Основные погрешности навигационных приборов в мореплавании
Содержание
Введение
Исходные
данные
.
Расчет суммарной инерционной погрешности гирокомпасов
2.
Оценка влияния погрешностей гирокомпаса на точность судовождения
2.1
Оценка возможной погрешности определения места судна
2.2
Оценка погрешностей определения поправки гирокомпаса
2.3
Оценка возможной величины поперечного смещения судна
3.
Магнитный компас
.
Лаг
.
Расчет поправок эхолота
.
Анализ функционирования и эксплуатации ТСС
Заключение
Список
литературы
Введение
На современных судах применяются различные
технические средства, с помощью которых судоводитель получает навигационную
информацию. Гирокомпас, магнитный компас, эхолот, лаг и авторулевой относятся к
группе электронавигационных приборов и занимают существенное место в
обеспечении безопасного процесса навигации судна и управления его движением.
Судоводитель должен в совершенстве владеть навигационным оборудованием и
критически оценивать показания приборов и результаты вычислений.
Целью выполнения данной курсовой работы является
закрепление теоретических и практических знаний, развитие творческих
способностей, возможность на практических примерах оценить и проанализировать
применение перечисленных выше приборов с точки зрения их точности
характеристик, проявляемых в реальных условиях плавания.
Исходные данные
Начальные параметры:= 20 - порядковый номер в
списке группы= 2 - последняя цифра номера группы
m = n + 2 =22
r = 2
Задание 1.(А):
φ = 300
ГКК1=[360+(-1)20*22] = 220
ГКК2=[180+(-1)22*20]=2000
V1= [10+20-16] =14 уз.= [10+22-16] =16 уз.=
7.563•10-4
с-1= 3.718•10-4
с-1
ωd = 13.42•10-4 с-1=
-1.003*10-3(с/м)= 4.259*10-4(с/м)
ѱ= 56.010
Задание 1.(Б):
φ = 300
ГКК1=[360+(-1)20*22] = 220
ГКК2=[180+(-1)22*20]=2000= [10+20-16] =14 уз.
ΔtM = 62 c=
1.236*10-1(с/м)= 1.165*10-1(с/м)= 25,6•10-3 с-1= 3,875•10-1 с-1
ωd = 0,98•10-3 с-1
Задание 2.1.(А):= (20+0.1*22) = 22.2 мили=
(10*20+22) = 2220
ГКП1= (222+130-20) = 3320
ГКП2= (222+50+20) = 2920
tоб = 5400 сек.
Задание 2.1.(Б):= (20+0.1*22) = 22.2 мили=
(10*20+22) = 2220
ГКП1= (222+130-20) = 3320
ГКП2= (222+50+20) = 2920об = 200 сек.
Задание 2.2.(А):
φ =300
ГГК'1=2020
ГГК'2=200'1 =19 уз.'2=11 уз.
tΔГК=0 сек.
Задание 2.2.(Б):
φ =300
ГГК'1=2020
ГГК'2=200'1 =19 уз.'2=11 уз.
tΔГК=0 сек.
Задание 2.3.(А,Б):= 4550 сек. td2 = 6700 - для
ГК "Курс-4"= 1725 сек. td2 = 5200 - для ГК "Вега"
Задание 3. Магнитный компас:
ΔГК = 0,220=
-0.180
Задание
№4. Лаг:и1 = 6.2 уз.
ΔV1 = 0.62
уз.и2 = 12.4 уз.
ΔV2 = 0.92
уз.и3 = 19.6 уз.
ΔV3
=
0.11 уз.
М1
=40+22 = 62
Задание
№5. Эхолот:= 150C= 31‰изм = 240 м
γ
= 320
сэ
= 1500 м/с
Задание
№6. Анализ функционирования и
эксплуатации
ТСС:на гирос
Эксплуатация
авторулевого "Аист", регулировки и настройки
1.
Расчет суммарной инерционной погрешности гирокомпасов
Гирокомпас
"Курс-4" является морским навигационным прибором. Расчетная широта
гирокомпаса составляет 600 N(S). Период незатухающих колебаний ГК по азимуту и
высоте в расчетной широте равен 84,4+/-5 мин., период затухающих колебаний
100+/- 15 мин. Фактор затухания 2,5-6,0. Время прихода ГК в меридиан составляет
2,5-6,0 часов. Погрешность показаний ГК при движении судна с постоянной
скоростью неизменным курсом составляет +/-1,00. При маневрировании судна (вне
расчетной широте) инерционные девиации ГК на быстроходных водоизмещающих судах
могут достигать 4,00.
Задание
1.(А)
Произвести
расчет и построение кривой суммарной инерционной погрешности гирокомпаса
"Курс-4", возникающей в результате маневрирования.
Исходные
условия: в широте φ
судно
производит маневр изменением скорости и курса; при этом ГКК1, V1, ГКК2, и V2 -
курс и скорость судна соответственно до и после маневра.
φ
= 300
ГКК1=[360+(-1)20*22]
= 220
ГКК2=[180+(-1)22*20]=2000=
[10+20-16] =14 уз.= [10+22-16] =16 уз.= 7.563•10-4 с-1= 3.718•10-4 с-1
ωd
= 13.42•10-4 с-1=
-1.003*10-3(с/м)= 4.259*10-4(с/м)
ѱ= 56.010
Выполнение
расчета
1. Рассчитываем
изменение северной составляющей скорости судна ΔVn:
ΔVN
= V2cosГКК2
- V1cosГКК1
ΔVN = - 28.01 уз.
Выражаем
полученную скорость в м/с:
ΔVN
= -28.01•1852/3600 = -14.4 м/с
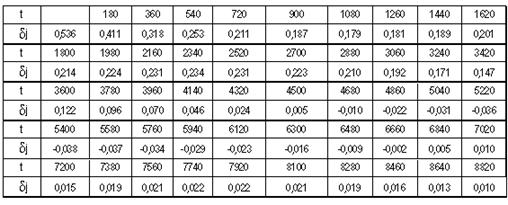
2. С
помощью компьютерной программы Excel по формуле расчета суммарной инерционной
погрешности гирокомпаса рассчитываем значение δj с шагом Δt=180с
δj
= 57,3ΔVn[Ae-mt + Ce-ht sin(ωdt + ѱ)]
Результаты
расчета представлены в таблице
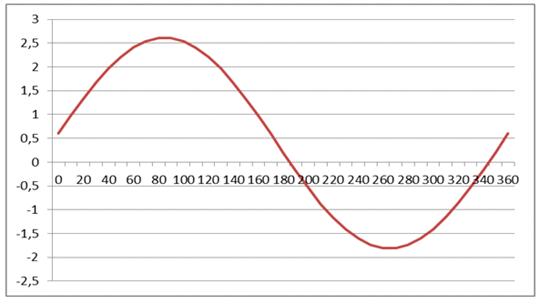
Вывод:
как видно с графика девиация ГК "Курс-4" несколько превосходит в
значении, согласно техническим характеристикам. Это связано с тем, что
эксплуатация ГК производится на широте 800, что значительно больше расчетной
широты.
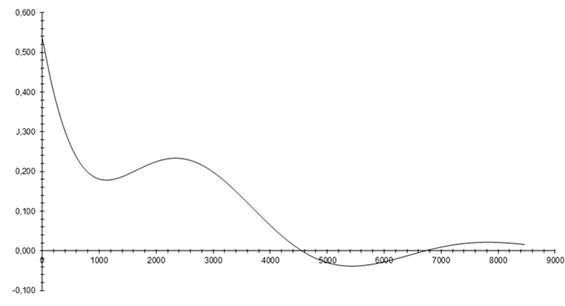
График
суммарной инерционной девиации гирокомпаса "Курс-4"
Задание
1.(Б)
Гироазимуткомпас
"Вега" является морским навигационным прибором и предназначен для
использования на судах в широтах до 800. Он имеет два режима работы: основной -
режим корректируемого гирокомпаса, дополнительный - режим гироазимута.
Погрешность показаний прибора в режиме корректируемого гирокомпаса при плавании
транспортных судов с неизменной скоростью и постоянным курсом составляет
+/-0,80, в диапазоне широт +-700 и 1,50 - в диапазоне широт от 70 до 800.
Скоростная девиация и девиация затухания исключается из показаний ГК путём
коррекции положения ЧЭ. Необходимые корректирующие сигналы формируются в блоке
коррекции по данным внешней информации о скорости судна и широте места.
В
условиях маневрирования судна погрешность корректируемого ГК характеризуется
значением +/-2,00 в широтах до 700 и значением +/-2,50 - в диапазоне широт от
70 до 800 при скорости судна до 50 уз.
Произвести
расчет и построение кривой суммарной инерционной погрешности гирокомпаса
"Вега", возникающей в результате маневрирования.
Исходные
данные: в широте φ
судно
совершает маневр изменением курса при неизменной скорости V, причем поворот
производиться с постоянной угловой скоростью ω. Значение
курса до маневра ГКК1, после - ГКК2, продолжительность маневра Δtm.
Исходные
данные:
φ
= 300
ГКК1=[360+(-1)20*22]
= 220
ГКК2=[180+(-1)22*20]=2000=
[10+20-16] =14 уз.
ΔtM
=
62 c= 1.236*10-1(с/м)= 1.165*10-1(с/м)= 25,6•10-3 с-1= 3,875•10-1 с-1
ωd
= 0,98•10-3 с-1
. Рассчитываем
значение средней угловой скорости поворота сунна ω по формуле:
ω
= (ГКК2
- ГКК1)/57,3• ΔtM
ω
=
0,0501 c-1
. Выражаем
V в м/с:
V=
7.2016 м/с
3. По
формуле рассчитаем значение δj c шагом Δt =180с
δj
= -57,3V ω
[Ne-mt + Me-ht sin(ωdt
+ ѱ)]
Результаты
расчета представлены в таблице:
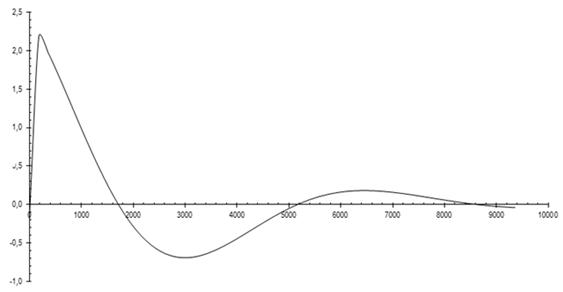
График
суммарной инерционной девиации гирокомпаса "Вега"
2.
Оценка влияния погрешностей гирокомпаса на точность судовождения
2.1
Оценка возможной погрешности определения места судна
Произвести
оценку возможной погрешности определения места судна по двум пеленгам после
маневра, обусловленную инерционной девиацией гирокомпаса.
Исходные
данные: в широте φ
судно
совершает маневр, характеризующийся начальными и конечными значениями скорости
V1, V2 и курса ГКК1 и ГКК2.
В
момент времени обсервации tоб, считая после окончания маневра, определили место
судна по пеленгам ГКП1 и ГКП2 береговых ориентиров О1 и О2, расстояние между
которыми L, азимутальное направление с первого ориентира О1 на второй О2 -А12.
Значения φ, V1, V2,
ГКК1 и ГКК2 такие же как в задании 1.(А).
Задание
2.1(А)= (20+0.1*22) = 22.2 мили= (10*20+22) = 2220
ГКП1=
(222+130-20) = 3320
ГКП2=
(222+50+20) = 2920об = 5400 сек.
. Находим
обратные пеленги:
ОГКП1=
3320 + 1800 = 1520
ОГКП2=
2920 + 1800 = 1120
Из
графика суммарной инерционной погрешности δi, выбираем на момент
обсервации tоб = 5400 с, равному первому экстремуму кривой, δi = -0.040.
. Находим
истинные пеленги:
ИП1=
3320 - 0.040 = 331.90 (ОИП1=151.90)
ИП2=
2920 - 0.040 = 291.90 (ОИП1=111.9
0)
. Выполняем
графическое построения, представленное на рисунке.
. Производим
оценку погрешности rm, допущенную в данном определении места судна, которая
равна 0.1 мили.
Вывод:
как видно из расчетов погрешность определения места судна значительная, поэтому
для обеспечения безопасности мореплавания судоводителю следует учесть девиацию
должным образом так, чтобы судно двигалось согласно нужному курсу, но уже с
учетом данной погрешности и девиации.
Задание
2.1.(Б)
L=
(20+0.1*22) = 22.2 мили= (10*20+22) = 2220
ГКП1=
(222+130-20) = 3320
ГКП2=
(222+50+20) = 2920об = 200 сек.
. Находим
обратные пеленги:
ОГКП1=
3320 + 1800 = 1520
ОГКП2=
2920 + 1800 = 1120
Из
графика суммарной инерционной погрешности δj, выбираем на момент
обсервации tоб = 200 сек., равному первому экстремуму кривой, δj = +2.20.
. Находим
истинные пеленги:
ИП1=
3320 + 2.20 = 334.2 (ОИП1=154.2)
ИП2=
2920 + 2.20 = 294.20 (ОИП1=
114.20)
Выполняем
графическое построения, представленное на рисунке.
Вывод:
как видно из расчетов погрешность определения места судна незначительная, но
это не значит, что следует терять бдительность. Данная погрешность и значение
девиации должны все равно учитываться, чтобы судно как можно точнее двигалось
относительно своего курса, но уже с принятыми поправками.
.2
Оценка погрешностей определения поправки гирокомпаса
Задание
2.2.(А)
Произвести
оценку погрешности определения поправки гирокомпаса по створу после маневра
судна.
Исходные
данные: маневрирование судна производиться в широте φ (равной
широте, указанной задании 1.1.(А) для гирокомпаса "Курс-4"; для
гирокомпаса "Вега" - широте, указанной в задании 1.1.(Б). Курс и
скорость судна до маневра ГКК'1 и V'1, после маневра - ГКК'2 и V'2. В момент
времени tΔГК, считая
после окончания маневра, произвели определение поправки гирокомпаса по створу.
Выполнение:
Исходные
данные:
φ
=300
ГГК'1=2020
ГГК'2=200'1
=19 уз.'2=11 уз.
tΔГК=0 сек.
.
С графика суммарной инерционной погрешности δj для гирокомпаса
"Курс-4" на момент времени tΔгк=0 сек. выбираем δi(Δгк)= 0.540
.
Вычисляем значение
ΔV'N = V'2
cos(ГКК'2) - V'1 cos(ГКК'1) = 27.9531 уз.
и
определяем фактическую величину погрешности:
δi(tΔгк)ф= -0.530
. Находим
значение погрешности:
εΔГК= 0.530
Вывод:
как видно погрешность зависит не только от полученной девиации, но также и от
изменения скорости ΔV'N
- чем
она больше, тем больше погрешность.
Задание
2.2.(Б)
Исходные
данные: φ
=300
ГГК'1=2020
ГГК'2=200'1
=19 уз.'2=11 уз.
tΔГК=0 сек.
.
С графика суммарной инерционной погрешности δj для гирокомпаса
"Вега" на момент времени tΔгк= 0 сек. выбираем δj(Δгк)= -0.140
.
Определяем величину погрешности:
δi(tΔгк)ф =
δj(Δгк)
=- 0,140
.
Находим значение погрешности:
εΔГК= +0,140
2.3
Оценка возможной величины поперечного смещения судна
Оценить
возможную величину поперечного линейного смещения судна, возникающего в
результате инерционной погрешности гирокомпаса после маневрирования.
Найти
значения первого и второго максимальных смещений d1 и d2, а также определить
ширину безопасной полосы движения Δ:
Δ=|d1|+|d2|
Исходные
данные: перед входом в стесненный в навигационном отношении район совершен
маневр, характеристики которого и широта плавания такие же, как в задании 1.1(А)
для гирокомпаса "Курс-4" и задании 1.1.(Б) для гирокомпаса
"Вега".
Задание
2.3.(А)
Управление
судном производится по гирокомпасу "Курса-4"
. С
кривой суммарной инерционной погрешности δj для гирокомпаса
"Курс-4" снимаем значения td1 = 4550 сек.

d1=
124.707 м
Аналогично
подставляя t=6700 в формулу, вычисляем d2=117.24 м.
. Ширина
безопасной полосы движения:
Δ
= |124.707|+117.24
= 241.9525 м.
Выводы:
как видно значение ширины безопасной полосы движения получилось достаточно
большим, что связано очевидно с эксплуатацией данного ГК в высоких широтах, что
приводит к значительным погрешностям.
Задание
2.3.(Б)
Управление
судном производится по гирокомпаса "Вега"
. С
кривой суммарной инерционной погрешности δj для гирокомпаса
"Вега" снимаем значения td1= 1725 сек.
. Максимальное
смещение рассчитывается по формуле:

d1=249.079
Аналогично
подставляя t=5200 в формулу, вычисляем d2=66.08 м
3. Ширина
безопасной полосы движения:
Δ
=
315.16
Выводы:
как видно значение ширины безопасной полосы движения данного ГК в несколько раз
меньше полосы ГК "Курс-4", что связано с несколько большей точностью
данного прибора.
3.
Магнитный компас
На
большинстве транспортных судов используется морской магнитный компас типа
УКП-М. ЧЭ этого курсоуказателя является картушка - магнитная система из шести
стрелок с круговой шкалой для отсчета курса или пеленга. Картушка находится
внутри котелка с жидкостью и опирается на острие шпильки, служащей для центровки
магнитной системы. Сверху на котелок устанавливается пеленгатор, который служит
не только для навигационного пеленгования, но и для выполнения девиационных
работ с применением дефлектора. Основная проверка работоспособности МК - это
определение значения "застоя", т.е. статической погрешности из-за
трения в опоре. Значение "застоя" не должно быть более 0,20 (для
средних широт).
Магнитный
компас является автономным высоконадежным датчиком направления в море, поправка
которого равна сумме магнитного склонения d и девиации δ:
ΔМК=d+δ
Величина
d для данного района плавания снимается с навигационной карты и проводится к
году плавания, а δ
выбирается
из таблицы девиации в зависимости от компасного курса.
Периодически
производится уничтожения девиации магнитного компаса и составление новой
таблицы остаточной девиации. В случае необходимости (когда фактическая девиация
отличается более чем на 20 от табличной) производится исправление таблицы
девиации. В обоих случаях широко используется гирокомпас.
При
выполнении девиационных работ маневрирования судна производится на малом ходу,
поэтому инерционные девиации гирокомпаса пренебрежимо малы и их в расчет не
принимают.
После
уничтожения полукруговой девиации судно поочередно приводили по магнитному
компасу на курсы N,NE,E,SE,S,SW,W,NW. На каждом курсе синхронно сличали
показания магнитного и гироскопического компасов и записали отсчеты курсов Кмк
и Кгк.
Известно
значение склонения d, снятое с карты и приведенное к году плавания, а также
поправка гирокомпаса ΔГК.
Исходные
данные:= 00= 450= 900
SE = 1350= 1800= 2250= 2700= 3150
ΔГК
= 0,220
d
= -0.180
1. Рассчитываем
остаточную девиацию для восьми главных и четвертных курсов по формуле:
δ = Кгк - Кмк
+ ΔГК - d

. Находим
значения коэффициентов девиации:
.
Рассчитываем таблицу остаточной девиации по формуле
δ=A+ВsinK+CcosK+Дsin2K+Ecos2K,
используя
коэффициенты девиации A, B, C, D и E. Результаты представлены в таблице
остаточной девиации
Вывод:
с помощью данных результатов и ниже приведенного графика можно довольно точно
определить девиацию магнитного компаса с тем, чтобы учесть результаты при
подсчетах следуемого курса.
График
остаточной девиац
4.
Лаг
На
судах морского флота широко применяется индукционные лаги для измерения
скорости хода судна относительно воды. Прототипом такого лага является
индукционный лаг ИЭЛ-2М.
Основным
его достоинством является то, что он имеет одинаково высокую точность измерения
на всем диапазоне скоростей. Схема лага обеспечивает высокую стабильность и
точность прибора; при изменении солености морской воды от 2 до 36‰ и
температуры от 2 до 360С инструментальная погрешность лага остается практически
постоянной. С уменьшением солености от 2 до 0,1‰ погрешность лага может
увеличиваться не более чем на 0,1 уз.
Лаг
измеряет скорость судна с некоторой погрешностью, которая должна быть
компенсирована поправкой.
В
общем случае погрешность лага является функцией скорости, которую можно
представить в виде суммы трех составляющих
ΔV=a+bV+f(V)
Где:
а
- постоянная составляющая;- линейная составляющая;(V) - нелинейная
составляющая.
Постоянная
составляющая погрешности в индивидуальном лаге компенсируется при выполнении
регулировки "Установки рабочего нуля". Компенсация линейной
составляющей погрешности производится при выполнении масштабирования.
Нелинейная составляющая погрешности компенсируется применением корректора, ввод
данных в который выполняется по результатам испытаний на мерной линии.
Выполнение:
малый
ход - Vи1 = 6.2 уз., погрешность ΔV1 = 0..61 уз.
средний
ход - Vи2 = 12.4 уз., погрешность ΔV2 = 0.92 уз.
полный
ход - Vи3 = 19.3 уз., погрешность ΔV3 = 0.11 уз.
При
переключении лага в режим "Масштаб" отсчет скорости лага,
соответствующий эталонному напряжению равен:
М1
=40+22 = 62
Рассчитываем
отсчет скорости М2 , который должен показывать лаг при эталонном напряжении, с
учетом введенной линейной поправки лага по формуле:
=62.34
В
первую очередь необходимо построить на миллиметровке зависимость ΔV от Vи в виде
ломаной линии, которую будем называть экспериментальной (пунктирная линия).
Пользуясь
специальным трафаретом, начерченным на прозрачной бумаге, наносим на ту же
миллиметровку вторую ломанную линию - регулировочную, состоящую из трех-четырех
участков, которая должна наилучшим образом совпадать с экспериментальной
линией.
Используя
весовые коэффициенты каждого участка регулировочной линии, устанавливаем
коммутационные перемычки в гнезда корректора. Установка перемычек производится
с помощью технологической панели, которая устанавливается на коммутаторе блока
корректора.
Коммутационные
перемычки при установке соединяют соответствующие гнезда правого и левого ряда.
Три верхние гнезда предназначены для выбора зоны. Первая зона используется,
когда полный ход судна менее 17 уз., вторая - более 17уз., 17 последующих пар
гнезд относятся к установке перемычек "узлы", причем, с левой стороны
панель оцифрована значениями узлов от 1 до 17, а с правой - от 2 до 34
(четные). Оставшиеся 12 пар гнезд используются для установки перемычек
"коэффициенты". Каждому участку соответствует 4 пары гнезд для
установки весовых коэффициентов. При установке первой зоны (максимальная
скорость судна меньше 17 узлов) перемычку необходимо устанавливать таким
образом, чтобы она соединяла верхнее гнездо правого ряда коммутатора с верхним
гнездом левого ряда. Выбор второй зоны (максимальная скорость судна больше 17
узлов) предусматривает установку перемычки так, чтобы она соединяла первое
верхнее гнездо правого ряда со вторым верхним гнездом левого ряда коммутатора.
Таблица
данных для установки коммутационных перемычек
|
Вторая
зона
|
|
Участок
|
|
1
|
2
|
3
|
4
|
|
Узлы
(истинная скорость начала участка)
|
2
|
8
|
12
|
20
|
|
Знак
|
+
|
+
|
-
|
|
|
Коэффициенты
|
1;2;4
|
1;4
|
2;4
|
|
Вывод: согласно установленных перемычек и
графику, теперь на любой скорости судна корректор автоматически вводит поправку
для компенсации нелинейной составляющей погрешности. Следует отметить, что
работа корректора определяется ломаной линией 0-1-А´-В´-С´,
которая не совпадает с ломаной линией 0-А-В-С, характеризующей действительное
значение нелинейной погрешности
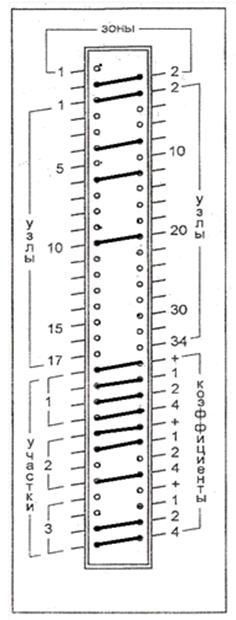
Коммутатор с технологической панелью
5. Расчет поправок эхолота
Навигационные эхолот НЭЛ-5 служит для измерения
глубины под килем судна до 2000 м. В комплект эхолота входят: самописец,
указатель, усилитель, блок посылок, фильтр, излучающая антенна, принимающая
антенна, кабельные коробки. Рабочая площадь излучающей антенны в два раза
больше, чем принимающей. Эхолот рассчитан на скорость звука в воде 1500 м*с-1.
Если действительная скорость звука отличается от расчетной, то при помощи
специального регулятора эхолот можно подстроить и обеспечить исключение
погрешности.
Рассчитать поправку, которой требуется исправить
показания эхолота при отклонении действительной скорости звука в воде с от
расчетной со и если в месте измерения глубины имеется наклон морского дна γ.
Выполнение:
Исходные данные:= 150C= 31‰изм = 240 м
γ = 320
сэ = 1500 м/с
Используя метод линейной интерполяции находим из
таблицы, что при солености S = 31‰ и температуре воды t = 150 C поправка
опорной скорости звука Δс в воде
равна 53.165 м/с.
. Аналогично выбираем из таблицы поправку
за глубину Δсh = 3.964 м/с. для
измеренной глубины hизм = 240 м
. Суммируя поправки Δс,
Δсh
и опорную скорость со получаем скорость звука при заданных условиях
с = 1449,14 + 53.165 + 3.964= 1506.269 м/с.
. Рассчитываем поправку эхолота за
отклонение скорости звука в воде Δhс:
Δhс = hизм (с/сэ -
1)
Δhс =
240*((1506.269/1500) - 1) = 1.003 м
. Рассчитаем поправку за наклон морского
дна, используя формулу:
Δhγ =hизм (secγ
-
1)
. Определяем полную поправку эхолота как
алгебраическую сумму полученных поправок:
Δh = Δhс
+
Δhγ
Δh = 1.003 + 43.01 =
44.021 м.
погрешность компас лаг судовождение
Вывод: в данных расчетах нужно правильно снимать
данные поправок с таблиц для корректного подсчета погрешности.
6. Анализ функционирования и эксплуатации ТСС
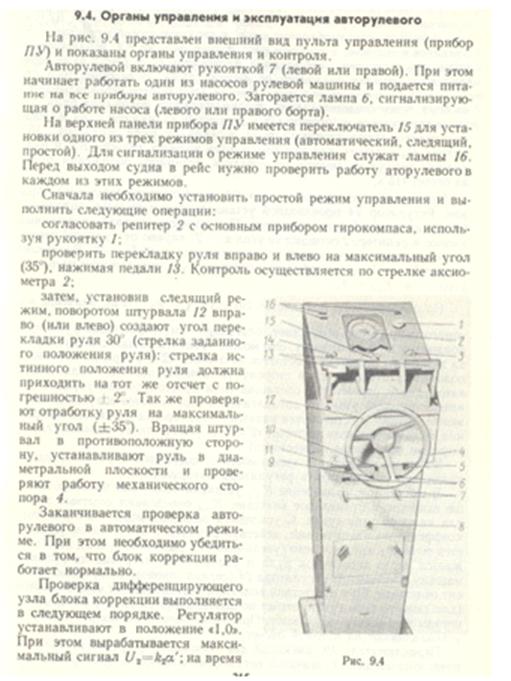
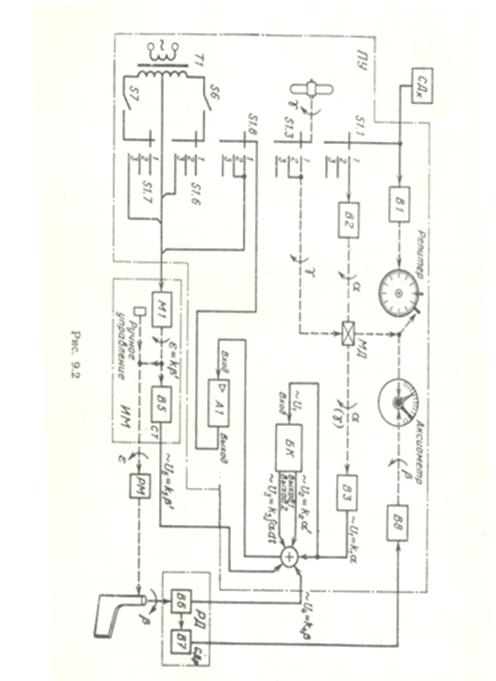
Эксплуатация авторулевого
"Аист", регулировки и настройки.
Заключение
Обеспечение безопасности мореплавания входит в
круг должностных обязанностей капитана и его помощников. Это значит, что
судоводитель должен в совершенстве владеть навигационным оборудованием,
доверять ему, однако критически оценивая показания приборов и результаты
вычислений.
В данной курсовой работе я, пользуясь
теоретическими знаниями, практически находил погрешности каждого из
навигационных приборов, строил графики учета суммарной инерционной девиации гирокомпасов,
давал объяснения по поводу полученных результатов в выводах к каждому заданию и
приводил краткие технико-эксплуатационные данные навигационных приборов.
Список литературы
1. Чапчай
П.А. Электронавигационные приборы. Одесса, 2010 г. - 150 с.
. Чапчай
П.А. Электронавигационные приборы. Методические указания по выполнению курсовой
работы по дисциплине "Электронавигационные приборы". Одесса, 2008г. -
36 с.
. Судовые
измерители скорости / А.А. Хребтов, В.Н. Кошкарев, Б.А. Осюхин и др.:
Справочник. - Л.: Судостроение, 1978, - 286 с.: ил.
. Нечаев
П.А., Кудревич Н.Б. Электронавигационные приборы. Изд. 3-е. Изд-во
"Транспорт", 1974, - 400 с.
. Нечаев
П.А., Григорьев В.В. Магнито-компасное дело: Учебник для мореходных училищ. -
4-е издание, перераб. и доп. М.: Транспорт, 1983 - 239 с.
. Абсолютные
и относительные лаги / К.А. Виноградов, В.Н. Кошкарёв, Б.А. Осюхин, А.А.
Хребтов: Справочник. - Л.: Судостроение 1990.
. Воронов
В.В., Перфильев В.К., Яловенко А.В. Технические средства судновождения:
Конструкция и эксплуатация: Учебник для вузов / Под. ред. Е.Л. Смирнова. - М.:
Транспорт, 1988 - 335 с.