Методики математической обработки результатов геодезических измерений в сетях сгущения
Методики
математической обработки результатов геодезических измерений в сетях сгущения
РЕФЕРАТ
В курсовой работе представлены расчеты по формулам.
При выполнении курсовой работы использовала три источника литературы.
Использовала необходимые формулы и схемы для выполнения вычислений.
Цель курсовой работы - освоение методики математической обработки
результатов геодезических измерений в сетях сгущения при выполнении следующих
заданий:
вычисления координат дополнительных пунктов, определённых прямой и
обратной многократной угловыми засечками;
упрощённого уравнивания системы ходов полигонометрии 2-го разряда с одной
узловой точкой;
уравнивания превышений технического нивелирования по способу полигонов
профессора В. В. Попова.
Курсовая работа определяется следующими ключевыми словами: засечка
обратная, засечка прямая, полигон нивелирный, оценка точности, полигонометрия,
сеть сгущения, пункт исходный, способ полигонов профессора В. В. Попова,
уравнивание.
Рассмотренные в курсовой работе задачи актуальны и по сей день. Сегодня
их выполняют по определённым алгоритмам, используя компьютерные программы.
СОДЕРЖАНИЕ
Перечень сокращений, обозначений, единиц, терминов
Введение
. Вычисление координат дополнительного пункта, определенного прямой
многократной засечкой
1.1 Сущность
задачи и исходные данные
.2 Порядок
решения и выполнения прямой угловой многократной засечки
.3 Оценка
ожидаемой точности полученных результатов
2. Вычисление координат дополнительного пункта, определенного
обратной многократной засечкой
2.1 Сущность
задачи и исходные данные
.2 Порядок
решения и выполнения обратной многократной засечки
.3 Оценка
ожидаемой точности полученных результатов
3. Уравнивание ходов полигонометрии 2-го разряда, образующих одну
узловую точку
3.1 Сущность
задачи
.2 Вычисление
координат исходных пунктов и дирекционных углов исходных направлений
.3 Вычисление
и уравнивание дирекционного угла узловой стороны
.4 Вычисление
и уравнивание координат узловой стороны
4. Уравнивание ходов технического нивелирования способом полигонов
профессора В.В. Попова
4.1 Сущность
задачи и исходные данные
.2
Уравнивание превышений по способу полигонов профессора В.В. Попова
.3 Вычисление
высот всех точек по ходам, по уравненным превышениям
.4 Оценка
точности полученных результатов
Заключение
Список использованных источников
ПЕРЕЧИНЬ СОКРАЩЕНИЙ, УСЛОВНЫХ ОБОЗНАЧЕНИЙ, ЕДИНИЦ, ТЕРМИНОВ
В курсовой
работе использовала различные сокращения:
км- километр;
мм-
миллиметр;
см.-
смотреть;
м- метр;
рис.-
рисунок;
см-
сантиметр;
т. е.- то
есть;
посл.-
последующий;
пред.-
предыдущий;
исх.-
исходный;
вероятн.-
вероятная;
доп.-
допустимая;
узл.-
узловая;
гр.- группа.
ВВЕДЕНИЕ
Целью математической обработки результатов измерений в геодезической сети
является устранение невязок, вычисление значений определяемых величин и оценка
точности результатов измерений. При строгом методе уравнивания результатов
измерений, о котором будет сказано далее, производится также оценка точности
полученных значений искомых величин.
Главной целью данной курсовой работы является получение знаний,
необходимых для уравнивания геодезических сетей сгущения упрощенными способами:
вычисление координат дополнительного пункта, определенного прямой
многократной засечкой;
вычисление координат дополнительного пункта, определенного обратной
многократной засечкой;
уравнивание ходов полигонометрии 2-го разряда, образующих одну узловую
точку;
уравнивание ходов технического нивелирования способом полигонов
профессора В.В. Попова
В настоящее время уравнивание геодезических сетей сгущения упрощенными
способами приобрело большую значимость, т.к. оно помогает быстро и рационально
решить поставленные задачи и получить точные результаты расчетов.
Задачи данной курсовой работы были рассчитаны по варианту 14.
1. ВЫЧИСЛЕНИЕ КООРДИНАТ ДОПОЛНИТЕЛЬНОГО ПУНКТА, ОПРЕДЕЛЕННОГО ПРЯМОЙ
МНОГОКРАТНОЙ ЗАСЕЧКОЙ
.1 Сущность задачи и исходные данные
Задача прямой засечки состоит в определении координат третьего пункта по
координатам двух исходных пунктов, двум исходным дирекционным углам и двум
измеренным углам при данных пунктах.
Для контроля правильности определения координат пункта засечку делают
многократной, т.е. используют более двух исходных пунктов, выполняя измерения
на них, что заранее предусматривается в проекте работ. При этом число вариантов
решения однократных засечек подсчитывают по формуле:
 (1)
(1)
где
n - число исходных пунктов.
Таким
образом, для решения задачи с контролем необходимо видеть определяемую точку с
трех пунктов исходной сети и измерить при них три угла.
Углы
между смежными направлениями на определяемый пункт должны быть не менее 30° и
не более 150°.
Таблица
1 - Исходные данные для решения прямой засечки.
|
Обозначение пункта
|
Измеренные величины
|
Координаты, м
|
|
|
Х
|
У
|
|
A
|
P
|
0°00'00''
|
5450.55 + ∆x
=5807.55
|
2300.09 + ∆y
= 2657.09
|
|
B
|
88°44'20''
+ ∆β' =89° 26'
20''
|
|
|
|
B
|
A
|
0°00'00''
|
4751.04
+ ∆x =5108.04
|
2049.60 + ∆y
= 2406.60
|
|
P
|
43°16'20''
- ∆β' =42° 34'
20''
|
|
|
|
C
|
72°57'28''
|
|
|
|
C
|
B
|
0°00'00''
|
4711.24
+ ∆x =5068.24
|
2906.33+ ∆y
= 3263.33
|
|
P
|
91°15'39''
- ∆β' =90° 33'
39''
|
|
|
∆β΄ = +3΄ × № вар. = +3΄
× 14 = +42΄
∆x = ∆y = 25.50 × № вар. = 25.50 ×
14 = 357 м
При выполнении задания предусматривается использование формул Юнга и
исходных данных с табл. 1.
.2 Порядок решения и выполнения прямой угловой многократной засечки
Порядок решения:
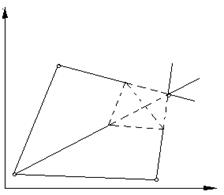
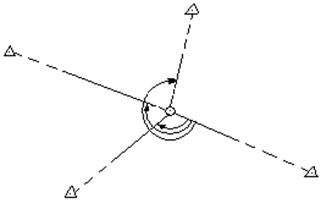
Для решения прямой угловой многократной засечки составляем схему (рис.1)
расположения исходных и определяемого пунктов - А, В, С и Р, используя
посчитанные координаты и углы, где А, В, С - твердые пункты, Р - определяемый
пункт.
По схеме выбираем два наилучших варианта решения засечки путем сравнения
площадей специально построенных инверсионных треугольников.
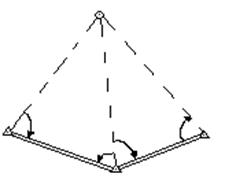
Рисунок 1 - Схема прямой многократной засечки
Далее решаем два выбранных варианта засечки, используя формулы Юнга;
расхождения координат, полученных в двух вариантах, с учетом точности измерений
допускается до 0,2 м. При допустимом расхождении за окончательные значения
координат принимаем средние их значения двух вариантов.
Производим оценку точности полученных координат.
Порядок выполнения:
. Чертим координатную сетку и оцифровываем ее в масштабе 1:10000 с учетом
координат исходных пунктов. Наносим по координатам пункты А, В, С и по углам, с
помощью геодезического транспортира, пункт Р.
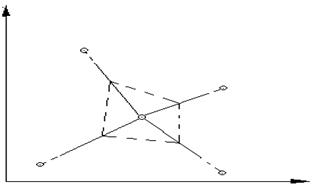
. Для определения лучших вариантов засечки на схеме (рис. 2 ) строим
инверсионные треугольники: от пункта Р по направлениям РА, РВ, РС откладываем
отрезки ri, длину которых вычисляем по формуле
:
 (2)
(2)
где
С - постоянное произвольное число, выбранное с таким расчетом, чтобы значения
величины r были порядка 1 - 3 см (С ≈ 10 см );
Si - расстояние
от определяемого пункта до исходного, измеренное по схеме в сантиметрах.
S1 = АР = 6,9 см= ВР = 10,1 см3
= СР = 4,9 см
Находим
обратные соотношения
Рисунок
2 - Схема построения инверсионных треугольников
Вершинами
инверсионных треугольников для каждого варианта засечки будут являться пункт Р
и конечные точки соответствующих отрезков ri .
Лучшими
вариантами засечки считаются те, у которых наибольшие площади инверсионных
треугольников (определяем визуально).
Для
решения вариантов засечки используем следующие формулы Юнга:
 (3)
(3)
 (4)
(4)
где
X1, Y1, X2, Y2 - координаты исходных пунктов, α, β -
горизонтальные углы, измеренные на
исходных пунктах.
В
формулах (3), (4) обозначения соответствуют схеме, приведенной на рис.3, при
вычислении координат по второму варианту засечки применяем те же обозначения.
Рисунок
3 - Схема к вычислениям прямой засечки
Согласно
варианту, используя формулы Юнга, вычисляем координаты определяемого пункта Р,
считая исходными пунктами сначала пункты А и В, а затем В и С. Расчеты сводим в
таблицу 2.
Таблица
2 - Пример вычисления вариантов прямой засечки
|
Название пунктов
|
Углы
|
Х, м
|
ctg ß, ctgα
|
У, м
|
|
точек
|
углов
|
|
|
|
|
|
1 2
|
α
β
|
89° 26' 20'' 42° 34' 20''
|
5807,55 5108,04
|
0,009794 1,088551
|
2657,09 2406,60
|
|
1 2
|
α
β
|
30° 23' 08'' 90°
33' 39''
|
5108,04 5068,24
|
1,705444 -0,009789
|
2406,60 3263,33
|
Вычисляем координаты пункта Р.




Далее
вычисляем среднее значение координат точки Р.
 (5)
(5)
 (6)
(6)


Расхождение
между первыми и вторыми значениями координат может быть только из-за влияния
погрешностей округления. Получили средние значения координат  = 3291,74 м и Хр = 5573,255 м.
= 3291,74 м и Хр = 5573,255 м.
1.3 Оценка ожидаемой точности полученных результатов
Определяем среднюю квадратическую ошибку mp положения точки Р для каждого варианта засечки по формуле
 (7)
(7)
где
mβ - средняя квадратическая ошибка измерения углов (mβ = 10˝);
γ - угол в треугольнике при точке Р (рис.3)
γ = 180° - (α + β) (8)
S1, S2 -
стороны засечки, м (определяем по схеме);
Значение
ρ принимаем в секундах (ρ = 206265˝);
Первый
треугольник
γ = 47° 59' 20''
S1 = 6,75 см =
675 м;
S2 = 10,1 см =
1010 м;
 м
м
Второй
треугольник γ = 59° 03' 13''= 10,1 см =
1010 м;= 5 см = 500 м;
 м
м
Находим
среднюю квадратическую ошибку координат, полученных из двух вариантов засечки,
по формуле:
 (9)
(9)
 м
м
Таким
образом вычислили координаты дополнительного пункта Р, определенного прямой
многократной засечкой, которые равны: Х = 5573,255м и Y = 3291,75м.
Они входят в допуск.
Для
этого составили схему расположения исходных и определяемого пунктов - А, В, С и
Р (рис.1). По схеме выбрали два наилучших варианта решения засечки путём
сравнения площадей специально построенных инверсионных треугольников.
Использовав формулы Юнга, решили выбранные варианты засечки, определили координаты
точки Р. Полученное расхождение координат в допуске и поэтому за окончательные
значения координат приняли их средние значения. Далее произвели оценку точности
полученных координат и получили  = 0,05м.
= 0,05м.
В
данной задаче произвели необходимые вычисления и получили не плохие результаты.
2.
ВЫЧИСЛЕНИЕ КООРДИНАТ ДОПОЛНИТЕЛЬНОГО ПУНКТА, ОПРЕДЕЛЕННОГО ОБРАТНОЙ
МНОГОКРАТНОЙ ЗАСЕЧКОЙ
.1
Сущность задачи и исходные данные
Задача
обратной засечки заключается в определении координат четвертого пункта по
координатам трех исходных пунктов и двум углам, измеренным при определяемом
пункте (рис.4).
Для
контроля правильности решения задачи при определяемом пункте измеряем третий
угол между направлениями на один из первых пунктов и на четвертый пункт
исходной сети.
Таким
образом, для решения задачи с контролем необходимо видеть из определяемого
пункта четыре пункта исходной сети и измерить три угла при определяемом пункте.
Рисунок
4 - Схема обратной многократной засечки
Таблица
3 - Исходные данные для решения обратной засечки
|
№
|
Координаты
|
Измеренные на пункте Р
направления
|
|
Х, м
|
У, м
|
|
|
1 2 3 4
|
7104,51+0,20 № = 7107,31
6613,06 +0,20 № = 6615,86 6652,86 + 0,20 № = 6655,68 7352,37 + 0,20 № =
7355,17
|
3851,55 3816,43 2959,70
3210,20
|
0°00'00''
59°00'48''+1'27''№=59°21'06'' 177°56'47'' 273°21'38''
|
№ - индивидуальный номер студента, в данной курсовой работе - №14.
.2 Порядок решения и выполнения обратной многократной засечки
Порядок решения:
Составляем схему (рис.4) расположения определяемого и исходных пунктов,
используя известные координаты и углы.
По схеме выбираем два наилучших варианта решения засечки путем сравнения
площадей инверсионных треугольников.
Решаем два выбранных варианта засечки. Расхождение координат, полученных
в двух вариантах, с учетом точности измерений допускается до 0,4м. При
допустимом расхождении за окончательные значения координат принимаем их средние
значения из двух вариантов.
Производим оценку точности полученных координат определяемого пункта Р.
Порядок выполнения:
. Чертим координатную сетку и оцифровываем ее в масштабе 1:10000 с учетом
координат исходных пунктов. Наносим по координатам пункты А, В, С, D и по способу Болотова (направлениям)
- пункт Р (приложение 2).
.Если число исходных пунктов (направлений) в обратной засечке больше
трех, то выбираем лучшие варианты ее решения из числа вариантов, рассчитываемых
по формуле:
 (10)
(10)
где
n - число направлений.
Выбор
лучших вариантов засечки производим так же, как в прямой засечке по площадям
инверсионных треугольников, но вершинами в них будут только конечные точки
отрезков ri (рис.5).
 (11)
(11)
где
С - постоянное произвольное число, выбранное с таким расчетом, чтобы значения
величины r были порядка 1 - 3 см (С ≈ 10 см );
S - расстояние
от определяемого пункта до исходного, измеренное по схеме в сантиметрах.
 ;
;
 ;
;
 ;
;
 .
.
Рисунок
5 - Схема построения инверсионных треугольников при выборе вариантов решения
обратной засечки
Обратная
угловая засечка имеет множество способов решения. Для решения данной задачи
сначала определяем дирекционный угол одного из направлений АР, принятого в
качестве главного, по формуле Даламбера
 (12)
(12)
Затем
определяем дирекционный угол следующего направления:
 (13)
(13)
После
того, как определили дирекционные углы направлений АР и ВР вычисляем координаты
определяемой точки по формулам Гаусса
 (14)
(14)
 (15)
(15)
Чтобы
проконтролировать вычисления, мы второй раз находим ординату определяемой точки
по формуле
 (16)
(16)
Для
реализации формул (12-16) используем схему на рис.6.
Рисунок 6 - Схема обозначений к вычислениям
Далее решаем два наилучших варианта засечки, используя исходные данные и
формулы. Вычисления производим по схеме, приведенной в табл. 4. Свои данные
заносим в табл. 5.
Сначала рассмотрим первый вариант вычисления обратной угловой засечки
(табл. 5 - первый треугольник), а затем второй (табл. 5 - второй треугольник).
После всех вычислений сравним полученные данные.
Таблица 4 - Схема для вычисления обратной угловой засечки
Если расхождения в двух вариантах засечки не превысят 0,02 м (с учетом
точности исходных данных), то за окончательные значения координат принимаем их
средние значения.
Таблица 5 - Вычисление обратной угловой засечки
|
Обозначение пункта
|
Координаты
|
Решение
|
|
|
-
|
-247,86
|
-
|
641,35
|
|
A(3)
|
6655,66
|
2959,7
|
62°07'01"
|
-
|
1,890026452
|
-
|
|
|
|
95°24'51"
|
699,51
|
-0,094777
|
250,5
|
|
B(4)
|
7355,17
|
3210,2
|
157°32'52"
|
-
|
-0,413577551
|
-
|
|
C(1)
|
7107,31
|
3851,55
|
182°03'13"
|
-451,65
|
27,888066
|
-891,85
|
|
|
|
-
|
∑=0
|
-
|
∑=0
|
|
Р
|
6889,99
|
3402,59
|
3402,59
|
-13303,29
|
2,303604003
|
-25143,57
|
Второй треугольник ∆234,
|
Обозначение пункта
|
Координаты
|
Решение
|
|
|
-
|
699,51
|
-
|
250,5
|
|
A(2)
|
6615,86
|
3816,43
|
-56°28'42"
|
-
|
-1,509598655
|
-
|
|
|
|
118°35'41"
|
39,8
|
-0,545098208
|
-856,73
|
|
B(3)
|
6655,66
|
2959,7
|
62°07'00"
|
-
|
-1,890000582
|
-
|
|
C(4)
|
7355,17
|
3210,2
|
214°00'32"
|
-739,31
|
1,482064946
|
606,23
|
|
|
|
-
|
∑=0
|
-
|
∑=0
|
|
Р
|
6889,99
|
3402,60
|
3402,58
|
-1367,9
|
-3,399599237
|
2064,98
|
β2 =РВ - РА; (17)
β3 =РС - РА;
Первый треугольник
β2 = 273°21'38'' - 177°56'47'' =
95°24'51''
β3 =360° - 177°56'47'' = 182°03'13''

 =
62°07'01"
=
62°07'01"
 =
157°32'52"
=
157°32'52"



β2 = 177°56'47'' - 59°21'06'' = 118°35'41"
β3 =273°21'38'' - 59°21'06'' = 214°00'32"

=
-56°28'42"
=
62°07'00"



Вычислив
по двум вариантам координаты точки Р и убедившись, что они в допуске, за
окончательные значения координат точки Р берем среднее полученных значение. В
результате получили: Хр = 6889,99 м и Ур = 3402,595 м.
.3
Оценка ожидаемой точности полученных результатов
Определяем
среднюю квадратическую ошибку mp положения точки Р для каждого варианта засечки по
формуле
 (18)
(18)
где
mp - средняя квадратическая ошибка положения
определяемого пункта;
mβ - средняя квадратическая ошибка измерения углов (mβ = 10˝);
φ = < PCB, ψ = < PAB - углы,
измеряемые транспортиром по схеме;
S - расстояния,
измеренные по схеме, м;
ρ = 206265˝;
Первый
треугольник
φ = < PCB = 42°03'
00" ,
ψ = < PAB=42°00'00"
SАВ = 7,45см =
745 м;
SСР = 5 см = 500
м;
SСВ = 6,85см =
685 м
SАР = 5,10 см =
510 м

Второй
треугольник
φ = < PCB = 59°30'
00" ,
ψ = < PAB=48°33'00"
SАВ = 9,50см =
950 м;
SСР = 5,10 см =
510 м;
SСВ = 7,45см =
745 м
SАР = 4,90 см =
490 м

Находим
среднюю квадратическую ошибку координат, полученных из двух вариантов засечки,
по формуле:
(9)

Таким
образом вычислили координаты дополнительного пункта Р, определенного обратной
многократной засечкой, которые равны: Х = 6889,99м и Y = 3402,59 м.
Они входят в допуск.
В
данной задаче определили координаты пункта Р по координатам исходных пунктов и
двум углам, решив задачу двумя вариантами. Произвели контроль правильности
решения задачи при определяемом пункте - измерили третий угол между
направлениями. Далее вычислили оценку точности полученных результатов и получили
= 0,05 м. Поставленной цели в данной задаче добились,
задача выполнена.
3.
УРАВНИВАНИЕ ХОДОВ ПОЛИГОНОМЕТРИИ 2-ГО РАЗРЯДА, ОБРАЗУЮЩИХ ОДНУ УЗЛОВУЮ ТОЧКУ
.1
Сущность задачи
В
данной задаче теодолитные ходы уравниваем упрощенно: вначале уравнивают углы,
затем вычисляем и уравниваем приращения координат, считая их независимыми с
весами.
Для
полигонометрических ходов, представленных на рис. 7, приведены исходные данные
в таблицах 6 и 7.
Рисунок
7 - Схема ходов полигонометрии 2-го разряда.
.2
Вычисление координат исходных пунктов и дирекционных углов исходных направлений
По
данным, приведенным в табл. 6, вычисляем координаты всех исходных пунктов и дирекционных
углов исходных направлений
Вычисляем
координаты всех исходных пунктов и дирекционных углов исходных направлений,
данные сводим в табл.6.
Дирекционные
углы исходных направлений ВС и АС вычисляем по формуле:
 (19)
(19)
Приращение
координат вычисляем по формулам:

 (20)
(20)
Затем
определяем координаты исходных пунктов В и С используя формулы:
 (21)
(21)
Дирекционные
углы:
ВС:
144°27΄43˝+180°-
103°52΄34˝ = 220°35΄09˝
СА:
220°35΄09˝+180°-32°12΄31˝
= 368°22΄38 - 360° = 8°22΄38;
Контроль:
АВ: 8°22΄38
+180°- 43°54΄55˝ = 144°27΄43˝
Приращения:
∆Х:
АВ:
3301,47 ∙ cos144°27΄43˝=
3301,47 ∙ (-0,813729639) = -2686,50м
ВС:
4296,16 ∙ cos220°35΄09˝=
4296,16 ∙ (-0,759432191) = -3262,64м
СА:
6013,30 ∙ cos8°22΄38˝=
6013,30 ∙ 0,989330329 = 5949,14м
∆Y:
АВ:
3301,47 ∙ sin144°27΄43˝=
3301,47 ∙ 0,581243558 =1918,96 м
ВС:
4296,16 ∙ sin220°35΄09˝=
4296,16 ∙ (-0,650586463) = -2795,02м
СА:
6013,30 ∙ sin8°22΄38˝=
6013,30 ∙ 0,147226096 = 876,07м
Координаты
исходных пунктов В и С:
Х:
В:
2349587,73 + (-2686,50) = 2346901,23м
С:
2346901,23 + (-3262,64) = 2343638,59м
Контроль:
А: 2343638,59 +5949,14 =2349587,73 м
Y:
В:
9575478,12 + 1918,96 = 9577397,08м
С:
9577397,08 + (-2795,02) = 9574602,05м
Контроль:
9574602,05 + 876,08 = 9575478,12 м
Таблица 6 Данные по исходным пунктам
|
№ пункта
|
Углы
|
Дирекционные углы
|
Стороны, м
|
Приращения координат, м
|
Координаты, м
|
|
|
|
|
|
∆Χ
|
∆Υ
|
Χ
|
Υ
|
|
|
А
|
43°54'55"
|
|
|
|
|
2324446,33 +∆х=2349587,73
|
9450336,72 + ∆у =
9575478,12
|
|
|
|
119°13'29" + ∆ α
=144°27'43"
|
3301,47
|
-2686,50
|
1918,96
|
|
|
|
|
В
|
103°52'34"
|
|
|
|
-0,01
|
2346901,23
|
9577397,08
|
|
|
|
220°35'09"
|
4296,16
|
-3262,64
|
-2795,02
|
|
|
|
|
С
|
32°12'31"
|
|
|
|
-0,01
|
2343638,59
|
9574602,05
|
|
|
|
8°22'38"
|
6013,30
|
5949,14
|
876,08
|
|
|
|
|
А
|
|
|
|
|
|
2349587,73
|
9575478,12
|
|
|
|
|
|
∑=0
|
∑=0,02
|
|
|
|
|
|
|
|
|
|
|
|
|
В табл. 7. - ∆α = 1° № гр. + 1'01" №
∆α = 1°∙ 25. +
1'01" ∙ 14 = 25°14'14"
∆у = ∆х = 1000 м ∙№ гр.+ 10,10 № = 1000м ∙ 25 +
14,14 = 25141,4 м
№ гр. - номер группы, № - индивидуальный номер студента 3.3.Вычисление и
уравнивание дирекционного угла узловой стороны.
Уравнивание углов начинаем с выбора узловой линии, в качестве которой
может быть принята любая сторона хода, примыкающая к узловой точке. В нашем
случае за узловую линию мы принимаем линию 6-7.
Таблица 7 - Вычисления при уравнивании дирекционного угла узловой стороны
|
№
|
Кол-во углов, n
|
Вес хода, Pi
= c/n
|
Сумма измеренных углов, ∑
β
|
Исходный дирекционный угол,
αисх
|
Дирекционный угол узловой
стороны, αi
|
∆αi Pi
|
fβ
|
fдоп
|
|
1
|
7
|
1,429
|
1385°12'10"
|
324°27'43"
|
199°15'33"
|
47,157"
|
03"
|
53"
|
|
2
|
6
|
1,667
|
1025°12'08"
|
144°27'43"
|
199°15'35"
|
58,345"
|
05"
|
49"
|
|
3
|
7
|
1,429
|
1101°19'47"
|
220°35'09"
|
199°15'22"
|
31,438"
|
-08"
|
53"
|
Для этой линии, идя от исходных дирекционных углов, находим значения
дирекционного угла по каждому ходу
 , (22)
, (22)
где
n - количество углов, входящих в сумму  .
.
Затем
определяем веса значений  по формуле
по формуле
 , (23)
, (23)
где
с - постоянное число ( с = 10 ), n - количество ходов.
После
этого находим вероятнейшее значение дирекционного угла узловой линии по данным
всех ходов по формуле
 , (24)
, (24)
где
 ,
,  -
приближенное значение
-
приближенное значение  .
.
Далее
вычисляем угловые невязки ходов fβ
β =  , (25)
, (25)
и
являются ли они в допуске по формуле
доп
= 20" , (26)
, (26)
Выяснив,
что все невязки являются допустимыми, распределяем их с противоположным знаком
в соответствующих ходах поровну на каждый угол.
 =
324°27'43" + 180° ∙ 7 - 1383°12'10" = 199°15'33"
=
324°27'43" + 180° ∙ 7 - 1383°12'10" = 199°15'33"
=
144°27'43" + 180° ∙ 6 - 1025°12'08" = 199°15'35"
=
220°35'09" + 180° ∙ 7 - 1101°19'47" = 379°15'22" =
199°15'22"
 ;
;  ;
;  .
.
=
199°15'00"
 =
199°15'33" - 199°15'00" = 33"
=
199°15'33" - 199°15'00" = 33"
 =
199°15'35" - 199°15'00" = 35"
=
199°15'35" - 199°15'00" = 35"
 =
199°15'22" - 199°15'00" = 22"
=
199°15'22" - 199°15'00" = 22"
 =
199°15'00" + (2'16" / 4,525) = 199°15'30"β = 199°15'33" - 199°15'30" = 3" β = 199°15'35" - 199°15'30" = 5" β = 199°15'22" - 199°15'30" = -8" доп 1
= 20"
=
199°15'00" + (2'16" / 4,525) = 199°15'30"β = 199°15'33" - 199°15'30" = 3" β = 199°15'35" - 199°15'30" = 5" β = 199°15'22" - 199°15'30" = -8" доп 1
= 20" = 53"
= 53"
fдоп
2 = 20" = 49" доп 3 = 20"= 53"
= 49" доп 3 = 20"= 53"
Данные
сводим в таблицы 7 и 8.
3.4 Вычисление и уравнивание координат узловой стороны
По вычисленным дирекционным углам и длинам сторон вычисляем приращения
координат и их суммы по ходам по формулам (20)
Уравнивание
приращений координат производим так же, как и уравнивание углов. Идя от
исходных пунктов, вычисляем координаты узловой точки 6 по каждому ходу. В нашем
случае
 (27)
(27)
Затем
вычисляем веса для значений координат узловой точки по каждому ходу по формуле
 (28)
(28)
где
 - длина хода.
- длина хода.
После
этого находим вероятнейшие значения координат ХВ и УВ узловой точки
6 по формулам
 (29)
(29)
Далее
по этим координатам вычисляем невязки в приращениях по каждому ходу

 (30)
(30)
Все
вычисления производим в табл.9. Полученные невязки распределяем с
противоположным знаком на приращения в каждом ходе пропорционально длинам
сторон в табл. 8.






 ;
;
 ;
; 








Уравняв
приращения, вычисляем координаты всех вершин углов теодолитных ходов.
Вычисления выполняем в табл.8.
В
этом задании выполнили уравнивание системы ходов упрощённым способом:-
вычислили координаты всех исходных пунктов и дирекционных углов исходных направлений,
приращения координат;
вычислили
сумму измеренных углов и дирекционный угол узловой линии по каждому ходу, нашли
вероятнейшее значение дирекционного угла узловой линии по данным всех ходов;
вычислила
по уравненным углам дирекционные углы и приращения координат для сторон ходов,
координаты узловой точки, нашли вероятнейшее значение Х и У узловой точки;
вычислили
относительные невязки по каждому ходу и сравнили их с допустимыми; распределили
невязки, введя поправки в приращения координат пропорционально длинам сторон;
вычислила
координаты всех точек ходов по уравненным приращениям координат.
Таблица 8 - Вычисления при уравнивании ходов полигонометрии 2-го разряда
Первый ход
|
№
|
Углы
|
Дирекционные углы
|
Стороны, м
|
Приращения координат, м
|
Координаты, м
|
|
|
|
|
Полученные
|
Исправленные
|
|
|
Измеренные
|
Исправленные
|
|
|
∆Х
|
∆У
|
∆Х
|
∆У
|
Х
|
У
|
|
В
|
|
|
|
|
|
|
|
|
|
|
|
+01"
|
|
324°27'43"
|
|
|
|
|
|
|
|
|
А
|
315°07'35"
|
315°07'36"
|
|
|
+0,016
|
-0,001
|
|
|
2349587,73
|
9575478,12
|
|
|
|
189°20'07"
|
497,140
|
-490,556
|
-80,642
|
-490,54
|
-80,643
|
|
|
|
1
|
180°56'35"
|
180°56'35"
|
|
|
+0,016
|
-0,01
|
|
|
2349097,19
|
9575397,477
|
|
+01"
|
|
188°23'32"
|
502,751
|
-497,368
|
-73,376
|
-497,352
|
-73,377
|
|
|
|
2
|
179°04'17"
|
179°04'18"
|
|
|
+0,016
|
|
|
|
2348599,838
|
9575324,1
|
|
|
|
189°19'14"
|
500,857
|
-494,245
|
-81,118
|
-494,229
|
-81,118
|
|
|
|
3
|
180°13'31"
|
180°13'31"
|
|
|
+0,016
|
|
|
|
2348105,609
|
9575242,982
|
|
+01"
|
|
189°05'43"
|
511,387
|
-504,957
|
-80,838
|
-504,941
|
-80,838
|
|
|
|
4
|
180°25'45"
|
180°25'46"
|
|
|
+0,016
|
|
|
|
2347600,668
|
9575162,144
|
|
|
|
188°39'57"
|
478,306
|
-472,846
|
-72,067
|
-472,83
|
-72,067
|
|
|
|
5
|
180°00'43"
|
180°00'43"
|
|
|
+0,016
|
|
|
|
2347127,838
|
9575090,077
|
|
|
|
188°39'14"
|
511,497
|
-505,673
|
-76,963
|
505,657
|
-76,963
|
|
|
|
6
|
169°23'44"
|
169°23'44"
|
|
|
|
|
|
|
2346622,181
|
9575013,114
|
|
∑=1385°12'10
|
|
199°15'30"
|
∑=3001,938
|
∑=2965,645
|
∑=465,004
|
|
|
|
|
Второй ход
|
А
|
|
|
|
|
|
|
|
|
|
|
|
+01"
|
|
144°27'43"
|
|
|
|
|
|
|
|
|
В
|
66°49'31"
|
66°49'32"
|
|
|
-0,024
|
-0,009
|
|
|
2346901,226
|
9577397,078
|
|
|
|
257°38'11"
|
512,727
|
-109,783
|
-500,836
|
-109,807
|
-500,845
|
|
|
|
13
|
180°00'17"
|
180°00'17"
|
|
|
-0,024
|
-0,009
|
|
|
2346791,419
|
9576896,233
|
|
+01"
|
|
257°37'54"
|
508,706
|
-496,899
|
-108,787
|
-496,908
|
|
|
|
14
|
179°54'41"
|
179°54'42"
|
|
|
-0,024
|
-0,009
|
|
|
2346682,632
|
9576399,325
|
|
+01"
|
|
257°38'12"
|
521,445
|
-111,647
|
-509,352
|
-111,671
|
-508,361
|
|
|
|
15
|
180°00'03"
|
180°00'04"
|
|
|
-0,024
|
-0,009
|
|
|
2346570,961
|
9575889,964
|
|
+01"
|
|
257°38'08"
|
427,178
|
-91,471
|
-417,270
|
-91,495
|
-417,279
|
|
|
|
16
|
150°22'50"
|
150°22'51"
|
|
|
-0,024
|
-0,009
|
|
|
2346479,466
|
9575472,685
|
|
+01"
|
|
287°15'17"
|
481,219
|
142,739
|
-459,562
|
142,715
|
-459,571
|
|
|
|
6
|
267°59'46"
|
267°59'47"
|
|
|
|
|
|
|
2346622,181
|
9575013,114
|
|
|
|
199°15'30"
|
|
|
|
|
|
|
|
|
7
|
|
|
|
|
|
|
|
|
|
|
|
∑=1025°12'08
|
|
|
∑=2451,275
|
∑= -278,925
|
∑=-2383,919
|
|
|
|
|
Третий ход
|
В
|
|
|
|
|
|
|
|
|
|
|
|
-01"
|
|
220°35'09"
|
|
+0,004
|
+0,001
|
|
|
|
|
|
С
|
27°23'02"
|
27°23'01"
|
|
504,716
|
491,376
|
115,271
|
491,38
|
115,272
|
2343638,584
|
9574602,054
|
|
-01"
|
|
13°12'08"
|
|
+0,01
|
+0,01
|
|
|
|
|
|
12
|
180°07'36"
|
180°07'35"
|
|
506,800
|
493,659
|
114,659
|
493,669
|
114,669
|
2344129,964
|
9574717,326
|
|
-01"
|
|
13°04'33"
|
|
+0,01
|
+0,01
|
|
|
|
|
|
11
|
179°55'48"
|
179°55'47"
|
|
497,121
|
484,093
|
113,063
|
484,103
|
113,073
|
2344623,633
|
9574831,995
|
|
-01"
|
|
13°08'46"
|
|
+0,01
|
+0,01
|
|
|
|
|
|
10
|
180°01'20"
|
180°01'19"
|
|
454,503
|
442,632
|
103,200
|
442,642
|
103,210
|
2345107,736
|
9574945,068
|
|
-01"
|
|
13°07'27"
|
|
+0,01
|
+0,01
|
|
|
|
|
|
9
|
202°28'31"
|
202°28'30"
|
|
411,747
|
406,276
|
-66,900
|
406,286
|
-66,890
|
2345550,378
|
9575048,278
|
|
-02"
|
|
-9°21'03"
|
|
+0,01
|
+0,01
|
|
|
|
|
|
8
|
183°44'42"
|
183°44'42"
|
|
354,236
|
345,024
|
-80,260
|
345,034
|
-80,250
|
2345956,664
|
9574981,388
|
|
-01"
|
|
-13°05'43"
|
|
+0,01
|
+0,01
|
|
|
|
|
|
7
|
147°38'48"
|
147°38'47"
|
|
339,469
|
320,473
|
111,966
|
320,483
|
111,976
|
2346301,698
|
9574901,138
|
|
|
|
19°15'30"
|
|
|
|
|
|
|
|
|
6
|
|
|
|
|
|
|
|
|
2346622,181
|
9575013,114
|
|
∑=1101°19'47
|
|
|
∑=3068,592
|
∑=2983,533
|
∑=410,999
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 9 - Вычисления при уравнивании координат узловой точки
|
№
|
Периметр хода [Si],
м
|
Вес хода Pi =c/[Si]
|
Сумма приращений по ходу, м
|
Координаты узловой точки, м
|
Невязки по ходам, м
|
|
|
|
∑∆Χ
|
∑∆Υ
|
Χ
|
Υ
|
δ
Χi
|
δΥi
|
δΧΥi
|
δΧΥi/[Si]
|
|
|
|
|
|
|
|
|
|
|
|
|
1
|
3001.938
|
0,003
|
-2965,645
|
-465,004
|
2346622,085
|
9575013,116
|
-0,096
|
0,002
|
-0,0002
|
1/15009690
|
|
|
|
|
|
|
|
|
|
|
|
|
2
|
2451.275
|
0.004
|
-278,925
|
-2383,919
|
2346622,301
|
9575013,159
|
+0,12
|
0,045
|
+0,005
|
1/490255
|
|
|
|
|
|
|
|
|
|
|
|
|
3
|
3068.592
|
0.003
|
2983,533
|
410,999
|
2346622,117
|
9575013,053
|
-0,064
|
-0,061
|
+0,004
|
1/767148
|
|
|
|
|
|
|
|
|
|
|
|
4. УРАВНИВАНИЕ ХОДОВ ТЕХНИЧЕСКОГО НИВЕЛИРОВАНИЯ СПОСОБОМ
ПОЛИГОНОВ ПРОФЕССОРА В.В. ПОПОВА
.1 Сущность задачи и исходные данные
Способ полигонов профессора В.В. Попова применяется для уравнивания как
свободной, так и несвободной сети полигонов. Для нивелирной сети этот способ
является строгим, т.е. дает такие же результаты, как и метод наименьших
квадратов.
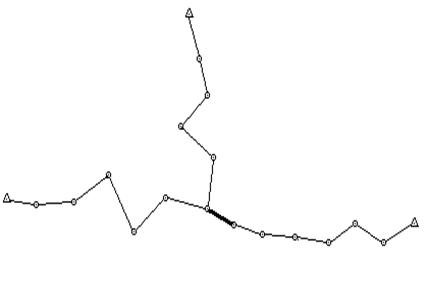
Перед уравниванием вычерчиваем схему нивелирной сети, состоящую из
четырех полигонов (рис. 8). Между реперами прокладываем два фиктивных хода
пунктирной линией. На схему по ходам и полигонам (фактическим и фиктивным)
выписываем измеренные превышения hi по
каждому звену ходу, связывающему две соседние узловые точки, длины звеньев Li, число станций ni в каждом звене и реперы (HRpI=106,943 м, HRpII=100,132 м).
Затем подсчитываем невязки в превышениях по каждому полигону,
соответствующие обходу полигона по направлению часовой стрелки. Результаты
выписываем на чертеже (рис.8) сети.
Контролем правильности вычисления невязок является условие
 =0 (31)
=0 (31)
Вычисленные
невязки сравниваем с допустимыми. Допустимую невязку  (мм) вычисляем по формуле:
(мм) вычисляем по формуле:
 (32)
(32)
где
L - периметр полигона, км.
Длина
хода:
 (33)
(33)
где
∆l - для 25 гр. вычисляем по формуле
∆l = 
№
- индивидуальный номер студента
Высота
исходных реперов:
H Rp I = 106, 985 м - 3 мм ∙№
H Rp II = 100, 132 м
По
этим формулам вычислили всё необходимое для дальнейшей работы. Все данные
занесли в таблицу 10, затем, используя дальнейшие вычисления, до конца
заполнили таблицу.
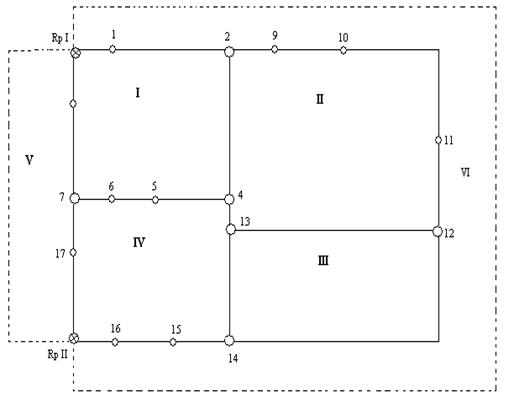
Рисунок
8 - Схема нивелирной сети.
Контроль:
= (- 0,042) + (-0,074) + 0,022 + 0,016 + (-0,042) +
0,120 = 0
∆l = = +0,2км ∙ 14 = 2,8 км
L1 = 4 + 2,8 = 6,8 км L6 = 4,2 + 2,8 = 7 км
L2 = 6,3 + 2,8 = 9,1 км L7 = 4,0 + 2,8 = 6,8 км
L3 = 5,5 + 2,8 = 8,3 км 4 L8 = 6,6 + 2,8 = 9,4 км
L4 = 6,2 + 2,8 = 9 км LRpI
= 5,3 + 2,8 = 8,1 км
L5 = 4,5 + 2,8 = 7,3 км
L9 = 7,0 + 2,8 = 9,8 км 9 L13=6,3 +2,8= 9,1 км
L10 = 5,9 + 2,8 = 8,7 км 10 L15 = 4,6 + 2,8 = 7,4 км
L11 = 5,7 + 2,8 = 8,5 км L16 = 4,8 + 2,8 = 7,6 км
L12 = 6,0 + 2,8 = 8,8 км LRpII = 5,7 +
2,8 = 8,5 км
L13 = 6,2 + 2,8 = 9 км 11 L17 = 6,0 + 2,8 = 8,8 км
L4 = 4,9 + 2,8 = 7,7 км L7 = 6,0 + 2,8 = 8,8 км
L14 = 9,8 + 2,8 = 12,6 км
Допустимые
невязки:
I  мм IV
мм IV  мм
мм
II  мм V
мм V  мм
мм
III  мм VI
мм VI
 ммRp I = 106, 985 м - 3
мм ∙ 25 = 106,943 м Rp II = 100, 132 м
ммRp I = 106, 985 м - 3
мм ∙ 25 = 106,943 м Rp II = 100, 132 м
Подсчитали
невязки в превышениях по каждому полигону, соответствующие обходу полигона по
направлению часовой стрелки, и их наибольшие по абсолютной величине допустимые
значения. Для каждой стороны полигонов выписали на чертёж (рис. 8) превышения и
их соответствующую длину, а затем подсчитанные для каждого полигона периметр,
сумму превышений и допустимую невязку. Контроль правильности вычисления невязок
выполняется т. е. [fh]=0. Результаты вычислений записали на чертеже сети.
4.2
Уравнивание превышений по способу полигонов профессора В.В. Попова
засечка
узловой нивелирование полигон
Убедившись, что невязки в допуске, переходим к уравниванию сети. Для
уравнивания сети, вычерчиваем схему независимых нивелирных полигонов, т.е. всех
фактических и фиктивных (кроме VI).
На этой схеме примерно в центре каждого полигона строим рамочки, над
которыми римскими цифрами пишем номера полигонов, а внутри рамочек записываем
невязки. Затем вне каждого полигона у каждого его звена строим рамочки для
записи поправок. Таким образом, у внешних звеньев сети будет по одной рамочке,
а у внутренних - по две (по одной с каждой стороны звена).
Для каждого звена полигона вычисляем «красные числа» ri и записываем над соответствующими
рамочками. «Красным числом» - отношение числа станций в звене к числу станций
во всем полигоне.
 (34)
(34)
где
 - длина хода в полигоне, км;
- длина хода в полигоне, км;
 -
периметр полигона, км.
-
периметр полигона, км.
Например,
для II полигона 
Сумма
«красных чисел» для каждого полигона должна быть равна единице:  +
+  +
+  +
+  = 0,51
+, 013 + 0,11 + 0,25 = 1.
= 0,51
+, 013 + 0,11 + 0,25 = 1.
Затем
приступаем к распределению невязок пропорционально красным числам
соответствующих полигонов. Начинаем с полигона, имеющего большую невязку. Это
распределение невязок производим непосредственно на схеме нивелирной сети.
Умножив
невязку второго полигона II (т.к. полигон имеет наибольшую по модулю невязку -
74) на его красные числа, полученные произведения, сумма которых должна быть
равна распределяемой невязке: -38 +(-10)+(-8)+(-18)= -74, записываем в
соответствующих данному полигону рамочках. Распределенную невязку подчеркиваем.
При распределении невязок в последующих полигонах учитываем поправки, пришедшие
из соседних полигонов.
При
переходе к полигону III значение невязки изменится на величину поправки,
перешедшей из полигона II (22 + (-10) = 12). Учтенную поправку подчеркиваем.
Новую невязку распределяем пропорционально красным числам этого полигона и
полученные произведения записываем во внешних к полигону рамочках,
распределенную невязку подчеркиваем. И так считаем невязки для III, IV и V
полигонов.
Закончив
распределения невязок во всех полигонах, возвращаемся к полигону II.
Здесь появится новая невязка, которую распределяем так же, как и первый раз.
Таким
образом, закончив первый цикл распределения невязок, приступаем ко второму,
затем к третьему и так далее до тех пор, пока все невязки полигонов станут
равными нулю.
Во
избежание повторного использования одной и той же величины в процессе
распределения невязок каждое использованное значение сразу же подчеркиваем.
После
того, как все невязки будут распределены, подсчитываем сумму чисел во всех
табличках у звеньев. Чтобы получить поправки на звенья, внешние суммы полигона
переносим внутрь полигона с противоположенным знаком и складываются с его
внутренними суммами для тех же звеньев. Полученные поправки записываем в
скобках около соответствующих звеньев. У внутренних звеньев сети поправки
записываем по обе стороны звена (соответственно двум смежным полигонам этого
звена).
Контроль:
в каждом полигоне сумма поправок на звенья должна быть равна невязке полигона с
обратным знаком. Например, во II полигоне 59 + 16 + 4 - 5 = 74
.3
Вычисление высот всех точек по ходам, по уравненным превышениям
Вычисляем
уравненные превышения между точками нивелирования и высоты точек по каждому
ходу в таблице 10. Поправки в измеренные превышения находим, распределяя
поправку на ход пропорционально числу станций между точками нивелирования.
.4
Оценка точности полученных результатов
В
данном задании производим оценку точности нивелирования по результатам
уравнивания. Вычисляем среднюю квадратическую ошибку единицы веса по формуле:
 (35)
(35)
где
Р = С / n - вес хода;
С
- постоянное произвольное число;
n - число
станций в ходе ;
V - поправка в
превышения на ход из уравнивания;
N - число ходов;
q - число
узловых точек;
Следующий
шаг - вычисление средней квадратической ошибки измеренного превышения на 1
километр хода по формулам:
 (36)
(36)  (37)
(37)  (38)
(38)
Где
nКМ-число станций на 1 км хода;
Σn - общее число
станций по всем ходам;
ΣLКМ - периметр
всех ходов;
Оценка
точности будет надёжна только в том случае, когда число полигонов не слишком
мало
Таблица
10 - Измеренные величины и результаты уравнивания.
|
№ хода
|
№ точки
|
Длина хода L,
км
|
Число станций n
|
Превышения h,
м
|
Поправки V,
мм
|
Уравненные
|
|
|
|
|
|
|
превышения, м
|
высоты, м
|
|
1
|
Rp I
|
|
|
|
|
|
106,943
|
|
1
|
6,8
|
29
|
-6,979
|
+0,014
|
-3,965
|
102,978
|
|
2
|
9,1
|
35
|
-1,251
|
+0,017
|
-1,234
|
101,744
|
|
|
∑=15,9
|
∑=64
|
∑=-5,23
|
∑=0,031
|
∑=-5,199
|
|
|
2
|
2
|
|
|
|
|
|
|
|
3
|
8,3
|
36
|
-1,098
|
+0,003
|
-1,095
|
100,649
|
|
4
|
9
|
37
|
-2,002
|
+0,003
|
-1,999
|
98,649
|
|
|
∑=17,3
|
∑=73
|
∑=-3,1
|
∑=+0,006
|
∑=-3,094
|
|
|
3
|
4
|
|
|
|
|
|
|
|
5
|
7,3
|
26
|
+8,923
|
+0,007
|
+8,930
|
|
6
|
7
|
28
|
-5,092
|
+0,007
|
-5,085
|
102,494
|
|
7
|
6,8
|
26
|
-0,858
|
+0,007
|
-0,851
|
101,643
|
|
|
∑=21,1
|
∑=80
|
∑=+2,973
|
∑=+0,021
|
∑=+2,994
|
|
|
4
|
7
|
|
|
|
|
|
|
|
8
|
9,4
|
33
|
-1,038
|
-0,008
|
-1,046
|
100,597
|
|
Rp I
|
8,1
|
28
|
+6,353
|
-0,007
|
+6,346
|
106,943
|
|
|
∑=17,5
|
∑=61
|
∑=+5,315
|
∑=-0,015
|
∑=+5,3
|
|
|
5
|
2
|
|
|
|
|
|
101,744
|
|
9
|
9,8
|
41
|
-3,186
|
+0,018
|
-3,168
|
98,756
|
|
10
|
8,7
|
30
|
+7,461
|
+0,013
|
+7,474
|
106,050
|
|
11
|
8,5
|
38
|
+15,587
|
+0,016
|
+15,603
|
121,653
|
|
12
|
8,8
|
28
|
-16,824
|
+0,012
|
-16,812
|
104,841
|
|
|
∑=35,8
|
∑=137
|
∑=+3,038
|
∑=+0,059
|
∑=+3,097
|
|
|
6
|
12
|
|
|
|
|
|
|
|
13
|
9
|
36
|
+7,269
|
+0,016
|
+7,285
|
112,126
|
|
|
∑=9
|
∑=36
|
∑=+7,269
|
∑=+0,016
|
∑=+7,285
|
|
|
7
|
13
|
|
|
|
|
|
|
|
4
|
7,7
|
25
|
-13,481
|
+0,004
|
-13,477
|
98,649
|
|
|
∑=7,7
|
∑=25
|
∑=-13,481
|
∑=+0,004
|
∑=-13,477
|
|
|
8
|
12
|
|
|
|
|
|
104,841
|
|
14
|
12,6
|
54
|
+4,811
|
+0,003
|
+4,814
|
109,655
|
|
|
∑=12,6
|
∑=54
|
∑=4,811
|
∑=+0,003
|
∑=+4,814
|
|
|
9
|
14
|
|
|
|
|
|
|
|
13
|
9,1
|
28
|
+2,480
|
-0,009
|
+2,471
|
112,126
|
|
|
∑=9,1
|
∑=28
|
∑=+2,480
|
∑=-0,009
|
∑=+2,471
|
|
|
10
|
14
|
|
|
|
|
|
109,655
|
|
15
|
7,4
|
29
|
-7,899
|
+0,009
|
-7,890
|
101,765
|
|
16
|
7,6
|
28
|
+3,885
|
+0,008
|
+3,893
|
105,658
|
|
Rp II
|
8,5
|
32
|
-5,536
|
+0,010
|
-5,526
|
100,132
|
|
|
∑=23,5
|
∑=89
|
∑=-9,55
|
∑=+0,027
|
∑=-9,523
|
|
|
11
|
Rp II
|
|
|
|
|
|
|
|
17
|
8,8
|
38
|
+1,066
|
-0,016
|
+1,050
|
101,182
|
|
7
|
8,8
|
25
|
+0,472
|
-0,01
|
+0,461
|
101,643
|
|
|
∑=17,6
|
∑=63
|
∑=+1,538
|
∑=-0,027
|
∑=+1,511
|
|
Далее вычисляем среднюю квадратическую ошибку измеренного превышения на
станции:
 (39)
(39)
Таблица
11 - Схема для вычислений при оценке точности.
|
Обозначение хода
|
L, км
|
n
|
V, мм
|
V2, мм
|
Р
|
PV2
|
|
1
|
15,9
|
64
|
+31
|
961
|
0,15625
|
150,16
|
|
2
|
17,3
|
73
|
+6
|
36
|
0,13699
|
4,93
|
|
3
|
21,1
|
80
|
+21
|
441
|
0,125
|
55,13
|
|
4
|
17,5
|
61
|
-15
|
229
|
0,16393
|
37,54
|
|
5
|
35,8
|
137
|
+59
|
3481
|
0,07299
|
254,08
|
|
6
|
9
|
36
|
+16
|
256
|
0,27778
|
71,11
|
|
7
|
7,7
|
25
|
+4
|
16
|
0,4
|
6,4
|
|
8
|
12,6
|
54
|
+3
|
9
|
0,18519
|
1,67
|
|
9
|
9,1
|
28
|
+9
|
81
|
0,35714
|
28,93
|
|
10
|
23,5
|
89
|
+27
|
729
|
0,11236
|
81,91
|
|
11
|
17,6
|
63
|
-27
|
729
|
0,15873
|
115,71
|
 =710
=710  = 807,57
= 807,57
Веса
ходов:
С=10
Р1=10/64=0,15625
Р7=10/25=0,4
Р2=10/73=0,13699
Р8=10/54=0,18519
Р3=10/80=0,125
Р9=10/28=0,35714
Р4=10/61=0,16393
Р10=10/89=0,11236
Р5=10/137=0,07299
Р11=10/63=0,15873
Р6=10/36=0,27778
Затем
по каждому ходу перемножили вес хода и поправки, возведённые в квадрат. Тем
самым заполнили последнюю графу таблицы.
Средняя
квадратическая ошибка единицы веса:
N=11, q=8. 
Средняя
квадратическая ошибка измеренного превышения на 1 км хода:
;
 ;
; 
Средняя
квадратическая ошибка измеренного превышения на станции:
Получили
значение, которое в допуске.
В
этом задании выполнили уравнивание ходов технического нивелирования способом полигонов
профессора В. В. Попова. Для этого произвели уравнивание превышений по способу
полигонов В. В. Попова, вычислили высоты всех точек по ходам, по уравненным
превышениям, а также определили оценку точности полученных результатов.
Получила результаты, удовлетворяющие всем необходимым допускам.
ЗАКЛЮЧЕНИЕ
В
данной работы я получила знания, необходимые для уравнивания геодезических
сетей сгущения упрощенным способом. Научилась вычислять координаты
дополнительного пункта, определенного прямой и обратной многократными
засечками. Уравняла ходы полигонометрии 2-го разряда, образующих одну узловую
точку, и ходы технического нивелирования способом полигонов профессора
В.В.Попова.
В
курсовой работе мною были освоены и выработаны навыки математической обработки
результатов геодезических измерений в сетях сгущения:- знания методики
выполнения всех расчётов, увязанных с инструктивными допусками;
умения
самостоятельно выполнять все расчёты, включая оценку точности полученных
результатов;
навыки
по камеральной обработке результатов полевых измерений в геодезических сетях
сгущения.
В
данной курсовой работе я вычисляла координаты дополнительного пункта,
производила оценку точности полученных координат и получила не плохие
результаты. Также определяла координаты четвёртого пункта по координатам трёх
исходных пунктов и двум углам, измеренным при определённом пункте, решив двумя
вариантами задачу для определения обратной угловой засечки. В работе я
выполняла уравнивание системы ходов упрощённым способом, разделяя уравнение
углов и координат на два этапа, уравнивание ходов технического нивелирования
способом полигонов профессора В. В. Попова. Получила результаты,
удовлетворяющие всем необходимым допускам. Полученные знания по данному
материалу пригодятся нам, как будущим специалистам, в дальнейшей работе. Они
помогут решить поставленные задачи и получить точные результаты расчетов без
больших затрат.
СПИСОК
ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1.Методика
математической обработки результатов геодезических измерений в сетях сгущения
по дисциплине «Геодезия»/ Н. А. Пархоменко, М. Е. Седышев.- Омск: ФГОУ ВПО
ОмГАУ, 2014.
.Курс лекций
по геодезии/ Н. А. Пархоменко. - Омск: ФГОУ ВПО ОмГАУ, 2006.
.Маслов А.
В., Гордеев А. В., Батраков Ю. Г. Геодезия. Учебное пособие для вузов. Изд. 4.-
М.: Недра, 2010.