиксаторы и
т.п. Металлические части изделий, доступные для прикосновения к ним при
контроле и эксплуатации (включая регламентные работы), которые могут оказаться
под напряжением в результате повреждения изоляции и не имеют других видов
защиты, подлежат защитному заземлению по ГОСТ 12.1.030.
Корпуса блоков, входящих в состав аппаратуры, предназначенные для
установки в шкаф пользователя, должны иметь устройства для подключения защитного
заземления по ГОСТ 12.2.007.0. На корпусе около устройства защитного заземления
должен быть нанесен знак заземления по ГОСТ 2.721.
Защитные приспособления цепей с рабочим напряжением, превышающим 42 В,
должны иметь надписи или знаки, предупреждающие обслуживающий персонал об
опасности. Предупреждающие надписи и знаки должны быть четкими, нестираемыми и
соответствовать ГОСТ 12.4.026, ГОСТ 12.4.040.
Устройства, подключаемые к питающей цепи или источникам питания с
напряжением выше 42 В, должны иметь сигнализацию, фиксирующую подачу питающего
напряжения. Устройства должны быть снабжены указателями положения переключателя
напряжения. Выключатель сети питания должен соответствовать напряжению питающей
сети, коммутируемой мощности и обеспечивать двухполюсную коммуникацию.
Переключатели и другие органы управления, состояние которых может
повлиять на безопасность работы персонала, должны иметь маркировку,
обозначающую выполняемые ими функции.
В эксплуатационную документацию на оборудование с рабочим напряжением,
превышающим 42 В, должны быть включены требования безопасности при контроле,
эксплуатации (включая техническое обслуживание) и ремонте изделий.
Устройства и их составные части массой более 20 кг должны иметь
устройства для подъема, опускания и удержания на весу при монтажных и
такелажных работах, если контуры изделия не позволяют удобно и надежно
захватить их тросом подъемного устройства.
Все устройства должны присоединяться к общему контуру заземления с
сопротивлением растекания не более 4 Ом.
Используемые для монтажа системы автоматизации кабели, входящие в состав
поставки, должны соответствовать требованиям ПУЭ по сечениям и конструктивному
исполнению.
5.7 Требования к подготовленности персонала АСУ
Персонал автоматизированной системы в соответствии с ролью, выполняемой
им в процессе функционирования Системы, делится на 2 основные категории:
оперативный (технологический) персонал;
эксплуатационный (обслуживающий) персонал.
К оперативному персоналу относятся лица, непосредственно участвующие в
принятии решений по управлению технологическим процессом и в выполнении функций
защиты. В данном случае - это аппаратчики, начальники смен и технологических
установок, технологи и начальники цехов.
Внедрение Системы не повлияет на численность технологического персонала,
однако потребует от него специальной подготовки.
К эксплуатационному (обслуживающему) персоналу относятся лица,
обеспечивающие нормальные условия функционирования Системы в соответствии с
Инструкциями по эксплуатации и обслуживанию, и выполняющие работы по
техническому обслуживанию Системы.
Перед вводом Системы в эксплуатацию технологический и эксплуатационный
персонал должен пройти соответствующее обучение.
Помимо персонала АСУТП, работу Системы обеспечивает также ремонтный
персонал, непосредственно в функционировании Системы не участвующий, однако
способный выполнить ремонт отказавших технических средств.
Штатная численность ремонтного и эксплуатационного персонала АСУ ТП
устанавливается руководством предприятия, исходя из количества, надежности и общей
трудоемкости, эксплуатации обслуживаемых комплексов технических средств,
конкретных систем с учетом трудозатрат на ремонт датчиков, исполнительных
механизмов и комплекса технических средств верхнего уровня.
Количественный состав сменного персонала устанавливается руководством
предприятия, исходя из объема, сложности эксплуатируемых систем, сменности
работы технологического оборудования и возможности выделения компактных зон
обслуживания. Персонал АСУ должен быть подготовлен к выполнению своих обязанностей
в соответствии с инструкциями организационного обеспечения.
Каждое лицо, входящее в состав персонала АСУ, должно применять
соответствующие информационные модели и работать с используемыми им
техническими средствами и документацией, определяющей порядок его деятельности.
6. Исследование автоматизированной системы управления
.1 Общие сведения
АСУ ТП представляют собой высший этап автоматизации водопроводных
сооружений и призваны обеспечивать оптимальное ведение технологических
процессов водоснабжения.
В технологическом процессе водоснабжения можно выделить два подпроцесса -
подъем и обработку воды, подачу и распределение воды. В соответствии с этим под
АСУ ТП водоснабжения следует понимать комплекс систем, состоящий из:
АСУ ТП подъема и обработки воды (АСУ ТП ПОВ), осуществляющей управление
насосными станциями I подъема и водоочистными сооружениями (фильтровальными
станциями, отстойниками, дозированием химических реагентов и др.);
АСУ ТП подачи и распределения воды (АСУ ТП ПРВ), охватывающей резервуары
чистой воды, насосные станции II и последующих подъемов, водопроводные сети.
АСУ ТП ПРВ создаются на водопроводах с поверхностными и подземными
водоисточниками, АСУ ТП ПОВ ¾ на крупных водоочистных станциях с поверхностными
водоисточниками.
Целью управления при функционировании АСУ ТП водоснабжения является
обеспечение надежного водоснабжения населения и промышленности города с
минимальными эксплуатационными затратами.
Переменная часть эксплуатационных затрат, зависящая от режима работы
сооружений, включает расход электроэнергии на насосных станциях, утечки и
нерациональные расходы воды, расход химических реагентов.
Известно, что в городских водопроводах имеется значительный перерасход
электроэнергии (до 10-15 %), обусловленный избыточными напорами воды, нерациональным
распределением нагрузки между насосными станциями, а также работой насосных
агрегатов при пониженных значениях КПД.
Водопотребление в жилых зданиях существенно зависит от напоров воды.
Поскольку в централизованных системах подачи и распределения воды напор
водоисточника (насосной станции или резервуара) выбирается из условия
обеспечения требуемых давлений в конечной или наиболее высоко расположенной
точке сети (диктующей точке), в большинстве районов сети имеются избыточные
напоры. Часть избыточных напоров является неизбежной, так как зависит от
конструкции сети, и необходима для подачи воды в более удаленные точки сети,
другая часть зависит от режима работы системы. Избыточные напоры в сети
вызывают повышенный расход воды.
При оптимизации режимов работы водопроводов необходимо минимизировать не
только потребление электроэнергии и потери воды, по также и недоотпуск воды
вследствие недостаточных напоров в диктующих точках сети.
Поэтому в качестве критерия оптимальности I следует рассматривать составную
функцию
= I1 +I2 +I3,
гдеI1¾ потери
воды и перерасход электроэнергии, вызванные избыточными напорами в сети,- штраф
за недоотпуск воды потребителям при недостаточных напорах в ряде точек сети;¾ затраты на управление (повышенный
расход электроэнергии при переключениях насосов, потери энергии при
дросселировании напора задвижками и др.).
На водоочистных станциях отмечается перерасход химических реагентов (на
20-30 %).
При внедрении АСУ ТП с помощью ЭВМ, телемеханической и другой аппаратуры
осуществляются сбор информации о напорах в диктующих точках водопроводной сети
и параметрах работы насосных станций (подаче, напоре, расходе электроэнергии,
значениях уровня воды в резервуарах) и контроль за расходованием реагентов и
работой фильтров, производится анализ этой информации и выполняются расчеты по
определению оптимальных условий эксплуатации.
АСУ ТП водоснабжения представляет собой систему, в которой человек
(диспетчер) с помощью различных технических средств осуществляет управление,
используя рекомендации по оптимальному ведению технологического процесса
водоснабжения, а ЭВМ производит первичную обработку информации, необходимые
расчеты и выполняет функции „советчика" диспетчера.
Участие человека в управлении необходимо из-за сложности систем
водоснабжения, наличия ряда неформализованных факторов, влияющих на принятие
решений, а также из-за отсутствия ряда автоматических регуляторов и других
устройств, необходимых для комплексной автоматизации сооружений. Включение
человека в контур управления требует использования специальных технических
средств отображения информации и ввода команд управления (мнемощитов, дисплеев,
диспетчерских пультов и др.).
Таким образом, АСУ ТП водоснабжения является системой
информационно-советующего типа. Для отдельных локальных технологических
процессов рекомендуется осуществлять автоматическое управление без участия
человека (управление группой насосов, работающих на резервуар, управление
артезианскими скважинами, дозирование химических реагентов, управление
(фильтрами и др.). В таких случаях автоматическое управление осуществляется по
определенной, заранее разработанной программе.
Управление процессами подъема, очистки, подачи и распределения воды
производится в условиях функционирования АСУ ТП по принципу «оптимизации
прогноза». Это означает, что ЭВМ производит расчет прогнозируемого оптимального
режима работы сооружений на предстоящий период (обычно на 24 ч), а затем
операционно контролирует напоры в сети, корректируя при необходимости расчетный
режим. Таким образом может осуществляться управление в нормальных условиях
эксплуатации.
Однако на водопроводах нередки аварийные ситуации, связанные с разрывом
труб или выходом из строя насосных агрегатов, необходимостью подачи больших
количеств воды при тушении пожаров и т.п. В таких случаях диспетчер должен с
помощью ЭВМ выбрать наиболее эффективный вариант действия по локализации
аварий, т.е. определить, какие задвижки должны быть переключены и какие напоры
должны развивать насосные станции для обеспечения водой в создавшихся условиях наибольшего
числа потребителей.
АСУ ТП водоснабжения включает в свой состав устройства локальной
автоматики, системы централизованного сбора информации о технологических
параметрах и состоянии оборудования, средства вычислительной техники и
аппаратуру диспетчеризации. Поэтому АСУ ТП можно рассматривать как дальнейший
этап развития автоматизации водоснабжения.
Основной характерной чертой АСУ ТП водоснабжения, отличающей ее от
системы диспетчерского управления, является использование вычислительной
техники для расчетов оптимальных режимов работы водопроводных сооружений.
6.2 Алгоритм сбора и обработки информации
Для АСУ ТП ПОВ и АСУ ТП ПРВ сбор и обработка информации предусматриваются
следующим образом:
измерение, контроль и учет текущих значений параметров ¾ путем циклического опроса датчиков с
последующей фильтрацией полученных показаний (для устранения резких случайных
выбросов), сравнением сигнала, полученного после фильтрации, с границами
допуска и выдачей сигнала диспетчеру в случае выхода показаний за допустимые
пределы;
измерение, контроль и учет интегральных значений параметров ¾ путем запоминания количества
импульсов с выходов счетчиков и накопления их в интегрирующих устройствах
телемеханики;
решение задач контроля и учета параметров, полученных с помощью
телесигнализации, ¾ методом логического анализа.
В задачах оперативного учета и расчета технико-экономических показателей
используется метод прямого счета.
Критерием при решении задач оптимизации работы станций I подъема и
очистных сооружений является технологическая себестоимость воды, поданной
потребителям.
Задача расчета графика работы насосной станции I подъема, работающей на
резервуар, решается методами нелинейного программирования. Для упрощения
решения ее можно свести к задаче, решаемой методом прямого счета при выполнении
следующих условий: на участке нарастания водопотребления в момент равенства
подачи и потребления воды объем ее в резервуаре должен быть максимальным; на
участке спада водопотребления в момент равенства подачи и потребления воды
объем воды в резервуаре должен быть минимальным. Исходя из этих условий
определяются моменты включения дополнительных насосных агрегатов.
Задача распределения воды по технологическим линиям заключается в
определении подачи воды каждой линией так, чтобы минимизировать общую
технологическую себестоимость обработки воды на станции при заданной общей
подаче воды станцией и заданных технологических ограничениях на пропускную
способность линии. Эта задача решается методом проекции градиента. Исходные
данные получаются из решений задачи расчета оптимальных доз реагентов при
различных величинах подачи воды.
Расчет оптимальных доз реагентов заключается в нахождении доз реагентов,
обеспечивающих минимальное значение технологической себестоимости обработки
воды при условиях, которые определяют связь между входами технологических
звеньев, и учете технологических ограничений на производительность сооружений и
качество обработанной воды. Задача решается методом линейного программирования.
Для корректировки модели применен релаксационный алгоритм идентификации
(алгоритм Качмажа).
Расчет оптимального режима работы фильтров заключается в определении
подачи воды каждым фильтром так, чтобы суммарный расход воды на нужды станции
за заданное время был минимальным при заданных технологических ограничениях и
общей подаче воды станцией. Задача решается методом проекции градиента. Расчет
производится по математическим моделям фильтров. Коэффициенты моделей
корректируются с помощью алгоритма Качмажа.
Рисунок 6.1 - Общий алгоритм функционирования АСУ ТП
Решение задачи прогнозирования суточного графика вoдoпoтpeблeний в
различных проектах ЛСУ ТП может осуществляться несколькими методами:
построением моделей авторегрессии или проинтегрированного скользящего среднего,
методом „предельных циклов" и др.
Для расчета оптимальных режимов работы насосных станций используются
математические модели, связывающие напор и подачу насосных станций и давления в
диктующих точках сети. Такие модули имеют вид полиномов, коэффициенты которых
определяют на основе статистической обработки данных о параметрах работы
системы за прошедшие две-три педели.
Для расчета оптимальных режимов работы систем с несколькими насосными
станциями могут быть использованы методы линейного программирования.
Задача оптимального управления группами артезианских скважин (колодцев)
предусматривает расчет для каждого часа суток необходимого числа работающих
артезианских скважин с учетом их экономичности, длительности работы и уровня
воды в скважинах. При увеличении водопотребления предусматривается включение
наиболее экономичных скважин, а при уменьшении - отключение наименее
экономичных. Задача решается методом логического анализа.
Взаимосвязь задач АСУ ТП, последовательность, периодичность и обусловленность
их решения определяются общим алгоритмом функционирования, который отражает
принятую стратегию оперативного управления.
Задачи централизованного контроля должны решаться
круглосуточно-непрерывно. Учетные задачи, как правило, решаются ежечасно, тогда
как расчет технико-экономических показателей должен проводиться один раз в
смену или один раз в сутки.
Оперативное планирование режимов производится один раз в сутки, а также
при резком изменении водопотребления или условий работы водопровода. Задачи
коррекции режимов решаются по мере возникновения необходимости изменения
расчетного плана работы сооружений.
Управление сооружениями производится в соответствии с расчетным
оперативным планом-графиком оптимального режима или в результате решения задач коррекции
режима.
На блок-схеме общего алгоритма функционирования АСУ ТП водоснабжения
показана взаимосвязь задач.
6.3 Алгоритм управления скважинами
Управление подземными водоисточниками (артезианскими скважинами, шахтными
колодцами, лучевыми водозаборами и др.) имеет ряд особенностей и должно
учитывать следующие факторы:
эксплуатационные особенности скважин (колодцев);
гидравлические условия скважин (колодцев) и аспекты совместной работы
группы скважин (колодцев);
экономические показатели скважин (колодцев).
Эксплуатационные особенности накладывают ряд ограничений на работу
скважин (колодцев). Необходимо избегать частых „рывков", т.е. включений и
выключений скважин, так как это может привести к ссыпке песка (пескованию
скважин). Во многих случаях пуск скважин связан с необходимостью
кратковременного выпуска воды с примесью песка. Скважины необходимо
периодически останавливать для профилактического осмотра или ремонта насоса.
Во избежание перегрузок сборного водовода и энергетических линий
необходимо осуществлять пуск нескольких скважин постепенно через определенные
временные интервалы (например, через 10 мин). Скважины, работающие на
специальных потребителей, отключать нельзя. В шахтных колодцах, имеющих два
насоса, целесообразно, чтобы один насос постоянно находился в работе, а второй
включался и отключался по мере необходимости.
Необходимо обеспечить контроль уровня воды в скважинах и не допускать его
снижения ниже предельно допустимого значения.
Алгоритмы управления артезианскими скважинами предусматривают разделение
их на три группы:
первая (группа А) - скважины, работающие в настоящий момент;
вторая (группа В) ¾ скважины, находящиеся в резерве;
третья (группа С) ¾ скважины, находящиеся в простое (готовые кработе).
Массивы номеров скважин упорядочиваются в памяти ЭВМ по величине
удельного расхода электроэнергии. При необходимости уменьшения подачи воды от
водозабора необходимо исключить из массива А скважину, имеющую наибольший
удельный расход электроэнергии. Номер этой скважины следует перенести из массива
А в массив С. Обратные действия следует производить при необходимости
увеличения подачи воды. Одновременно необходимо контролировать
продолжительность работы каждой скважины с целью своевременного проведения
профилактического осмотра или ремонта. При этом номер выведенной из работы
скважины следует перевести из массива А в массив В.
6.4 Методы расчета оптимальных режимов работы
Структура системы подачи и распределения воды зависит от планировки
города, месторасположения водоисточников, рельефа местности и других факторов.
Несмотря на разнообразие схем водопроводных сетей городов, можно выделить ряд
типовых элементов, из которых складывается структура большинства систем подачи
и распределения воды:
а) насосная станция питает изолированную зону;
б) несколько насосных станций питают общую зону;
в) насосная станция подает воду в сеть и резервуар;
г) насосная станция питает сеть и несколько резервуаров;
д) насосная станция питает сеть, резервуар и насосную станцию следующей
зоны.
Алгоритм расчета оптимального режима работы каждой конкретной системы
подачи и распределения воды имеет индивидуальный характер и строится на
сочетании алгоритмов управления типовыми элементами, входящими в состав данного
водопровода.
Наиболее сложными и важными являются задачи оперативного планирования
оптимальных режимов. Трудность таких расчетов связана с необходимостью
построения математических моделей системы подачи и распределения воды и
прогнозирования колебаний водопотребления на предстоящий период.
Анализ задач оперативного управления показал, что для расчета оптимальных
режимов работы насосных станций в большинстве случаев нецелесообразно
производить гидравлический расчет водопроводных сетей и использовать принятые
при проектировании традиционные модели потокораспределения - расчетные схемы
сетей. Это объясняется трудностью получения данных о фактических и требуемых
значениях узловых расходов для каждого часа предстоящих суток, а также
чрезмерно большими для оперативного управления затратами машинного времени на
проведение расчетов даже при использовании мощных современных ЭВМ.
Гидравлический расчет следует производить при анализе нагруженности
различных магистралей водопроводной сети, при поиске наивыгоднейших вариантов
развития сетей, перераспределения водопотоков при использовании управляемых
задвижек или поворотных затворов на магистралях, а также при анализе аварийных
ситуаций на сети и поиске вариантов локализации аварий или минимизации
недоотпуска воды при отключении аварийных участков и др.
Для выбора оптимальных режимов работы насосных станций требуются только
данные о напорах на насосных станциях и в диктующих точках сети. В то же время
основная часть информации, получаемой при гидравлическом расчете (о потерях
напора и расходах по участкам), при этом не используется и является избыточной.
В связи с этим для расчета оптимальных режимов работы насосных станций
рекомендуется использовать обобщенные математические модели, выражающие
взаимосвязь напора Нн.ст и подачи Qн.ст воды насосной станции с давлением в
диктующей точке сети Ндт:
Нн.ст = Нд.т + а + b Qн.ст + с Q2н.ст,
где а, b, с ¾ коэффициенты, полученные в результате статистической обработки данных о
параметрах работы насосных станций и водопроводной сети.
В ряде случаев характеристика сети достаточно хорошо описывается простой
линейной моделью:
Нн.ст = Нд.т + а + b Qн.ст.
Использование математических моделей указанного вида существенно
облегчает расчет оптимальных режимов насосных станций при достаточной для
практических целей точности решения. В целях повышения точности целесообразно
производить периодическое уточнение моделей, т.е. программа расчета должна
включать блок идентификации параметров .модели.
Важной особенностью оперативного планирования является необходимость
учета колебаний водопотребления в течение предстоящих суток. Водопотребление
носит случайный характер, поэтому при планировании режимов необходимо
осуществлять расчет по прогнозированию этого процесса на основе данных о подаче
воды насосными станциями за прошедший период.
Оперативное планирование режимов работы насосной станции рекомендуются
осуществлять путем декомпозиции этой задачи на ряд последовательно решаемых
подзадач. При этом планируемый период разделяется на отрезки времени, в течение
которых водопотребление принимается неизвестным и непрерывный график
водопотребления заменяется дискретным (например, почасовым).
Оперативное планирование производится в такой последовательности:
расчет прогнозированного почасового графика водопотребления на
предстоящие сутки;
расчет оптимальных параметров работы насосных станций (подачи,
напора) для каждого часа предстоящих суток;
выбор оптимального состава работающих насосов для каждого часа
суток.
В настоящее время разработаны алгоритмы и программы решения задач
прогнозирования, выбора оптимального состава насосов, а также расчета
оптимальных параметров работы насосных станций для ряда характерных структур
систем подачи и распределения воды, сетей с одной или несколькими насосными
станциями, сетей с насосными станциями и резервуарами, сетей с резервуарами и
др.
В некоторых алгоритмах предусматривается одновременное решение задач
расчета оптимальных параметров работы насосных станций и выбора оптимального
состава работающих насосов.
7.
7. Разработка проектной документации на автоматизированную систему
управления
.1 Описание схемы автоматизации
В данной работе рассматривается система водоснабжения, которая включает в
себя три удаленных друг от друга помещения. Два помещения представляют из себя
насосные первого подъема, в которых размещаются дренажные насосы. В каждом из
таких помещений находится по три дренажных насоса, которые приводятся в работу
с помощью устройств плавного пуска Siemens Sirius 3RW40. Устройство плавного
пуска позволяют предотвратить броски тока и снизить нагрузку на трубопровод,
тем самым продлевая срок службы насосов и уменьшая вероятность возникновения
прорыва водопровода.
Каждая скважина оснащена модулями аналогового ввода ОВЕН МВА8 и модулями
цифрового ввода-вывода ОВЕН МДВВ. Данные модули объединены в сеть с
контроллером ОВЕН ПЛК150 с помощью интерфейса RS-485, который позволяет
обмениваться данными на расстояниях до 1 километра. Управление данными блоками
ввода-вывода полностью возлагается на программируемый логический контроллер.
Для контроля уровня воды каждая скважина оснащается кондуктометрическим
датчиком уровня, который сигнализирует о низком уровне воды в скважине. Данный
сигнал поступает на модуль ввода МВА8, что делает его доступным для
контроллера, который исходя из этого сигнала подает предупреждающие сигналы
оператору и останавливает соответствующий дренажный насос для предотвращения
сухого хода. Так же на водопроводе каждой скважины установлен датчик давления,
который позволяет определить наличие воды и давление, создаваемое ею в
водопроводе, что является необходимой информацией с точки зрения
автоматического управления. На выходе из каждой скважины в начале трубопровода
установлен обратный клапан, который делает невозможным движение воды в обратном
направлении.
Вода, забираемая дренажными насосами из скважины поступает в общий
резервуар. Данный резервуар оборудован тремя кондуктометрическими датчиками
уровня, которые позволяют судить об уровне воды в резервуаре и предотвратить
его опустошение или переполнение.
Задача подачи воды непосредственно потребителям возлагается на сетевые
насосы, которые находятся в том же здании, где находится диспетчерский пункт.
Сетевые насосы работают с резервированием, что позволяет повысить коэффициент
надежности. Каждый сетевой насос работает через частотный преобразователь. Все
частотные преобразователи подключены к контроллеру и управляются им. Это
позволяет реализовать оптимальные алгоритмы управления, которые могут продлить
ресурс оборудования и понизить вероятность его выхода из строя.
В конце общего трубопровода установлены датчик давления и расходомер.
Давление в трубопроводе потребителя является основной регулируемой величиной.
Поддержание оптимального давления позволяет снизить расход воды и
электричества, что положительно влияет на экономические показатели. Расходомер
позволяет вести учет воды, что является необходимым в данной системе.
7.2 Описание схемы регулирования
Схема регулирования описывает способы подключения всех устройств и
соединения их воедино. На разработанной схеме представлены все технические
средства, используемые для автоматизации данного технологического процесса. Так
как некоторые компоненты системы удалены друг от друга на расстояния больше 100
метров, встает проблема соединения всех устройств воедино. Для достижения
поставленной цели используется интерфейс RS-485, который позволяет соединить
программируемый логический контроллер и модули ввода и вывода воедино. Это дает
возможность работать с данными удаленных датчиков так же, как и с локальными.
Для соединения устройств используется топология «шина». Контроллер является
ведущим устройством, а остальные компоненты системы, такие как модули ввода и
вывода - ведомыми.
На схеме регулирования можно увидеть линии подведения питания. Здесь
используется трехфазное напряжение для подключения устройств плавного пуска и
частотных преобразователей, которое, соответственно, подают его на дренажные и
сетевые насосы.
Устройства плавного пуска управляются дискретным сигналом, вырабатываемым
модулем ввода-вывода. Информация о состоянии устройства плавного пуска так же
поступает на вход данного модуля. Информация такого рода выводится на дисплей
оператора, тем самым обеспечивая наглядный контроль за исправностью системы.
Частотные преобразователи работают с сетевыми насосами по такой же схеме.
Датчики давления и уровня подключаются к модулю ввода МВА8 и передают данные по
сети RS-485 главному контроллеру.
7.3 Описание схемы сигнализации
Каждая автоматизированная система управления должна предусматривать
световую и звуковую сигнализации, которые позволяют своевременно извещать оператора
о внештатных ситуациях, так как уровень ущерба сильно зависит от, насколько
быстро будут приняты соответствующие меры по устранению проблемы.
Система сигнализации в данной системе водоснабжения представляет собой
ряд световых и звуковых сигналов, подаваемых при возникновении внештатной
ситуации. К там ситуациям относятся:
низкий уровень воды в скважине;
низкий уровень воды в резервуаре;
высокий уровень воды в резервуаре;
низкое давление в трубопроводе потребителя;
высокое давление в трубопроводе потребителя;
отсутствие потока воды на входе в водобак;
При возникновении одной из перечисленных ситуаций загорается
соответствующая сигнальная лампа на щите автоматики. При возникновении
критических ситуаций, к которым относятся отсутствие потока воды в водопроводе
подается звуковой сигнал. Так же в системе есть две сигнальных лампы, которые
сигнализируют о наличии одной из проблем и являются дублирующими.
Программируемый логический контроллер позволяет сильно упростить
реализацию системы сигнализации. На вход контроллера поступают сигналы с
датчиков системы и, на основании этих данных, контроллер вырабатывает
управляющие сигналы для включения соответствующих световых и звуковых
индикаторов.
7.4 Описание схемы питания
Рассматриваемая система водоснабжения использует трехфазное питание с
напряжением сети 380 вольт. Необходимость использования трехфазного питания
обусловлена использованием мощных дренажных и сетевых насосов. Разработанная
схема питания описывает подключение технических средств к электросети.
В данной схеме питания используются автоматические выключатели разных
номиналов, которые позволяют защитить оборудования от короткого замыкания. Так
же здесь используются предохранители в качестве дополнительной меры защиты.
Для устройств, которые работают от напряжения 24 В используются
специальные блоки питания.
На щите автоматике присутствует отдельная сигнальная лампа, которая
показывает наличие напряжения в сети.
7.5 Описания схемы подключения внешних проводок
Схемы подключения внешних проводок показывают способ соединения
технических средств. В данной автоматизированной системе управления
используются двухконтактные датчики уровня и давления. Для их подключения
используется двухжильный кабель, выбранный в соответствии с типом производства
и категорией помещений. Каждый датчик находится на разном расстоянии от модуля
ввода. Данные о длине кабеля отражены на разработанной схеме. Всего на схеме
присутствует 8 удаленных друг от друга точек крепления датчиков - шесть мест
установки дренажных насосов, водобак и выход в водопровод потребителя.
7.6 Описание схемы щита
Схема щита описывает расположение оборудования в главном щите автоматике.
Данный щит находится в одном здании вместе с сетевыми насосами второго подъема
и помещением диспетчерской.
В качестве щита используется продукция российской фирмы Проминэкс, а
именно модель ЩРН-36. Данная модель имеет следующие габариты: ширина 520 мм,
высота 310 мм, глубина 120 мм. Данный щит вмещает в себя следующие технические
средства:
выключатель положения дверей;
лампа освещения;
программируемый логический контроллер ОВЕН ПЛК150;
модуль аналогового ввода ОВЕН МВА8;
модуль дискретного вывода ОВЕН МК110;
модуль дискретного ввода-вывода ОВЕН МДВВ;
автоматические выключатели ABB серии S800;
лампы сигнальные.
Автоматические выключатели позволяют отключить как все питание, так и
каждого отдельного прибора в частности.
Сигнальные лампы выполняют функции индикации внештатных ситуаций, а так
же наличия питания в сети.
7.7 Описание структурной схемы
Структурная схема системы водоснабжения описывает расположение
оборудования в помещениях. Всего на территории находится три помещения
категории Д. Данные помещения находятся на расстояниях от 200 до 400 метров
друг от друга.
Два здания представляют собой насосные станции первого подъема. В каждой
из таких станций располагается группа из трех дренажных насосов, которые
производят забор воды из скважин. В каждом из этих помещений находится шкаф
управления насосами, который содержит в себе модули аналогового ввода и
дискретного ввода-вывода. Так же в помещениях находятся устройства плавного
пуска, которые непосредственно подключаются к дренажным насосам и управляются
управляющими сигналами, поступающими с модулей дискретного вывода. Так же
устройства плавного пуска передают сигналы о своем состоянии на модули ввода,
что позволяет отслеживать исправность работы насосов с единого диспетчерского
пункта.
Третье здание представляет собой одновременно насосную второго подъема и
диспетчерский пункт. В данном помещении находится основной шкаф управления,
который включает в себя главный контроллер, а так же модули ввода-вывода. Так
же здесь находятся сетевые насосы, которые приводятся в действие частотными
преобразователями, которые в свою очередь получают управляющие сигналы от
главного контроллера. Два насоса являются резервными и включаются в работу
только при выходе основных насосов из строя.
Помещение операторской представляет собой комнату, в которой находится
место оператора. Оно оборудовано ПЭМВ, на котором установлено программное обеспечение
CoDeSys HMI. Данное программное обеспечение представляет собой SCADA систему и
позволяет следить за состояние всем системы водоснабжения из одного места. Так
же данное ПО позволяет осуществлять воздействия на систему управления. Связь
между ПЭВМ и ПЛК осуществляется посредством Ethernet-интерфейса.
8. Проектная оценка надежности системы
Система сигнализации является одно из самых важных частей системы.
Основным назначением системы сигнализации является своевременно оповещение о
внештатных ситуациях. В свою очередь, своевременное принятие мер по устранению
этих внештатных ситуаций позволяет избежать какого-либо ущерба. Именно поэтому
надежность системы сигнализации имеет больше значение.
Произведем расчет надежности системы сигнализации, в состав которой
входит следующее оборудование:
Контроллер ОВЕН ПЛК150;
Реле коммутационное;
Лампа сигнальная;
Сирена звуковая;
Диоды выпрямительные.
Для расчета надежности будем использовать граф состояния. Граф состояния
описывают системой обыкновенных дифференциальных уравнений, пользуясь простым
мнемоническим правилом. В левой части каждого уравнения стоит производная по
времени от вероятности нахождения системы в J- том состоянии в момент t. Число
членов в правой части равно числу стрелок, соединяющих рассматриваемое
состояние с другим состояниями. Каждый член равен интенсивности перехода
умноженное на вероятность из какого состояния выходит. Знак «+» - если стрелка
входит в рассматриваемого состояния.
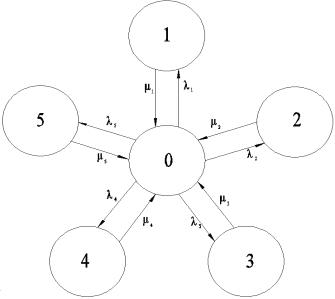
Рисунок 8.1 - Граф состояний системы
Величина λi вычисляется по формуле
λi= ,
,
где mi - время наработки на отказ i-го прибора, ч.
Таблица 8.1 - Расшифровка состояний системы
|
Обозначения состояния
|
Описание состояния
|
|
0
|
Система полностью
работоспособна
|
|
1
|
Вышел из строя диод
|
|
2
|
Вышло из строя реле
|
|
3
|
Вышла из строя лампа
|
|
4
|
Вышел из строя контроллер
|
|
5
|
Вышел из строя гудок
|
Значения интенсивностей отказов и интенсивностей восстановления элементов
системы из таблицы приведем в таблице 7.2.
Таблица 8.2 - Показатели надежности элементов системы
|
Элемент
|
Интенсивность отказов λ, ч -1
|
Интенсивность
восстановления μ,
ч -1
|
|
Диод
|
0,012×10-5
|
0,012×10-4
|
|
Реле
|
0,05×10-5
|
0,06×10-4
|
|
Лампа
|
0,0001×10-5
|
0,002×10-4
|
|
Контроллер
|
0,0003×10-5
|
0,0004×10-5
|
|
Гудок
|
0,06×10-5
|
0,08×10-5
|
В соответствии с графом состояний системы составим математическую модель
надежности, представляющую собой систему обыкновенных дифференциальных
уравнений первого порядка, на основании мнемонического правила:
в левой части каждого уравнения записывают производную по времени от
вероятности нахождения системы в i состоянии в момент времени t№
в правой части число членов равно числу стрелок, соединяющих
рассматриваемое состояние с другими;
каждый член правой части равен произведению интенсивности перехода из
одного состояния в другое на вероятность того состояния, из которого стрелка
выходит;
знак произведения положителен, если стрелка выходит в рассматриваемое
состояние, и отрицателен, если выходит.
систему дифференциальных уравнений дополняют нормировочным условием:

Так как в начальный момент времени подразумевается, что система находится
в полностью работоспособном состоянии, то получим следующие значения начальных
условий
Найдем значения всех вероятностей в конечный момент времени t=44000 ч,
методом Рунге-Кутта с фиксированным шагом:
Сумма всех вероятностей равна

Следовательно, можно сделать вывод о том, что значения всех вероятностей
были вычислены правильно, так как их общая сумма равна 1.
Вероятность безотказной работы системы в целом в течение времени t
определяется по формуле:
 ,
,
где λΣ - сумма интенсивностей отказов всех элементов системы, ч -1 .
 ч -1 .
ч -1 .
Тогда вероятность безотказной работы в целом в течение времени равна t
равна:
 .
.
Исходя из этого, можно сказать, что вероятность безотказной работы
находится на достаточно высоком уровне и удовлетворяет требованиям технического
задания.
9.
Мероприятия по подготовке объекта
автоматизации и персонала к вводу системы в действие
Внедрение АСУ представляет собой процесс постепенного перехода
существующей системы управления к новой и проводится параллельно с работкой
проектной документации, т.е., совмещаются по времени этапы внедрения и рабочего
проектирования отдельных частей (задач, подсистем) АСУ,
Отдельные задачи или подсистемы вместе с соответствующими средствами (при
наличии таковых) внедряются по мере готовности, если это не сказывается на
формальном функционировании других подсистем.
Если задачи или подсистемы взаимосвязаны, в первую очередь внедряются те
из них, выходные параметры, которых являются исходной информацией для решения
других задач или функционирования подсистем.
Монтаж и наладка технических средств и электрокоммуникаций, строительство
помещений, предусмотренных проектом АСУ, производятся силами специализированных
подрядных организаций на основании договора заказчиком или силами заказчика
согласно техническим требованиям, представленным организацией-разработчиком
АСУ.
Цель опытной эксплуатации задачи (или подсистемы) - проверка функционирования
внедряемой задачи в реальных производственных условиях.
Опытная эксплуатация задач или подсистем осуществляется, заказчиком
совместно с разработчиками АСУ, причем срок опытной эксплуатации не должен
превышать трех месяцев.
Заказчик выполняет следующие мероприятия:
выделяет ответственного представителя для курирования работ по
внедрению АСУ;
предоставляет необходимую для разработки АСУ ТП исходную
информацию;
обеспечивает приобретение комплекса технических и программных
средств системы согласно проектным решениям;
обеспечивает возможность доступа представителей исполнителя на
объекты автоматизации;
обеспечивает возможность проведения строительно-монтажных работ
в период, предусмотренный календарным планом-графиком к договору СМР.
обеспечивает работу технических средств на период опытной
эксплуатации, предварительных и приемочных испытаний;
обеспечивает возможность обучения и комплектацию
эксплуатационной службы АСУ;
организует опытную эксплуатацию и приемочные испытания;
участвует в проверке и отработке задач АСУ ТП при опытной
эксплуатации и приемочных испытаниях системы.
Разработчик совместно с заказчиком должен обеспечить выполнение следующих
мероприятий:
наличие действующих лицензий на право проведения работ по
проектированию и разработке АСУТП;
качественное исполнение проектной документации;
проведение обучения технологического персонала и специалистов
подразделения АСУТП объекта автоматизации;
проверку состояния технических средств АСУТП;
проведение комплексной наладки системы;
своевременное проведение предварительных и приёмочных испытаний
Системы;
своевременный ввод системы в промышленную эксплуатацию.
10.
Экономическая эффективность внедрения
автоматизированной системы управления
В данной выпускной квалификационной работе рассматривается
автоматизированная система управления водоснабжением, внедрение которой
планируется произвести с минимальными перебоями в работе. Данная система
управления является дублирующей, то есть часть оборудования, использовавшегося
до модернизации не ликвидируется и продолжает свою работу, что в итоге
позволяет добиться низкой стоимости проекта. В результате внедрения
автоматизированной систему управления должны быть достигнуты поставленные цели,
в том числе:
снижение потребления тока за счет автоматического поддержания
оптимального давления;
исключение бросков тока, перегружающих система электроснабжения
за счет плавного пуска;
снижение средней частоты вращения насосного повышает ресурс
насоса и двигателя в 1,5 раза, а так же исключает резонансные эффекты
конструкции;
уменьшение гидравлической нагрузки на трубопровод и полное
исключение гидроударов, вызывающие частые порывы;
уменьшение расхода воды за счет снижения давления до
оптимального.;
исключение дневных отключений воды за счет того, что глубинные
насосы успевают накачивать воду в кейсон;
дополнительное энергосбережение за счет уменьшения работы
глубинных насосов;
уменьшение степени влияния человеческого фактора.
Расчеты экономической эффективности АСУ служат для:
- обоснования целесообразности внедрения системы в рассматриваемые
сроки;
- выбора технических средств и алгоритмов решения задач на разных
этапах создания системы;
определение основных направлений получения экономии.
В качестве базы для сравнения при расчетах ожидаемого годового экономического
эффекта принимаются показатели на действующих предприятиях.
Таблица 10.1 - Исходные данные для расчета (годовые)
|
Показатели
|
Базовый вариант
|
Проектируемый вариант
|
|
Стоимость основного
технологического оборудования, дол
|
724800
|
952300
|
|
Число смен в сутки
|
3
|
3
|
|
Продолжительность смены,
часов
|
8
|
8
|
|
Количество дренажных
насосов
|
6
|
6
|
|
Длительность работы
оборудования в году, суток
|
340
|
360
|
|
Основной обслуживающий
персонал, чел/смену
|
2
|
1
|
|
Средняя зарплата, рублей
|
10000
|
10000
|
|
Коэффициент надежности
|
0,85
|
0,95
|
|
Объем продукции (вода),
куб.м/год
|
160000
|
170000
|
|
Цена электроэнергии,
руб/кВт×ч
|
4,5
|
4,5
|
|
Расход материальных
ресурсов за год: вода, м.куб./ч электроэнергия, кВт/ч
|
20,5 10
|
19,8 8
|
|
Стоимость материальных
ресурсов за год: электроэнергия, руб/кВт×ч
|
394200
|
315360
|
|
Норма амортизации, %
|
11
|
12
|
|
Норма отчислений на ремонт,
%
|
10
|
8
|
|
Потери, %
|
0,1
|
0,05
|
|
Затраты на текущий ремонт,
руб
|
35160
|
11930
|
|
Коэффициент надежности
|
0,8
|
0,95
Т а б л и ц а 10.2 - Калькуляция затрат на внедрение АС
|
Статьи расходов
|
Порядок расчета
|
Базовый вариант, руб
|
Проектируемый вариант, руб
|
Результат, руб
|
|
1Электроэнергия на
производственные цели
|
W ТэфЦэл ТэфЦэл
|
394200
|
315360
|
78840
|
|
2 Зарплата
производственного персонала
|
nразЗПср12мес
|
720000
|
360000
|
360000
|
|
3 Доп. ЗП
|
|
72000
|
36000
|
36000
|
|
4 ЕСН
|
% к п.2
|
205920
|
102960
|
102960
|
|
4 Амортизация
|
СобНам
|
130464
|
171414
|
-40950
|
|
5 Расходы на содержание и
эксплуатацию
|
с учетом коэффициента
надежности
|
150000
|
134211
|
15789
|
|
6 Потери
|
КбЗбQ
|
32000
|
17000
|
15000
|
|
7 Цеховые расходы
|
% к п.4
|
432000
|
216000
|
216000
|
|
8 Цеховая себестоимость
|
Σn.1+…7
|
2136584
|
1352945
|
783639
|
|
9 Общезаводские расходы
|
% к п.8
|
1068292
|
676472
|
391820
|
|
10 Производственная
себестоимость
|
Σn.n.8+9
|
3204876
|
2029417
|
1175459
|
|
11 Внепроизводственныеные
расходы
|
% к п. 10
|
320488
|
202942
|
117546
|
|
12 Полная себестоимость
|
Σn.n.10+11
|
3525364
|
2232358
|
1293005
|
|
13 Удельная себестоимость
руб./куб.м.
|
|
20
|
13
|
7
|
Годовой экономический эффект определяем по формуле
Эгод = (Зб - Зпр)  Qпр - Ен КВ, Qпр - Ен КВ,
где Зб, Зпр - удельные затраты на производство продукции по базовому и
проектному вариантам, руб/т;пр - готовый объем производства продукции в
натуральном измерении;
КВ - капитальные вложения, руб;
Ен - нормативный коэффициент экономической эффективности капитальных
вложений.
Годовой экономический эффект от внедрения АСУ
Эгод = (20 - 13) 170000 - 0,44 1067526 =720289 руб. 1067526 =720289 руб.
Для определения расчетного срока окупаемости Ток и расчетного
коэффициента экономической эффективности Кэф используем формулы
Ток = Цпр /Эгод,
Ток = 1067526 / 720289 = 1,5.
Таким образом срок окупаемости проекта составляет 18 месяцев.
11.
Метрологическое обеспечение
.1 Обоснование выбора средств автоматизации
Все помещения рассматриваемого объекта автоматизации относятся к
категории Д. Исходя из этих и других данных был выбран следующий комплекс
технических средств автоматизации: программируемый логический контроллер ОВЕН
ПЛК150, модуль дискретного ввода-вывода ОВЕН МДВВ, модуль аналогового ввода
ОВЕН МВА8, преобразователь давления ОВЕН ПД100, датчик уровня ОВЕН ПДУ,
расходомер ПРЭМ 80, устройство плавного пуска Siemens Sirius 3RW40, частотный
преобразователь ОВЕН ПЧВ.
При выборе средств автоматизации наибольшее предпочтение отдавалось
продукции фирмы «Овен» по двум основным причинам: соответствие цены качеству и
большой объем качественной документации, в том числе на русском языке.
11.1.1 Метрологические характеристики датчика давления ОВЕН ПД100
Датчики серии ОВЕН ПД100-ДИ предназначены для непрерывного преобразования
избыточного давления измеряемой среды в унифицированный сигнал постоянного тока
от 4 до 20 мА.
Датчики избыточного давления предназначены для систем автоматического
регулирования, управления и индикации в различных областях промышленности,
жилищно-коммунального хозяйства, на тепловых пунктах и т.п.
Данные датчики обладают следующими метрологическими характеристиками:
выходной сигнал: от 4 до 20 мА постоянного тока;
диапазон рабочих температур контроллируемой среды: от минус 40
до 100 °С;
диапазон рабочих температур окружающего воздуха: от минус 40 до
80 °С;
пределы допустимой основной погрешности измерения: не более
(±0,25) %;
напряжение постоянного питания: от 12 до 36 В;
потребляемая мощность: не более 0,8 Вт;
среднее время наработки на отказ: не менее 50000 часов;
средний срок службы: не менее 12 лет.
11.1.2 Метрологические характеристики датчика уровня ОВЕН ДС.1
Датчики уровня кондуктометрического типа, предназначены для измерения и
сигнализации уровней жидкостей.
Принцип действия датчиков основан на изменении электропроводности между
общим и сигнальными электродами в зависимости от уровня измеренного вещества.
Датчики обладают следующими характеристиками:
материал изолятора: фторопласт;
материал электрода: 12Х18Н10Г;
длина электрода: 0,5 м;
напряжение, подаваемое на электроды датчика: не более 24 В;
рабочее положение: вертикально и горизонтальное;
рабочее избыточное давление: не более 2,5 МПа;
температура: не более 100 °С;
средний срок службы: не менее 12 лет.
11.2 Поверка датчика давления ОВЕН ПД100
Рассмотрим методику поверки преобразователя давления ОВЕН ПД100.
Преобразователи используются для непрерывного преобразования значений
измеряемых величин давлений (абсолютного, избыточного, гидростатического,
дифференциального, разрежения и других физических величин, определяемых по
давлению или по разности давлений (например, уровень и плотность жидкости,
расход жидкости, газа или пара)) в унифицированный выходной аналоговый сигнал
постоянного тока от 4 до 20 мА и (или) цифровой сигнал в стандарте протоколов
HART или RS-485.
При проведении первичной и периодической поверок выполняют следующие
операции:
внешний осмотр;
опробование;
определение основной погрешности измерения;
определении вариации выходного сигнала.
11.2.1 Средства поверки
При проведении поверки применяют средства, указанные в таблице 11.1.
Т а б л и ц а 11.1 - Средства поверки
|
Наименование средства
поверки
|
Основные метрологические и
технические характеристики средств поверки
|
|
|
Задатчик давления
«Воздух-1600»
|
По ТУ 50-745-89. Пределы
воспроизведения избыточного давления от 20 Па до 16 кПа. Пределы допускаемой
основной погрешности в диапазоне от 20 до 500 Па - ±0,1 Па; свыше 500 Па и до
16 кПа - ±0,02 % от задаваемого давления. В комплекте с блоком опорного
давления (200, 300 Па и более) пределы воспроизведения разности давлений от 5
Па до 5 кПа; пределы допускаемой основной погрешностив диапазоне до (500 ±14)
Па
|
|
|
Задатчик давления
«Воздух-1,6»
|
По ТУ 50.552-86. Пределы
воспроизведения избыточного давления от 1 до 160 кПа. Пределы допускаемой
основной погрешности ±0,02 % и ±0,05 % от задаваемого давления.
|
|
|
Задатчик давления
«Воздух-2,5»
|
По ТУ 50.552-86. Пределы
воспроизведения избыточного давления от 2,5 до 250 кПа. Пределы допускаемой
основной погрешности ±0,02 % и ±0,05 % от задаваемого давления.
|
|
|
Задатчик давления
«Воздух-6,3»
|
По ТУ 50.552-86. Пределы
воспроизведения избыточного давления от 10 до 630 кПа. Пределы допускаемой
основной погрешности ±0,02 % и ±0,05 %.
|
|
|
Задатчик вакуумметрического
давления «Воздух-0,4В»
|
По ТУ 50.732-89. Пределы
воспроизведения разрежения от минус 0,8 до минус 40 кПа. Пределы допускаемой
основной абсолютной погрешности ±0,08 Па в диапазоне измерений 0,8-4,0 кПа.
Пределы допускаемой основной погрешности в диапазоне измерений от 4 от 40
кПа: ±0,02 %, ±0,05 % от задаваемого давления.
|
|
|
Манометр грузопоршневой
МП-2,5 I и II разрядов. ГОСТ 8291-83
|
По ТУ
4212-014-55862958-2005. Пределы допускаемой основной погрешности: ±0,02 %,
±0,05 % от измеряемого давления в диапазоне измерений от 25 кПа до 0,25 МПа.
|
|
Манометр грузопоршневой
МП-6 I и II разрядов. ГОСТ 8291-83
|
По ТУ
4212-014-55862958-2005. Пределы допускаемой основной погрешности: ±0,02 %,
±0,05 % от измеряемого давления в диапазоне измерений от 0,04 до 0,6 МПа
|
|
Манометр грузопоршневой
МП-60 I и II разрядов. ГОСТ 8291-83
|
По ТУ
4212-014-55862958-2005. Пределы допускаемой основной погрешности: ±0,02 %,
±0,05 % от измеряемого давления в диапазоне измерений от 0,1 до 6 МПа.
|
|
Манометр
грузопоршневойМП-600 I и II разрядов. ГОСТ 8291-83
|
По ТУ
4212-014-55862958-2005. Пределы допускаемой основной погрешности: ±0,02 %,
±0,05 % от измеряемого давления в диапазоне измерений от 1 до 60 МПа.
|
|
Манометр грузопоршневой
МП-2500 II разряда. ГОСТ 8291-83
|
По ТУ
4212-014-55862958-2005. Пределы допускаемой основной погрешности ±0,05 % от
измеряемого давления в диапазоне измерений от 25 до 250 МПа.
|
|
Манометр грузопоршневой
МВП-2.5. ГОСТ 8291-83
|
По ТУ 4212-005-48318935-99.
Пределы измерений избыточного давления 0-0,25 МПа; вакуумметрического
давления 0-0,1 МПа. Пределы допускаемой основной погрешности: ±5 Па при
давлении в пределах 0-0,01 МПа и ±0,05 % от измеряемого значения при давлении
свыше 0,01 МПа.
|
|
Задатчик вакуумметрического
давления «Метран-503»
|
По ТУ 4381-003-36897690-03.
Пределы разрежения от минус 0,6 до минус 60 кПа. Пределы допускаемой основной
абсолютной погрешности ±0,6 Па. Пределы допускаемой основной погрешности в
диапазоне измерений 4-60 кПа ±0,02 % от задаваемого давления.
|
|
Вакуумметр
теплоэлектрический ВТБ-1
|
Пределыизмерений от 0,002
до 750 мм рт. ст.
|
|
Манометр для точных
измерений МТИ
|
По ТУ 25-05-1481-73.
Пределы измерений от 0,25 до 160 МПа; класс точности 0,6.
|
|
Вакуумметр для точных
измерений ВТИ
|
По ТУ 25-05-1481-73.
Пределы измерений от 0 до 0,1 МПа; класс точности 1.
|
|
Термометр ртутный
стеклянный лабораторный ТЛ-4, № 2
|
По ТУ 25-2021.003-88.
Пределы измерений от 0 до 55 °С. Цена деления шкалы 0,1 °С; пределы
допускаемой погрешности ±0,2 °С.
|
|
Магазин сопротивлений
Р4831. ГОСТ 23737-79
|
По ТУ 25-04.3919-80.
Сопротивление до 111111,1 Ом; класс точности 0,02/2⋅10-6.
|
|
Вольтметр универсальный
В7-54/3. ГОСТ Р 51350-99
|
По УШЯИ.411182.001 ТУ.
Верхний предел измерений постоянного тока 2 А. Максимальная разрешающая
способность 1 мкА; 100 нВ. Точность измерения по постоянному току 0,0015 %.
|
|
Вольтметр универсальный
цифровой В7-40
|
По Тг2.710.016 ТУ. Основная
погрешность при измерении напряжения постоянного тока не более ±0,1 %.
|
|
Источник постоянного
напряжения Б5-49
|
Напряжение от 0,1 до 49,9
В, ток от 0,001 до 0,99 А.
|
|
IBM-совместимый компьютер
|
Процессор PIII-500, ОЗУ 128
Мб; порт COM, порт USB. ОС Windows 98/2000/XP.
|
|
Преобразователь интерфейсаАС3-М
(«ПО ОВЕН»). ТУ 4218-001-46526536-2006
|
Автоматический
преобразователь интерфейсов RS-232/RS-485 - устройство для связи с
преобразователем давления по цифровому протоколу на базе интерфейса RS-485.
|
|
Модем HART/RS-232
|
Преобразователь сигналов
HART в сигналы интерфейса RS-232 для связи преобразователя давления с
компьютером через его стандартный последовательный порт.
|
|
|
|
|
11.2.2 Условия поверки
При проведении поверки соблюдают следующие условия:
температура окружающего воздуха при поверке должна быть
(23±5)°С;
относительная влажность воздуха от 30% до 80 %;
атмосферное давление от 84,0 до 106,7 кПа (от 630 до 800 мм рт.
cт.);
напряжение питания постоянного тока (24±2) В - для
преобразователей без встроенного индикатора и (36±2) В - для преобразователей
со встроенным индикатором;
сопротивление нагрузки при поверке преобразователей с аналоговым
выходным сигналом от 4 до 20 мА должно быть (500±50) Ом; с цифровым выходным
сигналом - в соответствии с технической документацией на преобразователь;
измеряемая среда согласно разделу 6 ГОСТ 22520;
рабочее положение преобразователя - любое;
колебания давления окружающего воздуха, вибрация, тряска, удары,
наклоны, магнитные поля, кроме земного, влияющие на работу преобразователей,
должны отсутствовать;
импульсную линию, через которую подают измеряемое давление,
допускается соединять с дополнительными сосудами, емкость каждого из которых не
более 50 литров.
Средства поверки и поверяемые приборы должны быть защищены от вибраций и
ударов. Средства поверки, оборудование, стенды и устройства, в том числе
программное обеспечение, применяемые при поверке, должны иметь паспорт и быть
аттестованы в соответствии с действующей нормативно-технической документацией.
11.2.3 Внешний осмотр
При внешнем осмотре проверяется соответствие следующим требованиям:
преобразователь должен быть представлен на поверку с
эксплуатационной документацией, входящей в комплект поставки
(Паспорт и Руководство по эксплуатации);
на преобразователе должна быть маркировка, соответствующая Руководству
по эксплуатации;
преобразователь должен быть чистым и не иметь видимых
механическихповреждений (трещин, сколов и других) на корпусе;
резьба на присоединительных элементах не должна иметь сорванных
ниток;
преобразователь не должен иметь механических повреждений
клеммных соединителей.
При обнаружении механических дефектов, а также несоответствия маркировки
эксплуатационной документации, определяется возможность проведения поверки и
дальнейшего использования преобразователя.
11.2.4 Опробование
При опробовании проверяют герметичность и преобразователя,
функционирование корректора «нуля».
Включить проверяемый преобразователь согласно руководству по
эксплуатации.
Работоспособность преобразователя проверяют, изменяя измеряемую величину
от нижнего до верхнего предельных значений. При этом должно наблюдаться
изменение выходного сигнала и индикации на дополнительных выходных устройствах.
При проверке работоспособности поверку проводят:
для преобразователя давления-разрежения только при избыточном
давлении;
для преобразователя разрежения с ВПИ 100 кПа при изменении
разрежения до значения не менее 0,9 атмосферного давления.
Проверку функционирования программного корректора «нуля» выполняют
следующим образом:
задав одно (любое) значение измеряемой величины в пределах,
оговоренных Руководством по эксплуатации, с помощью программы «Конфигуратор ПД»
возвращают выходной сигнал (показания индикатора) к первоначальному значению;
сбрасывают измеряемую величину и при атмосферном давлении на
входе преобразователя с помощью программы «Конфигуратор ПД» вновь устанавливают
выходной сигнал (показания индикатора) в соответствие с исходными значениями.
Проверку герметичности преобразователя рекомендуется совмещать с
операцией определения его основной погрешности.
Методика проверки герметичности преобразователя аналогична методике
проверки герметичности пневматической, но изменение давления (разрежения)
определяют по изменению выходного сигнала или по изменению показаний
цифрового индикатора поверяемого преобразователя, включенного в систему.
В случае обнаружения не герметичности системы с установленным поверяемым
преобразователем следует раздельно проверить герметичность системы и
преобразователя.
11.2.5 Определение основной погрешности измерения
При первичной поверке значения основной приведенной
погрешности преобразователя определять в диапазонах измерений,
соответствующих максимальному и минимальному ВПИ.
При периодической поверке в случае, когда ВПИ не известен, либо
может изменяться в процессе эксплуатации преобразователя, поверка производится
по методике первичной поверки. В случае, когда преобразователь работает
только с заданным пользователем ВПИ преобразователя, допускается определять
погрешность преобразователя при работе только в указанном диапазоне измерений,
при этом в свидетельстве о поверке указывается диапазон измерений.
Основную приведенную погрешность преобразователя определяется любым из
двух способов:
) на входе преобразователя устанавливают номинальные значения входной
измеряемой величины (например, давления) по эталонному средству измерений
(СИ), а по другому СИ контролируют соответствующие значения выходного
аналогового сигнала. При поверке преобразователя по его цифровому сигналу к
выходу подключают приемное устройство, поддерживающее соответствующий
цифровой коммуникационный протокол для считывания информации.
) устанавливают номинальные значения выходного аналогового сигнала или
устанавливают номинальные значения цифрового сигнала преобразователя по
эталонному СИ, а по другому СИ измеряют соответствующие значения входной
величины давления.
Расчетные значения выходного сигнала поверяемого преобразователя для
заданного номинального значения входной измеряемой величины
определяют следующим образом:
где Ipасч - расчетное значение выходного сигнала постоянного тока (мА);н,
Iв - соответственно нижнее и верхнее предельные значения выходного сигнала
преобразователя (Iн =4 мА, Iв =20 мА);- действительное значение входной
измеряемой величины (для преобразователей давления-разрежения
значение в области разрежения подставляется в формулу со знаком минус), (кПа,
МПа);в - ВПИ (или диапазон измерений) поверяемого преобразователя (кПа,
МПа);
Рн - нижний предел измерений для всех преобразователей,
кроме преобразователей давления-разрежения, для которых это значение
численно равно ВПИ в области разрежения Pв и в формулу подставляется со знаком
минус (кПа, МПа).
Для стандартных условий нижний предел измерений всех
поверяемых преобразователей избыточного давления, абсолютного давления,
разрежения, разности давлений и преобразователей
давления-разрежения равен нулю.
11.2.6 Определение вариации выходного сигнала
Вариацию выходного сигнала определяют при каждом поверяемом значении
измеряемой величины, кроме значений, соответствующих нижнему и
верхнему пределам измерений, по данным, полученным экспериментально при
определении основной погрешности.
Вариацию выходного сигнала вычисляют по формулам, зависящим от выбранного
способа поверки.
При поверке преобразователей по способу 1 используются формулы:
где V - вариация выходного сигнала, %;пр, Iобр - значения выходного
сигнала постоянного тока при одном и том же номинальном значении входной
измеряемой величины, полученные при прямом и обратном ходе,
соответственно, мА;пр, Nобр - значения выходного сигнала преобразователя в
цифровом формате при одном и том же номинальном значении входной
измеряемой величины, полученные при прямом и обратном ходе,
соответственно;норм, Nнорм - нормирующее значение, равное разности между
верхним и нижним предельными значениями выходного сигнала преобразователя, мА.
При поверке преобразователей по способу 2 используется формула
где V - вариация выходного сигнала, %;пр, Pобр - значения входной
измеряемой величины (давления), полученные экспериментально при прямом и
обратном ходе и при одном и том же номинальном значении выходного сигнала, кПа,
МПа;В - ВПИ (или диапазон измерений) поверяемого преобразователя, кПа,
МПа.
12.
Безопасность жизнедеятельности
.1 Значение и задачи безопасности жизнедеятельности
Безопасность жизнедеятельности - система обеспечения безопасности жизни и
здоровья работников в процессе трудовой деятельности, включающая правовые,
социально-экономические, организационно-технические, санитарно-гигиенические,
лечебно-профилактические, реабилитационные и иные мероприятия.
Она включает следующие группы норм:
правила по технике безопасности и производственной санитарии;
специальные нормы охраны труда лиц, работающих в тяжелых,
вредных и опасных производственных условиях;
нормы по охране труда женщин, несовершеннолетних и лиц
пониженной трудоспособностью;
нормы, регулирующие деятельность органов государственного
надзора и общественного контроля, а также устанавливающие ответственность за
нарушения законодательства об охране труда;
нормы, регулирующие планирование и организацию работы по охране
труда.
Основные функции БЖД:
Описание жизненного пространства.
Формирование требований безопасности к источникам негативных
факторов - назначение ПДК, ПДУ, допустимого риска и т. д.
Организация мониторинга состояния среды обитания и
инспекционного контроля источников негативного воздействия.
Разработку и использование средств био-защиты.
Реализацию мер по предупреждению и ликвидации последствий ЧС.
Обучение населения основам БЖД, подготовку специалистов всех
уровней и форм деятельности.
Решение проблемы безопасности состоит в обеспечении нормальных условий
деятельности людей, защите человека и окружающей его среды от воздействия
вредных факторов, которые имеют место на рассматриваемом в данной работе
объекте - системе водоснабжения.
Поддержание оптимальных условий деятельности и отдыха человека создает
предпосылки для наибольшей работоспособности и продуктивности.
.2 Анализ условий труда и мероприятия воздействия вредных
производственных факторов
В данной работе рассматривается автоматизация системы водоснабжения,
которая включает в себя три удаленных друг от друга помещения. В силу свой
специфики каждое помещение имеет ряд вредных производственных факторов, а так
же возможность возникновения аварийной ситуации. Основной целью безопасности
жизнедеятельности является сведение всех вредных производственных факторов до
безопасного уровня, а так же пред усмотрение способов ликвидации чрезвычайных
ситуаций.
В настоящее время действует трудовой кодекс РФ от 30.12.2001 года.
Согласно статье 212 настоящего трудового кодекса Российской Федерации
требования безопасности рабочих мест состоят из следующих пунктов:
) Здания (сооружения), в которых размещаются рабочие места, по
своему строению должны соответствовать их функциональному назначению и
требованиям безопасности и охраны труда.
) Рабочее оборудование должно соответствовать нормам безопасности,
установленным для данного вида оборудования, иметь соответствующие знаки
предупреждения и обеспечиваться ограждениями или защитными устройствами для
обеспечения безопасности работников на рабочих местах.
) Аварийные пути и выходы работников из помещения должны
оставаться свободными и выводить на открытый воздух либо в безопасную зону.
) Опасные зоны должны быть четко обозначены. Если рабочие места
находятся в опасных зонах, в которых ввиду характера работы существует риск для
работника или падающих предметов, то такие места должны оснащаться по
возможности устройствами, преграждающими доступ в эти зоны посторонним. По
территории организации пешеходы и технологические транспортные средства должны
перемещаться в безопасных условиях.
) Работники должны иметь средства индивидуальной защиты для
проведения работы в опасных производственных объектах (участках), в том числе
на высоте, подземных условиях, открытых камерах, на шельфах морей и внутренних
водоемах.
) В течение рабочего времени температура, естественное и
искусственное освещение, а также вентиляция в помещении, где располагаются
рабочие места, должны соответствовать безопасным условиям труда.
) Работники допускаются на работу с вредными условиями труда
(запыленность, загазованность и другие факторы) после обеспечения работодателем
безопасных условий труда.
12.2.1 Анализ вредных и опасных факторов на рабочем месте
Широкое распространение микроэлектроники, компьютеров индивидуального
пользования, мощных средств автоматизированной обработки текста и графической
информации, высоко эффективных устройств ее хранения и поиска, современных
средств связи и сетей электронно-вычислительных машин ставит перед охраной
труда новые проблемы. Рассматриваемая система автоматизации использует большое
количество таких технический средств.
Работа операторов, программистов и просто пользователей непосредственно
связана компьютерами, а соответственно с дополнительными вредными воздействиями
целой группы факторов, что существенно снижает производительность их труда.
Работа обслуживающего персонала производится сидя, стоя, или связана с ходьбой,
не требует систематического физического напряжения и относится к категории
«легкая». Монотонная работа за компьютером вызывает быструю утомляемость
человека, приводит к ухудшению его здоровья и повышает расход энергии от 60 до
100 %. Оператор, на которого возлагаются обязанности по контролю исправного
функционирования всей системы водосбажения с помощью ПЭВМ и SCADA-системы,
подвергается воздействию вредных и опасных факторов производственной среды:
опасность поражения электрическим током при контакте с
токоведущими проводами, корпусами ЭВМ, оказавшимися под напряжением в
результате пробоя изоляции;
электромагнитные поля;
статическое электричество;
шум;
неблагоприятные метеорологические условия;
недостаточная освещенность;
психоэмоциональное напряжение зрительного аппарата с появлением
жалоб на неудовлетворенность работой, головную боль и др.
Режим работы персонала, обслуживающего систему водозабора, составляет 8
часов в смену при непрерывном технологическом процессе производства. Основным
перерывом является перерыв на обед. В режиме труда должны быть предусмотрены
дополнительно два перерыва. Перерыв на обед устанавливается через 4 часа от
начала работы.
Персонал обслуживает оборудование на площадке, а также работает с ПЭВМ,
которые расположены в операторной. Время работы на ПЭВМ не должно превышать
двух часов подряд. Дополнительные регламентные перерывы необходимо
предоставлять через 2 часа работы после начала смены и через 1.5 - 2 часа после
обеденного перерыва.
При работе с ПЭВМ необходимо выполнять комплексы упражнений для глаз,
упражнения выполняются сидя или стоя, отвернувшись от экрана при ритмичном
дыхании, с максимальной амплитудой движения глаз.
Рабочие места с дисплеями располагаются между собой на расстоянии не
менее 1,5 м. Организация рабочих мест оператора в УОГ осуществляется на основе
современных эргономических требований. Конструкция рабочей мебели (кресла
оператора) обеспечивает возможность индивидуальной регулировки соответственно
росту рабочего и создания удобной позы.
Обязанности работника по обеспечению охраны труда на данном предприятии:
а) соблюдать нормы, правила и инструкции по охране труда;
б) правильно применять коллективные и индивидуальные средства защиты;
в) немедленно сообщать своему непосредственному руководителю о любом
несчастном случае, происшедшем на производстве, о признаках профессионального
заболевания, а также о ситуации, которая создает угрозу жизни и здоровью людей.
Когда полностью устранить вредное воздействие на организм работника
невозможно, законодатель устанавливает иные меры и средства индивидуальной
защиты и применение других, оптимально нейтрализующих вредность веществ,
недопущение к тяжелым и вредным работам лиц, чье здоровье не соответствует
необходимым требованиям.
12.2.2 Санитарно-гигиенические требования к помещениям
Метеорологические условия производственных помещений (микроклимат)
определяются действующими на организм человека сочетаниями температуры,
относительной влажности, скорости движения воздуха, барометрического давления.
Неблагоприятные условия резко ухудшают самочувствие человека, снижают
производительность труда и часто приводят к различным заболеваниям.
ГОСТ 12.1.005 устанавливает оптимальные и допустимые метеорологические
нормы в рабочих помещениях в зависимости от сезона, категории работ, избытков
явного тепла, которые показаны в таблице 12.1.
Т а б л и ц а 12.1 - Оптимальные нормы температуры, относительной
влажности, скорости движения воздуха в рабочей зоне
|
Период года
|
Категория работ
|
Температура, оС
|
Относительная влажность, %
|
Скорость движения воздуха,
м/с, не более
|
|
Холодный
|
1а б
|
21…25 20…24
|
75 75
|
0,1 0,2
|
|
Теплый
|
а б
|
22…28 21…28
|
55 60
|
0,1…0,2 0,1…0,3
|
Данный объект находится на территории Краснодарского края. В
рассматриваемом помещении диспетчерского пункта системы водоснабжения параметры
микроклимата на рабочих местах отвечают требованиям нормативов.
12.2.3 Производственный шум и вибрации
Шум и вибрации отрицательно влияют на здоровье человека и могут привести
к травмам или профессиональным заболеваниям. Шум на рабочих местах не должен
превышать допустимых уровней ГОСТ 12.1.003. В таблице 12.2 приведены допустимые
уровни шума на рабочих местах.
Т а б л и ц а 12.2 - Допустимые уровни шума на рабочих местах
|
Рабочие места
|
Уровни звукового давления,
дБ в октановых полосах со среднегеометрическими частотами, Гц
|
|
63
|
125
|
250
|
500
|
1000
|
2000
|
4000
|
8000
|
|
Помещения управления,
рабочие комнаты
|
79
|
70
|
63
|
58
|
55
|
52
|
50
|
49
|
|
Помещения для размещения
шумных машин
|
94
|
87
|
82
|
78
|
75
|
71
|
70
|
80
|
Основными источниками шума в данной системе водоснабжения являются
дренажные и сетевые насосы. До автоматизации подразумевалось, что персонал
будет находиться в помещении водозабора вблизи дренажных насосов каждый час в
течении некоторого времени, достаточного для проверки состояния и
включения/выключения насосов. После автоматизации необходимость находиться в
здании водозабора полностью отсутствует, поэтому персонал не попадает под влияние
шума от дренажных насосов.
Сетевые насосы находятся в отдельной комнате и имеет низкий уровень шума
за счет использования частотного преобразователя и работы не на полную
мощность.
В диспетчерском пункте основным источником шума являются ПЭВМ, уровень
которого сведен до минимума за счет использования в большинстве мест системного
блока пассивного охлаждения.
12.2.4 Освещенность
Освещение операторной установки осушки газа с нормальными условиями среды
предусматривается светильниками с газоразрядными лампами и светильниками с
люминесцентными лампами, соответствующими классу помещений и категории.
Световые проемы, преимущественно должны быть ориентированы на север и
северо-восток, и обеспечивать коэффициент естественной освещенности не ниже
1,5%.
Правильно организованное освещение создает благоприятные условия труда,
повышает работоспособность и производительность труда. Освещение на рабочем
месте оператора должно быть таким, чтобы работник мог без напряжения зрения
выполнять свою работу. Утомляемость органов зрения зависит от ряда причин:
недостаточность освещенности;
чрезмерная освещенность;
неправильное направление света.
Недостаточность освещения приводит к напряжению зрения, ослабляет
внимание, приводит к наступлению преждевременной утомленности. Чрезмерно яркое
освещение вызывает ослепление, раздражение и резь в глазах. Неправильное
направление света на рабочем месте может создавать резкие тени, блики,
дезориентировать работающего. Все эти причины могут привести к несчастному
случаю или профзаболеваниям, поэтому столь важен правильный расчет
освещенности.
В помещении диспетчерского пункта системы водоснабжения предусматривается
смешанное освещение: естественное и искусственное в соответствии со СНиП 23-05.
Искусственное освещение в помещениях осуществляется с помощью люминесцентных
ламп ЛБ-80 в светильниках общего освещения: светильники располагаются над
рабочими поверхностями в шахматном порядке. Осветительные установки
обеспечивают равномерную освещенность с помощью отраженного и рассеянного светораспределения.
Для исключения бликов отражения на экранах от светильников общего освещения
применяются специальные антибликовые сетки и фильтры для экранов, защитные
козырьки. Источники света по отношению к рабочему месту расположены таким
образом, чтобы исключить попадания в глаза прямого света.
12.3 Расчет освещения
Рассчитаем освещение для диспетчерского пункта рассматриваемой системы
водоснабжения, где персонал проводит большую часть времени. Расчет будем
производить с помощью метода коэффициента использования. Метод коэффициента
использования является базовым методом ручного расчета освещения и широко
применяется в проектной практике, позволяя быстро оценить предлагаемое решение.
Основными допущениями метода являются:
однородность (т.е. равномерное распределение) светимости
отражающих поверхностей (как вторичных излучателей), окружающих освещаемое
помещение;
диффузность (т.е. ламбертовский характер) светимости этих
поверхностей;
усреднение коэффициентов отражения по отражающим поверхностям.
Необходимые данные:
таблица коэффициентов использования;
таблица коэффициентов отражения;
таблица рекомендуемых уровней освещенности;
таблица номинального светового потока ламп.
Помещение диспетчерского пункта, для которого расчитывается искусственное
освещение представляет собой комнату со стенами бежевого цвета, длиной 4 метра
и шириной 4 метра. Высота помещения составляет 2,5 метра. Коэффициент отражения
потолка равен 70, стен - 50, пола - 20. Для искусственного освещения будем
использовать светильник ЛПО46-2х36-604 Luxe - КПД - 80%, расчетная высота
подвеса - 70 мм и люминесцентные лампы Т8 36 Вт, Фламп = 2500 лм (в одном
светильнике 2 лампы).
12.3.1 Определение площади помещения
Прощадь расчитывается по следующей формуле:
= a x b.
Расчитаем площаль помещения:= 4 x 4 = 16 м.кв.
12.3.2 Определение индекса помещения
Индекс помещения расчитываетя по следующей формуле:
= S / (hp x (a + b)),
где hp - расчетная высота;
= (h - (h1 + h2));
- высота помещения, м;- высота подвеса светильника, м;- расстояние от
пола до рабочей поверхности, м.
Рассчитаем индекс помещения:= (2,5 - (0,74 + 0,07)) = 1,69 м,= 16 / (1,69
x (4 + 4)) = 1,18.
12.3.3 Определение требуемого количества светильников
Требуемое количество светильников рассчитывается по следующей формуле:
= (E x S x k x z x 100)/(n x Фламп x η),
где Е - освещенность, лк;- коэффициент запаса;- коэффициент
неравномерности освещения;- число ламп в одном светильнике, штук;
Фламп - световой поток лампы, лм;
η - коэффициент использования
светильника.
Примем коэффициент запаса k = 1,2 и коэффициент неравномерности освещения
z = Eср/Емин = 1,1. Норма освещенности для офиса на рабочей плоскости 400 лк.
Расчитаем требуемое количество светильников:= (400 x 16 x 1,2 x 1,1 x
100)/(2 x 2500 x 46) = 3,67 ~ 4 штуки
Для данного помещения требуется 4 светильника, равномерно распределенных
по поверхности потолка.
12.4 Обеспечение электробезопасности
В соответствие с ГОСТ 12.1.009 электробезопасность - это система
организационных и технических мероприятий и средств, обеспечивающих защиту
людей от вредного и опасного воздействия электрического тока, электрической
дуги, электромагнитного поля и статического электричества.
Все случаи поражения током являются результатом прикосновения человека не
менее чем к двум точкам цепи, между которыми существует напряжение. В таблице
12.3 приведены предельно допустимые значения напряжения прикосновения и тока
ГОСТ 12.1.038.
Каждое помещение рассматриваемой системы водоснабжения имеет изобилие
электротехнического оборудования. Каждая единица такого оборудования должна
предусматривать какие-либо способы защиты.
Т а б л и ц а 12.3 - Предельно допустимые значения напряжения
прикосновения и тока
|
Род тока
|
Напряжение, В
|
|
не более
|
|
Переменный, 50 Гц
|
2,0
|
0,3
|
Меры защиты, применяемые в электроустановках, подразделяются на меры,
обеспечивающие безопасность при нормальном режиме работы электроустановок, и
меры, обеспечивающие безопасность при аварийном режиме.
Электрооборудование в помещенияхданной системы водоснабжения выбрано в
соответствии с классификацией помещений по опасности поражения электрическим
током и по классификации оборудования по способу защиты человека.
К мероприятиям по электробезопасности относятся:
недоступное расположение токоведущих частей;
надежная изоляция;
применение малого напряжения;
использование блокировок;
использование систем защитного отключения;
заземление (сопротивление заземления не превышает 4 Ом);
защитное зануление электрозащитных приспособлений и другое.
Защитой от электромагнитных полей служит герметизация агрегатов,
экранирующие устройства, защитное оборудование, электротехнические устройства.
12.5 Пожарная безопасность
Каждое помещение данной системы водоснабжение имеет изобилие устройств,
которые работают под напряжением и имеют большую мощность, что влечет за собой
вероятность возникновения короткого замыкания и в итоге может привести к
пожару.
Для обеспечения пожарной безопасности в помещениях водозабора обязательно
должны быть средства пожаротушения: огнетушители, емкости с песком, пожарные
краны, гидранты и. т. д.
На предприятии обязательно должны проводиться мероприятия по пожарной
профилактике. Мероприятия по пожарной профилактике разделяются на
организационные, технические, режимные и эксплуатационные.
Организационные мероприятия предусматривают правильную эксплуатацию
оборудования, противопожарный инструктаж рабочих и служащих, организацию
добровольных пожарных дружин, пожарно-технических комиссий, издание приказов по
вопросам усиления пожарной безопасности.
К техническим мероприятиям относится соблюдение противопожарных правил,
норм при проектировании зданий, при устройстве электропроводов и оборудования,
отопления, вентиляции, освещения, правильное размещение оборудования.
Мероприятия режимного характера - это запрещение курения в неустановленных
местах, производства сварочных и других огневых работ в пожароопасных
помещениях и. т. д.
12.6 Безопасность жизнедеятельности в чрезвычайных ситуациях
Здание, в котором расположены сетевые насосы и диспетчерский пункт,
относится к типу Б. Повреждение зданий этого типа происходит при землетрясении
от 6 баллов. Землетрясений такой силы в краснодарском крае не зафиксировано,
поэтому принимать меры по защиты от землетрясений не целесообразно.
Защита зданий и сооружений от ураганов обеспечивается на этапе строительства.
Защита от молний состоит в применении громоотводов.
Для предупреждения аварий и аварийных ситуаций, сохранения оборудования и
охраны здоровья и жизни обслуживающего персонала необходимо строгое соблюдение
правил техники безопасности, регулярная проверка работоспособность средств
автоматики, сигнализации и блокировки.
Автоматизация данной системы водоснабжения ставит перед собой цели не
только достижения положительно экономического эффекта, но также и улучшения
ситуации в сфере безопасности жизнедеятельности. Вследствие автоматизации
данного технологического процесса достигается повышение уровня безопасности, а
так же снижение вредных воздействий на рабочий персонал. После автоматизации
пропадает необходимость находиться в насосных первого подъема, где персонал
может попадать под такие вредные факторы, как шум и вибрация, создающиеся
дренажными насосами, работающими на полную мощность. До внедрения системы
автоматизации необходимо было иметь вдвое большой штат сотрудников. Для
контроля состояния системы и ее регулирования необходимо было обходить насосные
первого подъема, отслеживать уровень воды в скважине и давления в трубопроводе
и на основании этих показаний принимать решении о включении или выключении
насосов. Использование SCADA позволит осуществлять контроль и управления всей
системой из одного места - диспетчерского пункта, который оборудован в
соответствии со всеми правилами и исключит какие-либо вредные воздействия на
персонал. Более того большая часть технологических операций происходит в
автоматическом режиме, благодаря чему снижается нагрузка на оператора.
Заключение
В данной работе был детально разобран вопрос автоматизации системы
водоснабжения с использованием SCADA-системы. Была доказана экономическая
целесообразность данного мероприятия, произведен анализ исходных данных, выбран
комплекс необходимых технических средств и разработана документация к
автоматизированной системе управления.
Экономическая эффективность обусловлена снижением потребления
электроэнергии уменьшением количества обслуживающего персонала. В данной работе
экономическая эффективность была выражена в виде готового экономического
эффекта. Так же были рассчитаны стоимости работ, цена проекта в целом и срок
окупаемости.
На данном примере было доказано, что автоматизация объектов данного типа
более чем оправдана и резко улучшает не только экономические показатели, но и
условия труда персонала, а так же снижает вероятность возникновения аварийных
ситуаций. В процессе дипломного проектирования была разработана SCADA система,
которая кардинально облегчает контроль и управление автоматизированными
системами управления данного типа.
Список использованных источников
1
Проектирование систем автоматизации технологических процессов: справочное
пособие / А.С. Клюев [и др.]; под ред. А.С. Клюева. - М.: Энергоатомиздат,
2015. - 464 с.
Техника
чтения схем автоматического управления и технологического контроля / А.С. Клюев
[и др.]; под ред. А. С. Клюева. - М. : Энергоатомиздат, 1991. - 432 с.
Автоматизация
технологических процессов пищевой промышленности / В.А. Соколов.- М.:
Агропромиздат, 1991. - 445 с.
Введение в
автоматизированное проектирование технических устройств и систем. / Норенков
И.П. -М.: Высшая школа, 1980. 310 с.
Автоматические
приборы, регуляторы и вычислительные системы / Т. Х. Безновская, В. А. Бек, М.
С. Горохова и др.; под ред. Б. Д. Кошарского. - Л. : Машиностроение, 1976. -
485 с.
Автоматизация
систем водоснабжения и водоотведения / А. А. Рульнов, К. Ю. Евстафьев.
Похожие работы на - Автоматизация системы бытового водоснабжения
|