Разработка контроллера зарядного устройства электронного блока управления
Содержание
Введение
.
Обоснование выбора схемы ЭБУ
.
Описание работы ЭБУ по схеме электрической структурной
.
Обоснование выбора элементной базы схемы ЭБУ
.
Описание работы ЭБУ по схеме электрической принципиальной
.
Описание работы БИС К556РT18
по схеме электрической функциональной
.
Расчет временных соотношений командного цикла БИС К556РT18
.
Приближенный расчет надежности ЭБУ
Заключение
Список
используемой литературы
Графическая
часть проекта
Введение
электронный блок управление
двигатель
За время своего развития средства вычислительной
техники, в том числе измерительные устройства, прошли ряд этапов, которые
принято называть поколениями ЭВМ. Выделяют четыре основных поколения.
ЭВМ первого поколения появились в 1946 году.
Первый представитель этого поколения был разработан американской фирмой ENIAC.
В СССР первые ЭВМ разработаны в Киевском институте Точной механики и
вычислительной техники под руководством академика Лебедева. В основе ЭВМ
первого поколения лежали электронные лампы (диоды и триоды). Машины
предназначались для решения несложных научно-технических вычислений. К этому
поколению относятся: МЭСМ, БЭСМ, «Минск-1», «Урал-1», «Урал-2», «Урал-3»,
«Раздан» и некоторые другие. Они были слишком громоздкие, требовательны к
мощности и ненадёжны, а навесной монтаж неудобен. Быстродействие не превышало
2-3 тысяч операций в секунду, при этом единовременно могла выполняться только
одна операция (пакетный метод).
Машины второго поколения были разработаны в 1948
году. Элементной базой этого поколения были полупроводниковые приборы
(транзисторы). Данные машины предназначались для решения более трудоёмких
научно-технических задач. Благодаря полупроводниковым элементам увеличились
объём оперативной памяти, надёжность и быстродействие ЭВМ, уменьшились размеры
и потребляемая мощность. Навесной монтаж заменили печатным, память была
основана на магнитных сердечниках. Среди машин второго поколения: МИНСК-2,
БЭСМ-2,
БЭСМ-4, Мир, БЭСМ-6 и другие. Несмотря на
повышенное быстродействие, машины как первого, так и второго поколения работали
только в пакетном режиме, выполняя только одну операцию одновременно.
Третье поколение ЭВМ (появилось в 1968 году)
имело в своей основе малые интегральные схемы (МИС). Благодаря интегральным
схемам удалось существенно улучшить технико-эксплуатационные характеристики
ЭВМ. Например, машины третьего поколения по сравнению с машинами второго
поколения имеют больший объем оперативной памяти, увеличилось быстродействие,
повысилась надежность, а потребляемая мощность, занимаемая площадь и масса уменьшились.
Для машин третьего поколения была создана первая операционная система MS-DOS.
Также появился канальный интерфейс, позволявший подключать до 256 периферийных
устройств. Но самым главным отличием от предыдущих поколений состоит в том, что
операции в машинах третьего поколения начали выполняться параллельно. К машинам
третьего поколения относились IBM
360, "Днепр-2", ЭВМ Единой Системы (ЕС-1010, ЕС-1020, ЕС-1030,
ЕС-1040, ЕС-1050,ЕС-1060 и несколько их промежуточных модификаций - ЕС-1021 и
др.), МИР-2, "Наири-2" и ряд других.
Четвёртое поколение и первый шаг на пути к
персональному компьютеру был сделан в 1970г. Основой вычислительной техники
4-го поколения стали большие (БИС) и сверхбольшие (СБИС) интегральные схемы,
созданные соответственно в 70-80-х гг. Такие ИС содержат уже десятки, сотни
тысяч и миллионы транзисторов на одном кристалле (чипе).
Феномен персонального компьютера (ПК) восходит к
созданию в 1965 г, первой мини-ЭВМ PDP-8, которая появилась в результате
универсализации специализированного микропроцессора для управления ядерным
реактором. Дальнейшим важным шагом был переход от мини- к микро-ЭВМ; этот новый
структурный уровень вычислительной техники начал формироваться на рубеже 70-х
годов, когда появление БИС дало возможность создать универсальный процессор на
одном кристалле. Первый микропроцессор Intel-4004 (4-битный) был создан в 1971
г. и содержал 2250 элементов, а первый универсальный микропроцессор Intel-8080
(8-битный), явившийся стандартом микрокомпьютерной технологии и созданный в
1974 г., содержал уже 4500 элементов и послужил основой для создания первых ПК.
Позже Intelвыпустила
16-разрядный микропроцессор Intel 80286 (или просто 286), а за ним 386. Это
первый 32-разрядный процессор, который положил начало семейству процессоров IA-32
(32-bit IntelArchitecture). Главными отличительными особенностями это
процессора были: 32-разрядные шины адреса и данных (возможность адресации - 4
Гбайт данных), 32-разрядные регистры, новый режим работы процессора -
виртуальный процессор 8086.
Процессор Intel 486 появился в
1989 году. В нём был встроенный математический сопроцессор (модели DX, DX2,
DX4), поддержка многопроцессорного режима работы, два вида кэш-памяти -
внутренней 8 кбайт (L1) и внешней (L2) и поддержка различных концепций
энергосбережения.
В октябре 1992 года Intel
объявила, что совместимые процессоры пятого поколения (разрабатывавшиеся под
кодовым названием Р5) будут называться Pentium. Первые процессоры Pentium были
выпущены в марте 1993 года.К внутреннему кэшу команд добавили 8 Кбайт для
данных. Разработана суперскалярная архитектура (с двумя конвейерами) -
выполнение двух команд за один такт (все предыдущие процессоры выполняли в
каждый момент времени только одну команду). Реализована технология предсказания
переходов (branchprediction). Внутренние шины стали иметь ширину 128 и 256 бит,
внешняя шина данных - 64бит. Процессоры поколения Р5 - IntelPentium,
IntelPentium MMX, AMD K5, Cyrix 6×86, IDT WinChip.
Следующим поколением можно назвать процессоры Р6
корпорации Intel - Pentium II и упрощенные модели Celeron, и как альтернатива
от AMD -серия Кб. К этой группе можно отнести и AMD К6-2, AMD К6-3, CyrixМ-П,
WinChip II.Процессоры Pentium III и Celeron также относятся к поколению Р6.
Отличие между процессорами Pentium и Celeron состоит только в уменьшении объеме
кэша второго уровня.
Новое поколение Р7 началось с
выпуска корпорацией AMD процессора Athlon, ранее известного под маркой К7.
Одновременно была предложена упрощенная версия Athlon - процессор Duron.
Корпорация Intel выпустила Pentium 4 (хотя и с большим отставанием). AMD затем
начала выпуск улучшенных процессоров AthlonХР для однопроцессорных компьютеров
и Athlon MP для многопроцессорных.Компания Intel в свою очередь выпустила
процессор IntelХеоп, на котором разработчики отрабатывали двухъядерную
архитектуру. Кроме того, выпускался «упрощенный» процессор Celeron на основе
Pentium 4 с тактовой частотой от 1700 МГц и выше, также относящийся к поколению
Р7.
Следующее поколение процессоров Р8 является
принципиально новым. Все поколения до Р7 являются 32-битными. В настоящее время
все процессоры Intel и AMD поддерживают 64-битные команды.Первым 64-битным
процессором был серверный AMD Opteron, а для настольных ПК - Athlon64.В начале
2004 года на рынке появился процессор AMD Athlon 64 для обычных компьютеров,
который дешевле Opteron, но не уступает ему по возможностям.В 2005 году
началось производство двухъядерных процессоров как корпорацией Intel (Core 2
Duo), так и AMD (Athlon 64 Х2).В конце 2007 года в продаже появились
четырехъядерные процессоры обеих корпораций: Intel - Core 2 Quad, AMD - Athlon
64 X4 (Phenom). Четырехъядерные процессоры особенно эффективны при
одновременной работе нескольких ресурсоемких приложений.Во втором квартале 2008
года AMD выпустила на рынок трехъядерные процессоры семейства Phenom ХЗ (они
получаются из отбракованных Phenom с четырьмя ядрами, в которых одно ядро не
работает). Phenom ХЗ были призваны составить конкуренцию двухъядерным
процессорам IntelCore 2 Duo благодаря сопоставимой цене и большему количеству ядер.
В 2008 году появились
процессоры серии IntelCorei7.
Это первое семейство, использующее микроархитектуру Nehalem.
Также является преемником IntelCore
2. В сентябре 2009 года появились процессоры IntelCorei5.
Они используют ядро Lynnfieldмикроархитектуры
Nehalem. В 2010 году
появились Corei5 с ядром Clarkdale
и со встроенным графическим процессором.
В январе 2010 года компания Intelвыпустила
двухъядерные процессоры x86-64
процессоры IntelCorei3.
Они имели встроенный графический процессор и два процессорных ядра и должны
были заменить морально устаревшие на тот момент Core
2 Duo.
В середине 80-х годов в России
из-за большого разрыва между уровнем теоретической и практической подготовки
специалистов в области вычислительной техники была проведена реформа профессионально-технического
образования, в результате чего даже на непрофилирующие специальности были
введены такие предметы, как «Основы информатики и вычислительной техники»,
выделялись деньги на строительство и развитие вычислительных центров и лабораторий.
Среди цифровых интегральных микросхем
микроконтроллеры сегодня занимают примерно такое же место, как операционные
усилители среди аналоговых. Это - универсальные приборы, их применение в
электронных устройствах самого различного назначения постоянно расширяется.
Разработкой и производством микроконтроллеров занимаются почти все крупные и
многие средние фирмы, специализирующиеся в области полупроводниковой
электроники.
Современные микроконтроллеры (их раньше называли
однокристальными микро-ЭВМ) объединяют в своем корпусе мощное процессорное
ядро, запоминающие устройства для хранения выполняемой программы и данных,
устройства приема входных и формирования выходных сигналов, многочисленные
вспомогательные узлы. Общая тенденция современного "микроконтроллеростроения"
- уменьшение числа внешних элементов, необходимых для нормальной работы. На
кристалле микросхемы размещают не только компараторы, аналого-цифровые и
цифроаналоговые преобразователи, но и всевозможные нагрузочные и
"подтягивающие" резисторы, цепи сброса.
Выходные буферы микроконтроллеров рассчитывают
на непосредственное подключение наиболее типичных нагрузок, например,
светодиодных индикаторов. Почти любой из выводов микроконтроллеров (за
исключением, конечно, выводов общего провода и питания) разработчик может
использовать по своему усмотрению в качестве входа или выхода. В результате
довольно сложный по выполняемым функциям прибор нередко удается выполнить всего
на одной микросхеме.
Постоянное удешевление микроконтроллеров и
расширение их функциональных возможностей снизило порог сложности устройств,
которые целесообразно строить на их основе. Сегодня имеет смысл конструировать
на микро-контроллерах даже такие приборы, для реализации которых традиционными
методами потребовалось бы менее десятка логических микросхем средней и малой
степени интеграции.
Процессы разработки программы для МК и обычной
принципиальной схемы цифрового устройства во многом схожи. В обоих случаях
"здание" нужной формы строят из элементарных "кирпичей".
Просто "кирпичи" разные: в первом случае - набор логических
элементов, во втором - набор команд микроконтроллера. Вместо взаимодействия
между элементами с помощью обмена сигналами по проводам - пересылка данных из
одной ячейки памяти в другую внутри МК. Процесс пересылки "выплескивается"
наружу, когда МК поддерживает связь с подключенными к нему датчиками,
индикаторами, исполнительными устройствами и внешней памятью. Различаются и
рабочие инструменты разработчика. На смену привычным карандашу, бумаге,
паяльнику и осциллографу приходят компьютер и программатор, хотя на последнем
этапе отладки изделия без осциллографа и паяльника все же не обойтись.
Еще одна трудность - недостаточное количество
полноценной технической документации и справочной литературы на русском языке.
Большинство публикаций подобного рода в периодических изданиях и особенно в
русскоязычном Интернете, зачастую - не более чем подстрочные переводы
английских оригиналов. Причем переводчики, иногда мало знакомые с предметом и
терминологией, истолковывают "темные" места по-своему, и они (места)
оказываются довольно далекими от истины. Практически отсутствуют русскоязычные
программные средства разработки и отладки программ МК.
Первое знакомство с МК для многих начинается с
повторения одной из опубликованных в "Радио" или другом издании
конструкций на их основе. И здесь сразу проявляется главное отличие МК от
обычной микросхемы: он не способен делать что-либо полезное, пока в его
внутреннее (иногда внешнее) запоминающее устройство не занесена программа -
набор кодов, задающий последовательность операций, которые предстоит выполнять.
Процедуру записи кодов в память МК называют его программированием (не путать с
предшествующим этому одноименным процессом разработки самой программы).
Необходимость программирования, на первый взгляд,
может показаться недостатком. На самом же деле это - главное достоинство,
благодаря которому можно, изготовив, например, всего одну плату с МК и
несколькими соединенными с ним светодиодными индикаторами и кнопками, по
желанию, превращать в частотомер, счетчик импульсов, электронные часы, цифровой
измеритель любой физической величины, пульт дистанционного управления и
контроля и многое другое.
В свете вышеизложенного в данном курсовом
проекте разрабатывается контроллер зарядного устройства
Обоснование выбора схемы ЭБУ
ЭБУ - электронный блок управления двигателем
автомобиля, его другое название - контроллер. Он принимает информацию от
многочисленных датчиков, обрабатывает ее по особым алгоритмам и, отталкиваясь
от полученных данных, отдает команды исполнительным устройствам системы.
Электронный блок управления является составным звеном бортовой сети автомобиля,
он ведет постоянный обмен данными с другими компонентами системы:
антиблокировочной системой, автоматической коробкой передач, системами стабилизации
и безопасности автомобиля, круиз-контролем, климат-контролем. Обмен информацией
ведется посредством CAN-шины, которая объединяет все электронные и цифровые
системы современного автомобиля в одну сеть.
Благодаря такому подходу можно оптимизировать работу
двигателя: расход топлива, подачу воздуха, мощность, крутящий момент и др.
Основными функциями ЭБУ являются:
· Управление и контроль за впрыском
топлива в инжекторных двигателях
· Контроль за зажиганием
· Управление фазами газораспределения
· Регулировка и поддержание
температуры в охлаждающей системе двигателя
· Контроль за положением дроссельной
заслонки
· Анализ состава выхлопных газов
· Контроль за работой системы
рециркуляции отработанных газов.
Кроме того на контроллер поступает информация о
положении и частоте вращения коленчатого вала, текущей скорости движения
транспортного средства, о напряжении в бортовой сети автомобиля. Также ЭБУ
оснащен системой диагностики и в случае обнаружения каких-либо неполадок или
сбоев информирует о них владельца посредством кнопки Check-Engine.
Разрабатываемая версия устройства является
улучшенной версией электронного блока управления на ПЗУ БИС К556РТ18 с меньшим
потреблением тока и напряжения, что можно увидеть в сравнении:
|
БИС
К556РТ18
|
БИС
HM76161
|
|
Рабочие
напряжения: 11,2В ... 14В Номинальный рабочий ток: 1,4А
|
Рабочие
напряжения: 20В ... 25В Номинальный рабочий ток: 7А - 10А
|
Это и обусловило выбор данного устройства
Описание работы ЭБУ по схеме электрической
структурной
Схема электрическая структурная ЭБУ состоит из
следующих функционально-законченных частей:
Счетчики DD1
- DD2
ПЗУ DD4
Логические элементы DD5
- DD7
Катушка зажигания
Катушка зажигания служит для вывода данных.
Микросхемы К561ИЕ10, выполняют функцию счётчиков
периодов.
Стабилизатор напряжения преобразует напряжение
питания в +5В
ПЗУ БИС КР556РТ18 служит для хранения данных
Обоснование выбора элементной базы схемы ЭБУ

Рис.1 Условно-графическое обозначение
логического элемента DD5
|
Название
характеристики
|
Параметры
характеристики
|
|
Время
задержки
|
50
нс
|
|
Напряжение
питания
|
3..15
В
|
|
Макс
напряжение питания
|
18
В
|
|
Мощность
потребления
|
0,4
мкВт
|
Рис.2 Условно-графическое обозначение ПЗУ БИС
К556РТ18
|
Напряжение
питания
|
4.5
.. 5.5 В
|
|
Ток
в режиме ожидания
|
200
мкА
|
|
Ток
потребления в режиме питания от батареи
|
5..50
нА
|
|
Температурный
диапазон
|
-40°C..+85°C
|
|
Напряжение
внешней батареи
|
2.0
.. 3.5 В
|
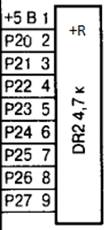
Рис.3 Условно-графическое обозначение
резисторной сборки DR
1,2,3 4.7к
|
Тип
|
4609x
|
|
Номинальное
сопротивление
|
4.7
|
|
Единица
измерения
|
ком
|
|
Номин.мощность,Вт
|
0.25
|
|
Макс.рабочеенапряжение,В
|
100
|
|
Рабочая
температура,С
|
-55…125
|
|
Количество
резисторов
|
9
|
|
Схема
соединения
|
a
|
Из представленных параметров микросхем видно,
что данные элементы распространены, доступны, согласуются между собой без
вспомогательных узлов, работают в пределах стандартной 5-вольтовой логики и
обладают приемлемым диапазоном рабочих температур, что и обусловило выбор
данной элементной базы.
Описание работы ЭБУ по схеме электрической
принципиальной
Рассмотрим работу устройства БИС КР556РТ18 по
схеме электрической принципиальной в положительной логике (U1=2.4В, U0=5В.)
Кварцевый резонатор ZQ2 серией импульсов
запускает микроконтроллер через входы XT1 XT2(19, 18).
Процесс преобразования аналогового сигнала в
цифровой происходит следующим образом. После подачи питания на управляющее
устройство программа конфигурирует регистры T2CON
и T2MOD
таймера Т/С2 для работы в режиме захвата. Бит CP/RI.2
регистра T2CON
устанавливается в 1 для выбора режима защелкивания данных, а бит GT2
- в 0 для подсчета числа машинных циклов микроконтроллера. На вход счетчика TL2
будет подаваться частота 2 МГц.
Бит TR2
программа использует для запуска счета, а бит EXEN2
- для разрешения защелкивания содержимого счетчиков TL2
и ТН2 в регистры RCA-
P2L
и RCAP2H
соответственно. Бит 6 порта РЗ (10 - 17) устанавливается в 0, а бит 1 порта РЗ
- в 1, открывая транзисторы VT17,
VT18 и тем самым
разряжая интегрирующий конденсатор С9. Элементы
VT17 и R18
обеспечивают предварительную разрядку конденсатора С9, предохраняя ключ VT18
ог пробоя, поскольку конденсатор в конце цикла преобразования накапливает
значительный заряд.
Для начала преобразования программа
устанавливает биты TR2,
F.XEN2
в 1, бит 6 порта РЗ - в 1, а бит 1 порта РЗ - в 0. Конденсатор С9 начинает
заряжаться от источника стабильного тока, выполненного на элементах R15,
R17, DA1.
Компаратор DA2 сравнивает
измеряемое напряжение, поступающее на вывод 3, с линейно-нарастающим
напряжением на выводе 2. Как только нарастающее напряжение станет больше
измеряемого, на выводе 1 DA2
произойдет перепад из лог. 1 в лог. О, который установит флаг прерывания EXEN2.
Подпрограмма обслуживания прерывания проанализирует 16-разрядное число,
считанное из регистров RCA-
P2L
и RCAP2H,
и если оно окажется больше 10000, будет включен делитель напряжения,
выполненный на элементах VT16,
R13, R16.
Ограничение напряжения в 10 В связано с тем, что при разности напряжений около
3 В и менее между выводами 1 и 3 стабилизатора РА1, уменьшается ток зарядки
конденсатора С9 и контроллер выхолит из рабочего режима.
При включенном делителе напряжения на крайнем
левом индикаторе будет отображаться символ «и», и число, считанное из регистров
RCAP2I.
и RCAP2H,
будет умножаться на два. При отключенном делителе на индикаторе отображается
символ «и». Соответственно, разрешающая способность будет 2 мВ и 1 мВ. Если при
следующем запуске измеренное напряжение окажется более 20 В, символ «и» будет
мигать с частотой 2 Гц и во время каждого цикла преобразования будет издаваться
короткий звуковой сигнал, назначение напряжения на индикаторе будет отображаться.
Делитель напряжения автоматически отключится, как только измеряемое напряжение
станет менее 9,8В. Стабилитрон VD2
ограничивает напряжение на выводе 3 компаратора DA2,
не допуская ситуацию, при которой входное напряжение может оказаться больше
напряжения на интегрирующем конденсаторе С9, что вызовет переполнение счетчиков
TL2, ТН2 и установку
флага переполнения TF2.
Этого допускать нельзя, поскольку с помощью флага TF2
определяется отсутствие входного напряжения. Происходит это следующим способом.
При запуске интегратора начинается подсчет машинных циклов, но поскольку
напряжение на выводе 3 компаратора DA2
будет изначально больше, чем на выводе 2, на выводе 1 останется лог. 0, т. е.
перепада из 1 в 0 не будет. Счетчики TL2,
ТН2 переполнятся, и будет установлен флаг TF2.
Подпрограмма обработки прерывания проигнорирует данные в регистрах RCAP2L,
RCAP2H
и присвоит измеренному напряжению нулевое значение.
Табл.1
|
Входы
|
|
DD1
|
|
T2EA/VPP
|
PSEN
|
PL
|
BUZ
|
RZR
|
ZR
|
32K
|
T2
|
P30
|
|
1
|
1
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
|
1
|
1
|
0
|
1
|
0
|
1
|
0
|
1
|
0
|
|
1
|
0
|
1
|
0
|
1
|
0
|
1
|
1
|
1
|
|
1
|
0
|
0
|
1
|
0
|
1
|
0
|
0
|
1
|
|
1
|
1
|
1
|
0
|
0
|
0
|
1
|
0
|
1
|
Табл.2
|
Выходы
|
|
DD1
|
|
AD0
|
AD1
|
AD2
|
AD3
|
AD4
|
AD5
|
AD6
|
A7
|
A8
|
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
|
1
|
1
|
0
|
1
|
0
|
0
|
0
|
1
|
1
|
|
1
|
0
|
1
|
1
|
0
|
1
|
0
|
1
|
0
|
|
0
|
0
|
1
|
0
|
0
|
1
|
1
|
0
|
1
|
|
1
|
0
|
1
|
1
|
1
|
0
|
1
|
0
|
0
|
|
Входы
DD4
|
Выходы
DD4
|
|
(E)
|
(F)
|
(E)< (F)
|
(E)= (F)
|
(E)> (F)
|
|
1
|
1
|
0
|
1
|
0
|
|
0
|
0
|
1
|
0
|
0
|
|
1
|
0
|
0
|
0
|
1
|
|
0
|
1
|
0
|
1
|
0
|
Описание работы для БИС К556РТ18 по схеме
электрической функциональной
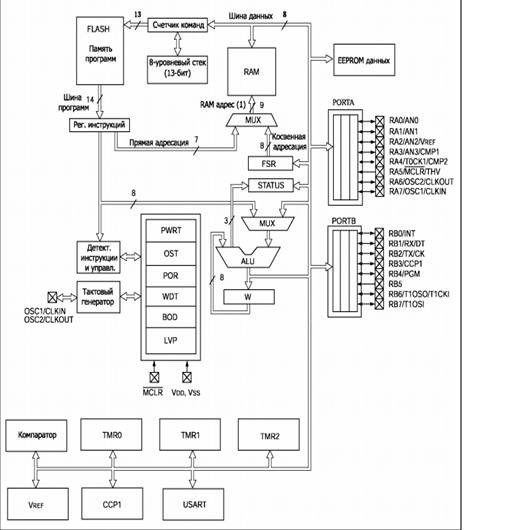
· Микроконтроллер PIC16F628
- микроконтроллер фирмы MICROCHIP.
15 линий ввода/вывода с индивидуальным заданием направления;
· Высокий втекающий/вытекающий ток для
непосредственного управления светодиодными индикаторами.
· Универсальный синхронно-асинхронный
примопередатчик (USART/SCI);
· 16 байт общей памяти;
· Модуль захвата/компаратора/ШИМ:
захват 16 разрядов, макс. разрешающая
способность 12,5 нс;
сравнение 16 разрядов, макс. разрешающая
способность 200 нс;
ШИМ, макс. разрешающая способность 10 разрядов;
FLASH конфигурационные биты для установки
режимов генератора;
Двухчастотный INTRC c низким энергопотреблением;
EXTRC: внешний недорогой RC-генератор;
XT: стандартный генератор на кварцевом
резонаторе;
LP: экономичный, низкочастотный генератор на
кварцевом резонаторе.
HS: высокочастотный генератор на кварцевом
резонаторе.
EC: вход для подключения внешнего генератора.
Технология КМОП:
· Экономичная, высокоскоростная
технология КМОП FLASH
· Полностью статическая архитектура
· Широкий рабочий диапазон напряжений
питания:
PIC16F628 - от 3,0В до 5,5В>Коммерческий,
промышленный и расширенный температурный диапазоны
· Низкое потребление энергии: - < 2
мА при 5,0 В, 4,0 МГц
- 15 мкА (типичное значение) при 3 В, 32 кГц
< 1,0 мкА (типичное значение) в режиме
STANDBY при 3В
|
Входы
|
|
DD3
|
|
RA2
|
RA3
|
RA4
|
MCLR
|
GVD
|
RBO
|
RB1
|
RB2
|
RB3
|
|
1
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
|
0
|
0
|
1
|
0
|
0
|
1
|
1
|
1
|
1
|
|
0
|
1
|
0
|
1
|
1
|
0
|
0
|
1
|
1
|
|
0
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
|
1
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
Выходы
|
|
DD3
|
|
RA1
|
RA0
|
OSC1
|
OSC2
|
+5B
|
RB7
|
RB6
|
RB5
|
RB4
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
|
1
|
1
|
0
|
1
|
1
|
0
|
1
|
0
|
1
|
|
1
|
0
|
1
|
0
|
1
|
0
|
1
|
0
|
0
|
|
1
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
1
|
|
0
|
1
|
1
|
1
|
0
|
1
|
1
|
0
|
0
|
RA2
+5B
RB6
Расчет временных соотношений командного цикла
БИС КР556РТ18
Тактовая частота работы МК задается частотой
работы кварцевого резонатора (ZQ2)
= 24МГц.
Найдем период следования импульсов сигнала ZQ2 (TZQ2):
ZQ2= 109[нс]
=
109[нс]
=  *109
= 41 [нс]
*109
= 41 [нс]
При расчете были использованы следующие
справочные данные :
. Время генерации адресов P1.0- P1.7
(tale) = (TZQ1
- 9)нс = 32 нс.
. Длительность сигнала фиксации младшего байта
адреса
(tale)
= (2*TZQ- 32) = 2*41
- 52 = 24 нс.
. Время задержки сигнала фиксации, младшего
байта адреса относительно сигналов адреса P1.0- P1.7
(Tdelay) = TZQ2
-
8 = 33 нс.
. Длительность сигнала чтения команды из памяти
ТСK:
(Ttck)
= 3*TZQ2-24
= 3*41 - 24 = 99 нс.
. Время задержки сигнала чтения команды TCK
относительно сигнала ALE:
(Tdelay2) = TZQ2
- 24 = 41 - 24 = 17нс.
. Время обработки исполнения команды: Tи=
9* TZQ2
= 9*41 = 369 нс.
Время выборки команды из памяти будет равно
сумме времени генерации адреса, времени задержки сигнала фиксации младшего
байта адреса ALE относительно сигналов адреса, длительности сигнала ALE,
времени задержки сигнала чтения команды SCK относительно сигнала SCL
и длительности сигнала SCK.
выб
= Tale + TALE + Tdelay + Ttck + Tdelay2
= 32 +24+33+99+17 = 205 нс.
Длительность командного цикла БИС КР556РТ18
будет равно суммарному времени выборки команды из памяти и времени обработки и
исполнения команды.
= t+TИ
= 205 + 369 = 574 нс.
В результате расчета временных соотношений
командного цикла, общая задержка составила 574 нс., что соответствует
техническим условиям на данную БИС.
Приближенный расчет надежности схемы ЭБУ
Надёжность - это свойство изделия или отдельных
его элементов выполнять заданные функции, сохраняя во времени значения
установленных эксплуатационных показателей в необходимых пределах,
соответствующих данным режимам и условиям использования технического
обслуживания, ремонта, хранения и транспортирования.
Надёжность - важная характеристика любой
конструкции. На показатель надёжности влияют следующие характеристики схемы:
элементная база, количество паек, условия эксплуатации, безотказность, долговечность,
ремонтопригодность и сохраняемость.
Безотказность - свойство объекта непрерывно
сохранять работоспособность в течение некоторого промежутка времени или
некоторой наработки.
Долговечность - свойство объекта сохранять
работоспособность до наступления предельного состояния при установленной
системе технического обслуживания и ремонта.
Ремонтопригодность - свойство объекта,
заключающееся в приспособленности к предупреждению и обнаружению отказов,
повреждений и устранению их последствий путём проведения ремонта и технического
обслуживания.
Сохраняемость - свойство объекта сохранять
исправность и работоспособность после хранения и транспортировки.
Расчёт надёжности - это определение качественных
характеристик надёжности с целью выявления слабых мест в электрических схемах и
поиска путей повышения надёжности. Рассчитанные данные должны соответствовать
техническим условиям. В случае получения надёжности ниже требуемой должны быть
приняты меры для её повышения.
Существует несколько методов определения надёжности
и они делятся на 2 группы: приближённый (или ориентировочный) расчёт и полный
(или окончательный) расчёт. В данном курсовом проекте применяется приближённый
метод расчёта надёжности КЗУ на базе МК БИС Atmel
по экспоненциальному закону.
Интенсивность отказов показывает,какая часть
элементов по отношению к общему количеству исправно работающих элементов в
среднем выходит из строя за единицу времени.
=1/λобщ[1/час]
Вероятность безотказной работы P(t)
-это вероятность того, что в пределах заданной наработки (т.е. заданного
интервала времени) отказ объекта не возникает.
(t)
= e- λобщ*t
Произведём расчёт надёжности схемы КЗУ на базе
МК БИС AT89C52-24PI по схеме электрической принципиальной. Данные для расчёта
удобно представлять в виде таблицы, которая составляется на основе справочных
данных.
)Определяем общее значение интенсивности отказов
элементов схемы:

(0,000198 + 0,002 + 0,0144 + 0,27 + 0,228 +
0,756 + 0,756 + 0,0012 + 0,18 + 0,0024 + 0,0044+0,4+0,0016) * 10-6
[1/час] = 2,016298 * 10-6 [1/час]
) Определяем наработку на отказ:
0=
1/ λобщ
= 1/(2,016298* 10-6) = 49595,9 часов = 2109,7 дней ≈ 6,2 лет
) Вычисляем вероятность безотказной работы для
нескольких промежутков времени:
(t)
= e-λобщ*t
(0) = e-2,016298*
10^-6 * 0 = 1
P(10) = e-2,016298* 10^-6 * 10 =0,999971204(100)
= e-2,016298* 10^-6 * 100 = 0,999712073(1000) = e-2,016298*
10^-6 * 1000 = 0,997124455(10000) = e-2,016298* 10^-6 * 10000 =
0,981613808(100000) = e-2,016298* 10^-6 * 100000 = 0,8173974725
4) Наряду с вероятностью безотказной работы P(t)
можно определить показатель вероятности отказов Q(t),
который определяется по формуле:
(t)
= 1 - P(t)
(0) = 1 - 1 = 0
Q(10) = 1
-0,9999798372 = 0,000201628
Q(100) = 1
-0,999712905 = 0,0002016095
Q(1000) = 1
-0,997124455 = 0,0020142366
Q(10000) = 1
-0,971613808 = 0,028386192
Q(100000) = 1
-0,8173974725 = 0,1826025275
При расчёте надёжности было установлено, что при
малом времени эксплуатации вероятность безотказной работы близка к 1, а
вероятность отказа близка к 0. При длительном периоде эксплуатации вероятность
безотказной работы стремится к 0, а вероятность отказа - к 1.
В результате расчёта надёжности было
установлено, что схема ЭБУ на базе БИС К556РT18
является достаточно надёжной и обеспечивает безотказную работу в течение 5,8
лет.
|
№
|
Наименование
|
Кол-во
Ni
|
λ*10-6[1/час]
|
Λ*Ni*10-6[1/час]
|
|
1
|
ПЗУ
БИС К556РT18
|
1
|
0,000198
|
0,000198
|
|
2
|
Кварцевые
резонаторы
|
2
|
0,0012
|
0,0012
|
|
3
|
Резисторная
сборка
|
3
|
0,001387
|
0,04161
|
|
4
|
Стабилизатор
напряжения
|
1
|
0,37
|
0,37
|
|
5
|
Компараторы
|
2
|
0,008
|
0,016
|
|
6
|
Семисигментные
индикаторы
|
6
|
0,0012
|
0,0072
|
|
7
|
Диоды
|
3
|
0,0011
|
0,0044
|
|
8
|
Резисторы
|
28
|
0,028
|
0,784
|
|
9
|
Конденсаторы
|
12
|
0,114
|
0,368
|
|
11
|
Биполярные транзисторы
|
21
|
0,0032
|
0,016
|
|
12
|
Пайка
|
400
|
0,001
|
0,301
|
|
13
|
Всего
|
436
|
|
2,016298
|
Масштабы:
в 1 см-0,1 P(t), Q(t);
в 1.5 см- X*10n(где n=1, 2, 3... 9)
Заключение
В данном курсовом проекте разрабатывается схема
МП для МК БИС К556РТ18.
В пояснительной записке рассматривается история
поколений ЭВМ и микроконтроллеров.
Макетная плата предназначена для отладки
программ, написанных для микропроцессоров фирмы Microchip
типа PIC16F628,
кроме этого она подойдет для всех микроконтроллеров фирмы Microchip, имеющих
корпус DIP и 18
выходов. Это и обусловило выбор данного устройства.
Описана работа устройства по схеме электрической
структурной, где представлены функционально законченные части и соединения
между ними.
Обоснован выбор элементной базы: МП для МК БИС
К556РТ18 состоит из функционально законченных частей, которые в свою очередь относительно
доступны, распространены, БИС и ИМС согласуются друг с другом без
дополнительных связующих устройств, что и обусловило выбор данной элементной
базы.
Описана работа макетной платы на базе МК БИС
К556РТ18 в положительной логике по схеме электрической принципиальной,
подтверждена таблицами истинности и временными диаграммами.
Описана работа МК БИС К556РТ18 по схеме
электрической функциональной, подтверждена таблицами истинности и временными
диаграммами.
В результате расчета временных соотношений командного
цикла, общая задержка составила 574 нс., что соответствует техническим условиям
на данную БИС.
Предварительный расчет надежности показал, что
схема МП для МК БИС К556РТ18 достаточно надежна, наработка на отказ составила
~8.5 лет.
В графической части разработаны: схема
электрическая принципиальная МП для МК БИС К556РТ18, условно-графическое
обозначение и временные диаграммы работы МК БИС К556РТ18.
Список используемой литературы
1.
Новиков Ю.В. "Основы цифровой схемотехники"
.
Нефедов А.В. "Интегральные микросхемы и их зарубежные аналоги".
.
Пехотник Н.Р "Цифровая схемотехника" ГБОУ КИГМ №23. 2014/15 учебный
год г.Москва
Список используемых технических средств
Используемые
ресурсы сети Интернет:
.
#"871588.files/image009.jpg">
Рисунок 1: Схема электрическая принципиальная
ЭБУ
Рисунок 2: УГО ПЗУ БИС К556РТ18