Механизмы поперек-стругального верстата
Содержание
1. Определение момента инерции маховика по заданному
коэффициенту неравномерности движения
.1 Исходные данные
1.2 Синтез кинематической схемы рычажного механизма
1.3 Построение плана положений механизма
1.4 Построение планов скоростей
1.5 Определение приведенного момента сил сопротивления и сил
тяжести Мспр
1.6 Построение графика приведенного момента сил сопротивления
1.7 Построение графиков работы сил сопротивления и сил движущих
и сил движущих
1.8 Построение графика постоянного приведенного момента сил
движущих
1.9 Построение графика приращения кинетической энергии механизма (
(
1.10 Определение значений приведенного момента инерции рычажного механизма
1.11 Построение диаграммы "энергия - масса" DЕ(Iп)
1.12 Определение момента инерции маховика
1.13 Расчет маховика
1.14 Определение истинных значений угловой скорости w1и углового ускорения e1
2. Динамический анализ механизма
2.1 Построение планов положений и скоростей
2.2 Построение плана ускорений для положения № 2
.3 Структурный анализ механизма
.4 Определение системы сил, действующих на звенья механизма
.5 Силовой расчёт
механизма в положении № 2
2.6 Силовой расчёт механизма в положении № 9
3. Кинематический и геометрический синтез комбинированной
зубчатой передачи
.1 Исходные данные
.2 Синтез планетарного механизма
.3 Расчёт основных параметров внешнего эвольвентного
зацепления
.4 Построение схемы зацепления
. Динамический синтез кулачкового механизма
.1 Исходные данные
.2 Построение кинематических диаграмм движения коромысла
.3 Определение минимального радиуса кулачка
.4 Построение профиля кулачка
Список литературы
. Определение момента инерции маховика по заданному коэффициенту
неравномерности движения
маховик рычажный зубчатый передача
Определение момента инерции маховика выполним графоаналитическим методом
профессора Виттенбауера.
1.1 Исходные данные
Межцентровое расстояние О2О3 =70 мм
Ход ползуна H= 250 мм
Коэффициент изменения скорости хода КV = 2
Относительный
размер  0,45;
0,45; 3;
3;  0,5
0,5
Координаты, определяющие положение точки S5 и линию действия силы FПС
а = 230мм, в=100мм
Массы звеньев механизма m3= 70кг,m4= 9кг,m5
= 160кг
Осевой
момент инерции кулисы  0,05кг ∙м2;
0,05кг ∙м2; 0,11кг ∙м2
0,11кг ∙м2
Коэффициент
неравномерности движения кривошипа d = 1/25 =
0,04
Частота вращения электродвигателя nДВ = 5400об/мин
Общее передаточное отношение привода iН5 = 132
Сила полезного сопротивления FПС = 800H
1.2 Синтез кинематической схемы рычажного механизма
Определяем длину кулисы

Находим длину кривошипа
Определяем
длину шатуна ВС

И
положение точки S3 на звене
3

Определяем частоту вращения кривошипа

1.3
Построение плана положений механизма
Методом засечек строим план механизма для 12 равноотстоящих положений
кривошипа. Принимаем длину кривошипа на чертеже (О2А) = 70мм и
определяем масштабный коэффициент плана положений

1.4 Построение планов скоростей
Определяем угловую скорость кривошипа
 c-1
c-1
Скорости точекА1 и А2 обозначим Va1а2
 4,3∙0,14
= 0,602м/с
4,3∙0,14
= 0,602м/с
 направление
вектора в сторону
направление
вектора в сторону 
Принимаем
длину вектора, изображающего скорость точки А на планах скоростей равной (рvа1а2)
= 70 мм и определяем масштабный коэффициент планов скоростей
 мс-1/м
мс-1/м
Скорость точкиА3 определяется векторным уравнением

Длину
вектора скорости точки В определим по теореме подобия
Где
О3В и О3А− отрезки плана положений, мм.
Длину
вектора скорости точки S3определим
по теореме подобия
Скорость
точки В5 определяется векторным уравнением

По
записанным векторным уравнениям строим 12 планов скоростей механизма.
Описание построения планов скоростей.
От произвольно выбранной точки pv - пoлюса
плана скоростей отстраиваем вектор (pvа12) длиной 70 мм перпендикулярно звену ( О2А
). Через точку а12проводим прямую параллельную звену ( ВО3
), а через полюс pv
проводим прямую перпендикулярную ( ВО3 ) и на пересечении этих двух
прямых получаем точку а3. По теореме подобия определяем длину
вектора (pvв3)
и строим точку в3. Аналогично определяем длину вектора (pvs3) и отмечаем точку S3.
Через полюс pv проводим
горизонтальную прямую, а через точку в3 проводим вертикальную прямую
и на пересечении этих двух прямых получаем в5.
Это построение выполняем 12 раз для всех расчётных положений механизма.
Из планов скоростей определяем скорости точек и угловые скорости звеньев
механизма по формулам.

Из построенных планов скоростей определяем скорости точек и угловые
скорости звеньев механизма
Для всех положений
 .
. .
.
 .
. .
.
 .
. .
.
Положение № 0
 .
.
 .
.
 .
.
 .
.

 .
.
Положение №1
 .
.
 .
.
 .
.
 .
.

 .
.
Положение №2
 .
.

 .
.
 .
.
 .
.

 .
.
Положение №3
 .
.

 .
.
 .
.
 .
.

 .
.
Положение №4
 .
.
.
 .
.
.

 .
.
Положение №5
.
.
.
.

 .
.
Положение №6
.
.
.
.

 .
.
Положение №7
.
.
.
.

 .
.
Положение №8
.
.
.
.
.
Положение №9
 .
.
 .
.
 .
.
 .
.

 .
.
Положение №10
 .
.
 .
.
 .
.
 .
.

 .
.
Положение №11
Результаты этих и остальных расчётов представляем в таблице 1.
Таблица 1 Длины векторов планов скоростей, скорости точек и угловые скорости
звеньев механизма
1.5 Определение приведенного момента сил сопротивления и сил тяжести Мспр
Для определения момента Мспр воспользуемся
"рычагами" Жуковского, при помощи которых сначала найдем величину и
направление уравновешивающей силы `FУ.
Определяем силы тяжести звеньев механизма по формуле
Где  м/с2- ускорение силы тяжести
м/с2- ускорение силы тяжести
|
G3 = 70∙ 10 = 700; G4 = 9∙ 10 = 90
H;
|
G5 = 160 ∙ 10 = 1600 H;
|
Строим диаграмму сил резания Fmax (H) . Принимаем
максимальную величину ординаты диаграммы  = 25 мм и определяем масштабный коэффициент диаграммы по оси
ординат
= 25 мм и определяем масштабный коэффициент диаграммы по оси
ординат
 = 32Н/мм
= 32Н/мм
Поворачиваем
все внешние силы на 90о в одну и туже сторону и прикладываем их к
планам скоростей в отображающих точках. Получим "рычаги" Жуковского.
Составляем уравнение равновесия "рычагов" относительно полюса Р и
находим величину уравновешивающей силы  во всех
положениях механизма.
во всех
положениях механизма.


Знак
правой части уравнений укажет направление уравновешивающей силы `FУ.
Составляем
эти уравнения для всех расчетных положений механизма и определяем значения
уравновешивающей силы Fу
0) Fу · 70 ‒ G3 28 + G4 31,5 = 0
Fу = (700·28 ‒ 90·31,5)/70 = 239,5 Н
) Fу · 70 ‒ G3 20 + G4 22,4 = 0
Fу = (700·20 ‒ 90·22,4)/70 = 171,2 Н
)
Fу · 70 ‒
G3 13 + G4 14,4 - Fпс 26 = 0
Fу = (700·13 ‒ 90·14,4 + 800·26)/70 = 408,6 Н
)
Fу · 70 ‒
G3 6,5 + G4 7,2 - Fпс 35 = 0
Fу = (700·6,5 ‒ 90·7,2 + 800·35)/70 = 455,7 Н
)
Fу · 70 ‒
Fпс 42 = 0
Fу = 800·42 / 70 = 480 Н
)
Fу · 70 + G3 6,5 ‒ G4 7,2 - Fпс 44 = 0
Fу = (‒700·6,5 + 90·7,2 + 800·44)/70 = 447,1 Н
)
Fу · 70 + G3 13 ‒ G4 14,4 - Fпс 41 = 0
Fу = (‒700·13 + 90·14,4 + 800·41)/70 = 474,2 Н
)
Fу · 70 + G3 20 ‒ G4 22,4 - Fпс 29 = 0
Fу = (‒700·20 + 90·22,4 + 800·29)/70 = 160,2 Н
)
Fу · 70 + G3 28 ‒ G4 31,5 = 0
Fу = (‒700·28 + 90·31,5)/70 = ‒239,5 Н
)
Fу · 70 + G3 34 ‒ G4 37,5 = 0
Fу = (‒700·34 + 90·37,5)/70 = ‒291,8 Н
)
Fу · 70 = 0
Fу = 0 Н
)
Fу · 70 ‒
G3 34 + G4 37,5 = 0
Fу = (700·34 ‒ 90·37,5)/70 = 291,8 Н
Результаты всех этих расчётов заносим в таблицу № 2
При
этом учитываем, что приведённая сила  равна и
противоположно направлена уравновешивающей силе `FУ,
равна и
противоположно направлена уравновешивающей силе `FУ, 
Таблица 2 Значения приведённой силы Fп и приведённого момента сил
сопротивления МСПР
|
№ положения
|
Fп= − Fу
|

|
μм
|
Ордината графика
|
|
|
Н
|
Нм
|
(Нм)/ мм
|
мм
|
|
0
|
-239,5
|
-33,5
|
1
|
33,5
|
|
1
|
-171,2
|
-24
|
|
24
|
|
2
|
-408,6
|
-57,2
|
|
57,2
|
|
3
|
-455,7
|
-63,7
|
|
63,7
|
|
4
|
-480
|
-67,2
|
|
67,2
|
|
5
|
-447,1
|
-62,6
|
|
62,6
|
|
6
|
-474,2
|
-66,4
|
|
66,4
|
|
7
|
-160,2
|
-22,4
|
|
22,4
|
|
8
|
239,5
|
33,5
|
|
-33,5
|
|
9
|
291,8
|
40,9
|
|
-40,9
|
|
10
|
0
|
0
|
|
0
|
|
11
|
-291,8
|
-40,9
|
|
40,9
|
Определяем
величину приведенного момента сил сопротивления и сил тяжести  , например для положения №1
, например для положения №1

Результаты
остальных расчетов заносим в таблицу 2.
Знак
"минус" означает, что направление момента противоположно направлению угловой скорости кривошипа
 .
.
1.6 Построение графика приведённого момента сил сопротивления
Принимаем максимальную ординату графика = 84 мми определяем масштабный
коэффициент графика по оси ординат
= 84 мми определяем масштабный
коэффициент графика по оси ординат
Принимаем длину отрезка, изображающего один оборот кривошипа на оси  , равной l = 180мми
определяем масштабный коэффициент по оси
, равной l = 180мми
определяем масштабный коэффициент по оси
 рад /мм
рад /мм
По данным таблицы 2 строим график, при построении графика отрицательные
значения будем считать положительными, а положительные значения отрицательными.
.7 Построение графиков работы сил сопротивления и сил движущих
Графически интегрируя график строим график работы сил
сопротивления . Соединив прямой линией начальную и конечную точки графика получаем график работы сил движущих
. Соединив прямой линией начальную и конечную точки графика получаем график работы сил движущих , такое построение возможно,
поскольку работа сил движущих равна работе сил сопротивления за полный цикл
работы механизма. Определяем масштабные коэффициенты построенных графиков работ
, такое построение возможно,
поскольку работа сил движущих равна работе сил сопротивления за полный цикл
работы механизма. Определяем масштабные коэффициенты построенных графиков работ
 = 0,035 ∙ 1 ∙70 = 2,45 Дж/мм.
= 0,035 ∙ 1 ∙70 = 2,45 Дж/мм.
где Н = 70 мм - полюсное расстояние выбранное
при графическом интегрировании.
.8 Построение графика постоянного приведённого момента сил движущих
Графическим дифференцированием графика получаем график в виде примой линии параллельной оси , и определяем его значение
в виде примой линии параллельной оси , и определяем его значение

где = 34,4мм - ордината графика.
= 34,4мм - ордината графика.
.9 Построение графика приращения кинетической энергии механизма (
(
Путём графического вычитания ординат графиков
 (
(
строим график приращения кинетической энергии(.
Масштабный коэффициент графика Дж /мм
Дж /мм
1.10 Определяем значения приведенного момента инерции рычажного механизма
по формуле

где: массы звеньев механизма
m3
=70кг, m4 = 9 кг, m5 = 160 кг.
Осевые моменты инерциизвеньев: = 0,05 кг∙м2,
= 0,05 кг∙м2,  = 0,11 кг∙м2.
= 0,11 кг∙м2.
Значения скоростей  и угловых скоростей
и угловых скоростей  берем из таблицы 1.
берем из таблицы 1.
Угловая скорость кривошипа: = 4,2 с-1
Положение № 0

Положение № 1

Положение № 2

Положение № 3

Положение № 4

Положение № 5

Положение № 6

Положение № 7

Положение № 8

Положение № 9

Положение № 10

Положение № 11

Результаты всех этих расчетов заносим в таблицу 3.
Таблица 3 Значения приведённого
моментаинерциимеханизмаIп
|
№ положения
|
Iп
|
Ордината графика
|
|
кг·м2
|
(кг·м2)/мм
|
мм
|
|
0
|

|
0,1
|
3,3
|
|
1
|

|
|
3,9
|
|
2
|

|
|
6,3
|
|
3
|

|
|
1
|
|
4
|

|
|
13,7
|
|
5
|

|
|
14,9
|
|
6
|

|
|
13,3
|
|
7
|

|
|
7,8
|
|
8
|
|
|
3,3
|
|
9
|

|
|
41,3
|
|
10
|

|
|
122
|
|
11
|

|
|
15,8
|
Для построенияграфикаIп () задаемся максимальной величиной ординаты графика = 122 мм и определяем маштабній
коєффициент графика по оси ординат
= 122 мм и определяем маштабній
коєффициент графика по оси ординат

И строим график приведённого момента инерции механизма по значениям из
таблицы 3, расположив его ось вертикально для удобства дальнейших построений.
.11 Построение диаграммы "энергия - масса" DЕ(Iп)
Графически исключая параметр из графиков и
и строим диаграмму "энергия -
масса"
строим диаграмму "энергия -
масса"  .
.
.12 Определение момента инерции маховика
Для определения момента инерции маховика нужно провести касательные к
диаграмме .
Определяем углы касательных по формуле:

Угол верхней касательной
 мах = arctg
(0,5 ∙ 0,1 ∙ 4,22 ( 1+ 0,04)/2,45) = 20,530
мах = arctg
(0,5 ∙ 0,1 ∙ 4,22 ( 1+ 0,04)/2,45) = 20,530
Угол нижней касательной
мin = arctg
(0,5 ∙ 0,1 ∙ 4,22 ( 1- 0,04)/2,45) = 19,070
Проводим касательные и находим длину отрезка ( kl ), отсекаемого ими на оси DЕ диаграммы "энергия - масса"
( kl) = 43мм
Искомый момент инерции маховика

1.13 Расчёт маховика
Выбираем место для установки маховика - вал электродвигателя и определяем
необходимый для этого момент инерции маховика
 кг ∙ м2
кг ∙ м2
выбираем конструкцию маховика - стальной обод
Задаемся средним радиусом обода r = 0,14м
Определяем массу обода

Задаёмся высотой сечения обода h = 0,06ми определяем ширину обода

где  = 7850 кг/м3- плотность стали
= 7850 кг/м3- плотность стали
проверяем окружную скорость маховика
 96м/с
96м/с 95м/с
95м/с
Где м/с - допускаемое
значение окружной скорости для стального маховика из условия прочности
материала маховика, нагруженного центробежными инерционными силами.
м/с - допускаемое
значение окружной скорости для стального маховика из условия прочности
материала маховика, нагруженного центробежными инерционными силами.
Определяем массу маховика с учётом спиц ступицы
mм= 1,3·mоб= 1,3·51,8 =67,34 кг
.14 Определение истинных значений угловой скорости w1 и углового ускорения e1
Определяем истинные значения угловой скорости и углового ускорения
кривошипа в положениях № 2и № 9, выбранных для силового расчёта


где YК = 0,2мм - ордината пересечения верхней касательной с
осью DЕ диаграммы "энергия -
масса" с учётом знака.
yΔЕi- соответствующая положению ордината графика
приращения кинетической энергии механизма.
Интервал значений угловой скорости кривошипа при заданном коэффициенте
неравномерности движения d = 1/25 = 0,04


Определяем угловое ускорение кривошипа


2. Динамический анализ механизма
2.1 Построение планов положений и скоростей
Изображаем механизм в положениях № 2 и 9, выбранных для силового расчёта.
По вычисленным значениям  1
и
1
и  1 строим планы скоростей и ускорений. Построение планов
скоростей описано в разделе 1.
1 строим планы скоростей и ускорений. Построение планов
скоростей описано в разделе 1.
Уточняем масштабные коэффициенты планов скоростей:
 ‒ для положения № 2
‒ для положения № 2
 ‒ для положения №9
‒ для положения №9
.2 Построение плана ускорений для положения № 2
Нормальные ускорения точек А1 и А2
 м/с2
м/с2

Тангенциальное
ускорение точек А1 и А2
 м/с2
м/с2

Принимаем длину вектора нормального ускорения точек А1А2
(раа1а2) = 80мм и определяем масштабный
коэффициент плана ускорений

Ускорение
точки А3 определяется векторным уравнением
В
котором модуль ускорения Кориолиса

Направление этого вектора находим поворотом вектораVA3A2 на 90° по
направлению w3.
Нормальное ускорение точки А3


Длину вектора ускорения точки В3 определим по теореме подобия
 = 60 мм.
= 60 мм.
Длину
вектора ускорения точки S3 определим
по теореме подобия
 0,45·60 =
27мм
0,45·60 =
27мм
Ускорение
точки С определяется векторным уравнением

В
котором ускорение точки С относительно точки В

По
записанным векторным уравнениям строим план ускорений механизма. Из плана
ускорений определяем ускорения точек и угловые ускорения звеньев механизма
аs3 = ( раs3 )mа =27∙ 0,02 = 0,54
аs4 = ( раs4 )mа = 40,3∙ 0,02 = 0,806
аs5 = аС =( рас )mа = 32,6 ∙ 0,02 = 0,652




План ускорений для положения № 9строится аналогично, а его масштаб

Результаты остальных вычислений заносим в таблицу 2.1.
Таблица 2.1
|
№ пол.
|
aS3 м/с2
|
aS4 м/с2
|
aS5,aC м/с2
|
atA3 м/с2
|
atCB м/с2
|
e1 с-2
|
e3 с-2
|
e4 с-2
|
|
2
|
0,54
|
0,806
|
0,652
|
0,4
|
1,05
|
0,22
|
2,15
|
2,8
|
|
9
|
2,475
|
5,98
|
6,45
|
1,82
|
0,52
|
0,66
|
21,2
|
1,39
|
2.3 Структурный анализ механизма
Механизм состоит из двух структурных групп Л.В. Ассура
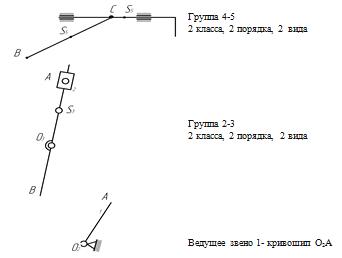
Число подвижных звеньев механизма n = 5
Число кинематических пар 5 класса p5= 7
Определяем степень подвижности механизма
W = 3n ‒ 2p5 = 3×5 ‒ 2×7 = 1
Поскольку механизм содержит только структурные группы 2 класса, то он
относится к механизмам 2 класса.
2.4 Определение системы сил, действующих на звенья механизма
Силы тяжести звеньев уже определены
3
= 700 НG4 = 90 НG5 = 1600 Н
Определяем еще силу тяжести маховика

Силы инерции звеньев определим по формуле

|
Положение № 2
|
Положение № 10
|
|

|

|
|

|

|
|

|

|
Моменты пар сил инерции определим по формуле
Положение № 2



Положение № 10



Сила резания

2.5 Силовой расчёт механизма в положении № 2
Силовой расчет группы 4-5
Отделяем группу 4-5 от механизма и загружаем внешними силами.
Нарушенную в точке В связь заменяем реакциейR34, которая неизвестна ни по величине ни по направлению,
поэтому раскладываем её на составляющие параллельно оси звена и перпендикулярно
ей:
Для определения составляющей`Rτ34 составляем векторное уравнение
равновесия сил, действующих на звено 4 относительно точки С

откуда

Буквами hu4 и h4, обозначены плечи соответствующих
сил, показанные на чертеже, мм.
Составляем векторное уравнение равновесия сил, действующих на всю группу
4-5

Для
определения внутренней реакции R54 в точке
С составляем векторное уравнение равновесия сил, действующих на звено 4.

Принимаем
масштабный коэффициент сил mF =10 Н/мм, и строим план сил группы 4-5 по записанным
векторным уравнениям
Из плана сил определяем реакции в кинематических парах структурной
группы:




Для определения точки приложения реакции `R05 составляем уравнение равновесия моментов сил, действующих на
звено 5 относительно точки C


Показываем реакцию `R05 с плечом X05 на чертеже.
Силовой расчёт группы 2 - 3
Определению подлежат реакции `R23 в точке А
и `R03 в точке О3.
Реакция `R23 приложена в точке А^О3А.
Чтобы определить реакцию `R23 составляем уравнение равновесия
моментов сил, действующих на звено 3, относительно точки О3


Чтобы определить реакцию в точке О3составляем векторное
уравнение равновесия сил, действующих на звено 3.

Принимаем масштабный коэффициент сил mF= 10 Н/мм и строим план сил звена 3 по записанному векторному уравнению,
отстраивая последовательно векторы R23,R43,G3, FИ3, каждый последующий вектор из конца
предыдущего.
Из плана сил определяем реакцию в стойке О3

Поскольку звено 2 не нагружено, то из рассмотрения его равновесия следует
что

Откуда следует, что
Силовой расчёт ведущего звена
Считаем, что вращение передаётся кривошипу через муфту. Составляем
уравнение равновесия моментов сил, действующих на кривошип О2А
относительно точки О2.

откуда
находим уравновешивающий момент уравновешивающую силу
Мур=
550 ∙ 66,1 ∙ 0,002 - 32,8= 39,91 Н∙мFур =
Составляем
векторное уравнение равновесия сил, действующих на кривошип
троим
план сил ведущего звена, mF= 10
Находим
реакцию в стойке О2 :R01= 96,4 ∙
10 = 964 Н.
Определение уравновешивающей силы Fур при помощи "рычага" Н. Е. Жуковского. Моменты пар
сил инерции Миi представляем парами сил Fмi с плечом,
равным длине соответствующего звена
Прикладываем все внешние силы и силы Fмi к повернутому на 90° плану скоростей в отображающих
точках. Получили "рычаг" Жуковского. Составляем уравнение равновесия
моментов сил относительно полюса Р и находим величину уравновешивающей силы Fур



Определяем уравновешивающий момент
МУР = FУР
×lо2А = 210,88 ∙ 0,14
= 29,5232 Н ∙ м
Сравниваем результаты
Силовой
расчёт дал  = 29,5232 Н ∙ мFур =
= 29,5232 Н ∙ мFур =
"Рычаг"
Жуковского дал  =29,5262 Н ∙ мFур =
=29,5262 Н ∙ мFур =
определяем
погрешность

2.6 Силовой расчёт механизма в положении № 9
Силовой расчет группы 4-5
Отделяем группу 4-5 от механизма и загружаем внешними силам
Нарушенную в точке В связь заменяем реакциейR34, которая неизвестна ни по величине ни по направлению,
поэтому раскладываем её на составляющие параллельно оси звена и перпендикулярно
ей:
Для определения составляющей`Rτ34 составляем векторное уравнение
равновесия сил, действующих на звено 4 относительно точки С


Буквами hu4 и h4, обозначены плечи соответствующих
сил, показанные на чертеже,
мм.
Составляем векторное уравнение равновесия сил, действующих на всю группу
4-5
Для определения внутренней реакцииR54 в точке С составляем векторное уравнение равновесия сил,
действующих на звено 4.
Принимаем
масштабный коэффициент сил mF = 10 Н/мм, и строим план сил группы 4-5 по записанным
векторным уравнениям
Из плана сил определяем реакции в кинематических парах структурной
группы:




Для определения точки приложения реакции `R05 составляем уравнение равновесия моментов сил, действующих на
звено 5 относительно точки C


Показываем реакцию `R05 с плечом X05 на чертеже
Силовой расчёт группы 2 - 3
Определению подлежат реакции `R23 в точке А
и `R03 в точке О3.
Реакция `R23 приложена в точке А^О3А.
Чтобы определить реакцию `R23 составляем уравнение равновесия
моментов сил, действующих на звено 3, относительно точки О3


Чтобы определить реакцию в точке О3 составляем векторное
уравнение равновесия сил, действующих на звено 3.

Принимаем масштабный коэффициент сил mF=10 Н/мм и строим план сил звена 3 по записанному векторному уравнению,
отстраивая последовательно векторы R23,R43,G3, FИ3, каждый последующий вектор из конца
предыдущего.
Из плана сил определяем реакцию в стойке О3
R03= 226,7 ∙ 10 = 2267 Н
Поскольку звено 2 не нагружено, то из рассмотрения его равновесия следует
что
Откуда
следует, что
12=-R32=932 Н
Силовой расчёт ведущего звена
Считаем, что вращение передаётся кривошипу через муфту. Составляем
уравнение равновесия моментов сил, действующих на кривошип О2А
относительно точки О2

откуда
находим уравновешивающий момент уравновешивающую силу
Мур=
932 ∙ 64 ∙ 0,002 -98,5 = 20,8 Н ∙ мFур =
Составляем
векторное уравнение равновесия сил, действующих на кривошип
троим
план сил ведущего звена, mF=10
Н/мм
Находим
реакцию в стойке О2 : R01= 41,8 ∙
10 = 418 Н.
Определение
уравновешивающей силы Fур при помощи "рычага" Н. Е. Жуковского
Моменты
пар сил инерции Миi представляем парами сил Fмi
с плечом, равным длине соответствующего звена
Прикладываем все внешние силы и силы Fмi к повернутому на 90° плану скоростей в отображающих
точках. Получили "рычаг" Жуковского. Составляем уравнение равновесия
моментов сил относительно полюса Р и находим величину уравновешивающей силы Fур.



Определяем уравновешивающий момент
МУР = FУР
×lо2А = 148,3∙ 0,14 =
20,77 Н ∙ м
Сравниваем результаты
Силовой
расчёт дал = 20,8Н ∙ мFур =
"Рычаг"
Жуковского дал =20,77Н ∙ мFур =
определяем
погрешность

3.
Кинематический и геометрический синтез комбинированной зубчатой передачи
3.1
Исходные данные
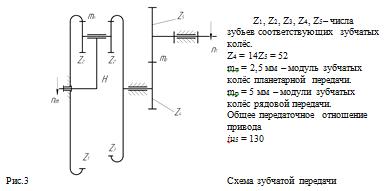
3.2
Синтез планетарного механизма
Числа
зубьев зубчатых колёс планетарной передачи должны удовлетворять следующим
условиям:
·
получение
заданного передаточного отношения
·
обеспечения
соосности передачи
·
обеспечения
соседства сателлитов и условия сборки передачи
·
отсутствия
подреза, заклинивания и интерференции зубьев.
Определяем передаточное отношение планетарной передачи при
остановленном колесеZ1

Числами зубьев всех колес задаёмся
Z1=51
Z2=21
Z2¢=20
Z3=50
Определяем фактическое передаточное отношение при полученных числах
зубьев
Отклонение
от требуемого

Проверяем
условие соосности
3 = Z1 - Z2 + Z2′
=
51 - 21 + 20=50
По
условию соседства определяем максимально возможное число сателлитов Kmax

Значит
можно поставить не более 3сателлитов
Проверяем
условие сборки
Z2·Z3 +Z1·Z2′ = C·K·χ
21 50 - 51 20 = 30 = 10 3 1 = 30
50 - 51 20 = 30 = 10 3 1 = 30
где
С = 10 ‒любое целое число
χ = 1 ‒ наибольший общий делитель чисел Z2 и Z2′
Определяем
делительные( начальные ) диаметры всех зубчатых колёс по формуле
i = m1×Zi
d1 = dw1 = mп×Z1 = 2,5×51=127,5 мм
d2 = dw2 =mп×Z2 = 2,5×21= 52,5 мм
d2¢ =
dw2′ = mп×Z2¢ = 2,5×20= 50 мм
d3 = dw3 = mп×Z3 = 2,5×50=125 мм
По полученным значениям
диаметров зубчатых колёс вычерчиваем кинематическую схему зубчатой передачи на
чертёжном листе в масштабе М 1:1
.3 Расчёт основных параметров
внешнего эвольвентного зацепления
Исходные данные:
Число зубьев шестерни Z4 = 14
Число зубьев колеса Z5 = 52
Модуль зацепления = 5 мм
= 5 мм
Межосевое расстояние аw=
165 мм
Условие выбора коэффициентов смещения - отсутствие подреза зубьев и
вписывание в заданное межосевое расстояние.
Определяем коэффициент смещения из условия не подрезания ножек зубьев
меньшего класса

Определяем угол зацепления в сборке

Определяем инволюту зацепления

Находим суммарный коэффициент смещения

Используя блокирующий контур выбираем коэффициенты смещения
4
= 0,44 Х5 = -0,44
Определяем основные размеры зубчатого зацепления
Окружной шаг по делительной окружности

Определяем радиусы окружностей зубчатых колес
Делительных
4
= 0,5mpZ4 = 0,5 ∙ 5 ∙14 = 35 мм
r5 = 0,5mpZ5 = 0,5 ∙ 5∙52 = 130 мм
Основных
rB4=
r4cos = 35 ∙ cos200 = 32,889мм
= 35 ∙ cos200 = 32,889мм
rB5=
r5cos = 130 ∙ cos200 = 122,16мм
Начальных


Впадин зубьев
f4
= r4-mp (1,25- х4) = 35 - 5 (1,25 - 0,44) = 30,95 мм
rf5
= r5-mp (1,25 - х5) = 130 - 5 (1,25 -(-0,44)) = 121,55 мм
Вершин зубьев
a4 =  -rf5- 0,25·mp = 165 - 121,55 - 0,25 ∙
5 = 42,2 ммa5 = - rf4- 0,25·mp
= 165 - 30,95 - 0,25 ∙ 5 = 132,8 мм
-rf5- 0,25·mp = 165 - 121,55 - 0,25 ∙
5 = 42,2 ммa5 = - rf4- 0,25·mp
= 165 - 30,95 - 0,25 ∙ 5 = 132,8 мм
Проверка
=  +
+ = 35 +130 = 165 мм
= 35 +130 = 165 мм

S4 = 0,5·P+2·X4mp = 0,5 ∙ 15,71 +2 ∙ 0,44 ∙
5∙tg200 = 9,455мм5 = 0,5·P+2·X5mp
= 0,5 ∙ 15,71 +2 ∙ 0,44 ∙
5∙tg200 = 9,455мм5 = 0,5·P+2·X5mp = 0,5 ∙ 15,71 +2 ∙
(-0,44) ∙ 5∙ tg200 = 6,253мм
= 0,5 ∙ 15,71 +2 ∙
(-0,44) ∙ 5∙ tg200 = 6,253мм
Коэффициент торцевого перекрытия

Полученное значение  = 1,5 означает, что одна пара зубьев находится в зацеплении
50 % времени, а 50% времени в зацеплении находятся две пары зубьев.
= 1,5 означает, что одна пара зубьев находится в зацеплении
50 % времени, а 50% времени в зацеплении находятся две пары зубьев.
По полученным данным строим схему эвольвентного зацепления
.4 Построение схемы зацепления
Выбираем масштаб построения М2,5:1. Проводим линию центров и откладываем
на ней межцентровое расстояние . Из центров О4 и О5 проводим радиусами и начальные окружности зубчатых колес,
касающиеся друг друга в точкеP.
Проводим общую касательнуюt-t к начальным окружностям и под углом к ней общую нормаль к профилям
зубьевn-n. Опускаем из центров О4 и О5
перпендикуляры на нормаль n-n. Основания перпендикуляров - точки А
и В.
к ней общую нормаль к профилям
зубьевn-n. Опускаем из центров О4 и О5
перпендикуляры на нормаль n-n. Основания перпендикуляров - точки А
и В.
РадиусамиО4А и О5Вравными в масштабе радиусам
основных окружностей проводим основные окружности. Проводим из центров О4
и О5 окружности выступов, впадин и делительные окружности зубчатых
колес.
Строим активную часть линии зацепленияa в.Точки а и в являются точками пересечения теоретической
линии зацепления АВ с окружностью выступов колёс.
АВ - теоретическая линия зацепления - участок касательной к основным
окружностям, заключённый между точками А и В.
ав - активная часть зацепления - участок теоретической линии зацепления,
заключенный между точками ее пересечения с окружностями вершин зубьев. Активная
часть линии зацепления является местом касания профилей зубьев.
Проверяем коэффициент перекрытия по чертежу.

где  = 55,2/2,5 = 22,08 мм - длина активного участка линии
зацепления, измеренная на чертеже с учетом масштаба построения.
= 55,2/2,5 = 22,08 мм - длина активного участка линии
зацепления, измеренная на чертеже с учетом масштаба построения.
Определяем значение коэффициентов удельного скольжения шестерни  и колеса
и колеса  по зависимостям
по зависимостям


где l - текущее значение расстояния от
начала линии зацепления, мм.
L=  - длина теоретической линии
зацепления.
- длина теоретической линии
зацепления.
Расчёт сделан для l = 6
мм, результаты остальных расчётов заносим в таблицу 3.1.
Таблица 3.1 Значения коэффициентов удельного скольжения шестерни λ1 и колеса λ2
|
l мм
|
0
|
4,3
|
6
|
8
|
AP
|
16
|
20
|
26,4
|
AB
|
|

|
-∞
|
-2,26
|
-1,26
|
-0,63
|
0
|
0,32
|
0,51
|
0,69
|
1
|
|

|
1
|
0,69
|
0,56
|
0,39
|
0
|
-0,47
|
-1,04
|
-2,26
|
-∞
|
По полученным данным строим графики коэффициентов удельного скольжения
шестерни и колеса  .
.

4. Динамический синтез кулачкового
механизма
4.1 Исходные данные
Длина коромысла lо4D = 0,12 м
Угол качания коромыслаβmax
= 18º
Минимальный угол передачи движения γmin=
45º
Угол фазы подъёмап = 55º
Угол фазы верхнего выстоявв = 0º
Угол фазы опусканияоп = 55º
Диаграмма ускоренияБ - постоянное ускорение (прямоугольник)
.2 Построение кинематических диаграмм движения коромысла
В левой верхней части листа строим график аналога углового ускорения
коромысла.с отношением ординат а1/а2 = . Задаёмся
величиной ординаты для построения графика У″п= 50мм.
Двукратным графическим интегрированием графикаβ″(j) строим график аналога угловой
скорости коромысла β′(j) и график углов поворота коромысла β (j).
Определяем масштабные коэффициенты построенных графиков

Где l= 220 мм ─ выбираемая
произвольно длина отрезка оси jизображающего сумму фазовых углов (jп+jвв+jОП)

где  = 86 мм - наибольшая ордината графика
= 86 мм - наибольшая ордината графика


Где Н1= 50 мм и Н2= 35 мм ─ полюсные
расстояния соответствующих графиков, выбранные при графическом интегрировании.
По графикуβ(j) определяем углы поворота коромысла.
Расчёт выполняем для положения № 1

где  = 2,9 мм - текущая ордината графика
= 2,9 мм - текущая ордината графика
Результаты остальных расчётов заносим в таблицу 4.1.
Определяем значения аналогов линейных скоростей центра ролика

где l= 0,12 м - длина коромысла.
 = 13,65 мм - ордината графика
= 13,65 мм - ордината графика .
.
Результаты остальных расчётов заносим в таблицу 4.1.
Таблица 4.1
|
№
|
 град град
|
 м м
|

|

|
|
0
|
0
|
0
|
81
|
9
|
|
1
|
0,6
|
0,019
|
66,5
|
23,5
|
|
2
|
2,3
|
0,038
|
56,7
|
33,3
|
|
3
|
5,1
|
0,057
|
51
|
39
|
|
4
|
9
|
0,076
|
48,3
|
41,7
|
|
5
|
12,9
|
0,057
|
61,6
|
28,4
|
|
6
|
15,7
|
0,038
|
75
|
15
|
|
7
|
17,4
|
0,019
|
88
|
2
|
|
8
|
18
|
0
|
-81
|
-9
|
|
9
|
17,4
|
0,019
|
-71,3
|
-18,7
|
|
10
|
15,7
|
0,038
|
-62,7
|
-27,3
|
|
11
|
12,9
|
0,057
|
-55
|
-35
|
|
12
|
9
|
0,076
|
-47,2
|
-42,8
|
|
13
|
5,1
|
0,057
|
-55
|
-35
|
|
14
|
2,3
|
0,038
|
-66,3
|
-23,7
|
|
15
|
0,6
|
0,019
|
-81,7
|
-8,3
|
|
16
|
0
|
0
|
81
|
9
|
.3 Определение минимального радиуса кулачка
Для определения минимального радиуса кулачка строим диаграмму S¢(β). Принимаем длину коромысла на чертеже
(О4D) = 120 мм и определяем масштабный
коэффициент построения

Значения  и
и  берем из таблицы 4.1.
берем из таблицы 4.1.
При построении диаграммы значения S′ для фазы подъёма откладываем от точек D в сторону центра вращения коромысла,
поскольку коромысло и кулачок вращаются в одну сторону.
От конечных точек диаграммы S′(β) проводим лучи под углами gmin = 45°‒ [J] = 90 ‒
и выбираем центр вращения кулачка О2 внутри заштрихованной
области.
Определяем минимальный радиус кулачка

Соединяем центр вращения кулачка О2 с точками диаграммы S′(β) и измеряем острые углы giи заносим результаты измерений в
таблицу 4.1.
Определяем углы давления  i по формуле i = 90° ‒ gi
например при
i по формуле i = 90° ‒ gi
например при  = 510
= 510 = 90° ‒ 51 = 390
= 90° ‒ 51 = 390
Результаты остальных расчётов заносим в таблицу 4.1
Строим график изменения угла давленияa(j)

.4 Построение профиля кулачка
Методом обращения движения строим центровой профиль кулачка. Суть метода
заключается в том, что кулачок условно считается неподвижным, а коромысло со
стойкой движется вокруг него с угловой скоростью ‒wК.
Визуально находим участок профиля с минимальным радиусом кривизны и
графически определяем его значение
 мм
мм
Определяем радиус ролика по условиям
rp = 0,8 = 0,8 ∙ 37 = 29,6 мм
= 0,8 ∙ 37 = 29,6 мм
rp = 0,4 = 0,4 ∙ 65 = 26 мм
= 0,4 ∙ 65 = 26 мм
Для дальнейших построений выбираем меньшее из двух получившихся значений
rp=26
мм
Строим рабочий профиль кулачка как огибающую семейства окружностей с
радиусом rр, центры которых лежат на центровом
профиле кулачка.
Список литературы
1. Артоболевский И.И.Теория механизмов машин.- М.: Наука,
1988.-640с.
. Артоболевский И.И., Эдельштейн Б.В. Сборник задач по теории
механизмов и машин.- М.:Наука,1973.-265с.
. Курсовое проектирование по теории механизмов и машин/
А.С.Кореняко, Л.И.Крементейн , С.Д. Петровский и др.-М. Высш. шк., 1970.-332с.
. Мотулько Б.В., Гутиря С.С. Теория механизмов и машин.
Проектування.-Одеса:Феникс,2005.-182с.