Основы теории и схемы построения горизонтальных астрокомпасов
Контрольная
работа
основы теории и схемы построения горизонтальных астрокомпасов
Содержание
1. Принцип действия, кинематические
схемы и основные алгоритмы горизонтального астрокомпаса
. Анализ погрешностей
горизонтального астрокомпаса
Литература
Приложения. Рисунки к разделам
1.
Принцип действия, кинематические схемы и основные алгоритмы горизонтального
астрокомпаса
Астрономические компасы,
используемые на летательных аппаратах, предназначены для определения истинного
курса. В состав астрокомпасов входят плоскостные, пеленгаторы, осуществляющие
слежение либо за плоскостью вертикала, либо за плоскостью склонений. Обычно в
современных самолетных астрокомпасах осуществляется пеленгация Солнца, хотя
принципиально можно пеленговать и звезды.
Компас, в котором пеленгующая
плоскость следит за плоскостью вертикала светила, называют горизонтальным
астрокомпасом.
Соответственно компас, в
котором пеленгующая плоскость совмещается с плоскостью склонений светила,
называют экваториальным астрокомпасом.
Положим, что плоскостной
пеленгатор установлен на горизонтированном основании (рис.1). При этом ось у,
вокруг которой разворачивается пеленгатор в процессе слежения за светилом,
будет направлена по вертикали и пеленгующая плоскость с точностью до статических
и динамических погрешностей фотоследящей системы будет совпадать с плоскостью
вертикала светила
С датчика угла ДУа может быть
снят сигнал о величине курсового угла светила (КУС) - ак, т. е. об угле между
линией, по которой направлена проекция продольной оси JlA
на плоскость горизонта, и линией пересечения плоскостей вертикала светила и
горизонта. Поскольку при помощи плоскостного пеленгатора, установленного на
горизонтированном основании, может быть измерен только курсовой угол светила,
то пеленгатор такого типа обычно называют датчиком курсового угла светила
(ДКУС) или датчиком курсового угла (ДКУ)·
Полагая, что ось X0
(см. рис. 24) направлена на Север, находим, что для определения истинного курса
самолета, при измеренном с помощью ДКУС курсовом угле светила, можно
воспользоваться выражением:
y = Ас -
aк
. (1)
Для определения курса по
формуле (1) необходимо знать угол азимута пеленгуемого светила. В современных
горизонтальных астрокомпасах, например в компасе ДАК ДБ [1], угол азимута
светила вычисляется в электромеханическом аналоговом устройстве, называемом
сферантом.
Если обратиться к формулам
(21), то нетрудно видеть, что для вычисления АС (или АЮ) можно использовать,
например, выражение
 , (2)
, (2)
либо выражения
 (3)
(3)
 (4)
(4)
 . (5)
. (5)
Из формул (2) ... (5) следует,
что при их применении для вычисления угла азимута светила должны быть известны:
значения координат точки места j и l;
прямое восхождение светила a; гринвичский
часовой угол tг либо звездное
время S и угол прямого
восхождения светила a.
В вычислительном устройстве
типа сферанта, входящем в состав современных астрокомпасов, значения указанных
углов обычно вводятся вручную. В сферанте по существу осуществляется построение
геометрической модели небесной сферы. На соответствующих осях модели
устанавливаются датчики углов, с которых можно получить сигналы о величине
углов АC и h
либо о тригонометрических функциям этих углов.
Таким образом, функциональную
схему горизонтального астрокомпаса можно представить в следующем виде (рис.2).
Использование устройства типа
сферанта обеспечивает сравнительно невысокую точность вычисления угла азимута
светила, что приводит к погрешностям в определении курса самолета. Вычисление
угла азимута можно выполнить более точно, если использовать для этой цели
бортовую ЦВМ. При этом потребуется осуществить выбор ее функциональных
алгоритмов, которые принципиально можно строить на базе двух подходов: путем
использования геометрических соотношений либо кинематических уравнений.
Использование геометрических
соотношений вида (2) ... (5) позволяет построить две группы алгоритмов.
Первая группа предполагает
вычисление функции
АC
= arctg x (6)
либо
АC
= arcctg х, (7)
где
 .
.
Вторая группа алгоритмов
предусматривает вычисление функций
АC
= arccos |y| (8)
АC
= arcsin |z|
, (9)
где аргументы обратных
тригонометрических функций вычисляются так:
у
= (1/cos h) [cos j sin d
- sin j cos
d
cos (tГ
+ lВ)];
(10)
z
= - (1/cos h)
cos d
sin (tT + lВ); (11)=
arcsin [sin j sin d
+ cos j cos
d
cos (tГ
+ lВ)].
(12)
По сочетанию знаков аргументов y
и z определяется
принадлежность угла АC
к определенной четверти. Вычисление АC
по (8) либо по (9) осуществляется в зависимости от численного значения
аргументов у и z.
При 0 £
| y | £
p/4
используется
алгоритм вычисления (9).Соответственно, вычисления по (8) удобней осуществить
при p/4
£
| у | £
p/2.
Достоинством алгоритмов
геометрического типа является то, что вычисление угла азимута светила по ним
может быть осуществлено в требуемый момент полета. Для этого достаточно ввести
в БЦВМ исходную информацию о величинах j; l;
d
и tГr.
Кинематический алгоритм
определения азимута и высоты светила можно получить, если воспользоваться
выражениями (16), которые представим в виде
АC = (u +  ) sin
j - [
) sin
j - [ sin AC -
(u + )
cos j cos
AC] tgh ;= cos
AС
+ (u + ) cos
j sin
AС.
sin AC -
(u + )
cos j cos
AC] tgh ;= cos
AС
+ (u + ) cos
j sin
AС.
Система нелинейных дифференциальных
уравнений (13) может быть решена в БЦВМ, если в машину вводится информация о
величинах j, и , а также
значения  и h0,
соответствующие координатам пеленгуемого светила на момент начала решения
системы (13) в БЦВМ. Поскольку угловые скорости изменения координат точки места
ЛА сравнительно невелики, то при решении системы уравнений (13) не
накладываются жесткие требования на быстродействие БЦВМ.
и h0,
соответствующие координатам пеленгуемого светила на момент начала решения
системы (13) в БЦВМ. Поскольку угловые скорости изменения координат точки места
ЛА сравнительно невелики, то при решении системы уравнений (13) не
накладываются жесткие требования на быстродействие БЦВМ.
В отличие от алгоритма
геометрического типа решение системы
(13) в БЦВМ должно осуществляться непрерывно после ввода начальных значений
координат светила и h0.
Датчик курсового угла светила,
используемый в астрокомпасе, позволяет получить информацию об этом угле с
приемлемой точностью, если ось вращения фотоголовки вертикальна. Для
поддержания ориентации этой оси пеленгатор устанавливается на горизонтированной
платформе, что, в свою очередь, приводит к усложнению кинематической схемы,
возрастанию массы и габаритов.
Снизить массо-габаритные
характеристики можно, если плоскостной пеленгатор устанавливать, не на
горизонтированной платформе, а «на корпусе» летательного аппарата. Поскольку
при такой установке ось вращения фотоголовки пеленгатора будет участвовать во
вращательном движении корпуса ЛА, то возникающую при этом погрешность в
определении курсового угла светила можно скомпенсировать путем вычисления в вычислительном
устройстве либо в БЦВМ соответствующих поправок.
Получим алгоритмы вычисления
поправок в показания ДКУС, установленного «на корпусе» ЛА. Кинематическая схема
датчика представлена на рис.3, а рис.4 иллюстрирует процесс появления
погрешности в определении курсового угла светила при отклонении оси у
пеленгатора от вертикали.
На рис.4 принята следующая
последовательность поворотов основания и пеленгатора от первоначального
положения, при котором оси у и YС
вертикальны. Первый поворот происходит вокруг оси z
на угол e. При
этом оси х; у фотоголовки пеленгатора поворачиваются в плоскости вертикала
светила и орт S остается в
пеленгующей плоскости. Поскольку при таком повороте не возникает сигнала с
фотоголовки, то не изменяется и сигнал с датчика угла ДУa.
После поворота на угол e
оси трехгранника, жестко связанные с фотоголовкой, занимают положение x1;
y1; z.
Второй поворот основания и пеленгатора
происходит вокруг оси x1
на угол n. После этого поворота оси
трехгранника фотоголовки займут положение x1,
у2, z1. Теперь, как
нетрудно видеть, вектор S
будет отклонен от плоскости осей x1,
у2, , совпадающей с пеленгующей плоскостью фотоголовки, и с последней будет
снят сигнал, который поступит на усилитель и двигатель Двa.
В результате фотоголовка пеленгатора будет вращаться вокруг оси у2 до тех пор,
пока оси связанного с ней трехгранника не займут положение x2;
у2; z2. При этом вектор S
вновь окажется в пеленгующей плоскости фотоголовки и сигнала с нее не будет.
Отработка сигнала фотоголовки, возникшего при повороте на угол n,
приведет к тому, что оси x1,
у1 окажутся повернутыми на угол a1, который и
определяет погрешность в измерении курсового угла светила, поскольку с датчика
угла ДУa после отработки сигнала фотоголовки
будет снят сигнал об угле a2 = aк
+ a1.
Получим аналитическое выражение
для этой погрешности.
Обозначим угол между вектором S
и осью х2 через b1 и
спроецируем вектор S на оси x1;
у2; z1.
 (14)
(14)
Проекции вектора S на те же
оси можно представить и так:
 (15)
(15)
Из (14) находим
Соответственно, (15)

Следовательно,

или, приняв во внимание, что b = h,
 (16)
(16)
Формула (16) позволяет найти
знак и величину погрешности в определении курсового угла светила, если известны
величины h,
e
и
v.
При использовании этой формулы
для вычисления поправок в показания датчика курсовых углов светила ее обычно
упрощают, принимая tg
a1
a1,
h > e.
Тогда
a1 tg
h sin
n. (17)
Принципиальная
электрокинематическая схема датчика курсовых углов светила, в котором вводится
поправка на погрешность в измерении курсового угла светила, представлена на
рис.5 [3].
На оси, совпадающей по
направлению с осью x
фотоголовки,
установлен маятник, на котором закреплен подвижный контакт синусного датчика
углов. Если имеет место поворот пеленгатора вместе с основанием на угол n,
то
с датчика будет снят сигнал U2
=k sin
n. B
блоке умножения (БУ) осуществляется перемножение сигналов U2
и u1 = k1tgh,
поступающего со сферанта.
На выходе этого блока будет
получен сигнал U3 =k2
tg h
sin n,
пропорциональный величине поправки.
Построение датчика курсовых
углов светила по кинематической схеме, представленной на рис.5, предполагает
использование маятника как измерителя угла отклонения от вертикали v.
Наличие маятника несколько усложняет кинематику ДКУ. Кроме того, измерение угла
н
при
помощи маятника будет осуществляться с погрешностями, свойственными физическому
маятнику как датчику вертикали.
От этих недостатков можно
избавиться, если использовать для получения уточненного значения курсового угла
светила информацию об углах тангажа и крена, поступающую, например, от
самолетной гировертикали (СГВ). При этом, естественно, сам датчик курсовых углов
конструктивно можно упростить за счет исключения маятникового устройства и
элементов с ним связанных.
Алгоритмы вычисления курсового
угла для этого случая рассмотрены ниже.
2.
Анализ погрешностей горизонтального астрокомпаса
На погрешность определения
курса летательного аппарата при помощи горизонтального астрокомпаса будут
влиять погрешности вычисления угла азимута пеленгуемого светила и определения
курсового угла. Основное уравнение погрешностей горизонтального астрокомпаса,
воспользовавшись (1), можно представить в виде
dy =
dАС
-
daЗ.
(18)
Для того чтобы, используя (18),
найти погрешность в определении курса, необходимо располагать выражениями для
погрешностей в вычислении азимута dАС и определении
курсового угла светила daк.
Получим
выражения для этих погрешностей.
Ошибка в вычислении азимута
светила, главным образом, зависит от погрешностей в задании координат точки
места летательного аппарата. Будем полагать, что вычисление азимута
осуществляется с использованием формул вида
sin
АС = -
(1/cos h)
cos d
sin (tГ
+ lВ);
(19)
cos AС
= (1/cos h) [cos j sin d
- sin j cos
d
cos (tГ
+ lВ)
]; (20)h = sin j
sin d + cos j
cos d
cos (tГ
+ lВ).
(21)
Примем, что погрешность в
вычислении азимута зависит только от погрешностей задания координат точки места
dj
и
dlВ,
которые,
в свою очередь, можно рассматривать как малые величины.
Теперь выражение для
погрешности dАС можно получить следующим путем. Поделив (19)
на (20), находим
 (22)
(22)
Варьируя выражение (22) по
переменным AC, j и lВ, получаем
 (23)
(23)
Учитывая далее, что в соответствии с
(19) ... (21)
[cos j sin d - sin j cos d cos (tГ
+ lВ)]
2
=
cos2 AC cos2 h; (24)
cos d
sin (tГ
+ lВ) =
- sin AC cos h, (25)
из
(23) имеем
dAC = {sin AC sin hdj
- cos d [cos
AC cos (tГ + lВ)
+
+ sin AC sin j
sin (tГ
+ lВ)] dlВ]
sc h. (26)
По формуле (26) можно оценить
погрешности в вычислении азимута светила, если заданы: dj;
dlВ
- погрешности в определении широты и долготы
места; траектория полета - функции j(t)
и lВ(t);
величина склонения и время суток, когда совершается полет.
При задании указанных величин
горизонтальные координаты светила, знание которых необходимо при вычислении dАС,
могут быть найдены путем решения системы дифференциальных уравнений вида (16)
либо путем вычисления по формулам (17) ... (21).
При выводе формул для
определения погрешности daк рассмотрим
следующие случаи.
Положим, что пеленгатор
установлен на точно горизонтированном основании. Тогда погрешность в
определении курсового угла будет зависеть только от погрешностей фотоследящей
системы
daк
= d1aк
. (27)
Если полагать, что платформа
отклонена от плоскости горизонта путем поворота вокруг осей подвеса на углы J1
и g1, которые характеризуют погрешности
стабилизации платформы в горизонте, то в определении угла aк,
появится дополнительная погрешность d2aк
,
зависящая
от углов J1 и g1.
Выражение для этой составляющей
погрешности можно получить следующим путем. Положим, что ось вращения
фотоголовки отклонена от вертикального положения за счет поворотов плат формы
вокруг осей подвеса на углы J1 и g1.
Обозначив через j1
орт повернутой оси вращения пеленгатора, а через i,
j, k
- орты горизонтного платформенного трехгранника,
можем записать
= i [(cos J1
sin J -
sin J1 cos J)
cos J -
(sin J sin J1
+
+ cos Jcos
J1) sin J
cos g1] + j [(sin J
cos J1 -
- cos J
sin J1) sin J
+ (sin J sin J1
+ cos J cos J1)
cos J cos g1]
+
+ k (sin J
sin J1 + cos J
cos J1) sin g1
, (28)
где J
- угол тангажа самолета или угол поворота
наружной рамки подвеса платформы.
Если полагать углы J1
и g1 малыми, то из (28) можно получить следующее,
справедливое с точностью до величин второго порядка малости, выражение:
1 j
- iJ1 + kg1
sin J. (29)
Полагая далее, что ось вращения
пеленгатора заняла то же самое положение, определяемое ортом j1,
за счет поворотов платформы на углы e и n
(см. рис.4), для орта j1
можно получить следующее выражение:
= -
i(cos a cos
n sin
e
+ sin a
sin n)
+ j cos n
cos e
+ k (cos a
sin n
- sin a
cos n
sin e).
(30)
При малых углах e
и
n из (30) находим
горизонтальный
астрокомпас погрешность азимут
j1 j -
j(ecos a
+ n sin
a)
+ k (n cos a
- e
sin a). (31)
Теперь, используя (29) и (31),
получаем
J1 e
cos a + v sin a;
g1 cos -
v cos a
- e
sin a. (32)/
Из выражений (32) нетрудно
получить следующие
J1
sin a +
g1 cos J
cos a; J1
cos a -
g1 cos J
sin a. (33)
Если далее воспользоваться
формулой (16) и полагать углы е
и н малыми, то для
погрешности в определении курсового угла светила, обусловленной погрешностями
горизонтирования платформы, можно получить следующее выражение:
d2aк
v tg
(h - e)
= (J1
sin a +
+ g1
cos J cos a)
tg (h -
J1 cos a
+ g1 cos J
sin a)
, (34)
d2aк = (J1 sin a + g1 cos J cos a  . (35)
. (35)
Полагая, что
[1 + (J1
cos a - g1
cos J
sin a)
tg h]1 ≃
1 -
(J1
cos a - g1
cos J
sin a)
tg h,
формулу (35) можно представить в
виде следующего приближения
d2 aк = (J1
sin a
+ g1
cos J
cos a)
tg h. (36)
Полная погрешность в
определении курсового угла светила
daк
=
d1aк
+
d2
. (37)
В том случае, когда датчик
курсовых углов светила устанавливается на корпусе самолета и в показания
датчика углов ДУa вносится поправка на погрешность,
вызванную отклонением оси вращения фотоголовки от вертикали, имеет место
погрешность d3aк,
обусловленная неточным вычислением величины й
оправки.
Выражение для оценки этой погрешности получим следующим путем.
Пусть поправка вычисляется' на
основе выражения
 = tgh1sinn1 , (38)
= tgh1sinn1 , (38)
где h1
- вычисленное в сферанте значение угла высоты
светила;
n1 -
угол отклонения маятника.
Истинное значение поправки
определяется выражением
 . (39)
. (39)
Погрешность в вычислении поправки
будет
d3 a =  - a. (40)
- a. (40)
Если полагать, что
n1 = n
+
dn;
h1 = h
+ dh,
и принять углы dn,
dh
и
e
малыми,
то
 , (41)
, (41)
где dn - погрешность, обусловленная
использованием маятника как датчика вертикали;
Величина dh определяется
по (23) либо по (24).
Если принять, что
[1 + (e +dh) tgh]-1 ≃ 1- (e +dh tgh) ,
то формулу (41) можно свести к виду
d3aк
= dn
tgh. (42)
Полная погрешность в
определении курсового угла светила в этом случае определится так:
daк = d1aк
+ d3aк. (43)
Литература
И.А. Гончаров. Основы любительской GPS-навигации.
- М.: Горячая Линия - Телеком, 2007. - 128 с.
Г.П. Астафьев, В.С. Шебшаевич, Ю.А. Юрков.
Радиотехнические средства навигации летательных аппаратов. - М.: Советское
радио, 1962. - 962 с.
М.М. Бирюкович, М.Я. Букшпун. Судовая
радиолокационная станция "Нептун". - М.: Морской транспорт, 1957. -
204 с.
Г.Д. Соненберг. Радиолокационные и навигационные
системы. - М.: Судостроение, 1982. - 400 с.
В.И. Шатров. Устройство и управление маломерным
судном. - М.: ТрансЛит, 2006. - 128 с.
Г.Н. Поникаровский, Е.П. Глебов. Корабельные
навигационные приборы. - М.: Издание Управления начальника Гидрографической
службы ВМФ, 1957. - 688 с.
В.П. Селезнев. Навигационные устройства. - М.:
Государственное издательство оборонной промышленности, 1961. - 616 с.
Б.В. Булгаков. Прикладная теория гироскопов. -
М.: Государственное издательство технико-теоретической литературы, 1955. - 356
с.
Д.С. Михайлов, И.Т. Дорофеев.
Электронавигационные приборы. - М.: Государственное издательство водного
транспорта, 1953. - 416 с.
А.И. Белоус, В.А. Емельянов, А.С. Турцевич.
Основы схемотехники микроэлектронных устройств. - М.: Техносфера, 2012. - 472
с.
Приложение.
Рисунки к разделам
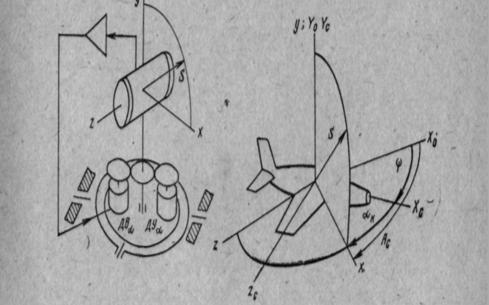
Рис. 1 Иллюстрация принципа действия
горизонтального астрокомпаса
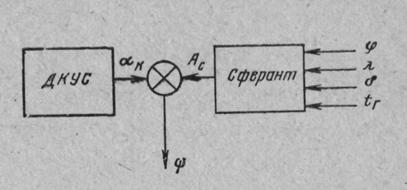
Рис. 2. Функциональная схема горизонтального
астрокомпаса
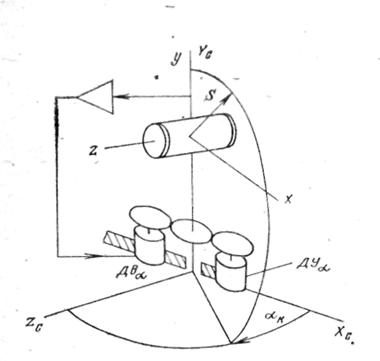
Рис. 3. Схема установки плоскостного пеленгатора
на корпусе
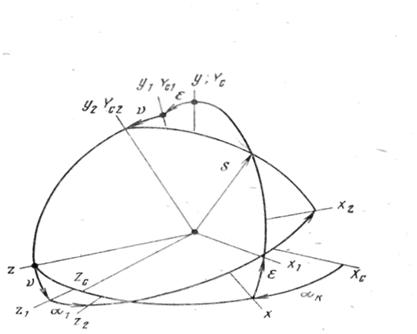
Рис. 4. Взаимное положение самолетного
трехгранника и трехгранника фотоголовки