Автоматизация раздачи кормов кормораздатчиком Р-3000М
Введение
технологический
автоматизация схема электрический
Автоматизация
технологических процессов - это этап комплексной механизации, характеризуемый
освобождением человека от непосредственного выполнения функций управления
технологическими процессами и передачей этих функций автоматическим
устройствам. При автоматизации технологические процессы получения,
преобразования, передачи и использования энергии, материалов и информации
выполняются автоматически при помощи специальных технических средств и систем управления.
Существенными
тенденциями современного сельскохозяйственного производства являются, с одной
стороны, постоянный рост его масштабов, повышение количества и качества
сельскохозяйственных продуктов, с другой - прогрессирующий дефицит рабочей
силы, растущая непопулярность монотонного и тяжелого физического ручного труда
в полеводстве и животноводстве. Важнейшим, а зачастую и единственным средством
разрешения противоречий между ними является комплексная механизация и
автоматизация производства.
Одним из самых важных этапов в
развитии животноводства наряду с кормоприготовлением и навозоудалением является
раздача кормов. На сегодняшний день промышленность выпускает большое количество
различных кормораздаточных устройств, причем как стационарных, так и мобильных.
Задачами данного курсового проекта
является разработка схемы автоматизации, составление алгоритма управления,
разработка принципиальной электрической схемы, расчет и выбор элементов и
средств автоматизации, составление спецификации, расчет и выбор щитов
управления, разработка схем соединения и схем подключения, определение основных
показателей надежности системы, разработка мероприятий по электробезопасности
при эксплуатации электрической части объекта, а также написание выводов и
заключения.
1. Технологическая
характеристика проектируемого объекта
Готовый корм поступает в бункер
дозатора, в количестве, необходимом для разовой дачи поголовью свиней.
Раздаточная платформа при подаче корма совершает возвратно-поступательное
движение на расстояние, равное половине длины кормушек.
Когда платформа движется влево, на
нее поступает корм, скребки, подвешенные шарнирно, поворачиваются вверх и не
мешают продвижению платформы с кормом. При обратном движении платформы в левой
части кормушек опускаются скребки, задерживая и сбрасывая корм в кормушки. При
движении платформы вправо она также загружается кормом и аналогичным образом
разгружается правая часть кормушек.
Требования к схеме автоматизации:
. Предусмотреть работу схемы
в двух режимах: ручном и автоматическом.
. Движение раздаточной
платформы осуществляется после того, как корм начинает поступать с
разгрузочного транспортера.
. Реверсирование
электродвигателей раздаточной платформы осуществляется с помощью конечных
выключателей.
. Схема должна иметь предупредительную
сигнализацию.
Рисунок 1.1 - Технологическая схема
кормораздатчика Р-3000М
. Бункер дозатора.
. Транспортер дозатора.
. Выгрузной шнек.
. Загрузочный транспортер.
. Кормушка.
. Раздаточная платформа.
. Скребки.
Таблица 1.1 - исходные данные
|
Обозначение
|
Рабочая машина
|
Номинальная мощность двигателя Рн, кВт
|
|
M1
|
Загрузочный транспортер
|
1,5
|
|
M2
|
Выгрузной шнек транспортер дозатора
|
1,5
|
|
MЗ
|
Разгрузочная платформа
|
3,0
|
2.
Составление функциональной и технологической схем системы автоматического
управления
Схема автоматизации
выполняется следующим образом: щит или пульт управления изображают
прямоугольным в верхней или нижней части чертежа, в котором, при помощи
условных обозначений показывают на щите или пульте приборы и средства
автоматизации. Приборы и средства автоматизации устанавливаемые вне щита или
пульта и не связанные непосредственно с технологическим оборудованием и
коммутации, условно показывают прямоугольники с надписью «Приборы по месту».
Такой прямоугольник располагают под прямоугольником щита или пульта, при
разработке функциональной схемы, на основании анализа условий работы
технологического оборудования, необходимо решить следующие вопросы:
1. Определить оптимальный объём автоматизации технологического
процесса
2. На функциональной схеме необходимо выделить исходную систему
автоматического управления, разбить на локальные и замкнутые системы
автоматического управления и програмно-логические системы.
3. Уточнить технологические параметры подлежащие автоматическому
управлению и контролю, установить их параметры и выбрать методы измерения этих
параметров, для последующего выбора технических средств, для их реализации.
4. Определить объёмы автоматической защиты и блокировок
технологических установок.
5. Выбрать основные технические средства автоматизации.
6. Разместить аппаратуру на щитах и пультах.
Функциональная
электрическая схема кормораздатчика изображена на первом листе графической
части.
При проектировании
логической части схем автоматики, цикл работы задаётся последовательностью
включения и отключения механизмов. В ходе разработки системы управления
определяют последовательность работы исполнительных элементов технологической
линии, порядок управления, число конечных выключателей и других командных
аппаратов, управляющих процессом.
Схема располагается
на листе 1 графической части.
При кратковременном нажатии кнопки
пуск запускается двигатель загрузочного транспортера. Затем запускается
двигатель выгрузного шнека, размыкается датчик нижнего уровня, после
срабатывания датчика веса раздаточная платформа начинает движение в перед,
размыкается конечник обратного хода. Когда платформа доходит до конца
срабатывает конечник и движение продолжается в обратном направлении отключается
один конечник, отключается загрузочный транспортер и выгрузной шнек доходя до
конца платформы отключает второй конечник который отключает всю схему.
Рисунок 2.1: Технологическая схема
раздачи кормов
Составим таблицу, где приведем
буквенные обозначения командных, исполнительных и промежуточных органов РКС.
Таблица 2.1.
Буквенное обозначение коммутирующих, исполнительных и промежуточных органов РКС
|
Обозначение
|
Назначение элементов
|
Механизм управления элементам
|
|
X1
|
Катушка магнитного пускателя привода загрузочного транспортера
|
Кормораздатчик
|
|
X2
|
Катушка магнитного пускателя привода выгрузного шнека
|
Кормораздатчик
|
|
X3
|
Катушка магнитного пускателя привода разгрузочной платформы
«вперед»
|
Кормораздатчик
|
|
X4
|
Катушка магнитного пускателя привода разгрузочной платформы
«назад»
|
Кормораздатчик
|
|
b1
|
Датчик веса
|
Раздаточная платформа
|
|
b2
|
Концевой выключатель выключающий движение платформы «влево»
|
Раздаточная платформа
|
|
b3
|
Концевой выключатель выключающий движение платформы «вправо»
|
Раздаточная платформа
|
|
b4
|
Датчик нижнего уровня
|
Бункер дозатор
|
|
a1
|
Включение транспортера разгрузочного
|
Разгрузочный транспортер
|
3.
Разработка принципиальной электрической схемы
Используя словесное
описание технологического процесса раздачи кормов, заменяя механизмы соответствующими
элементами, составим символическое описание технологического процесса
1 2 3 4 5 6 7 8 9
10 11 12 13 14 15 16 17 18
↑a1-↑b4-↑x1-↓a1-↑x2-↑b1-↑x4-↑b2-↑b3-↓x4-↑x3-↓b3-↓b4-↓x1-↓x2-↓b2-↑x3-↓b1
Принципиальные
электрические схемы отражают с достаточной полнотой и наглядностью взаимные
связи между отдельными элементами и аппаратами входящими в состав установки.
На принципиальной
электрической схеме указываются схемы силовых цепей и схемы вспомогательных
цепей (контроля и сигнализации).
Принципиальные
электрические схемы выполняют совмещенным или разнесенным способами.
Принципиальная
электрическая схема располагается на листе 2 графической части.
Составление
частных таблиц включения для исполнительных элементов
Из структурной
теории релейных устройств известна общая формула для определения структурной
первоначальной цепи управления элементами.
 (3.1.1)
(3.1.1)
где Fср - состояние вспомогательных
элементов в такте срабатывания;
Fотп - состояние вспомогательных элементов в такте отпускания.
Таблица 3.1 -
Частная таблица включения для исполнительного элемента x1
|
№ элемента
|
N Код элемента
|
Элемент
|
Такты
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
14
|
|
1
|
1
|
x1
|
|
|
+
|
|
|
|
|
|
|
|
|
|
|
-
|
|
2
|
2
|
a1
|
+
|
|
|
-
|
|
|
|
|
|
|
|
|
|
|
|
3
|
4
|
b4
|
|
+
|
|
|
|
|
|
|
|
|
|
|
-
|
|
|
Весовое состояние
|
2
|
6
|
7
|
5
|
5
|
5
|
5
|
5
|
51
|
5
|
5
|
5
|
1
|
0
|
Таблица 3.2 - Частная таблица
включения для исполнительного элемента x2
|
№ элемента
|
N Код элемента
|
Элемент
|
Такты
|
|
|
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
14
|
15
|
|
1
|
1
|
x2
|
|
|
|
+
|
|
|
|
|
|
|
|
|
|
-
|
|
2
|
2
|
x1
|
|
+
|
|
|
|
|
|
|
|
|
|
|
-
|
|
|
3
|
4
|
b4
|
+
|
|
|
|
|
|
|
|
|
|
|
-
|
|
|
|
Весовое состояние
|
4
|
6
|
6
|
7
|
7
|
7
|
7
|
7
|
7
|
7
|
7
|
3
|
1
|
0
|
Таблица 3.3 - Частная таблица
включения для исполнительного элемента x3
|
№ элемента
|
N Код элемента
|
Элемент
|
Такты
|
|
|
|
8
|
9
|
10
|
12
|
13
|
14
|
15
|
16
|
17
|
|
1
|
1
|
x3
|
|
|
|
+
|
|
|
|
|
|
-
|
|
2
|
2
|
b3
|
|
+
|
|
|
-
|
|
|
|
|
|
|
3
|
4
|
b2
|
+
|
|
|
|
|
|
|
|
-
|
|
|
Весовое состояние
|
0
|
0
|
0
|
2
|
3
|
3
|
1
|
4
|
4
|
0
|
Таблица 3.4 - Частная таблица
включения для исполнительного элемента x4
|
№ элемента
|
N Код элемента
|
Элемент
|
Такты
|
|
|
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
14
|
15
|
16
|
17
|
18
|
|
1
|
1
|
x4
|
|
+
|
|
|
-
|
|
|
|
|
|
|
|
|
|
2
|
2
|
b1
|
+
|
|
|
|
|
|
|
|
|
|
|
|
-
|
|
3
|
4
|
b3
|
|
|
|
+
|
|
|
-
|
|
|
|
|
|
|
|
Весовое состояние
|
2
|
3
|
3
|
7
|
6
|
6
|
2
|
2
|
2
|
2
|
2
|
2
|
0
|
Составляем первоначальные структуры
цепей управления для элементов x1, x2, x3, x4,




Составление таблиц покрытий для исполнительных элементов
Первичная структурная формула
сокращается с помощью таблиц покрытия, назначение которых состоит в исключении
лишних сигналов из первоначальной структурной формулы. В горизонтальные строки
вписываются все слагаемые произведения находящиеся в первоначальных структурных
формулах элементов, а в вертикальные клетки таблиц вписываются номера тактов включающего
состояние данного элемента, т.е. от такта срабатывания до такта предыдущему
такту срабатывания.
Таблица 3.2.1-Таблица покрытия для
элемента x1
|
Произведения
|
Такты
|
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
|
|
|
|
|
|
|
|
|
|
|
|
 -х--------- -х---------
|
|
|
|
|
|
|
|
|
|
|
|
|
 -хххххххххх -хххххххххх
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.2.2-Таблица покрытия для
элемента x2
|
Произведения
|
Такты
|
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
|
 ххххххххх- ххххххххх-
|
|
|
|
|
|
|
|
|
|
|
|
 -ххххххххх -ххххххххх
|
|
|
|
|
|
|
|
|
|
|
|
 -ххххххххх -ххххххххх
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.2.3-Таблица покрытия для
элемента х3
|
Произведения
|
Такты
|
|
10
|
11
|
12
|
13
|
14
|
15
|
|
 xх---- xх----
|
|
|
|
|
|
|
|
 -х---- -х----
|
|
|
|
|
|
|
|
 -хxхxх -хxхxх
|
|
|
|
|
|
|
Таблица 3.2.4-Таблица покрытия для
элемента х4
|
Произведения
|
Такты
|
|
6
|
7
|
8
|
|
 xxх xxх
|
|
|
|
|
 --- ---
|
|
|
|
|
 -xx -xx
|
|
|
|
Упрощенные структурные
формулы и принципиальные электрические схемы для исполнительных элементов
Исходя из таблицы
3.2.1, структурная формула для элемента х1 будет иметь вид:

Составляем упрощенную электрическую
схему для исполнительного элемента х1 и х2:
Рисунок 3.3.1 - Структурная схема
элементов х1
Исходя из таблицы 3.2.2, структурная
формула для элемента х2 будет иметь вид:

Составляем упрощенную
электрическую схему для исполнительного элемента х3
Рисунок 3.3.2 - Структурная схема
элементов х2
Исходя из таблицы 3.2.3, структурная
формула для элемента х3 будет иметь вид:

Составляем упрощенную
электрическую схему для исполнительного элемента х3
Рисунок 3.3.3 - Структурная схема
элементов х3
Исходя из таблицы 3.2.4, структурная
формула для элемента х4 будет иметь вид:
Составляем упрощенную электрическую
схему для исполнительного элемента х4
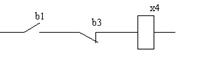
Рисунок 3.3.4 - Структурная схема
элементов х4
Из отдельных упрощенных
принципиальных электрических схем составляем одну общую схему для всей
установки
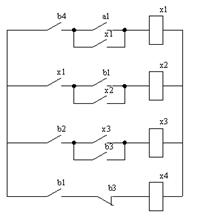
Рисунок 3.3.5 - Общая упрощенная
электрическая схема управления технологическим процессом
Из поученной упрощенной
принципиальной схемы производим замену обозначений элементов, затем составляем
принципиальную электрическую схему с учетом автоматического и ручного режима и
сигнализации работы.
4.
Расчет и выбор элементов и средств автоматизации. Составление спецификации
Правильность выбора средств
автоматизации способствует надежной работе установок.
Выбираю магнитный пускатель для
электродвигателя, который служит для загрузки транспортера АИР80B4У3 мощностью 1,5 кВт, номинальный ток 3,52 А по
условию:
Iн.п. ≥Iн.д; (4.1)
А>3,52А;
Выбираем магнитный пускатель
ПМЛ-121002.
Выбираю автоматический выключатель
для группы электродвигателей:
Iн.авт=∑Iн.дв.; (4.2)
Iн.авт=3,52+3,52+6,7=13,74А;
Iн.р=∑ Iн.р. (4.3)
Iн.р=3,52+3,52+6,7=13,74А;
Uн.а.≥Uн.с.; (4.4)
380В=380В;
Iэм.р.=(Iпус.+∑Iн.дв.); (4.5)
Iэм.р.=46,9+3,52+3,52=53,94;
Выбираю автоматический выключатель
АЕ2026; Iн.а.=16А, Iн.р.=15А, проверяем на ложность срабатывания.
Iср.кан.=Ki∙Iнтр; (4.6)
Iср.р.=12∙15=180А;
Iср.кр.≥Iэм.р.; (4.7)
80А>53,94А.
Ложных срабатываний не будет.
Для электродвигателя челночной ленты и транспортера ПЗА
выбираем аналогичным образом. Результаты сносим в таблицу.
Выбираю переключатель по числу
коммутирующих цепочек, конечный выключатель по климатическому условию и по
номинальному току.
Таблица 4.1 - Выбор ПЗА
|
Автоматический выключатель
|
Iн.р, А
|
11
|
15
|
|
Iн.п,
А
|
10
|
16
|
|
Тип
|
9
|
АЕ 2026
|
|
Пусковой аппарат
|
8
|
ПМЛ- 121002
|
ПМЛ- 121002
|
|
Данные электродвигателя
|
Iпуск
А
|
7
|
8,25
|
8,25
|
21
|
|
Кi
|
6
|
5,5
|
5,5
|
7
|
|
Iн
А
|
5
|
3,52
|
3,52
|
6.7
|
|
Рн кВт
|
4
|
1,5
|
1,5
|
3,0
|
|
Кол-во
|
3
|
1
|
1
|
1
|
|
Тип
|
2
|
АИР 80B4У3
|
АИР 80B4У3
|
АИР 100S4
|
|
Электродвигатель
|
1
|
Загрузочный транспортер
|
Выгрузной шнек транспортер дозатора
|
Разгрузочная платформа
|
5.
Расчет и выбор щитов управления
Средства контроля,
сигнализации и управления размещают в пультах или щитах, что позволяет не
только сконцентрировать средства автоматики, но и сохранить их от вредного
механического, температурного и других воздействий.
Расчётная площадь
шкафа рассчитывается по формуле:
S=∑(Нi+2а)*(Вi+2а), мм2; (5.1)
где Нi - высота аппарата, мм;
Вi - ширина аппарата, мм;
а - расстояние необходимое для прокладки жгутов и кабелей, мм.
Отсюда:

 =63975 мм²
=63975 мм²
Выбираем шкаф ЩПК 300х300 мм
Таблица 5.1.
Перечень используемых аппаратов защиты и коммутации
|
Обозначение
|
Наименование
|
Кол-во
|
Примечание
|
|
Шкаф ЩПК
|
1
|
300*300 мм
|
|
QF
|
Автоматический выключатель АЕ2026
|
1
|
45*75 мм
|
|
KM1
|
Пускатель магнитный
|
1
|
45*70 мм
|
|
KM2
|
Пускатель магнитный
|
1
|
45*70 мм
|
|
KM3
|
Пускатель магнитный
|
1
|
45*70 мм
|
|
KM4
|
Пускатель магнитный
|
1
|
45*70 мм
|
|
XT1
|
Клемная колодка
|
1
|
200*30 мм
|
6.
Разработка мероприятий по электробезопасности при эксплуатации электрической
части объекта
Вопросы обеспечения
электробезопастности при использовании электроэнергии на животноводческих
фермах и комплексов требуют особого внимания, поскольку помимо защиты от
электрического поражения людей необходимо решать вопросы защиты
сельскохозяйственных животных. Причём к защитным мероприятиям от электрического
поражения животных предъявляются более жёсткие требования, т.к. это связано с
их большой чувствительностью к электрическому току.
Для обеспечения безопасности
сельскохозяйственных животных на всех вновь строящихся и реконструируемых
фермах и комплексах, в помещениях, где располагают животные, выполняются
устройство выравнивания электрических потенциалов (УВЭП).
Устройство выравнивания
электрических потенциалов осуществляет защиту сельскохозяйственных животных:
при замыкания фазного провода на корпус электроустановок в сети напряжения до
1000 В и выносе потенциала через защитный нулевой провод к автопоилкам, к
кормораздаточным транспортёрам и другим металлическим конструкциям, доступных
прикосновению животных. Рекомендуется устройство выравнивания электрических
потенциалов закладывать в землю на ширину 0,8-0,9 м или 0,44R под твёрдое покрытие, в центре
которого устанавливается автопоилка. Здесь R - радиус кольцевого заземлителя
равным 1,5-2 м. От заземлителя прокладывается заземляющий проводник, который
сваркой или при помощи резьбовой соединения присоединяют к корпусу автопоилке и
к защитному нулевому проводу источникам электроэнергии. Устройство выравнивания
электрических потенциалов выполняют одним или двумя стальными круглыми
проводниками диаметром 6-8 мм и прокладывают в бетоне под передними и задними
ногами животных вдоль фронта их расположения в стойлах.
Для обеспечения защиты
сельскохозяйственных животных от электрического поражения при замыкания фазного
провода на корпус электродвигателей, насосов, системы автопоения устанавливают
изолирующие вставки. Для установки такой вставки в самой системе труб
автопоения вырезают кусок трубы длиной не менее 1 м и на освободившейся место
ставят резиновый шланг (без металавключений) или полиэтиленовую трубу. Сущность
защиты заключается в том, что столб воды в изолирующей вставке, обладает
электрическим сопротивлением, ограничивает ток, идущим по трубам к автопоилкам
до величины, безопасной для животных.
Заключение
Данный курсовой
проект выполнен на тему: «Автоматизация раздачи кормов кормораздатчиком
Р-3000М». В результате выполнения проекта были составлены функциональная и
технологические схемы, а также разработана принципиальная электрическая схема
управления кормораздатчиком, с учётом ручного и автоматического режимов работы
и сигнализации работы электроприводов.
Разработанная
принципиальная электрическая схема управления кормораздатчика позволяет
осуществлять процесс раздачи кормов с минимальными затратами человеческого
труда и продукта.
Предусмотрена защита
электродвигателей от аварийных режимов работы. Выбрана пускозащитная
аппаратура, средства автоматизации, выбран щит управления с расположенными в
нём элементами схемы
Список используемых
источников
1. Долгий В.И. Автоматизация
технологических процессов. Методические рекомендации для учащихся средних
специальных учебных заведений по выполнению курсового проекта, по специальности
С0302 «Электрификация и автоматизация сельского хозяйства» - Мн.:
Учебно-методический центр. 1997 г.
. Каганов И.Л. Курсовое и дипломное
проектирование. - М.: Агропромиздат, 1990.
. Кудрявцев И.Ф., Калинин Л.А.
Электрооборудование и автоматизация сельскохозяйственных агрегатов и установок.
- М.: Агропромиздат, 1988.
. Правила устройства
электроустановок /Минэнерго СССР. 6-е издание, переработанное и дополненное. -
М.: Энергоатомиздат, 1986.