Теоретические основы радиоэлектронной разведки
Контрольная работа
теоретические
основы радиоэлектронной разведки
Содержание
1. Общие положения. Демаскирующие признаки
.1 Радиоэлектронная разведка
.2 Демаскирующие признаки целей (сигнатуры)
.3 Радиоэлектронная разведка
.4 Разведка радиоэлектронных средств
.5 Станция радиотехнической разведки
. Способы определения местоположения источников
электромагнитного излучения
.1 Геометрические параметры положения источников
электромагнитного излучения
.2 Амплитудные методы пеленгации источников ЭМИ
.3 Фазовый метод пеленгации источников ЭМИ
.4 Методы обзора пространства
.5 Методы и устройства измерения разности дальностей от
источников ЭМИ
.6 Ошибки определения линии положения
.7 Методы определения местоположения источников ЭМИ
. Способы определения и запоминания частоты сигналов
разведываемых РЭС
.1 Способы определения несущей частоты сигналов
.2 Поисковые способы определения частоты сигналов
.3 Беспоисковые способы определения частоты
. Анализ структуры сигналов РЭС
.1 Совокупность параметров РЭС, подлежащих радио- и РТР.
Устройства измерения параметров сигналов
.2 Цифровые устройства измерения временных параметров
сигналов
.3 Аналоговые устройства измерения временных параметров
сигналов
.4 Определение вида и параметров модуляции непрерывных сигналов
.5 Анализ спектров радиоизлучений
Литература
. Общие положения. Демаскирующие признаки
.1 Радиоэлектронная разведка
Радиоэлектронная
разведка (РЭР) - получение информации
<#"865349.files/image001.jpg">
Рис. 1 К процессу распознавания объекта
· признаки, характеризующие физические свойства вещества
объекта, например, тепло (определяет тепловой контраст), электропроводность
(определяет радиолокационный контраст), структура (рис. 2, 3);

Рис. 2. Образ объекта
· признаки, характеризующие свойства физических полей,
создаваемых объектом (к таким физическим полям можно отнести электромагнитное
поле, акустическое поле, радиационное поле, гравитационное поле);
· признаки, характеризующие пространственное положение
(координаты) объекта и производные от координат, если объект перемещается.

Рис. 3. Образ объекта
К демаскирующим признакам действий противника относятся:
· сосредоточение группировок войск и военной техники на
возможных направлениях наступления;
· увеличение количества огневых средств на огневых позициях;
· повышение активности всех видов разведки и интенсивности
функционирования радиоэлектронных средств.
Одним из существенных демаскирующих признаков, присущим всем без
исключения объектам, является электромагнитное излучение.
Оно может быть естественного (природного) и искусственного происхождения,
первичным (собственным) или вторичным (отраженным).
Собственным является тепловое излучение и электромагнитное излучение РЭС.
Тепловое излучение - электромагнитное излучение, испускаемое объектами с
температурой, большей -273˚С. Оно имеет шумоподобный характер в полосе от
ультрафиолетового до СВЧ (сплошной, но неравномерный спектр).
С повышением температуры излучающей поверхности спектральная плотность
излучения на всех частотах растет. Полная энергия W~К4 (закон Стефана-Больцмана).
Излучения РЭС и ОЭС - это, прежде всего их основные (преднамеренные)
излучения в целях обеспечения функционирования по предназначению - излучения
средств разведки, связи, управления, локации, навигации, радиоэлектронного
подавления.
Особенность основных излучений - наличие закономерностей в их
пространственной, временной и спектральной структуре: диаграмма направленности
излучения, длительность и период следования излучаемых импульсов, несущая
частота, вид амплитудного и фазочастотного спектра, ширина спектра и др.
Вторичные электромагнитные излучения - излучения, возникающие за счет
отражения (рассеяния) электромагнитных волн, облучающих объект. Падающие на
объект электромагнитные волны рассеиваются им во всех направлениях, в том числе
и в направлении источника излучения. Для вторичного излучения реальных объектов
характерна зависимость его параметров (интенсивности, спектра, поляризации,
наклона фазового фронта) от отражательной способности, геометрической формы и
размеров объекта, поляризации падающей волны, взаимной ориентации источника
облучения и объекта и, наконец, от параметров их относительного движения.
Первичные и вторичные электромагнитные излучения могут быть приняты и
проанализированы. По результатам анализа делаются выводы об объекте разведки
или намерениях противника. Иными словами, электромагнитные излучения позволяют
вести разведку объектов и их распознавание.
1.3 Радиоэлектронная разведка
электромагнитный излучение сигнал частота
Радиоэлектронная разведка (РЭР) предназначена для добывания данных о
противнике с помощью РЭС и ОЭС путем приема и анализа электромагнитных излучений
объектов разведки [4].
В зависимости от применяемых принципов и технических средств РЭР
подразделяется:
· на радиоразведку (РР);
· радиотехническую разведку (РТР);
· радиолокационную разведку (РЛР);
· радиотепловую разведку;
· оптико-электронную разведку.
РЭР позволяет решать следующие задачи:
· обнаруживать объекты;
· определять их местоположение и параметры движения;
· определять параметры объектов (в том числе РЭС и ОЭС) и
характер их изменения во времени; определять предназначение объектов разведки и
их типы - опознавать их образы.
Для решения указанных задач применяются:
· станции радиоразведки;
· станции радиотехнической разведки;
· радиолокационные, радиотеплолокационные станции (РЛС, РТЛС);
· оптико-электронные средства (тепловизоры, оптические локаторы,
телевизионные станции).
Средства РЭР работают в активном или пассивном режиме (с излучением или
без излучения электромагнитных волн), в широком диапазоне спектра - от
оптического до сверхдлинноволнового.
Они устанавливаются на земле (море), в воздухе и космосе и позволяют
вести соответственно наземную, морскую, воздушную и космическую РЭР. РЭР, как
никакой другой вид разведки, добывает данные о наземных, морских, воздушных и
космических объектах противника в широком диапазоне дальностей (от нескольких
километров до нескольких тысяч километров), высот (от нескольких метров до
нескольких сот и тысяч километров) и условий применения (в простых и сложных
метеоусловиях).
РЭР может проводиться без непосредственного контакта с объектом разведки.
Поэтому она малоуязвима для противника.
Эффективность ведения РЭР в значительной степени зависит от выбранного
вида разведки и используемых технических средств, так как каждому из них
свойственны свои возможности и особенности, преимущества и недостатки.
Рассмотрим отдельно каждый из видов РЭР.
Радиоразведка добывает данные о противнике путем поиска, перехвата,
пеленгования и анализа излучений его РЭС связи (радиостанций). Радиоразведка
осуществляется с помощью специальных радиоразведывательных станций,
радиопеленгаторов и радиоразведывательных комплексов.
В результате разведки определяются:
· содержание передаваемой информации;
· местоположение и тактико-технические данные радиостанций;
· интенсивность их работы за некоторый интервал времени;
· система расположения радиостанций и плотность их размещения в
определенном районе.
Радиотехническая разведка (РТР) получает сведения о противнике путем
обнаружения и анализа сигналов, излучаемых РЭС локации, навигации, управления и
средствами РЭБ.
РТР ведется с помощью специальных станций радиотехнической разведки. По
данным РТР определяются назначение, тип и местоположение РЭС.
Радиолокационная разведка обеспечивает обнаружение, определение координат
и параметров движения наземных, воздушных и космических объектов противника в
широком диапазоне дальностей и высот.
В основу радиолокационной разведки положены принципы активной
радиолокации.
Достоинство РЛР - она позволяют вести наблюдение объектов при любых
метеоусловиях.
Преимуществом радиолокационной разведки является также то, что РЛС
способны обнаруживать объекты на больших расстояниях - сотни и тысячи
километров.
Для ведения воздушной радиолокационной разведки наземных объектов
применяются панорамные РЛС кругового обзора и РЛС бокового обзора (РЛС БО).
Одной из существенно важных характеристик РЛС разведки является их
разрешающая способность по дальности и угловым координатам, определяющая
детальность радиолокационного изображения. Повышение разрешающей способности
РЛС достигается уменьшением длительности импульса, сужением диаграмм
направленности антенн, а также использованием специальных способов
преобразований сигналов в РЛС.
Основной недостаток панорамных РЛС - это низкая линейная разрешающая
способность по азимуту.
РЛС бокового обзора (БО) с так называемой синтезированной апертурой (РСА)
- имеют существенно более высокую разрешающую способность по азимуту, что
позволяет получать радиолокационные изображения земной поверхности и объектов,
по дальности сравнимые с аэрофотоснимками.
Достоинством РЛС БО является также то, что самолеты-разведчики при
ведении разведки могут осуществлять полеты над своей территорией. При этом
представляется возможным вести радиолокационное наблюдение объектов,
находящихся на больших расстояниях от самолета и замаскированных от оптического
и ИК-наблюдения.
РЛС БО подразделяют на РЛС с вдольфюзеляжной антенной и РЛС с
синтезированной (искусственной) апертурой антенны.
В РЛС с вдольфюзеляжной антенной повышение разрешающей способности по
азимуту достигается увеличением горизонтального размера (до 7…15 м) приемопередающей
антенны. При таких размерах антенны ширина ее диаграммы направленности
составляет доли градусов, а линейная разрешающая способность РЛС в азимутальной
плоскости - десятки метров.
В вертикальной плоскости антенна РЛС формирует широкую диаграмму
направленности, обеспечивающую облучение земной поверхности в некотором
диапазоне наклонных дальностей (от нескольких километров до нескольких десятков
километров) до наземных объектов. Обзор земной поверхности производится за счет
перемещения летательного аппарата. При этом просматривается боковая полоса
поверхности. РЛС БО с вдольфюзеляжной антенной позволяют получать детальные
радиолокационные изображения только на относительно небольших дальностях до
объектов (от нескольких километров до 10…30 км). С увеличением наклонной
дальности линейная разрешающая способность по азимуту ухудшается. Так, при
длине антенны, равной 10 м, и длине волны РЛС λ = 3см линейная разрешающая способность
по азимуту при изменении дальности до объектов от 5 до 50 км ухудшается с 16 до
150 м.
Высокую угловую и линейную разрешающую способность по азимуту на больших
дальностях от самолета-разведчика имеют РЛС БО с искусственной
(синтезированной) апертурой антенны при малых физических (реальных) ее
размерах. Создание эквивалентных апертур с увеличенной эффективной длиной
достигается благодаря когерентному суммированию отраженных сигналов,
принимаемых на определенном прямолинейном отрезке пути, пролетаемом самолетом.
Синтезирование апертуры позволяет увеличить разрешающую способность РЛС по
азимуту в 100 и более раз по сравнению с панорамными РЛС кругового обзора. По
разрешающей способности данные РЛС приближаются к оптическим средствам
наблюдения.
К недостаткам РЛС БО относятся необходимость точного выдерживания
горизонтального и прямолинейного полета и зависимость качества
радиолокационного изображения от пространственных флюктуаций траектории полета
летательного аппарата - носителя РЛС.
Радиотепловая разведка основана на обнаружении и определении
местоположения наземных, морских, воздушных и космических объектов по их
тепловому излучению в радиодиапазоне. Характеристики радиотеплового излучения
(интенсивность, спектральный состав, спектральная плотность) зависят от
физических свойств вещества и температуры излучающего объекта.
.4 Разведка радиоэлектронных средств
РЭС являются важнейшими объектами разведки. На основании анализа данных о
РЭС противника (их местоположении, тактико-технических характеристиках) могут
быть сделаны выводы о группировке сил и средств противника, дана оценка его
возможным замыслам на предстоящие боевые действия [4].
Любая РЭС имеет присущие ему демаскирующие (опознавательные) признаки.
К демаскирующим признакам РЭС относятся его внешний вид, внешний вид
отдельных элементов (прежде всего антенного устройства).
Основным демаскирующим признаком РЭС являются его собственные
электромагнитные излучения. Из сказанного следует, что для разведки РЭС могут
быть использованы практически все известные способы и средства разведки:
визуальное наблюдение, фотографирование, разведка с помощью РЭС.
В зависимости от режима работы РЭС (выключено, включены источники
питания, включен передатчик и т. д.) характеристики теплового излучения будут
изменяться. При облучении (подсвете) РЭС отраженный сиг нал несет информацию о
РЭС, особенно о его антенном устройстве.
Наиболее важные и достоверные данные о РЭС (режимах работы, принципах и
особенностях функционирования, параметрах средств и параметрах сигналов, их
назначении и типе) можно получить при ведении РТР. С помощью ее средств определяются:
· направление на РЭС (как на источник электромагнитного
излучения) φи; местоположение РЭС;
· несущая частота f0;
· закон изменения несущей частоты во времени f(t);
· амплитудно-частотный спектр сигнала S(ω) или его ширина;
· временные параметры сигналов: длительность и и период следования Тп импульсов;
длительность импульсной кодовой посылки и временные интервалы между импульсами
посылки;
· время облучения Тобл станции разведки (время воздействия
сигнала РЭС);
· поляризация электромагнитных волн, излучаемых РЭС;
· форма диаграммы направленности антенны РЭС;
· режим работы РЭС (импульсный или непрерывный режим излучения
передатчика).
На основании анализа тонкой структуры сигнала и диаграммы направленности
антенны можно опознать (идентифицировать) конкретное РЭС.
Каждое РЭС данного класса (локация, управление, навигация, разведка)
обладает определенной совокупностью параметров из указанных выше. Совокупность
параметров и диапазоны их значений являются разведывательными (отличительными)
признаками РЭС определенного класса и типа. На основании анализа этой
совокупности определяются назначение, тип, принцип функционирования и
упрощенная структурная схема РЭС.
Параметры сигналов, действующих на входе приемного устройства станции
разведки, могут в существенной степени отличаться от параметров сигналов,
излучаемых разведываемым РЭС.
На форму и длительность сигналов на входе приемника оказывают влияние
чувствительность приемника (при одной и той же мощности сигнала РЭС в
зависимости от чувствительности возможен прием сигналов только по основному
лепестку или вкруговую по основному, боковым и задним лепесткам диаграммы
направленности антенны), ширина диаграммы направленности антенны РЭС и антенны
станции разведки, скорость вращения (сканирования) указанных антенн и взаимные
пространственные перемещения объекта разведки и средства разведки.
Очевидно, что чем больше различия сигналов, тем меньше достоверность
разведданных, тем выше вероятность принятия ошибочного решения об образе РЭС.
Уменьшить эти различия можно только согласованием пространственно-временных и
частотных характеристик средства разведки с параметрами разведываемого РЭС.
Следует отметить, что возможности радио- и РТР в некоторых случаях
ограничены, так как переносчиком информации о разведываемом объекте (РЭС)
являются излучаемые им сигналы. В частности, получение данных исключено при
выключенном РЭС или его работе в пассивном режиме. Эффективность и
достоверность разведки снижаются при принятии противником мер, направленных на
скрытие как самих излучений, так и их параметров (применение остронаправленных
передающих антенн, снижение уровня боковых лепестков диаграмм направленности
антенн, сокращение времени излучения, маскировка излучений ложными излучениями
и т. д.).
.5 Станция радиотехнической разведки
Станции РТР должны обеспечивать прием сигналов РЭС в заданных диапазонах
частот и направлений, обнаружение сигналов и пеленгацию их источников, анализ и
определение параметров принятых сигналов, регистрацию и документирование
разведданных [4]. Кроме того, может быть предусмотрена передача полученных
сведений на пункт сбора и обработки информации. Указанные функции в станции РТР
(рис. 4) выполняют: антенное устройство (АУ), приемное устройство (ПРМУ),
пеленгационное устройство (ПУ), устройство анализа параметров сигналов (УАПС),
устройство регистрации разведданных (УРД).
Антенное устройство осуществляет пространственную селекцию (разделение)
сигналов, излучаемых разведываемыми РЭС. Оно должно обеспечивать прием сигналов
в широком диапазоне несущих частот. Для определения направления на источники
сигналов (пеленгации РЭС) применяют антенны с узкой диаграммой направленности.
Пеленгация нескольких РЭС производится путем одновременного (беспоискового) или
последовательного (поискового) пространственного разделения сигналов.
Рис. 4. Обобщенная структурная схема станция радиотехнической разведки
Одновременное разделение возможно при приеме сигналов РЭС с разных
направлений на несколько остронаправленных идентичных антенн, диаграммы
направленности которых смещены друг относительно друга на ширину основного
лепестка одиночной антенны. Суммарная диаграмма направленности всех антенн
перекрывает заданный диапазон направлений разведки.
Последовательное разделение сигналов осуществляется одной антенной,
принимающей сигналы в пределах основного лепестка ее диаграммы направленности.
Прием сигналов нескольких РЭС в заданном диапазоне направлений разведки
осуществляется за счет последовательного изменения во времени пространственного
положения диаграммы направленности антенны.
Приемное устройство производит прием и селекцию сигналов РЭС по несущей
частоте. Частотное разделение сигналов может быть одновременным (беспоисковым)
или последовательным (поисковым).
При одновременном разделении сигналы нескольких РЭС, с разными частотами,
принимаются независимо несколькими приемными устройствами; их АЧХ разнесены на
ширину полосы пропускания одиночного устройства. В этом случае приемное
устройство станции разведки называют многоканальным. Приемное устройство одного
канала может быть построено, в частности, по схеме приемника прямого усиления.
Последовательное разделение сигналов по частоте производится изменением
частоты настройки приемника в заданном диапазоне несущих частот сигналов РЭС.
Приемное устройство станции разведки в этом случае одноканальное. Для
последовательного разделения могут быть применены супергетеродинные приемники с
перестраиваемым по частоте гетеродином и узкополосным УПЧ.
Основными характеристиками приемных устройств станций РТР являются:
чувствительность (минимальная мощность разведываемого сигнала, при котором
обеспечивается его обнаружение с заданными значениями вероятностей правильного
обнаружения и ложной тревоги); перекрываемый диапазон несущих частот
разведываемых сигналов; точность измерения параметров принимаемых сигналов;
разрешающая способность по измеряемому параметру сигнала.
Пеленгационное устройство определяет направления прихода электромагнитных
волн, излучаемых разведываемыми РЭС. Для определения направления (угловых
координат) на РЭС применяются амплитудные, фазовые и частотные методы
пеленгации. По угловым координатам определяется местоположение РЭС.
Основными характеристиками пеленгационных устройств различного типа
являются точность измерения угловых координат РЭС и разрешающая способность по
угловым координатам.
Устройство анализа параметров сигналов предназначено для определения
временных и спектральных параметров сигналов РЭС.
Основными характеристиками анализатора являются: количество измеряемых
параметров сигналов, диапазон значений измеряемых параметров, точность
измерения каждого параметра и разрешающая способность по каждому параметру. Для
измерения значений параметров сигналов применяются различные методы и
устройства. Некоторые из них будут рассмотрены ниже.
Устройство регистрации разведданных служит для автоматической регистрации
параметров принятых сигналов в виде, удобном для анализа и документирования.
. Способы определения местоположения источников электромагнитного
излучения
.1 Геометрические параметры положения источников электромагнитного
излучения
Для определения положения источника электромагнитного излучения (ЭМИ) с
помощью РЭС [4] измеряют некоторую совокупность геометрических параметров
(величин). Геометрические параметры характеризуют положение источника
относительно одной или нескольких фиксированных точек - точек с известными
координатами. В частности, с помощью РЭС, работающих в пассивном режиме, -
средств радио- и РТР, локации, наведения ракет на источник ЭМИ - определяются
пеленг φи источника (рис. 5) из фиксированной
точки О и разность дальностей (расстояний) D1-D2 от источника до
двух фиксированных разнесенных точек (О1 и О2 на рис. 6).
Под пеленгом φи понимают угол между заданным (выбранным)
направлением и направлением на объект - источник ЭМИ (рис. 5). В качестве
заданного направления могут быть направление меридиана (географического,
магнитного) или продольная ось летательного аппарата (самолета, ракеты).
Измерение
геометрических величин позволяет определить линии положения на плоскости и
поверхности положения в пространстве. Линией (поверхностью) положения называют
геометрическое место точек, для которого геометрическая величина, определяющая
возможное положение объекта (источника ЭМИ), имеет постоянное значение.
Если
измеряемой геометрической величиной является пеленг, то линия положения -
прямая, проходящая через точки О и И (рис. 5), а поверхность положения -
плоскость. Различным значениям пеленгов на плоскости соответствует семейство
радиальных прямых, а в пространстве - семейство плоскостей, проходящих через
точку О.
Если
измеряемой геометрической величиной является разность расстояний, то линия
положения представляет собой гиперболу, проходящую через точку И. Точки О1 и О2
- фокусы этой гиперболы (рис. 6). Поверхность положения в этом случае -
гиперболоид вращения. Различным значениям разности расстояний соответствует
семейство софокусных гипербол на плоскости или гиперболоидов вращения в пространстве
с фокусами в точках О1 и О2.
Линии
и поверхности положения определяют бесконечное множество возможных положений
источника излучения. Для исключения неоднозначности необходимо иметь как
минимум две линии положения на плоскости и три поверхности положения в
пространстве.
В
основу определения геометрических параметров положения источников ЭМИ
радиотехническими методами положены закономерности распространения
электромагнитных волн. В свободном пространстве и в однородных средах
электромагнитные волны распространяются прямолинейно и с конечной постоянной
скоростью. Учет этих закономерностей позволяет измерить геометрические величины
по результатам измерения параметров принимаемого ЭМИ.
Направление
на источник ЭМИ в пространстве характеризуется двумя углами во
взаимно-перпендикулярных плоскостях: углом азимута φаз (угол между выбранным направлением и направлением
на источник ЭМИ в горизонтальной плоскости) и углом места (наклона) φум (угол между выбранным направлением и направлением
на источник ЭМИ в вертикальной плоскости). Так как траектория распространения
электромагнитных волн прямолинейна, то измерение с помощью РЭС углов φаз и φум дает
возможность определять направления на источники ЭМИ.
Постоянство
скорости распространения электромагнитных волн позволяет решать задачи по
измерению разности дальностей от точки расположения источника ЭМИ до
фиксированных точек пространства. Измерение разности дальностей сводится к
измерению временных интервалов - разности времен распространения излучения от
их источника до точек расположения приемных устройств РЭС.
В
зависимости от вида измеряемой геометрической величины, следовательно, и от
вида линий положения измерители параметров положения источников ЭМИ
подразделяются на угломерные (пеленгаторные) и разностно-дальномерные.
Указанные измерители способны выдавать информацию о параметрах положения
источника при приеме как модулированных, так и немодулированных, в том числе и
шумоподобных, излучений. Иными словами, могут быть приняты излучения не только
РЭС связи, локации, наведения, но и излучения передатчиков радиопомех, тепловые
излучения объектов. Данные об угловых координатах и разности дальностей
содержатся в амплитудных, фазовых, временных или статистических в том числе
взаимокорреляционных соотношениях сигналов разведываемых РЭС и объектов.
.2
Амплитудные методы пеленгации источников ЭМИ
Пеленг
источника ЭМИ измеряется при приеме сигнала в одном пункте. В зависимости от
вида параметра сигнала, используемого для определения пеленга, методы
пеленгации подразделяются на амплитудные и фазовые. Рассмотрим кратко сущность
каждого из них [4].
В
основу амплитудного метода пеленгации положена зависимость амплитуды
принимаемых сигналов источника ЭМИ от геометрического параметра положения -
пеленга источника. Для получения указанной зависимости в устройствах пеленгации
применяются антенны с четко выраженной направленностью приема. Известны три
разновидности амплитудного метода:
· метод максимума;
· метод минимума;
· метод сравнения.
В устройствах, работающих по методу максимума, радиопеленгаторы имеют
остронаправленную антенну. Диаграмма направленности F(φ) подобной антенны в одной плоскости
изображена на рис. 7.
Пеленг на источник ЭМИ определяется путем изменения пространственного
положения ДНА и измерения углового положения ее максимума относительно
заданного направления. При изменении положения ДНА амплитуда принимаемого
сигнала повторяет ее форму. Фиксируется пеленг в тот момент времени, когда
амплитуда сигнала на выходе приемника радиопеленгатора достигает максимального
значения. Амплитуда сигнала будет максимальной при совпадении направления
максимума ДНА с направлением на источник ЭМИ. На рис. 7 обозначены: φА - угол между заданным направлением
и направлением максимума ДНА; φи - угол между заданным направлением
и направлением на источник ЭМИ; φ - угол между направлением максимума ДНА
и направлением на источник ЭМИ.
Достоинство
метода максимума - большая дальность действия радиопеленгатора (пеленгация
осуществляется по максимальному значению амплитуды принимаемого сигнала).
Основной недостаток - низкая точность определения пеленга источника. Указанный
недостаток обусловлен низкой угловой чувствительностью радиопеленгатора,
характеризующей его способность реагировать на малые отклонения направления
максимума ДНА F(φ) от направления на источник ЭМИ. Для получения высокой
точности пеленгования необходимо применять антенны с узкими диаграммами
направленности.
Метод
минимума предполагает применение антенны с двухлепестковой диаграммой направленности
(рис. 8), имеющей ярко выраженный минимум приема.
При
изменении пространственного положения ДНА фиксируется такое ее положение, при
котором амплитуда сигнала на выходе радиопеленгатора принимает минимальное
значение. При этом отклонение направления минимума ДНА от заданного направления
равно пеленгу φи источника ЭМИ.
Достоинством
метода минимума (по сравнению с методом максимума) является более высокая
точность измерения пеленга, обусловленная высокой угловой чувствительностью
радиопеленгатора. Его основной недостаток - небольшая дальность действия. Этот
недостаток объясняется тем, что определение пеленга производится по
минимальному значению амплитуды принимаемого сигнала.
Упрощенная
структурная схема амплитудного радиопеленгатора, работающего по методу
максимума или минимума, представлена на рис. 9.
Для
реализации метода сравнения необходима антенная система радиопеленгатора с
двумя узкими диаграммами направленности F1(φ + φ0) и F2(φ -
φ0), смещенными одна относительно
другой на некоторый угол 2φ0 (рис.
10).
Рис.
9. Упрощенная структурная схема амплитудного пеленгатора (метод максимума и
минимума)
Рис.
10. Сущность равносигнального метода пеленгации
Пеленг
источника ЭМИ в этом случае определяется путем сравнения сигналов на выходе
радиопеленгатора, принимаемых лепестками F1(φ + φ0) и F2(φ -
φ0) ДНА.
При равенстве амплитуд сравниваемых сигналов точно фиксируется
направление на цель по положению опорного направления антенны в этот момент.
При смещении цели относительно опорного направления вырабатывается сигнал
рассогласования, амплитуда которого указывает величину, а полярность (знак) -
сторону смещения. Метод сравнения широко применяется в следящих измерителях
направления.
Для
исключения влияния неизвестной интенсивности принимаемого сигнала  на сигнал рассогласования производится нормировка,
обычно выполняемая с помощью схемы автоматической регулировки усиления (АРУ).
Благодаря АРУ коэффициент усиления приемника изменяется обратно пропорционально
интенсивности принимаемого сигнала и сигнал рассогласования становится
однозначной функцией смещения цели относительно равносигнального направления.
на сигнал рассогласования производится нормировка,
обычно выполняемая с помощью схемы автоматической регулировки усиления (АРУ).
Благодаря АРУ коэффициент усиления приемника изменяется обратно пропорционально
интенсивности принимаемого сигнала и сигнал рассогласования становится
однозначной функцией смещения цели относительно равносигнального направления.
.3 Фазовый метод пеленгации источников ЭМИ
Фазовый метод пеленгации [4] основан на зависимости разности фаз
сигналов, принимаемых антеннами А1 и А2, от направления прихода
электромагнитных волн, излучаемых источником (рис. 11,а). Антенны А1 и А2 имеют
идентичные диаграммы направленности и разнесены в пространстве на некоторое
расстояние d, называемое базой.
а
б
в
Рис.
11 Упрощенная структурная схема фазового пеленгатора (а), структурная схема
приемника фазового радиопеленгатора (б) и диаграмма, поясняющая фазовую
пеленгацию в пространстве (в)
В
фазовых радиопеленгаторах выполняется условие d<<D,
где D - дальность от пеленгатора до источника ЭМИ. При этом
условии линии, соединяющие антенны А1 и A2 с пеленгуемым
источником, можно считать параллельными D1║D2.
При приеме антеннами А1 и А2 излучения одного источника сигналы и1 (t) и
и2 (t) на их выходах отличаются только величиной времени
запаздывания τз, т.е.
 , (1)
, (1)
где
τз - разность времен распространения сигнала от
источника излучения до антенн А1 и А2.
Если
в качестве заданного направления (начало отсчета углов) выбрана нормаль к базе
радиопеленгатора, то угол φ=φи
будет пеленгом источника. Как видно из рис. 11, а
 ,
,  .
.
Разность
фаз Δψ
сигналов и1(t) и и2(t)
при их несущей частоте ω0
и пеленге φи определяется выражением
 . (2)
. (2)
Отсюда
следует, что пеленг
 . (3)
. (3)
Таким
образом, для определения пеленга источника необходимо измерить частоту ω0 принимаемых сигналов и их разность фаз Δψ в разнесенных точках приема.
Существенным
недостатком однобазовых фазовых радиопеленгаторов является многозначность
отсчета пеленга, обусловленная многозначностью функциональной зависимости (3)
при d>λ, поскольку
 .
.
При
некоторых значениях угла φи и отношении  d/λ фазовый сдвиг сигналов Δψ может превысить 2π. В этом случае из-за цикличности изменения фазы и
возможности ее однозначного измерения только в пределах 2π возникает неоднозначность отсчета угла φи , так как измеритель разности фаз покажет одно и то
же значение при
d/λ фазовый сдвиг сигналов Δψ может превысить 2π. В этом случае из-за цикличности изменения фазы и
возможности ее однозначного измерения только в пределах 2π возникает неоднозначность отсчета угла φи , так как измеритель разности фаз покажет одно и то
же значение при  φи , равном например, 30° и 390° (то есть 360+
φи , равном например, 30° и 390° (то есть 360+ 30°). Для обеспечения однозначности пеленгации в
пределах сектора ±90° необходимо, чтобы разность фаз не превышала ±90°
30°). Для обеспечения однозначности пеленгации в
пределах сектора ±90° необходимо, чтобы разность фаз не превышала ±90° . Из (3) следует, что условие однозначности
выполняется только при
. Из (3) следует, что условие однозначности
выполняется только при  d/λ ≤0.5 .
d/λ ≤0.5 .
Этот недостаток устраняется при использовании антенной системы с
несколькими различными по величине базами.
Измерение пеленга φи по разности фаз Δψ выполняют с помощью двухканального
приемника (рис. 11,б), включающего усилители радиочастоты (УРЧ), гетеродин
(Гет), смесители (См), усилители промежуточной частоты (УПЧ), с измерителем разности
фаз (ИФ), шкала которого проградуирована в значениях угла φи.
Пеленгация
в пространстве выполняется трехканальным радиопеленгатором с базами,
повернутыми друг относительно друга на  . При
необходимости обе базы можно расположить на земной поверхности (рис. 11,в).
. При
необходимости обе базы можно расположить на земной поверхности (рис. 11,в).
На
этих базах образуются разности фаз

 ,
, 
 . (4)
. (4)
Пеленги
цели в горизонтальной α
и вертикальной β плоскостях определяются из решения системы уравнений
(4).
Многоканальные
(моноимпульсные) системы пеленгации - амплитудные и фазовые - постепенно
вытесняют одноканальные пеленгаторы с последовательным сравнением сигналов
ввиду недостаточной точности и низкой помехозащищенности последних. На
моноимпульсные пеленгаторы не действует модулирующая помеха, так как любое
изменение интенсивности входного сигнала в одинаковой степени проявляется во
всех каналах и в принципе возможна идеальная нормировка, выполняемая с помощью
мгновенной АРУ или глубокого ограничения. Моноимпульсные системы пеленгации не
подвержены помехам, создаваемым из одной точки пространства. Однако эти системы
отличаются сложностью аппаратуры и высокими требованиями к идентичности и
стабильности характеристик всех каналов.
Возможности устройств пеленгации по обеспечению требуемой точности
определения направления на источник ЭМИ, разрешающей способности по направлению
и скорости получения информации о разведываемом параметре (пеленге) в
значительной степени зависят от метода обзора разведываемого пространства. В
радио- и РТР нашли применение беспоисковый (одновременный) и поисковый
(последовательный) методы обзора.
.4 Методы обзора пространства
Беспоисковый метод обзора (анализа) пространства заключается в том, что
все излучения в разведываемом диапазоне пространства принимаются одновременно
[4].
При этом радиопеленгатор определяет направления на все источники
практически мгновенно. Одновременный обзор осуществляется с помощью
многоканального пространственно-избирательного устройства - антенной системы,
формирующей многолепестковую неподвижную диаграмму направленности (рис. 12).
Максимумы лепестков ДНА смещены в пространстве относительно друг друга примерно
на ширину одного лепестка. Последняя определяет точность и разрешающую
способность пеленгатора по угловым координатам. Поэтому для повышения точности
и разрешающей способности необходимо «сужать» ДНА каждого канала приема. При
этом увеличивается общее число каналов.
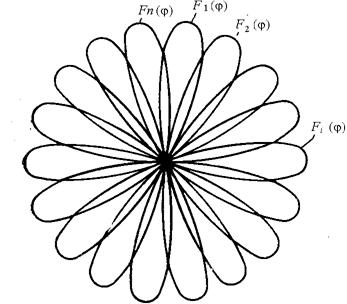
Рис. 12. Диаграмма направленности радиопеленгатора с одновременным
обзором пространства
Суммарная ДНА пеленгатора перекрывает заданную область разведываемого
пространства. Упрощенная структурная схема радиопеленгатора с одновременным
обзором пространства приведена на рис. 13. Прием излучений производится по п
независимым каналам.
Рис.
13. Упрощенная структурная схема радиопеленгатора с одновременным обзором
пространства
Каждый
из них принимает излучения в заданном поддиапазоне пространства, размеры
которого определяются шириной диаграммы направленности его антенны.
В
качестве приемников в пеленгаторах этого типа часто используются приемники
прямого усиления. Достоинством пеленгаторов с одновременным обзором является
то, что данные о направлении на все действующие источники, находящиеся в поле
зрения ДНА пеленгатора, получают одновременно и с вероятностью, равной единице.
Кроме того, эти данные получают практически мгновенно, так как время,
необходимое для разведки параметра, определяется временем распространения излучения
от источника до пеленгатора и временем распространения принятого излучения от
антенны до выходного устройства.
Беспоисковый
метод пеленгации применяется в приемниках оповещения об облучении летательного
аппарата, в станциях радио- и радиотехнической разведки.
Определение
пеленга источника ЭМИ при поисковом методе обзора осуществляется
последовательным во времени просмотром разведываемого диапазона пространства.
Для этого изменяют положение диаграммы направленности одноканального
пространственно-избирательного устройства - антенны радиопеленгатора (рис. 14).
В частности, это может быть осуществлено путем вращения антенны вокруг
вертикальной оси. За начало отсчета пеленга может быть принято положение
максимума ДНА, совпадающее с заданным направлением, например, с продольной осью
ЛА.
Упрощенная
структурная схема радиопеленгатора с последовательным обзором пространства
изображена на рис. 14.
Рис.
14. Структурная схема радиопеленгатора с последовательным обзором пространства
Прием
излучений производится последовательно во времени одной антенной. В качестве
приемников используются приемники супергетеродинного типа. Излучения, принятые
антенной, усиливаются, преобразуются по частоте и поступают на выходное
устройство. В качестве последнего для визуального наблюдения применяется
индикатор электронно-лучевой трубки (ЭЛТ). Выходное устройство сопряжено с
антенным устройством. Линия развертки на индикаторе ЭЛТ перемещается синхронно
с изменением положения максимума ДНА, образуя шкалу пеленгов. При приеме
антенной излучения источника на экране индикатора образуется амплитудная или
яркостная отметка. Положение отметки на шкале пеленга определяет угловое
положение источника относительно заданного направления. Отсчет пеленга производится
по максимальному значению амплитуды сигнала на экране индикатора.
Прием
излучения источника и соответственно определение его пеленга при поисковом
методе пеленгации носят вероятностный характер, что является недостатком
метода. Этот недостаток может оказаться существенным при разведке РЭС,
работающих в импульсном режиме, кратковременно работающих РЭС и РЛС, работающих
в режиме обзора пространства. Так как просмотр разведываемого пространства
производится последовательно во времени, то некоторые сигналы указанных РЭС
могут быть пропущены (источник в момент излучения находится вне «поля зрения»
антенны пеленгатора). Кроме того, при поисковом методе время, требуемое для
определения пеленга, больше чем при беспоисковом. Оно зависит также всего от
скорости вращения ДНА пеленгатора.
.5
Методы и устройства измерения разности дальностей от источников ЭМИ
Определение
разности дальностей от источника ЭМИ возможно только при приеме его сигналов в
двух пространственно разнесенных точках с известными координатами [4]. Оно
сводится к измерению разности времен распространения  электромагнитного излучения от источника до этих
точек:
электромагнитного излучения от источника до этих
точек:
 , (4)
, (4)
где
 - время распространения излучения от источника до
первой и второй приемных точек.
- время распространения излучения от источника до
первой и второй приемных точек.
Разность
 пропорциональна разности дальностей
пропорциональна разности дальностей  . Поэтому по измеренному временному интервалу и известной скорости с распространения
электромагнитных волн определяется искомая разность дальностей:
. Поэтому по измеренному временному интервалу и известной скорости с распространения
электромагнитных волн определяется искомая разность дальностей:
 . (5)
. (5)
При
отсчете абсолютные величины времени не имеют значения, так
как сигнал источника, принимаемый в одной из точек, используется в качестве
опорного (начало отсчета временного интервала).
В
зависимости от режима излучения разведываемого РЭС (импульсный или непрерывный)
для измерения разности дальностей могут использоваться импульсный (временной) и
корреляционный методы.
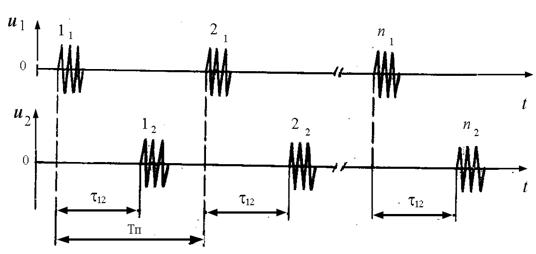
Импульсный
(временной) метод [4] применим только при приеме сигналов РЭС, работающих в
импульсном режиме. Измеритель разности дальностей D12 представляет
собой идентичные приемные устройства, расположенные в двух пунктах, разнесенных
на базу d (рис. 15,а).
Каждый
из сигналов импульсной последовательности (радиоимпульсы  ), принятый в одной из точек (например, в точке 1),
после усиления и преобразования (в частности, из последовательности
радиоимпульсов в последовательность видеоимпульсов, рис. 15,б) ретранслируется
в другую приемную точку - пункт совместной обработки сигналов (пункт измерения
временного интервала ).
), принятый в одной из точек (например, в точке 1),
после усиления и преобразования (в частности, из последовательности
радиоимпульсов в последовательность видеоимпульсов, рис. 15,б) ретранслируется
в другую приемную точку - пункт совместной обработки сигналов (пункт измерения
временного интервала ).
В
точке 2 принятая последовательность радиоимпульсов источника ( ) подвергается аналогичным преобразованиям. Кроме
того, в этой точке указанная последовательность задерживается на фиксированное
время
) подвергается аналогичным преобразованиям. Кроме
того, в этой точке указанная последовательность задерживается на фиксированное
время  , компенсирующее время задержки (распространения)
первой импульсной последовательности в канале связи (ретрансляции). Затем обе
импульсные последовательности подаются на измеритель временных интервалов для
измерения .
, компенсирующее время задержки (распространения)
первой импульсной последовательности в канале связи (ретрансляции). Затем обе
импульсные последовательности подаются на измеритель временных интервалов для
измерения .
а
б
Рис.
15. Импульсный измеритель разности дальностей:
а
- структурная схема; б - временные диаграммы
Корреляционный
метод измерения разности дальностей [4] пригоден при излучении источником как
импульсных, так и непрерывных сигналов, в том числе и шумоподобных. В основу
корреляционного метода положено сравнение сигналов по их статистическим характеристикам.
Одной из таких характеристик является взаимно корреляционная функция (ВКФ)
сигналов РЭС, принимаемых в разнесенных точках. Устройства, реализующие
корреляционный метод измерения разности дальностей, принято называть
корреляционно-базовыми устройствами или системами (КБС). При применении КБС
координаты источника ЭМИ могут быть определены в результате совместной взаимно
корреляционной обработки сигналов одних и тех же источников, принятых в
разнесенных точках.
Для
пояснения сущности метода и структуры построения КБС измерения разности
дальностей предположим, что источник излучает непрерывный шумоподобный
стационарный сигнал и(t).
Для
статистической радиотехники наибольшие значения имеют три моментные функции
низших порядков - математическое ожидание, дисперсия и функция автокорреляции
[27].
Математическое
ожидание
есть
среднее значение процесса X(t) в текущий момент времени t; усреднение
проводится по всему ансамблю реализаций процесса.
Дисперсия
 ,
,

позволяет
судить о степени разброса мгновенных значений, принимаемых отдельными
реализациями в фиксированные моменты времени t.
Двумерный
центральный момент
называется
функцией автокорреляции случайного процесса. Эта функция характеризует степень
статистической связи случайных величин, которые наблюдаются при t=t1 и t=t2,
 .
.
Процесс
называется стационарным, если функции распределения зависят от взаимных
расположений моментов времени, но не от самих моментов
 ,
,
то
есть распределение вероятностей n-го порядка зависит только от n-1 разностей:
 - не
зависит от момента времени,
- не
зависит от момента времени,
 .
.
В
этом случае математическое ожидание и дисперсия не зависят от времени, а
автокорреляционная функция определяется только разностью времен:
 -
-
это
линейная статистическая связь между мгновенными значениями одного и того же
стационарного случайного процесса.
Нормированная
автокорреляционная функция
называется
также коэффициентом корреляции или взаимно корреляционной функцией (ВКФ), для
нее  .
.
Итак,
полагаем, что сигнал и(t) распространяется по различным путям и принимается в
двух пространственно разнесенных точках. ВКФ принятых сигналов и1(t) и
и2(t) и, в частности, сигналов на выходах антенны равна
 , (6)
, (6)
где
τ
- сдвиг по времени; черта означает
усреднение по времени.
В
соответствии с алгоритмом (6) система взаимно корреляционной обработки [4]
включает в свой состав устройство перемножения входных сигналов и1(t) и
и2(t) и интегратор, производящий интегрирование результата
перемножения. При наличии статистической взаимно корреляционной связи между
сигналами и1(t) и и2(t) на выходе перемножителя действует постоянная
составляющая. Постоянная составляющая проходит через интегрирующее устройство,
уменьшающее флюктуации отклика на выходе.
Упрощенная
структурная схема разностно-дальномерной КБС представлена на рис. 16.
Рассмотрим
функционирование КБС при приеме сигнала одного источника. Сигналы и1(t) и
и2(t), принятые антеннами А1 и А2, усиливаются в УРЧ,
преобразуются на промежуточную частоту ωпр и усиливаются в УПЧ. Тракты усиления и преобразования независимых
приемных устройств должны быть идентичными. Сигналы на выходах УПЧ
коррелированы, так как порождены одним источником. Нарушение взаимной
корреляции сигналов на выходах приемников может вызываться различием параметров
сред распространения сигнала от источника к приемным пунктам и неидентичностью
амплитудно- и фазочастотных характеристик приемных устройств.
Выходные
сигналы одного из приемных устройств (сигналы с выхода  ) ретранслируются в другую приемную точку. Сигналы с
выхода
) ретранслируются в другую приемную точку. Сигналы с
выхода  задерживаются на τd для
компенсации времени распространения сигнала и2(t) в линии
связи.
задерживаются на τd для
компенсации времени распространения сигнала и2(t) в линии
связи.
Рис.
16. Структурная схема корреляционного измерителя разности дальностей
Задержанный
на τd
сигнал подается затем на устройство регулируемой задержки и с его выхода - на
перемножитель устройства взаимно корреляционной обработки.
Таким
образом, на выходе перемножителя действуют смеси сигналов и шумов двух
независимых приемных трактов. Перемножение напряжений внутренних шумов
приемников создает на выходе устройства взаимно корреляционной обработки только
флюктуационную составляющую напряжения (внутренние шумы независимы), а
перемножение сигналов источника наряду с флюктуационной составляющей и
регулярную (постоянную) составляющую. Последняя пропорциональна значению ВКФ
принимаемых сигналов и1(t) и и2(t). Изменяя величину τз регулируемой линии задержки, можно установить
значение выходного напряжения, пропорциональное максимальному значению ВКФ.
Значение τз в этом случае будет соответствовать разности времен
распространения сигнала τ12 от источника до антенн  и
и  .
.
.6
Ошибки определения линии положения
Местоположение
источника ЭМИ (без учета ошибок измерения геометрических величин) определяется
[4] как точка пересечения линий положения. Так как точность измерения
геометрических величин ограничена, то линии положения определяются с ошибками.
Вместо линий положения имеют дело с областями возможных положений источника
ЭМИ. Следовательно, и местоположение источника определяется не точкой, а
областью, в пределах которой он может находиться. Размеры области зависят от
ошибок измерения геометрических величин.
В
зависимости от причин, порождающих ошибки, их подразделяют на методические,
аппаратурные (инструментальные) и ошибки за счет влияния внешних условий, в
которых проводятся измерения.
Методические
ошибки обусловлены несовершенством выбранного метода измерений геометрического
параметра. Так, например, ошибки измерения пеленга при использовании метода
максимума в амплитудных радиопеленгаторах будут больше, чем при использовании
метода минимума или метода сравнения.
Причины
аппаратурных ошибок - схемные и конструктивные недостатки технических средств,
реализующих метод измерений: недостаточная чувствительность выходных устройств
(индикаторов) к изменению измеряемого параметра, погрешности градуировки шкал
приборов, используемых для отсчета величины измеряемого параметра, и т.п.
К
ошибкам, обусловленным влиянием внешних условий, относят ошибки за счет
изменения условий распространения электромагнитных излучений от источника к
приемным пунктам в реальной среде, а также за счет воздействия помех от внешних
источников ЭМИ.
Каждая
из указанных причин может приводить к появлению систематических и случайных
ошибок измерения.
Систематические
ошибки независимо от числа измерений имеют постоянные величину и знак. К таким
ошибкам можно отнести, например, ошибки, возникающие из-за асимметрии диаграммы
направленности антенны относительно максимума, минимума или равносигнального
направления (при применении амплитудного метода пеленгации), ошибки из-за
неидентичности параметров приемных устройств (при применении временного и
корреляционного методов определения разности дальностей) и т.д.
Величину
и знак систематических ошибок в принципе можно установить заранее и учесть при
определении истинного значения измеряемой величины. Поэтому в дальнейшем они
рассматриваться не будут.
Случайные
ошибки обусловливаются множеством причин, действующих различным образом при каждом
отдельном измерении одной и той же геометрической величины. Величина и знак
этих ошибок от измерения к измерению различны.
Зависимость
линейной ошибки определения линии положения от ошибки измерения геометрической
величины может быть установлена с использованием элементов теории скалярного
поля.
Геометрической
характеристикой скалярного поля являются поверхности уровня, представляющие
собой геометрическое место точек И рассматриваемой области пространства, в
которых значение поля и(И) равно постоянной величине:
и(И)
=и(х, у, z) = const.
Применительно
к скалярным полям измеряемых геометрических величин (пеленг, разность
дальностей, рис. 17) поверхность уровня представляет собой поверхность
положения - плоскость, гиперболоид вращения.
Поверхности
уровня позволяют качественно судить о скорости изменения скалярного поля по
тому или иному направлению. Количественной характеристикой скорости изменения
поля и(x,y,z) по некоторому направлению l является его
производная ди/дl в данной точке И по этому направлению.
а
б
Рис.
17. К ошибкам определения линии положения
Максимум
производной скалярного поля в точке И будет в направлении градиента поля и.
Градиент поля направлен по нормали к поверхности уровня, т. е. в сторону
максимального изменения скалярной величины:
 . (7)
. (7)
где
п - направление градиента поля. Модуль градиента поля на плоскости равен
 ,
,  . (8)
. (8)
Уравнение
линии постоянного пеленга (рис. 17,а) в прямоугольной системе координат имеет
вид
 .
.
Модуль
градиента поля и определим, исходя из выражений:
 ,
,  ,
,
 ,
,
 .
.
где
D - дальность между источником ЭМИ и пунктом приема.
Заменяя
частные производные конечными приращениями, получим ошибку Δn
определения линии положения источника ЭМИ в зависимости от ошибки измерения Δu
геометрической величины:
 . (9)
. (9)
Из
выражения (9) следует, что ошибка определения линии положения прямо
пропорциональна ошибке измерения геометрической величины.
Найдем
ошибки определения линий положения при пеленгации источника ЭМИ и при измерении
разности дальностей от него.
Подставляя
значение |grad u| в выражение (9), найдем ошибку
определения линии положения при пеленгации источника излучения:
 , (10)
, (10)
где
 φ - ошибка измерения пеленга в радианах, или
φ - ошибка измерения пеленга в радианах, или
 , (11)
, (11)
где
 - ошибка измерения пеленга в градусах.
- ошибка измерения пеленга в градусах.
Среднеквадратическая
ошибка определения линии равных пеленгов
 . (12)
. (12)
Из
выражений (11) и (12) следует, что ошибка определения линии равных пеленгов
пропорциональна дальности от приемного пункта до источника излучения: чем
больше дальность до источника, тем ниже точность определения направления на
источник. На больших дальностях величина ошибок может быть существенной. Так,
например, при ошибке измерения пеленга, равной 2°, и дальностях до источников
излучения 10 и 100 км ошибка определения линий положения составляет
соответственно 3,5 и 35 км. Отметим также то, что для пеленгационных систем
коэффициент пропорциональности между ошибками измерения геометрической величины
и ошибками определения линий положения не зависит от направления на источник.
Иными словами, эти системы по величине ошибки являются всенаправленными.
Найдем
градиент для линии постоянной разности дальностей (рис. 17,б):
 ,
,
 ,
,
 ,
,

 (13)
(13)
В
этом выражении α
- внутренний угол между
радиусами-векторами D1 и D2, соединяющими приемные пункты с источником ЭМИ.
Ошибка определения линии положения при пеленгации источника излучения:
 .
.
.7
Методы определения местоположения источников ЭМИ
По
совокупности измеряемых геометрических параметров системы определения
местоположения источников ЭМИ подразделяются [4]:
· на триангуляционные (угломерные, пеленгационные);
· разностно-дальномерные;
· угломерно-разностно-дальномерные.
Вид и количество измеряемых геометрических величин определяют
пространственную структуру системы определения местоположения источника ЭМИ:
количество пространственно разнесенных приемных пунктов сигналов источника ЭМИ
и геометрию их расположения.
Триангуляционный (угломерный, пеленгационный) метод основан на
определении направлений (пеленгов) на источник ЭМИ в двух точках пространства с
помощью радиопеленгаторов, разнесенных на базу d (рис. 18,а).
а
б
Рис.
18. Пояснение триангуляционного метода определения местоположения источника ЭМИ
на плоскости (а) и в пространстве (б)
Если
источник ЭМИ располагается в горизонтальной или вертикальной плоскости, то для
определения его местоположения достаточно измерить два угла азимута φ1 и φ2 (или
два угла места). Местоположение источника ЭМИ определяется точкой пересечения
прямых О1И и О2И - двух линий положения.
Для
определения местоположения источника в пространстве измеряют углы азимута φ а1 и φ а2 в
двух разнесенных точках О1 и О2 и угол места φм1 в одной из этих точек или, наоборот, углы места φм1 и φм2 в
двух точках приема и угол азимута φ а1 в одной из них (рис. 18,б).
Расчетным
путем может быть определена дальность от одной из приемных точек до источника
по измеренным углам и известной величине базы d:
 ,
,  ,
,  ,
,
отсюда
приравняем два выражения для h:
 ,
,
 .
.
Таким
образом, дальность до источника
 .
.
Триангуляционный
метод прост в технической реализации. Поэтому широко применяется в системах
радио- и РТР, в пассивных радиолокационных разнесенных системах при обнаружении
и определении координат излучающих объектов.
Существенным
недостатком триангуляционного метода является то, что при увеличении количества
источников ЭМИ, находящихся в зоне действия радиопеленгаторов, могут
происходить ложные обнаружения несуществующих источников (рис. 19). Как видно
из рис.19, наряду с определением координат трех истинных источников И1, И2 и И3
обнаруживаются и шесть ложных источников ЛИ1, …, ЛИ6. Исключить ложные
обнаружения при применении триангуляционного метода можно путем получения
избыточной информации о пеленгуемых источниках - увеличением количества
разнесенных радиопеленгаторов или опознаванием принадлежности получаемой
информации к определенному источнику. Опознавание может быть проведено при
сравнении сигналов, принимаемых радиопеленгаторами, по несущей частоте, периоду
следования и длительности импульсов
Рис.
19. Пояснение ложных обнаружений несуществующих источников ЭМИ
Дополнительную
информацию об источниках получают и за счет взаимно корреляционной обработки
сигналов, принимаемых в разнесенных точках пространства.
Устранение
ложных обнаружений при применении триангуляционного метода возможно также за
счет получения данных о разности дальностей от источника излучения до пунктов
приема (пунктов расположения радиопеленгаторов). Если точка пересечения линий
пеленгов не лежит на гиперболе, соответствующей разности дальностей, то она
является ложной.
Разностно-дальномерный
метод определения местоположения основан на измерении с помощью РЭС разности
дальностей от источника ЭМИ до пунктов приема, разнесенных в пространстве на
расстояние d. Местоположение источника на плоскости находится как
точка пересечения двух гипербол (две разности дальностей, измеренные в трех
приемных пунктах), принадлежащих различным базам А1А2, A2A3
(рис. 20). Фокусы гипербол совпадают с точками расположения пунктов приема.
Рис.
20. Пояснение разностно-дальномерного метода определения источников ЭМИ
Пространственное
положение источников ЭМИ определяется по трем разностям дальностей, измеряемым
в трех-четырех приемных пунктах. Местоположение источника - точка пересечения
трех гиперболоидов вращения.
Угломерно-разностно-дальномерный
метод определения местоположения предполагает измерение с помощью РЭС разности
дальностей от источника ЭМИ до двух разнесенных приемных пунктов и измерение
направления на источник в одном из этих пунктов.
Для
определения координат источника на плоскости достаточно измерить азимут φ и разность дальностей АД от источника до точек приема.
Местоположение источника определяется точкой пересечения гиперболы и прямой.
Для
определения положения источника в пространстве необходимо дополнительно
измерить в одной из точек приема угол места источника ЭМИ. Местоположение
источника находится как точка пересечения двух плоскостей и поверхности
гиперболоида.
· двух пеленгов в триангуляционных системах;
· двух разностей дальностей в разностно-дальномерных системах;
· одного пеленга и одной разности дальностей в
угломерно-разностно-дальномерных системах.
При центрированном гауссовском законе распределения ошибок определения
линий положения среднеквадратическое значение ошибки определения местоположения
источника:
 ,
,
где
 - дисперсии ошибок определения линий положения; r -
коэффициент взаимной корреляции случайных ошибок определения линий положения Л1
и Л2; γ
- угол пересечения линий положения.
- дисперсии ошибок определения линий положения; r -
коэффициент взаимной корреляции случайных ошибок определения линий положения Л1
и Л2; γ
- угол пересечения линий положения.
При
независимых ошибках определения линий положения r = 0.
При
триангуляционном методе определения местоположения источника
 .
.
Среднеквадратическая
ошибка определения местоположения
 .
.
При
применении идентичных радиопеленгаторов 
 .
.
Наибольшая
точность будет при пересечении линий положения под прямым углом (γ = 90°).
При
оценке ошибок определения местоположения источника в пространстве необходимо
рассматривать ошибки измерения трех геометрических величин. Ошибка определения
местоположения зависит в этом случае от взаимной пространственной ориентации
поверхностей положения. Наивысшая точность определения положения будет при
пересечении нормалей к поверхностям положения под прямыми углами.
.
Способы определения и запоминания частоты сигналов разведываемых РЭС
3.1 Способы определения несущей частоты сигналов
Несущая частота - один из основных параметров, подлежащих определению при
ведении РТР.
Для
ее определения разведывательный приемник должен принимать сигналы во всем
предполагаемом диапазоне частот РЭС. Поэтому одна из основных характеристик
разведывательного приемника является диапазон разведываемых частот  р.
р.
Просмотр
разведываемого диапазона может осуществляться: последовательно во времени
(поисковый метод) и одновременно по всем диапазону (беспоисковый).
Поисковые
способы [4] определения частоты сигналов требуют определенного времени на
просмотр диапазона р, минимальная полоса пропускания приемника много
меньше р . Указанный способ реализуется в панорамных
одноканальных приемниках прямого усиления и супергетеродинных приемниках,
перестраиваемых по частоте.
Беспоисковые
способы [4] реализуются:
· в многоканальных приемниках прямого усиления или
супергетеродинного типа;
· в приемниках оптико-электронного типа;
· в приемниках, использующих устройства функционального типа.
Многоканальный прием основан на принципе разбиения разведываемого
диапазона частот с помощью полосовых фильтров на ряд достаточно узких частотных
поддиапазонов по частям.
Оптико-электронные приемники сочетают радиотехнические устройства с
оптическими, что позволяет реализовать мгновенное преобразование Фурье.
Функциональный измеритель использует зависимость величины выходного
напряжения от несущей частоты.
Функциональные измерители бывают следующие (курсивом выделены наиболее
распространенные):
· интерференционного типа;
· дисперсионного типа;
· поляризационного типа;
· корреляционного типа.
Существуют комбинированные (поисковые+беспоисковые) способы, которые
реализуют преимущества и свободны от недостатков поисковых и беспоисковых
методов.
.2 Поисковые способы определения частоты сигналов
Сущность поисковых методов [4] определения частоты иллюстрируется рис. 2
а
б
Рис.
2 К поисковому способу определения частоты
На
рис. 21 обозначено: Tnp - период перестройки частоты приемника; Tnpf
- время, в течение которого приемник перестраивается на ширину его полосы
пропускания, то есть время, в течение которого разведываемый сигнал может
наблюдаться на выходе приемника; Δ fnp - ширина
полосы пропускания приемника; Δfp - диапазон разведываемых частот. Эти параметры
связаны соотношениями:
tgα=Δfp /Tnp = Δfпp /Tnpf, Tnpf =Δfnp /Δfp ·Tnp,
Δ fp = fp max - fp min.
Для
детального исследования параметров сигнала желательно иметь Tnpf
большим. Выполнить это можно за счет расширения полосы пропускания приемника Δfnp .
Увеличение
полосы пропускания приемника Δfnp ухудшает разрешающую способность по частоте и точность ее определения.
Увеличение
периода перестройки приемника Tnp приведет к увеличению времени, необходимого для
просмотра всего разведываемого диапазона частот.
Разрешающая
способность по частоте и точность определения частоты f
определяется шириной полосы пропускания приемника Δfnp,
а среднеквадратическая ошибка измерения частоты
f= (0.1…0.2) Δ fnp .
Как
правило, в разведывательных приемниках выполняется
Δ fnp << Δfp .
В
зависимости от соотношения параметров Δ fnp , Δfp , Tnp различают:
· медленный поиск;
· быстрый поиск;
· поиск со средней скоростью.
При медленном поиске - время перестройки приемника на ширину его полосы
пропускания составляет не менее N
периодов следования Tn разведываемых
импульсных сигналов
Tnpf ≥NTn ,
где N - минимально необходимое для
измерения несущей частоты количество импульсов, которое должно поступить на
вход приемника.
При выполнении условия Tnpf ≥NTn вероятность обнаружения сигнала и
определения его частоты равна
При быстром поиске время перестройки приемника на ширину его полосы
пропускания не превышает длительности импульса τи разведывательных сигналов Tnpf
≤τи. Вероятность пропуска сигнала при
выполнении этого условия равна 0, а вероятность определения его частоты за
время, равное периоду следования входных импульсных сигналов, равна
При этом полоса пропускания разведывательного приемника должна быть
относительно широкой.
Чтобы искажения сигналов были минимальными, необходимо, чтобы соотношение
между скоростью перестройки разведывательного приемника по частоте и полосой
пропускания приемника Δfnp было
С ростом необходимо расширять Δfnp, а это приводит к уменьшению
точности определения частоты.
При поиске по частоте со средней скоростью:
NTn·Δfp/Δfnp > Tnp > τи .
Если перестройка разведывательного приемника по частоте осуществляется по
линейному закону, то несущая частота разведываемого РЭС может равновероятно
находиться в любой части рабочего диапазона, то вероятность приема сигнала за n циклов перестройки
радиоразведовательного приемника (РРП):
Wn=1 -
(1- W1)n,
где W1 - вероятность приема сигнала за
один период перестройки.
При заданной вероятности обнаружения сигнала Wзад=Wn,
найдем количество необходимых циклов перестройки:
(1 - W1)n=1 - Wзад,
n·ln(1 - W1)=ln(1 - Wзад)
,
n= ln(1 - Wзад)/
ln(1 - W1);
отсюда время перестройки (разведки)
tp=n·Tnp.
.3 Беспоисковые способы определения частоты
Беспоисковые способы определения частоты [4] обеспечивают одновременный
прием сигналов в диапазоне разведываемых частот без перестройки гетеродинов или
частотных фильтров.
Многоканальные приемники используют разбиение разведываемого диапазона на
множество поддиапазонов. Это достигается использованием набора одноканальных
приемников, полосы пропускания которых примыкают друг к другу (рис. 22,а).
Отдельный канал включает в себя полосовой фильтр, амплитудный детектор,
усилитель и индикатор. Имеется общее регистрирующее устройство, к которому
подводятся сигналы с выходов всех каналов.
Если полосы пропускания всех каналов одинаковы и равны Δfпp , то
Δfp=nΔfnp .
Точность измерения частоты и разрешающая способность по частоте принимают
равной полосе пропускания i-го
канала δf= Δfnpi .
а
б
Рис.
22. Полосы пропускания фильтров многоканальных приемников
Структурная
схема многоканального приемника прямого усиления представлена на рис. 23.
Максимальная
ошибка определения частоты Δfmax=Δfnpi/2.
Если
РРП предназначен для приема сигналов в широком диапазоне частот, то
целесообразно применять каналы с различными полосами пропускания (рис. 22,б),
что позволяет сохранить постоянной по диапазону относительную ошибку измерения.
Матричный
приемник (рис. 24) содержит n столбцов по m строк в каждом [4]. От антенны
принятые сигналы поступают на m фильтров с одинаковыми полосами пропускания Δfnp1,
которые разбивают диапазон разведываемых частот Δfp на m равных частей Δfnp1= Δfp/m, образуя
первый столбец матричного приемника. Резонансные частоты фильтров сдвинуты друг
относительно друга на полосу пропускания фильтра. Колебания, прошедшие через
любой из фильтров, с помощью гетеродинов первого столбца преобразуются в
колебания первой промежуточной частоты и подводятся к УПЧ1, имеющему полосу
пропускания Δfnp
Если fс - частота сигнала, то после преобразования она будет
лежать в пределах
f1 - Δfnp1/2 ≤ fc - fг1i ≤ f1 + Δfnp1/2.
Рис.
23. Многоканальный приемник прямого усиления
Фильтры
второго столбца, имеющие полосу пропускания Δfnp2 , делят
полосу пропускания Δfnp1
также в m раз (рис. 25)
Δfnp2=Δfnp1/m= Δfp/m2 и т.д.  .
.
Точность
измерения частоты и разрешающая способность по частоте определяются полосой
пропускания фильтров последнего столбца.
Рис.
24. Матричный приемник
Основной
недостаток - при одновременном приеме двух или нескольких частот возникает
неоднозначность отсчета частоты.
Рис.
25. АХЧ фильтров матричного приемника
Приемник
с реализацией мгновенного преобразования Фурье (МПФ) (рис. 26) использует
сочетание радиотехнических устройств с оптическими устройствами [4].

Рис.
26. Структурная схема приемника с реализацией мгновенного преобразования Фурье
Главным
звеном приемника с реализацией МПФ является акустооптическая дифракционная
ячейка Брегга, состоящая из лазера, пьезоэлектрического преобразователя (ПП) и
кристалла, в котором происходит взаимодействие акустической и световой волн.
Пьезоэлектрический преобразователь преобразовывает высокочастотный сигнал в
волны сжатия и разрежения, которые распространяются в акусто-оптической среде.
Диэлектрическая
проницаемость кристалла
 ,
,
где
Ω
- акустическая частота, рис. 27,в. Длина
волны в акусто-оптической среде будет намного короче, чем длина волны
электромагнитного сигнала, поскольку скорость распространения акустической
волны в данной среде намного ниже, чем скорость света. Так как показатель
преломления среды является функцией плотности вещества, периодические сжатия и
разрежения (рис. 27,а) вызовут модуляцию показателя преломления среды в
пределах всей зоны распространения акустической волны.
В
результате зона распространения преобразуется в дифракционную решетку для
падающего когерентного луча света нормально к направлению акустической волны,
при этом преломляемый лазерный луч будет состоять из очень большого количества
составных лучей, расширяющихся в пространстве (дифракционные полосы).
В
кристалле происходит дифракция света на акустических волнах [10]. Вообще,
различают два вида дифракции, отличающиеся разными дифракционными спектрами:
Рамана-Ната и Брегга. Дифракция Рамана-Ната наблюдается на низких звуковых
частотах и при не слишком большой длине взаимодействия L (рис. 27,в).
При нормальном падении света, то есть параллельно волновому фронту звуковой
волны, дифракционный спектр Рамана-Ната представляет расположенные симметрично
по обе стороны от прошедшего пучка равноотстоящие друг от друга дифракционные
максимумы (рис. 27,б). При наклонном падении света интенсивность максимумов
уменьшается, но их угловые направления остаются неизменными. Угловое
направление дифракционных максимумов θm относительно
нулевого (соответствующего прямо прошедшему свету) определяется формулой
 ,
,  ,
,
где
λ
- длина световой волны, Λ - длина звуковой волны (период акустической решетки,
рис. 27,в), в общем случае
 .
.
О
дифракции Брегга говорят в том случае, когда дифракционный спектр состоит из
двух максимумов, соответствующих значениям  и
и  (рис. 27,г). Интенсивность минус первого максимума
будет наибольшей, если свет падает под углом к волновому фронту акустической
волны, удовлетворяющей условию Брегга
(рис. 27,г). Интенсивность минус первого максимума
будет наибольшей, если свет падает под углом к волновому фронту акустической
волны, удовлетворяющей условию Брегга
 , отсюда
, отсюда  ,
,
где
θб - угол Брегга.
а
б в г
Рис.
27. Ячейка Брегга
Дифракция
Брегга имеет место на высоких частотах при большой длине взаимодействия света с
акустической волной.
Вид
дифракции зависит от величины безразмерного параметра
 .
.
При
Q≤0.3 наблюдается дифракция Рамана-Ната, а при Q≥4π - дифракция Брегга. Большинство акустооптических
приборов работают в режиме дифракции Брегга.
Таким
образом, изменение показателя преломления приводит к отклонению лазерного луча
на угол, пропорциональный длине волны входного сигнала, чем выше частота, тем
больше угол отклонения.
Если
соответствующая линза помещена после акусто-оптической зоны взаимодействия, то
можно фокусировать первичный луч света, преломляемый ячейкой, в точке фокальной
плоскости. Поскольку точка изображения зависит от направления прихода луча
света, то устанавливается взаимно-однозначная зависимость между частотой и
точками в фокальной плоскости линзы.
При
одновременном поступлении на вход приемника нескольких сигналов различных
частот дифракция света будет происходить под различными углами,
соответствующими этим частотам. Приемник с МПФ аналогичен многоканальному приемнику,
число каналов в нем равно числу фотодетекторов.
Функциональные
измерители несущей частоты [4] подключаются к выходному высокочастотному
каскаду приемника, выходное напряжение или ток которых является функцией
частоты приходящего сигнала.
Интерференционный
измеритель (рис. 28) позволяет осуществлять измерения частоты во всем рабочем
диапазоне без пропусков.
Рис.
28. Структурная схема интерференционного измерителя несущей частоты
Принятые
антенной сигналы поступают на входной фильтр, полоса пропускания которого
определяет ширину полосы рабочих частот. После широкополосного усилителя
радиочастот (УРЧ) и амплитудного ограничителя сигналы поступают к волноводному
тракту.
На
входе волноводного тракта амплитуда напряжения постоянна  .
.
На выход
волноводного тракта сигнал поступает по прямому тракту и по ответвителю:
где
 - скорость распространения волны в волноводном
тракте; то есть амплитуда на выходе детектора
- скорость распространения волны в волноводном
тракте; то есть амплитуда на выходе детектора  -
функция частоты.
-
функция частоты.
С
помощью фильтра выделяется диапазон частот от wmin до wmax (рис. 29).
Рис.
29. Пояснение принципа однозначного определения несущей частоты
В
пределах от wmin
до wmax
фазовый сдвиг составляет
 ,
,  ,
,
где
n - целое число, равное отношению времени
распространения на участке Dl к периоду ВЧ колебаний,
 .
.
Откуда
ширина диапазона разведываемых частот
 ,
,
изменяя
Dl
можно регулировать Df.
Изменяя
величину разности длин прямого и разветвленного участков волновода, можно
изменять ширину диапазона разведываемых частот; при уменьшении Dl ширина
рабочего диапазона интерференционного измерителя возрастает (рис. 30).
Одновременно ухудшается точность измерения частоты, так как уменьшается средняя
крутизна функции.
Рис.
30. Зависимость Df от
разности длин участков волновода Dl
Если
Dl задана, то Df= const;
коэффициент перекрытия по частоте
 .
.
Здесь
изменению п соответствуют различные участки используемого частотного диапазона
(Dl= const).
При п = 1 kf достигает максимального значения, равного двум. При п→∞
kf →l.
В
основу корреляционного измерителя частоты [4] положена зависимость
автокорреляционной функции от частоты. Структурная схема корреляционного
измерителя частоты показана на рис. 3
Рис.
31 Структурная схема корреляционного измерителя несущей частоты
Сигнал,
принятый антенной, подается на широкополосный усилитель (ШУС), а затем на
умножитель. Этот же сигнал подается на умножитель через линию задержки (ЛЗ).
Значения
этих напряжений соответственно
 и
и  ,
,
где
tз - время задержки.
Выходное
напряжение на выходе схемы умножения
 .
.
После
прохождения низкочастотного фильтра с коэффициентом передачи kФ напряжение
 .
.
Значение
автокорреляционной функции при фиксированном tз зависит от
амплитуды и частоты исходного процесса. Квадратичный детектор служит для
устранения зависимости автокорреляционной функции от амплитуды сигнала.
Выходное
напряжение квадратичного детектора фильтра с коэффициентом передачи kд:
 .
.
Регистрирующее
устройство измеряет отношение амплитуд
 .
.
Измерение
несущей частоты с помощью частотных дискриминаторов (ЧД) основано на свойстве
ЧД преобразовывать отклонение частоты от заданного значения в напряжение (рис.
32), пропорциональное величине и знаку этого отклонения.
Рис.
32. Дискриминационная характеристика ЧД
Структурная
схема приемника с частотным дискриминатором показана на рис. 33.

Рис.
33. Структурная схема приемника с частотным дискриминатором
Принятый
сигнал после усиления в широкополосном усилителе подается на дискриминатор,
выходной сигнал которого после детектирования и усиления поступает на
горизонтальные отклоняющие пластины электронно-лучевой трубки. Немодулированные
гармонические колебания наблюдаются на экране индикатора в виде одной линии. Частотно-модулированный
сигнал - в виде двух линий, угловое расстояние между которыми зависит от
девиации частоты.
Рассматриваемый
приемник обеспечивает определение частоты разведывательной РЭС при условии, что
принимаемые сигналы не совпадают по времени. Иначе принимаемые сигналы вызовут
на экране линию, положение которой будет определяться вектором суммирования
принимаемых сигналов.
Комбинированные
способы определения частоты сигналов [4] реализуются путем использования
различного сочетания приемников беспоискового и поискового типов:
широкополосные РПрУ и узкополосные, многоканальные и одноканальные, включенные
последовательно или параллельно в зависимости от конкретных решаемых задач. Это
позволяет сократить время анализа по сравнению с поисковым способом без
ухудшения точности определения частоты или, наоборот, повысить точность,
сократив скорость анализа.
. Анализ структуры сигналов РЭС
.1 Совокупность параметров РЭС, подлежащих радио- и РТР
Устройства измерения параметров сигналов
Радиосигналы РЭС характеризуются вполне определенной совокупностью
параметров [4], которые описывают их свойства:
· пространственные;
· временные;
· энергетические;
· поляризационные;
· спектральные;
· корреляционные и др.
При РТР измеряются параметры радиосигнала, которые дают о нем наиболее
полное представление и позволяют произвести распознавание типа РЭС. Так, при
анализе импульсных радиосигналов наибольший интерес представляют временные
параметры импульсной последовательности:
· длительность τи;
· период повторения Тп импульсов;
· длительность Тпач пачки импульсов;
· период повторения Тпач пачек импульсов;
· законы внутриимпульсной модуляции частоты;
· коды импульсов.
Радио- и РТР непрерывных радиосигналов позволяет определить:
· вид и параметры модуляции;
· временные характеристики модулирующих сигналов;
· спектральные характеристики модулирующих сигналов;
· корреляционные характеристики модулирующих сигналов.
Измерение параметров радиосигналов возможно с использованием
· цифровых устройств;
· аналоговых устройств;
· комбинированных устройств.
Упрощенная структурная схема цифрового измерителя параметров радиосигнала
(устройства цифровой обработки - УЦО) представлена на рис. 34. Измеритель
состоит из приемного тракта (ПТ), аналого-цифрового преобразователя (АЦП),
блока цифровых вычислений (БЦВ) и блока управления (БУ).
В приемном тракте осуществляются прием, усиление и селекция радиосигналов
в заданной полосе несущих частот. Операция преобразования аналоговой величины
параметра сигнала в цифровую форму выполняется в АЦП. Измерение величины
параметра производится в БЦВ. Алгоритм вычислений задается БУ. Выбор способа
регистрации определяется требуемым быстродействием.
Рис.
34. Упрощенная структурная схема устройства цифровой обработки сигналов
Аналоговые
устройства измерения вычисляют значения параметров сигналов, являющиеся
непрерывной функцией значений исходного сигнала.
Комбинированные
устройства измерения параметров сигналов содержат в различных сочетаниях
аналоговые и цифровые измерители.
При
цифровой обработке аналоговую величину (t)
необходимо преобразовать в цифровой код (рис. 35). Такое преобразование
осуществляется квантованием (дискретизацией) величины (t) по
времени и уровням.
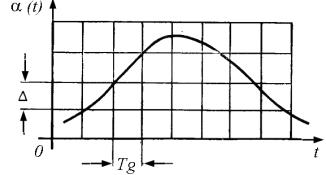
Рис.
35. Дискретизация сигналов по времени и уровням
Чем
меньше интервал дискретизации, тем точнее отображается исходная функция (t) и
меньше ошибки квантования по времени. Однако при этом увеличивается и объем
обрабатываемой информации, что требует увеличения как объема памяти, так и
быстродействия устройства обработки информации.
.2
Цифровые устройства измерения временных параметров сигналов
Измерение
длительности импульсов. Для измерения длительности импульсов [4] применяется
метод счета тактовых (эталонных) импульсов в течение времени действия входного
импульса (сигнала). Счет импульсов обычно производится двоичным цифровым
счетчиком, причем:
перед
поступлением каждого входного импульса счетчик устанавливается в нулевое
состояние 00…0;
поступление
тактовых импульсов на вход счетчика происходит после появления импульса u1>0
(рис. 36) и прекращается после пропадания импульса u
Для
регистрации импульсов, повторяющихся с частотой Fп, длительность
которых изменяется от импульса к импульсу, используется устройство, структурная
схема которого показана на рис. 37. Здесь входной импульс uвх
подается на дифференцирующую цепь (ДЦ). Импульс u1>0
устанавливает триггер в положение, при котором схема И открывает доступ
тактовым импульсам u2 на вход счетчика. Импульсы u1 с выхода ДЦ
подаются также на ограничитель сверху, пропускающий только импульс u1<0,
который инвертируется схемой НЕ. Положительный импульс с выхода этой схемы
устанавливает триггер Ту в положение, при котором схема И прекращает
поступление импульсов на вход счетчика. Число импульсов, зафиксированное в
счетчике, пропорционально длительности измеряемого импульса. Сформированный в
счетчике цифровой код считывается через вентили Вc при
воздействии на них импульса считывания u4 и передается
в другое устройство для дальнейшей обработки информации. Для подготовки всего
устройства к обработке следующего входного сигнала uвх служит
импульс u5 с выхода ЛЗ2 (рис. 36 и 37), который устанавливает
счетчик в исходное нулевое состояние 00. . .0.
Тактовые
(эталонные) импульсы вырабатываются высокостабильным генератором тактовых
импульсов (ГТИ) с периодом повторения Тт. Длительность измеренного импульса τи≈NTT. Наибольшая методическая ошибка в измерении
длительности импульса равна периоду Tт тактовых импульсов.
Относительная величина этой ошибки:
 .
.
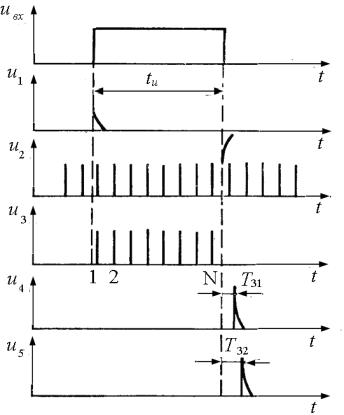
Рис.
36. Графики, поясняющие принцип действия цифрового измерителя длительности
импульсов
Рис.
37. Цифровой измеритель длительности импульсов
Если
длительность измеряемых импульсов τи =1 мкс, а допустимая величина ошибки  , то для
получения указанной точности потребуются тактовые импульсы с весьма малым
периодом повторения
, то для
получения указанной точности потребуются тактовые импульсы с весьма малым
периодом повторения  мкс (fт=10 МГц) и соответственно с весьма малой
длительностью - около 10…20 нс. При большой же длительности измеряемых
импульсов возникают трудности конструирования ЛЗ.
мкс (fт=10 МГц) и соответственно с весьма малой
длительностью - около 10…20 нс. При большой же длительности измеряемых
импульсов возникают трудности конструирования ЛЗ.
Измерение
периода следования импульсов. Структурная схема цифрового измерителя периода
следования импульсов [4] изображена на рис. 38. Основными элементами устройства
являются: генератор тактовых импульсов (ГТИ), счетчик тактовых импульсов, схемы
И, управляющий триггер Ту и вентили Вс считывания цифрового кода.
Рис.
38. Измеритель периода следования импульсов
Работа
рассматриваемого устройства иллюстрируется временными диаграммами (рис. 39).
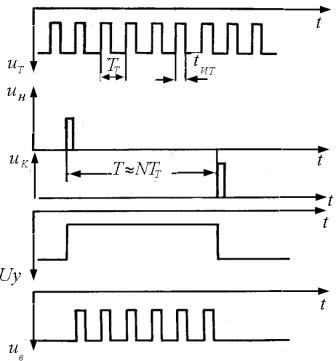
Рис.
39. Графики, поясняющие принцип действия измерителя периода следования
импульсов
ГТИ
вырабатывает периодическую (с периодом ТТ) последовательность положительных
импульсов. Короткий импульс uн, возникающий одновременно с началом анализируемого
процесса, длительность которого подлежит измерению, переключает триггер Ту,
управляющий схемой И, в состояние, при котором схема И пропускает импульсы uТ на
вход счетчика импульсов (триггер То). С этого времени производится счет
тактовых импульсов до момента появления импульса uк, фиксирующего
окончание анализируемого процесса. Импульс uк подается на
другое плечо триггера Ту и переключает его, в результате чего схема И закрывает
доступ тактовых импульсов на вход счетчика. Счет импульсов на этом заканчивается.
Цифровой
код числа N поступивших на вход счетчика тактовых импульсов
определяет длительность Т процесса (с точностью примерно до периода ТТ
длительность  ). Полученный в счетчике цифровой код числа N
считывается посредством вентилей Вс, управляемых импульсом считывания.
). Полученный в счетчике цифровой код числа N
считывается посредством вентилей Вс, управляемых импульсом считывания.
Измерение
периода синусоидальных колебаний. При измерении периода синусоидальных
колебаний Тх могут использоваться цифровые измерители [4], рассмотренные ранее.
В процессе измерения Тх необходимо выделить границы периода по моментам
переходов синусоидального колебания через нуль. Эта операция осуществляется
усилителем-формирователем (УФ), структурная схема которого приведена на рис.
40,а.
Для
исключения зависимости длительности от амплитуды необходимо увеличить крутизну
колебания в области переходов через нуль. Это достигается за счет усиления
сигнала в усилителе (У), его ограничения в ограничителе (Огр) на определенном
уровне (рис. 40,б) и дифференцирования полученного сигнала дифференцирующей
цепью (ДЦ). Для управления работой последующего ключа (Кл) обычно используют
типовой узел (рис. 40,в), на вход которого через диоды Д проходят только
импульсы отрицательной полярности, на последние реагируют триггеры Тг.
При
достаточно больших значениях коэффициента передачи усилителя форма
ограниченного сигнала близка к прямоугольной, т. е. можно считать, что передний
фронт импульсов после дифференцирующей цепи практически совпадает с моментами
перехода измеряемого напряжения через нулевой уровень (рис. 40, б).
Вариант
структурной схемы устройства измерения периода Тх показан на рис. 41, а. В
устройстве используется заполнение периода Тх импульсами опорной частоты f0 от
генератора импульсов ГИ (рис. 41, б). Если на счетчик ЦС поступило N
импульсов, то  .
.

а
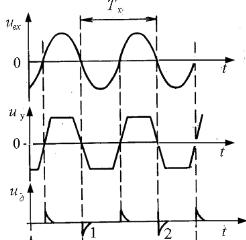
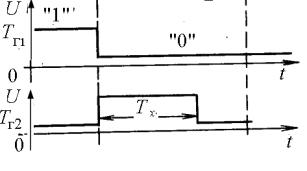
б
в
Рис.
40. Структурная схема устройства измерения периода синусоидальных колебаний
(а), его временная диаграмма работы (б) и структурная схема типового
триггерного узла (в)
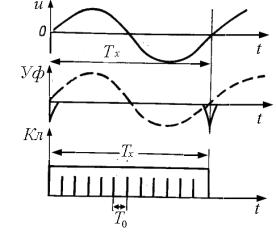
а
б
Рис.
4 Структурная схема устройства измерения периода синусоидальных колебаний (а) и
временные графики его работы (б)
Относительная
погрешность квантования в процентах D=100/N=100Т0/Тх=100fх/f0,
т. е. растет прямо пропорционально fх. Поэтому временное
преобразование применимо для измерения параметров только низкочастотных
процессов (примерно до 1000 Гц).
Нижний
предел по частоте определяется емкостью счетчика, например, при Nmах=
106 и f0=106 Гц , fх min =1 Гц.
.3
Аналоговые устройства измерения временных параметров сигналов
Для
измерения периода следования импульсов Тп используют различные устройства.
Структурная схема одного из таких устройств [4] приведена на рис. 42. Принцип
действия устройства поясняется графиками, приведенными на рис. 43.
Рис.
42. Структурная схема устройства измерения периода следования импульсов
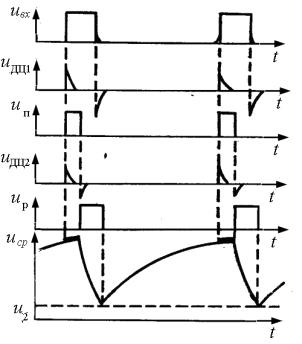
Рис.
43. Графики, поясняющие принцип действия устройства измерения периода
следования импульсов
Входной
импульс поступает на первую дифференцирующую цепочку (ДЦ1), исключающую влияние
длительности входных импульсов на работу схемы. Первый положительный импульс
ДЦ1 запускает схему формирования импульса подсвета (ИП). Импульсы подсвета
подаются на управляющий электрод электронно-лучевой трубки (ЭЛТ).
Яркостная
отметка на экране трубки появляется только в момент поступления импульсов
подсвета. Параллельно импульсы подсвета подаются на вторую дифференцирующую
цепочку (ДЦ2). Отрицательный импульс ДЦ2 запускает схему формирования импульсов
разряда (ИР). Импульсы разряда подаются на схему развертки (СР).
Рассматриваемое
устройство позволяет определить период следования по двум соседним импульсам.
.4
Определение вида и параметров модуляции непрерывных сигналов
В
современных РЭС широко используют АМ и ЧМ-радиосигналы. Для определения вида
модуляции необходимо принятый сигнал подать одновременно на амплитудный (АД) и
частотный (ЧД) детекторы [4]. В последнем случае необходимо предварительно
ограничить сигнал по амплитуде в усилителе-ограничителе (УО). Структурная схема
устройства, применяемого для определения параметров модуляции непрерывных
сигналов, изображена на рис. 44. С выходов АД и ЧД напряжение поступает на
коммутатор (К).
Рис.
44. Структурная схема устройства измерения параметров модуляции непрерывных
сигналов
Если
на вход разведывательного приемника поступает частотно-модулированный (ЧМ)
сигнал, то на выходе ЧД будет переменное напряжение, а на выходе АД -
постоянное. Если на вход приемника поступает амплитудно-модулированный (АМ)
сигнал, то наоборот. Форму и параметры модулирующего напряжения непрерывных
сигналов можно определить, используя ЭЛТ. На вертикально отклоняющую систему
подается переменное напряжение с выхода АД или ЧД. На управляющий электрод
трубки поступают сигналы генератора масштабных меток (ГММ), модулирующие луч по
яркости.
Период
модулирующего напряжения разведываемых сигналов определяют с помощью
калибрационных меток ГММ.
При
неточной настройке приемника на частоту разведываемого сигнала его частотная
модуляция вызывает паразитную амплитудную модуляцию (АМ) выходных сигналов. В
свою очередь, АМ не проявляется на выходе ЧД только при идеальном ограничении
принимаемых сигналов по амплитуде. Указанные факторы снижают точность
измерений.
Одним
из методов определения угловых координат и автоматического сопровождения цели
по направлению, используемых в РЛС, является метод конического сканирования
[4]. При этом методе информация о координатах цели содержится в огибающей
амплитуды радиосигналов, отраженных от нее, и ее фазе.
Структурная
схема устройства, предназначенного для измерения частоты сканирования диаграммы
направленности антенны разведываемого РЭС, представлена на рис. 45.

Рис.
45. Структурная схема устройства измерения частоты сканирования диаграммы
направленности антенны
Входные
радиосигналы, модулированные по амплитуде с частотой сканирования, с выхода
усилителя поступают на детектор. Последний выделяет огибающую частоты
модуляции, которая подается на фильтр. Ширина полосы пропускания фильтра
определяется возможным диапазоном частот сканирования разведываемых РЭС.
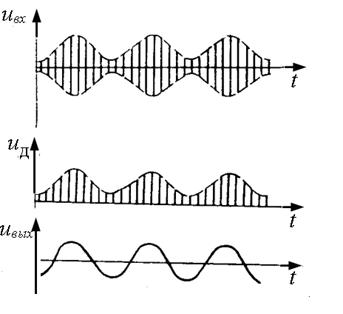
Рис.
46. Графики, поясняющие принцип действия устройства частоты сканирования
Выделенная
огибающая может быть использована для измерения частоты сканирования или для
модуляции помеховых сигналов (рис. 46) при создании радиопомех РЭС.
При
определении частоты сканирования в качестве выходных устройств можно
использовать различные схемы измерителей частоты - цифровые измерители частоты
или индикаторы на ЭЛТ.
.5
Анализ спектров радиоизлучений
Цифровые
методы и устройства спектрального анализа. Спектр электромагнитного излучения в
некотором диапазоне частот определяется совокупностью амплитуд напряжений
различных частот. Следовательно, устройства анализа спектров должны
обеспечивать измерение амплитуды и частоты каждой гармоники исследуемого
процесса.
При
частотном анализе периодический радиосигнал может быть представлен рядом Фурье:

где
Сm - амплитуда:  , ω0 - несущая частота, Ω -частота повторения, ψm - начальная фаза.
, ω0 - несущая частота, Ω -частота повторения, ψm - начальная фаза.
Сигнал
u(t) и его спектральная плотность U(ω) взаимно-однозначно связаны обратным и прямым преобразованием
Фурье [28]:
 ,
,  .
.
В
практике исследования сигналов типична такая ситуация [28]: непрерывный сигнал s(t) на
интервале времени (0,Т) описывается своими отсчетными значениями, взятыми
соответственно в моменты времени (0,Δ,…(М-1)Δ).
Массив этих чисел, вещественных или
комплексных, является той единственной информацией, по которой можно судить о
спектральных свойствах сигнала. Методика изучения таких дискретных сигналов
состоит в том, что полученная выборка отсчетных значений мысленно повторяется
бесчисленное число раз. В результате сигнал становится периодическим.
Периодические сигналы всегда имеют дискретные спектры, образованные
равноотстоящими спектральными линиями. Структурная схема цифрового анализатора
спектра [4] изображена на рис. 47.
Для обработки отсчетов по алгоритму дискретного преобразования Фурье
(ДПФ) необходимо накопить реализацию длительностью Т, то есть М отсчетов
сигнала.

Рис.
47. Структурная схема цифрового анализатора спектра
Алгоритм ДПФ позволяет по временным отсчетам определить комплексный
дискретный спектр :
 ,
,  ,
,
 ,
,
где
h - весовой коэффициент, определяемый объемом выборки.
Это осуществляется буферным накопителем, на вход которого поступают кодовые
комбинации с выхода АЦП. После умножения анализируемой реализации на требуемую
выделяющую функцию отсчеты сигнала поступают в блоки, производящие вычисления
по алгоритму ДПФ, и по полученным отсчетам комплексного спектра рассчитываются
коэффициенты спектра амплитуд Сm. При этом объем вычислений, а, следовательно, и
время, затраченное на него, определяется числом одновременно обрабатываемых
отсчетов М.
Результаты
окончательного вычисления спектра сигнала могут индицироваться на ЭЛТ так же,
как в аналоговом спектроанализаторе, и могут быть использованы для дальнейшей
автоматизированной обработки результатов спектральных измерений.
В
настоящее время разработаны алгоритмы быстрого преобразования Фурье,
позволяющие сократить время вычислений.
Аналоговые устройства спектрального анализа. Спектральный анализ сигналов
осуществляется параллельными, последовательными и комбинированными
устройствами.
Сущность параллельного частотного анализа [4] заключается в том, что все
частотные составляющие в определенной полосе частот, называемой полосой обзора,
выявляются одновременно и практически мгновенно.
Структурная схема параллельного устройства приведена на рис. 48. В
широкополосном тракте (ШПТ), в состав которого входят все каскады от входной
цепи до смесителя, происходит усиление составляющих анализируемого спектра до
уровня, необходимого для нормальной работы последующих элементов анализатора. В
смесителе (См) спектр преобразуется в область более низких (обычно
промежуточных) частот, которые поступают в узкополосные фильтры. Каждый фильтр
откликается на воздействие частотной составляющей, находящейся в пределах его
полосы пропускания. Точность измерения частот спектральных составляющих будет
определяться шириной полосы пропускания каждого фильтра. Общее число фильтров
должно быть таким, чтобы их суммарная полоса пропускания равнялась полосе
обзора.
Рис.
48. Анализатор спектра сигналов параллельного типа
Сущность
последовательного частотного анализа [4] состоит в том, что частотные
составляющие исследуемого радиоизлучения в определенной полосе обзора
выявляются последовательно. Широко используются панорамные устройства с
перестройкой резонатора (рис. 49) и с перемещением спектра по оси частот. В
процессе перестройки резонатора его частота, плавно изменяясь, последовательно
совпадает с частотными составляющими исследуемого радиоизлучения.
Для
определения частоты каждой составляющей спектра и частотного интервала между
ними перестройка резонатора должна быть согласована по времени с процессом
отображения результатов анализа на индикаторе. Для этого используется генератор
развертки (ГР), обеспечивающий перестройку резонатора синхронно с
горизонтальной разверткой луча на индикаторе. В качестве индикатора применяют
ЭЛТ. На экране ЭЛТ будут наблюдаться импульсы, которые расположены вдоль линии
развертки соответственно частотным составляющим исследуемого процесса.

Рис.
49. Анализатор спектра сигналов последовательного типа
Устройства
последовательного спектрального анализа применяют при исследовании процессов,
характер которых изменяется достаточно медленно по сравнению со временем
ведения анализа. При исследовании быстро меняющихся процессов или
кратковременных радиоизлучений последовательный анализ возможен лишь при их
периодическом повторении причем периодичность повторения должна быть выше или
во всяком случае соизмерима с периодом просмотра полосы обзора.
Комбинированный
частотный анализ [4] основан на комплексном использовании в одном панорамном
устройстве параллельного и последовательного анализаторов спектров. При
комбинированном анализе можно реализовать преимущества каждого анализатора,
сочетая их в различных вариантах. Анализ ведется одновременно с помощью
большого числа резонаторов, но напряжение с них снимается последовательно
(поочередно) (рис. 50). Комбинированный анализ используется в тех случаях,
когда необходимо сократить время анализа или когда последовательный анализ
невозможен из-за очень широкой общей полосы обзора. Физические процессы в
резонансных системах комбинированных устройств не отличаются от процессов в
параллельных и последовательных устройствах комбинированного типа.
Рис.
50. Структурная схема панорамного анализатора
Литература
1. Нелинейная
динамика и управление. Выпуск 5; ФИЗМАТЛИТ - Москва, 2007. - 400 c.
. Александровская
А.Н. Автоматика. 2-е изд., стер. Александровская А.Н.; Гостехиздат - Москва,
2013. - 996 c.
. Андреев В.
А., Бурдин А. В., Кочановский Л. Н., Портнов Э. Л., Попов В. Б. Направляющие
системы электросвязи. В 2 томах. Том 2. Проектирование, строительство и
техническая эксплуатация; Горячая Линия - Телеком - Москва, 2010. - 424 c.
. Андреев В.
А., Портнов Э. Л., Кочановский Л. Н. Направляющие системы электросвязи. В 2
томах. Том 1. Теория передачи и влияния; Горячая Линия - Телеком - Москва,
2009. - 424 c.
. Антипов Б.
Л., Сорокин В. С., Терехов В. А. Материалы электронной техники. Задачи и
вопросы; Лань - Москва, 2003. - 208 c.
. Галперин В.
А., Данилкин Е. В., Мочалов А. И. Процессы плазменного травления в микро- и
нанотехнологиях; Бином. Лаборатория знаний - Москва, 2010. - 288 c.
. Гольдштейн
Б. С. Системы коммутации. Учебник для вузов; БХВ-Петербург - Москва, 2004. -
318 c.
. Гоноровский
И. С. Радиотехнические цепи и сигналы; Дрофа - Москва, 2006. - 720 c.
. Громов Д.
Г., Мочалов А. И., Сулимин А. Д., Шевяков В. И. Металлизация ультрабольших
интегральных схем; Бином. Лаборатория знаний - Москва, 2009. - 280 c.
. Дмитриев А.
С., Панас А. И. Динамический хаос. Новые носители информации для систем связи;
ФИЗМАТЛИТ - Москва, 2002. - 252 c.
. Дмитриев В.
И., Григорян В. Л., Катенин В. А. Навигация и лоция; Моркнига - Москва, 2009. -
472 c.
. Егупов
Н.Д., Пупков К.А. (Ред.) Методы классической и современной теории
автоматического управления. В 5 томах. Том 5. Методы современной теории
автоматического управления; МГТУ им. Н. Э. Баумана - Москва, 2004. - 784 c.
. Запечников
С. В., Милославская Н. Г., Толстой А. И., Ушаков Д. В. Информационная
безопасность открытых систем. В 2 томах. Том 2. Средства защиты в сетях;
Горячая Линия - Телеком - Москва, 2008. - 560 c.
. Казеннов Г.
Г. Основы проектирования интегральных схем и систем; Бином. Лаборатория знаний
- Москва, 2005. - 296 c.
. Калугин Н.
Г. Электропитание устройств и систем телекоммуникаций; Академия - Москва, 2011.
- 192 c.
. Козачок В.
И., Семкин С. Н., Крюков О. В., Смирнов С. В., Карнаев Ю. С. Теоретические
основы построения систем документальной электросвязи; Горячая Линия - Телеком -
Москва, 2011. - 248 c.
. Королев М.
А., Крупкина Т. Ю., Путря М. Г., Шевяков В. И. Технология, конструкции и методы
моделирования кремниевых интегральных микросхем. В 2 частях. Часть 2. Элементы
и маршруты изготовления кремниевых ИС и методы их математического
моделирования; Бином. Лаборатория знаний - Москва, 2009. - 424 c.
. Костров Б.
В., Ручкин В. Н. Архитектура микропроцессорных систем; Диалог-МИФИ - Москва,
2007. - 304 c.
. Кузьмин А.
В., Схиртладзе А. Г., Борискин В. П. Основы построения систем числового
программного управления; ООО "ТНТ" - Москва, 2012. - 200 c.
. Логвинов В.
В., Фриск В. В. Схемотехника телекоммуникационных устройств, радиоприемные
устройства систем мобильной и стационарной радиосвязи, теория электрических
цепей; Солон-Пресс - Москва, 2011. - 656 c.
. Лурье Б.
Я., Энрайт П. Дж. Классические методы автоматического управления; БХВ-Петербург
- Москва, 2004. - 628 c.
. Меньков А.
В., Острейковский В. А. Теоретические основы автоматизированного управления;
Оникс - Москва, 2005. - 640 c.
. Морозов В.
К., Рогачев Г. Н. Моделирование информационных и динамических систем; Академия
- Москва, 2011. - 384 c.
. Музылева И.
Элементная база для построения цифровых систем управления; Техносфера - Москва,
2006. - 144 c.
. Першин В.
Т. Основы радиоэлектроники и схемотехники; Феникс - Москва, 2006. - 544 c.
. Полещук В.
И. Задачник по электронике. Практикум; Академия - Москва, 2011. - 160 c.
. Рангайян Р.
М. Анализ биомедицинских сигналов. Практический подход; ФИЗМАТЛИТ - Москва,
2007. - 440 c.
. Росляков А.
В. Оконечное оборудование сети ISDN; Горячая Линия - Телеком - Москва, 2008. -
104 c.
. Сергиенко
А. Б. Цифровая обработка сигналов; БХВ-Петербург - Москва, 2011. - 768 c.
. Шмид Дитмар
, Бауман Альбрехт , Кауфман Ханс , Зиппель Бернард Управляющие системы и
автоматика; Техносфера - Москва, 2007