Асинхронные электродвигатели, способы измерения скорости и момента
Областное государственное бюджетное
профессиональное образовательное учреждение
«Смоленский политехнический техникум»
Реферат
по дисциплине:
«Электрический привод»
на тему:
«Асинхронные электродвигатели,
способы измерения скорости и момента»
Выполнил:
студент группы 3-09-Э
Лозутов
Андрей
Проверил:
Абросов А.И
Смоленск
Содержание
Асинхронный двигатель - принцип работы и устройство
Принцип работы
Способ измерения электромагнитного момента асинхронного
двигателя
Регулирование частоты вращения асинхронных двигателей
Изменение скольжения
Изменение числа пар полюсов
Изменение частоты источника питания
Список используемой литературы
Современные
трёхфазные
<#"865486.files/image001.jpg">
На рисунке: 1 - вал, 2,6 - подшипники, 3,8 -
подшипниковые щиты, 4 - лапы, 5 - кожух вентилятора, 7 - крыльчатка
вентилятора, 9 - короткозамкнутый ротор, 10 - статор, 11 - коробка выводов.
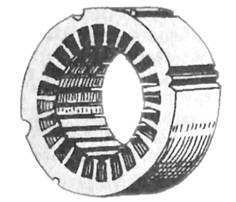
Основными частями асинхронного двигателя являются
статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из
листов стали. В пазах сердечника статора уложены обмотки статора, которые
выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве
относительно друг друга на угол 120°. В зависимости от подаваемого напряжения
концы обмоток соединяются треугольником или звездой.
асинхронный двигатель электромагнитный полюс
Роторы асинхронного двигателя бывают двух видов:
короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник,
набранный из листов стали. В пазы этого сердечника заливается расплавленный
алюминий, в результате чего образуются стержни, которые замыкаются накоротко
торцевыми кольцами. Эта конструкция называется "беличьей клеткой". В
двигателях большой мощности вместо алюминия может применяться медь. Беличья
клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно
название.
Фазный
ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки
статора. В большинстве случаев концы обмоток фазного ротора соединяются в
звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток,
которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный
резистор. Это нужно для того, чтобы можно было изменять активное сопротивление
в цепи ротора, потому что это способствует уменьшению больших пусковых токов.
Подробнее о фазном роторе можно прочитать в статье -асинхронный двигатель с
фазным ротором <#"865486.files/image004.gif">
Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе
создаётся магнитный поток, который изменяется с частотой подаваемого
напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как
во времени, так и в пространстве. Результирующий магнитный поток оказывается
при этом вращающимся.
Результирующий магнитный поток статора вращается и тем
самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую
электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя
с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся
повернуть ротор в направлении вращения магнитного поля статора. Когда он
достигает значения, тормозного момента ротора, а затем превышает его, ротор
начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s - это величина, которая показывает,
насколько синхронная частота n1 магнитного поля статора больше, чем частота
вращения ротора n2, в процентном соотношении.
Скольжение это крайне важная величина. В начальный
момент времени она равна единице, но по мере возрастания частоты вращения n2
ротора относительная разность частот n1-n2 становится меньше, вследствие чего
уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение
вращающего момента. В режиме холостого хода, когда двигатель работает без
нагрузки на валу, скольжение минимально, но с увеличением статического момента,
оно возрастает до величины sкр - критического скольжения. Если двигатель
превысит это значение, то может произойти так называемое опрокидывание
двигателя, и привести в последствии к его нестабильной работе. Значения
скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения
оно составляет в номинальном режиме - 1 - 8 %.
Как только наступит равновесие между электромагнитным
моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой
на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя
заключается во взаимодействии вращающегося магнитного поля статора и токов,
которые наводятся этим магнитным полем в роторе. Причём вращающий момент может
возникнуть только в том случае, если существует разность частот вращения
магнитных полей.
Способ
измерения электромагнитного момента асинхронного двигателя
Использование: в системах регулирования асинхронных электропроводов с
преобразователями частоты на основе автономных инверторов с широтно импульсным
регулированием напряжения. Сущность: при способе измерения электромагнитнолго
момента асинхронного двигателя, питаемого от сети через преобразователь частоты
на основе автономного инвертора с широтно импульсным регулированием выходного
напряжения с помощью датчика тока измеряют ток в звене постоянного тока
преобразователя частоты и вычисляют электромагнитный момент по формуле,
приведенной в тексте описания. 5 ил.
Изобретение относится к электротехнике, в частности к
частотно-управляемым электроприводам, и может быть использовано в качестве
датчика электропривода (или способа его реализации) в системах регулирования
асинхронных электроприводов с преобразователями частоты на основе автономных
инверторов с широтно-импульсным регулированием напряжения.
Известен способ измерения электромагнитного момента асинхронного
двигателя, питаемого от преобразователя частоты на основе автономного инвертора
тока, заключающийся в том, что измеряют ток на входе преобразователя частоты,
измеряют напряжение на входе инвертора и измеряют на входе системы управления
инвертором преобразователя частоты сигнал, пропорциональный выходной частоте
инвертора, а электромагнитный момент двигателя вычисляют как результат частного
от деления произведения измеренных сигналов тока и напряжения на упомянутый
сигнал, пропорциональный выходной частоте инвертора.
Известен также способ измерения электромагнитного момента асинхронного
двигателя, питаемого от преобразователя частоты на основе автономного инвертора
с широтно-импульсным регулированием выходного напряжения, заключающийся в том,
что измеряют на выходе инвертора статорные токи двух фаз двигателя, вычисляют
статорный ток третьей фазы двигателя путем суммирования измеренных сигналов
двух фазных токов двигателя, системой управления инвертором преобразователя
частоты формируют для трех выходных фаз преобразователя частоты сигналы задания
знака полуволны основной гармоники выходного фазного напряжения: +1 для
положительной полуволны, -1 для отрицательной полуволны, вычисляют произведения
измеренных и вычисленных значений фазных токов двигателя на соответствующей
данной фазе сигнал задания знака полуволны основной гармоники фазного
напряжения инвертора, при этом электромагнитный момент двигателя находят в виде
суммы полученных произведений сигналов.
Недостатками известного способа измерения электромагнитного момента
являются сложность, обусловленная наличием двух операций измерения
высокопотенциальных электрических сигналов (а именно, двух фазных токов),
ограниченная область применения, а именно, электроприводами, в которых
обеспечивается управление асинхронным частотно-регулируемым двигателем с
постоянным магнитным потоком двигателя, так как измеряемый известным способом
сигнал (активной составляющей статорного тока двигателя) пропорционален
электромагнитному моменту асинхронного двигателя только при неизменном значении
магнитного потока; в случае управления двигателем с изменяющимся магнитным
потоком при известном способе вносится существенная ошибка в величину
измеряемого электромагнитного момента (до 20-50%). Также недостатком известного
способа является увеличение пульсаций измеренного момента на низкой выходной
частоте электропривода, требующее дополнительной фильтрации для устойчивой
работы в системе регулирования электропривода; это вносит значительное
запаздывание (0,2-0,3 с), снижая быстродействие.
Известен способ измерения электромагнитного момента асинхронного двигателя,
подключенного к сети через преобразователь частоты на основе автономного
инвертора с широтно-импульсным регулированием выходного напряжения, при котором
измеряют ток, фазные напряжения с последующим вычислением электромагнитного
момента через определенный интеграл от электромагнитной мощности, определяемой
как произведение вычисленной путем суммирования фазных напряжений ЭДС на
величину измеренного тока. Интегрирование производят в течение каждого
полупериода основной гармоники фазного напряжения, при этом в начале каждого
последующего периода времени результат интегрирования обнуляют.
Недостатками данного способа являются сложность, обусловленная наличием
большого числа операций: измерение высокопотенциальных токов и напряжений,
вычисление произведений этих параметров; невысокое быстродействие из-за
запаздывания, равного полупериоду выходного напряжения (время запаздывания
может достигать 0,5-1 с при низких значениях частот и питании двигателя от
преобразователя частоты).
Регулирование
частоты вращения асинхронных двигателей
При работе многих механизмов, приводящихся во вращение асинхронными
двигателями, в соответствии с технологическими требованиями возникает
необходимость регулировать скорость вращения этих механизмов. При заданной
нагрузке на валу частоту вращения ротора можно регулировать:
1. изменением скольжения;
2. изменением числа пар полюсов;
. изменением частоты источника питания.
Изменение
скольжения
Этот способ используют в приводе тех механизмов, где установлены
асинхронные двигатели с фазным ротором. Например, в приводе
подъемно-транспортных машин. В цепь фазного ротора вводится регулировочный
реостат. Увеличение активного сопротивления ротора не влияет на величину
критического момента, но увеличивает критическое скольжение.
Основные недостатки этого способа:
1. Из-за больших потерь на регулировочном реостате снижается
коэффициент полезного действия, т.е. способ неэкономичный.
2. Механическая характеристика асинхронного двигателя с увеличением
активного сопротивления ротора становится мягче, т.е. снижается устойчивость
работы двигателя.
. Невозможно плавно регулировать частоту вращения.
Из-за перечисленных недостатков этот способ применяют для
кратковременного снижения частоты вращения.
Изменение
числа пар полюсов
Эти двигатели (многоскоростные) имеют более сложную обмотку статора,
позволяющую изменять ее число пар полюсов, и короткозамкнутый ротор. При работе
асинхронного двигателя необходимо, чтобы обмотки ротора и статора имели
одинаковое число пар полюсов. Только короткозамкнутый ротор способен
автоматически приобретать то же число пар полюсов, что и поле статора.
Многоскоростные двигатели нашли широкое применение в приводе металлорежущих
станков. Нашли применение двух, трех и четырех скоростные двигатели.
На рис. показана схема соединения и магнитное поле статора двигателя при
последовательном (б) и параллельном (а) соединении полуобмоток.
Рис.
У двухскоростного двигателя обмотка каждой фазы состоит из двух
полуобмоток. Включая их последовательно или параллельно можно в 2 раза изменять
число пар полюсов.
Изменение
частоты источника питания
В качестве таких источников питания в настоящее время начали находить
применение преобразователи частоты (ПЧ), выполняемые на мощных
полупроводниковых приборах - тиристорах. Для сохранения неизменным магнитного
потока, т.е. для сохранения перегрузочной способности двигателя, необходимо
вместе с частотой изменять и действующее значение подведенного напряжения.
Список
используемой литературы
1. Потапов Л.А.,
Юферов Ф.М. Измерение вращающихся моментов и скоростей вращения
микроэлектродвигателей. - М.: Энергия, 1984.
. Мельников
В. Ю., Бородацкий Е.Г. Косвенный контроль координат асинхронного
короткозамкнутого двигателя. Деп. В Казгос ИНТИ, Алматы, 1994, вып.1, 69 с.
. Мельников
В.Ю., Умурзакова А.Д. Косвенный метод контроля крутящего момента асинхронного
электродвигателя// Материалы II Международной научно-практической конференции
««Наука и образование в XXI веке: динамика развития в евразийском пространстве»,
Павлодар, 2011.- с.65-67.
.
Предварительный Патент РК № 18934, бюл. № 11 от 15.11.2007 Способ измерения
крутящегося момента асинхронного электродвигателя/ Мельников В.Ю., Умурзакова
А.Д.
. Умурзакова
А.Д. Способ измерения крутящегося момента асинхронного электродвигателя на
основе косвенного метода контроля координат// Материалы Международной научно-
практической конференции «Индустриально- инновационное развитие на современном
этапе: состояние и перспективы», Павлодар, 2009. - с.56.