Кинематическое и динамическое исследование строгального станка. Конструкторская разработка одноступенчатого редуктора с внешним косозубым зацеплением
Министерство образования Российской
Федерации
АМУРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Кафедра механики
КУРСОВОЙ ПРОЕКТ
на тему: Кинематическое и
динамическое исследование строгального станка. Конструкторская разработка
одноступенчатого редуктора с внешним косозубым зацеплением.
по дисциплине техническая механика
Исполнитель
студент
гр.246 А.А.Тихонов
Руководитель
зам. зав.
кафедрой, канд. техн. наук С.П.Волков
Нормоконтроль
зав.
лабораторией Н.Н.Гужикова
Благовещенск 2004
Министерство
образования Российской Федерации
АМУРСКИЙ
ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Энергетический факультет
Кафедра АПП и Э (блок механики)
УТВЕРЖДАЮ
Зам. зав. кафедрой
____________С.П. Волков
“_____” ____________
ЗАДАНИЕ
К курсовому проекту студента Тихонова Артема Александровича
1. Тема курсового проекта: Кинематическое и динамическое исследование
механизма строгального станка, а также конструкторская разработка редуктора
утверждена приказом от _______ №_______
. Срок сдачи студентом законченного проекта _________
. Исходные данные к курсовому проекту
) схема выбирается из варианта - 9
) цифровые данные из варианта - 1
. Содержание курсового проекта:
) Провести кинематический анализ механизма строгального станка
графическим и аналитическим методами. Выполнить динамический
анализ машинного агрегата.
) Расчёты элементов редуктора
. Перечень материалов приложения:
Лист 1: Анализ рычажного механизма станка:
) планы положений механизма
) планы скоростей
) планы ускорений
Лист 2: Сборочный чертёж редуктора;
Лист 3: Рабочие чертежи деталей:
) корпус редуктора
) зубчатое колесо
) тихоходный вал
. Консультация по курсовому проекту:
. Дата выдачи задания:
Руководитель курсового проекта Волков С.П.
Задание принял к исполнению (дата):____________________________
РЕФЕРАТ
Проект 74 с., 15 рисунков, 5 источников, 1 приложение.
Рычажный механизм, кинематика, динамика, редуктор, вал, колесо, шестерня,
подшипник, крышка редуктора
В данном курсовом проекте систематизированы, закреплены и расширены
теоретические знания, а также развиты конструкторские навыки.
Произведены динамические и кинематические исследования механизма
строгального станка.
Представлены рекомендации по изготовлению и монтажу опытной конструкции.
СОДЕРЖАНИЕ
Введение
. Кинематический анализ рычажного механизма
.1 Кинематическая схема машинного агрегата
.2 Кинематическая схема исполнительного механизма
.3 Структурный анализ строгального станка
.4 План положений
.5 План скоростей
.6 План ускорений
.7 Построение диаграммы перемещений
.8 Построение диаграммы скоростей
.9 Построение диаграммы ускорений
2. Привод
2.1 Динамический анализ рычажного механизма
.2 Выбор электродвигателя
.3 Выбор редуктора
. Конструирования и расчет цилиндрического зубчатого
редуктора
.1 Расчет зубчатых передач
.2 Проектный расчет валов
.2.1 Быстроходный вал
.2.2 Тихоходный вал
.3 Конструирование зубчатых колес и вала шестерни
.3.1 Установка колеса на валу
.3.2 Подбор посадки с натягом
.3.3 Расчет прочности шпоночного соединения
3.4 Конструирование подшипниковых узлов и расчет сил
.4.1 Определение реакций опор
.4.1.1 Быстроходный вал
.4.1.2 Тихоходный вал
.4.2 Расчет подшипников на заданный ресурс
.4.3 Построение эпюр моментов
.4.4 Расчет крышек подшипников
.4.5 Выбор уплотнительного устройства
.5 Расчет деталей корпуса
.6 Смазка
.7 Выбор муфт
Заключение
Библиографический список
Приложение А. Пример построения плана положений
Приложение Б. Пример построения плана скоростей
Приложение В. Пример построения плана ускорений
Приложение Г. Таблица для определения мощностей рабочего хода
Приложение Д. Построение диаграммы мощностей
Приложение Е. Спецификация
ВВЕДЕНИЕ
СТРОГАЛЬНЫЕ СТАНК
К седьмой группе по классификации, ЭНИМС относят
станки, имеющие прямолинейное движение резания независимо от того, работают ли
они резцами (строгальные и долбежные станки) или протяжками и прошивками
(протяжные станки). В строгальных станках и движение подачи имеет заготовка или
резец. Станки этой группы служат для обработки разнообразных линейчатых
поверхностей, описанных прямой, перемещающейся по направляющей линии, в соответствии
с рисунком 1. Относительное перемещение заготовки и инструмента по направляющей
- линии обеспечивается движением подачи, а по образующей - движением резания.
Движение резания поперечно - и продольно - строгальных станков - всегда
горизонтальное.
Поперечно - строгальные станки применяют в единичном и
серийном производстве для обработки небольших по размерам заготовок. Продольно
- строгальные станки позволяют обрабатывать станины станков, корпусные детали и
т. п.
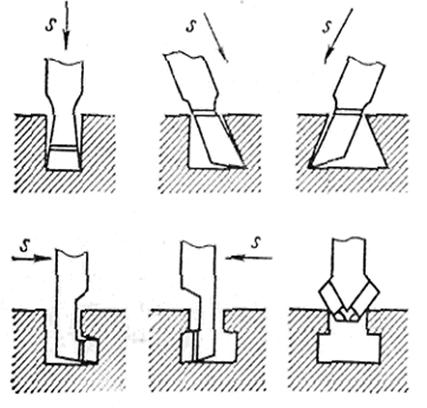
Рисунок 1 - Виды работ, выполняемых на строгальных станках
На рисунке 2 а) показан общий вид поперечно -
строгального станка. В верхних направляющих станины 1 смонтирован ползун 2,
совершающий с помощью кулисного механизма возвратно - поступательное перемещение
(главное движение). На левом конце ползуна укреплен суппорт 3. Он состоит из
поворотного диска 1 показанных на рисунке 2 б) и салазок 2, получающих
периодически вертикальную подачу от ходового винта 3. На салазках смонтирована
резцовая каретка 4 с откидной планкой 5 и резцедержателем 6.
На вертикальных направляющих станины (слева) находится
поперечина 4 в соответствии с рисунком 2 а), по которой в горизонтальной
плоскости перемещается стол 5 (движение подачи). На верхнюю плоскость стола
устанавливают заготовки или тиски и закрепляют их с помощью болтов,
устанавливаемых в Т - образные пазы стола.
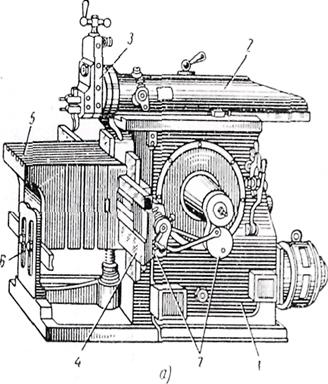
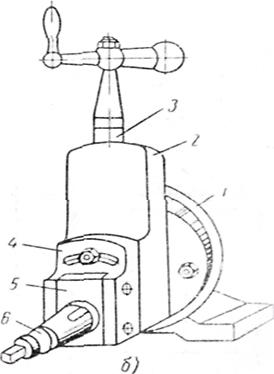
Рисунок - 2 Поперечно - строгальный станок
Плоскости обрабатывают следующим образом. Стол 5 с
поперечиной устанавливают на определенной высоте в зависимости от вертикального
размера заготовки. Для большей жесткости стол дополнительно закрепляют в стойке
6. Процесс строгания, происходит при движении ползуна влево. По окончании
рабочего хода ползун возвращается направо, совершая ускоренный холостой ход, в
конце которого механизм 7 осуществляет периодическую подачу стола вдоль
направляющих поперечин. При отрезных операциях или при обработке вертикальных
плоскостей периодическую подачу совершает суппорт 3.
В двухстоечном продольно - строгальном станке в
соответствии с рисунком 3, стол 3 с помощью реечной передачи перемещается по
призматическим направляющим 1 станины 2. На рабочей плоскости стола
устанавливают и закрепляют заготовки. По обе стороны станины расположены
боковые стойки 4 и 5, скрепленные для жесткости поперечной балкой 6. В
вертикальных направляющих стоек смонтирована траверса 7, несущая два резцовых
суппорта 8 с резцедержателями. С правой стороны станка размещены агрегаты
привода. В зависимости от вертикальных размеров заготовок траверсу
устанавливают на определенной высоте и зажимают. При строгании стол совершает
возвратно - поступательное движение. В конце рабочего хода осуществляется
периодическая подача верхних суппортов 8 в горизонтальном, а боковых суппортов
9 - в вертикальном направлении. В связи с этим резцы, установленные в
резцедержателях суппортов 8, обрабатывают горизонтальные плоскости или
линейчатые поверхности, а в суппортах 9 - боковые.
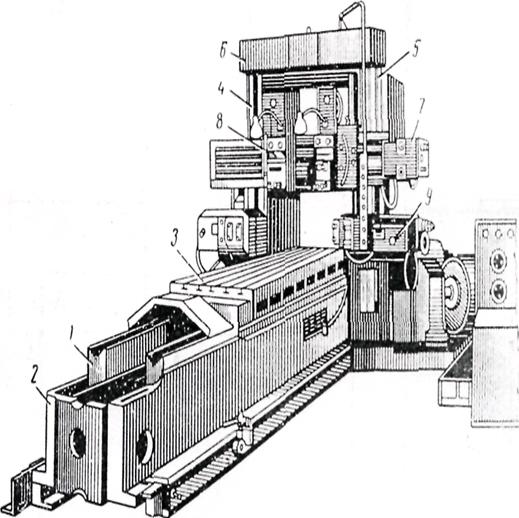
Рисунок - 3 Продольно - строгальный станок
1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ РЫЧАЖНОГ МЕХАНИЗМА
1.1 Кинематическая схема машинного агрегата
Рисунок - 4 Кинематическая схема машинного агрегата
1.2 Кинематическая схема исполнительного
механизма
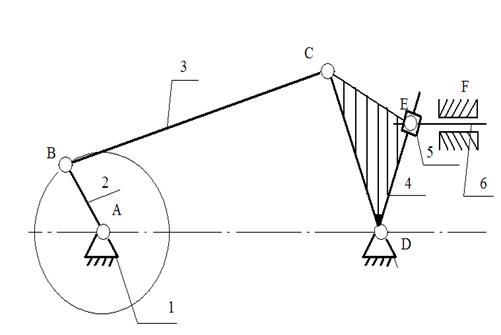
- стойка, 2 - кривошип, 3 - шатун, 4 - кулиса, 5 - камень кулисы
Рисунок - 5 Кинематическая схема строгального станка
1.3 Структурный анализ строгального станка
По формуле Чебышева определим число двигателей, которые приводят
исполнительный механизм.
W=3×n - 2×p5 - p4 (1)`
W=15-14=1
- следовательно исполнительный механизм приводит в действие 1 двигатель.
1.4 План положений
Для построения планов положений механизма выбираем масштабный
коэффициент μ1=0,001 м/мм. Проводим окружность радиусом равным АВ,
так как кривошип АВ совершает полный оборот. Зная длину отрезка DC, получим нулевое и крайнее положения
механизма в точке С. Для нулевого положения из отрезка ВС вычтем отрезок АВ и
на пересечении с отрезком DC,
получим точку С0, а для крайнего положения отрезки АВ и ВС сложим и получим т.
Ск. Для нахождения точки Е, откладываем 25 градусов от отрезка DC и проводим линию до пересечения оси
х - х.
1.5 План скоростей
Для построения планов скоростей механизма выбираем масштабный коэффициент
по формуле:
mv=(ω2×ml)/2 (1)
ω2=(π×n2)/300=36,861 c - 1, (2)
где ω2 - угловая скорость кривошипа;
mv=(ω2×ml)/2=0,0184 (3)
Величина скорости точки А равна нулю.
Величина скорости точки В определяется по формуле
uB=uA+uBA=w2×lАВ (4)
Направление её в соответствии с направлением ω2 перпендикулярно звену АВ.
Отложим от полюса Р расстояние (Рb)=2×АВ (Рb
перпендикулярно АВ)
Скорость точки С находится относительно точек В и D и определяется системой:
uС=uВ+uСВ(5)
uС=uD+uСD
Скорость точки D
равна нулю. Таким образом точку С получаем на пересечении двух перпендикуляров,
от В к С и от D к С.
Скорость точки Е4 определяется из соотношения
(uС/uЕ4)= (lСD/lЕD) (6)
Скорость точки Е5,6 определяем по уже найденным скоростям точек С и D:
uЕ5,6=uС+uСЕ5,6 (7)
uЕ5,6=uD+uDЕ5,6 (8)
и откладывается на пресечении двух перпендикуляров, от С к Е и от D к Е.
Скорость точки F
равна 0.
1.6 План ускорений
Планы ускорений строят по составленным векторным уравнениям, точно в такой
же последовательности с использованием тех же самых приёмов, как и при
построении планов скоростей.
Найдем масштабный коэффициент ускорения по формуле:
mа=m²v/m1 (9)
Так как точка А принимается за стойку, ускорение этой точки равно 0.
Для определения ускорения точки В, совершающей движение по окружности
радиуса, равным длине кривошипа, запишем уравнение.
Для определения ускорения точки С запишем систему:
ас=ав+аnсв+аτсв - относительно точки В (10)
ас=аD+аnсD+аτсD - относительно точки В (11)
откуда находим нормали ускорения точки С относительно точек D и В:
аnсв→(b1 - nCB)=(cb)²/CB (12)
аnсD→(d1 - nCD)=(cd)²/CD (13)
аτсв и аτсD откладываем от найденных нормалей под прямым углом и на
пересечении получаем точку С.
Аналогично находится точка Е4, то есть относительно точек С и D и определяется системой:
аЕ4=аС+аnЕ4С+аτСЕ4 (14)
аЕ4=аD+аnЕ4D+аτDЕ4 (15)
откуда находим нормали ускорения точки Е4 относительно точек D и С:
аnЕ4С→(с1 - nЕ4С)=(cе4)²/CЕ4 (16)
аnЕ4D→(d1 - nЕ4D)=(dе4)²/DЕ4 (17)
Нормали откладываются на чертеже параллельно положению механизма.
аτСЕ4 и аτDЕ4 откладываем от найденных нормалей
под прямым углом и на пересечении получаем точку Е4.
Кориолисово ускорение откладывается под прямым углом по направлению
угловой скорости кулисы и рассчитывается по формуле:
аКЕ5Е4→(е1
- КЕ5Е4)=(2×Ре4/2×DE4)×(е4 - е5) (18)
проведя вектор КЕ5Е4 до оси х - х получим ускорение точки е15,6.
1.7 Построение диаграммы перемещения
Данный метод основан на применении графического дифференцирования функций
положения S(φ),
где φ - угол поворота кривошипа.
Выбираем масштабный коэффициент:
mφ=2×π/120=0,523 (19)
Диаграмма перемещений выходного звена строится следующим образом: по оси
абсцисс откладываем обобщенную координату, то есть угол перемещения входного
звена, таким образом, через  получаем 12 точек. По оси ординат откладываем перемещение
выходного звена в масштабе кривошипа в зависимости от угла поворота входного
звена. При угле
получаем 12 точек. По оси ординат откладываем перемещение
выходного звена в масштабе кривошипа в зависимости от угла поворота входного
звена. При угле  = 0 перемещение точки Е равно нулю, при угле =
= 0 перемещение точки Е равно нулю, при угле =  точка Е перемещается на некоторое
расстояние, которое мы прибавляем к предыдущему значению перемещения точки Е и
откладываем полученное значение при
точка Е перемещается на некоторое
расстояние, которое мы прибавляем к предыдущему значению перемещения точки Е и
откладываем полученное значение при
соответствующем значении угла . Значение перемещения точки Е при
других углах определяется аналогичным образом.
1.8 Построение диаграммы скоростей
Диаграмма перемещений, построенная раннее служит основной для построения
диаграммы скоростей. В начале на диаграмме перемещений проводятся хорды от
начала отсчета до значений перемещений. Затем на диаграмме скоростей
параллельно хордам проводятся прямые из полюса отстоящего от начала координат
на расстояние Н=12 мм и до оси ординат.
Затем на пересечении полученных значений ординат и соответствующих углах
мы получаем значения скоростной точки Е. Однако следует учесть, что углы
смещаются влево на  .
.
1.9 Построение диаграммы ускорений
Диаграмма ускорений строится аналогично диаграмме скоростей. Мы
откладываем хорды на диаграмме скоростей, а затем откладываем отрезки на
диаграмме ускорений на расстоянии Н от начала координат. На диаграмме ускорений
углы смещаются вправо на  .
.
2. ПРИВОД
.1 Динамический анализ рычажного
механизма
В масштабе вычерчиваем зависимость от перемещения точки Е6 рычажного
механизма принадлежащей его входному звену. По горизонтальной оси от начала
координат откладываем перемещения SE6 взятые с планов положения механизма для участка рабочего хода. Перед
этим определим масштабный коэффициент mр:
mр=Pпс/Y псmax (20)
mр=2400/100=24 Н/мм
В этой системе координат строим график линейной зависимости uE6(SE6). Откладываем взятые с плана отрезки uе61, uе62,…, uе6n для участка
рабочего хода.
Примем мощность за N6 от
сил полезного сопротивления при поступательном движении выходного звена.
Nпс(i)= Pпс(i)× uE6(i) (21)
С учетом масштабных коэффициентов можно получить соотношения:
Nпс(i)= y пс×mр× uе6(i)× mu (22)
=190×20×90,5×0,0184=6330,8 Вт
Расчеты производим до крайней точки и по найденным значениям строим
график Nпс(SE6).Затем выделяем наибольшее значение мощности Nпс(max). Находим mN , учитывая размеры площади ограниченной осями системы координат:
mN= Nmax /Ynсmax (23)
mN=6330,8/190=33,32
Вт/мм
Находим затраченную мощность
Nзатр
= Nmax /h (24)
Nзатр
= 6330,8/0,75=8441,07 Вт
Вычисляем мощность электродвигателя
Nэл.дв
= Nзатр. ×1,1 (25)
Nэл.дв=8441,07×1,1=9285,17
Вт
2.2 Выбор электродвигателя
Выбираем электродвигатель по полученной мощности серии АИР марки 132М4.
Характеристики электродвигателя АИР 132М4:
мощность - 11 кВт, номинальная частота - 1447 об/мин, асинхронная частота
вращения - 1500 об/мин, ток статора - 22,2 А, КПД - 88,5 %, коэффициент
мощности - 0,85, масса - 83,5 кг, номинальное напряжение (0,55 - 11,0 кВт) -
220 В, 380 В, 660 В.
2.3 Выбор редуктора
Выбор редуктора производим по общему передаточному числу:
Up=nдв/n2 (26)
Up=1447/352=4,1
Так как Up=3..5, то проектируем одноступенчатый
зубчатый редуктор с внешним косозубым зацеплением.
Рассчитываем вращающийся момент на валу электродвигателя:
Тэл.дв. =9950×Nэл.дв /nдв
(27)
Тэл.дв. =9950×Nэл.дв / nдв=9950×11/1447=72,63 Н·мм
Рассчитываем вращающийся момент на быстроходном валу передачи:
Тб =Тэ.д.×hм (28)
Тб = 72,63×0,98=71,177 Н·мм
Рассчитываем вращающийся момент на тихоходном валу передачи:
Тэл.дв. =Тб× Up×hр (29)
Определяем КПД редуктора по формуле:
hр=1 - [m×(yз+yп)+n×(yпод)], (30)
где m=1 - число зубчатых пар;
n=2 -
число пар подшипников качения;
(yз+yп)=0.02 - сумма коэффициентов потерь
одной зубчатой парой;
(yпод)=
0.005 - коэффициент потерь на трение в одной паре подшип.
hр=1 - (1×0.02 + 2×0,005) = 0,97
Таким образом, вращающийся момент на тихоходном валу передачи
Тэл.дв. =71,177× 4,1×0,97=283,07 Н·мм
3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ЦИЛИНДРИЧЕСКОГО ЗУБЧАТОГО РЕДУКТОРА
3.1 Расчет зубчатых передач
Выбор твердости, термической обработки и материала колес.
Выбираем, марку стали - 45 (углеродистая, качественная,
машиностроительная сталь - ГОСТ 1050 - 88, нормальное содержание марганца до
0,8 %, процентное составление углерода 0,45 %).
На практике в основном применяют следующий вариант термической обработки.
Т.о. колеса - улучшение, твердость 235…262 НВ; т.о. шестерни - улучшение,
твердость 269…302 НВ. Зубья колес из улучшаемых сталей хорошо прирабатываются и
не подвержены хрупкому разрушению, но имеют ограниченную нагрузочную
способность. Применяют в слабо - и средненагруженных передачах.
В соответствии с таблице 2.1 /2, с.12/. принимаем; термообработка -
улучшение, твердость зубьев в сердцевине 235 - 262 НВ, на поверхности 235 - 262
НВ, σт =540 М·Па.
Определим прочность по контактным напряжениям с учетом механических
характеристик материала:
[σ]H=√(0,5([σ]2H1×[σ]2H2)) (31)
для шестерни:
[σ]H1=σH1lim×ZN1×ZR1×ZV1/SH1, (32)
где σH1limb - предел
контактной выносливости.
σH1limb=2HBср+70
(33)
σH1limb=2×285,5+70=641
М·Па
SH1
=1.1 - коэффициент безопасности для улучшенных сталей;
ZN1 -
коэффициент долговечности, в соответствии кривой усталости напряжение σH не могут иметь значения меньших σHlim. Поэтому при больших значениях NK чем NHG принимают NHG= NK;
ZN1=6√(NHG/ NK)=1 (34)
ZR1=1
- коэффициент, учитывающий влияние шероховатости сопряженных поверхностей
зубьев;
ZV1 -
коэффициент, учитывающий влияние окружной скорости u (ZV=1…1.15).
= 0,85×u0,1 ≥1 (35)
Вычислим окружную скорость u по формуле:
u=2аI n1 ×π/6×104×( Up +1) (36)
Предварительное межосевое расстояние определяем по формуле:
аI =К×(Up+1)×3√( Т / Up), (37)
где К - коэффициент в зависимости от поверхностной твердости Н1 и Н2
зубьев шестерни и колеса. Для Н1 и Н2 ≤350 НВ, К=10.
аI =10×(4,1+1)×3√( 283,07 / 4,1)=209,22 мм
Таким образом:
u=2аI n2 ×π/6×104×( Up +1)=9,78 м/с
По вычисленной окружной скорости назначаем степень точности зубчатой
передачи по таблице 2.5 /2, с. 18/.
Условие ZV= 0,85×u0,1 ≥1 выполняется ZV=1,059
Значит допускаемое контактное напряжение для шестерни:
[σ]H1=(641×1×1×1,059)/1,1=640 М·Па
для колеса:
[σ]H2=(σH2lim×ZN2×ZR2×ZV2)/SH2= 0,85×u0,1 ≥1
u=2аI n1 ×π/6×104×( Up +1)
аI =10×(4,1+1)×3√( 283,07 /
4,1)=209,22 мм
u=2аI n2 ×π/6×104×( Up +1)=9,78
Условие ZV= 0,85×u0,1 ≥1 выполняется ZV=1,059
[σ]H2=(567×1×1×1,059)/1,1=566 М·Па
[σ]H=√(0,5×(410881×321489))=605 М·Па
Тогда σHmin принимаем за меньшее значение [σ]H2, условие для цилиндрических передач
выполняется
≤707,5
Допускаемое напряжение при расчёте на выносливость.
для зубьев шестерни:
[σ]F1=(σF1lim×YN1×YR1×YA1)/ SF1, (38)
где σF1lim=1.75×HB=1.75×285,5= 499,625 М·Па - базовый предел
контактной выносливости;
SF1=1.7
(для улучшенных) - коэффициент запаса прочности;
YN1=1
- коэффициент долговечности, учитывающий влияние ресурса;
YR1=1,2
- коэффициент, учитывающий влияние шероховатости переходной поверхности между
зубьями;
YA1=1
- при одностороннем приложении нагрузки.
[σ]F1=499,625×1×1.2×1/1.7=352,676 М·Па
для зубьев колеса:
[σ]F2=434,875×1×1.2×1/1.7=306,97 (М·Па)
Расчет цилиндрических зубчатых передач.
Произведем уточнение межосевого расстояния по следующей формуле:
aw=Ka(U+1)×(K H ×T/yba×U×[σ] H 2), (39)
где Ka=410 (М·Па)1/3 - для косозубых колес;
yba - коэффициент ширины.
yba=0.2×(U+1)/(U - 1) (40)
yba=0.2×(4,1+1)/3,1=0.329
Коэффициент ширины принимаем из ряда стандартных чисел - 0,315
Коэффициент нагрузки в расчете на контактную прочность:
KH=KHn×KHb×KHa, (41)
где KHn=1,19 - коэффициент учитывающий
внутреннюю динамику нагружения связанную прежде всего с ошибками шагов
зацепления и погрешностями профилей зубьев шестерни и колеса.
Значение KHn
принимают по таблице 2.6 /2, с.19/. в зависимости от степени точности по нормам
плавности (nст=8), окружной скорости и твердости
рабочих поверхностей. Степень точности по ГОСТу 1643 - 81.
Коэффициент, учитывающий неравномерность распределения нагрузки по длине
контактных линий:
KHb=1+( KHb0 - 1) KHw, (42)
где KHw= 0.73 - коэффициент, учитывающий
приработку зубьев, его значение находят в зависимости от окружной скорости для
зубчатого колеса с меньшей твердостью в соответствии с таблицей 2.8 /2, с.21/.
ybd=0.5×ybа(U+1) (43)
ybd=0,8,
где KНb0=1.07 - коэффициент неравномерности
распределения нагрузки в начальный период работы. Значение KHb0 принимают в соответствии с таблицей
2.7 /2, с.20/ в зависимости от коэффициента ybd.
KНb=1+(1,07 - 1)×0.73=1,051
KНa - коэффициент распределения нагрузки
между зубьями определяют по формуле:
KНa=1+( KНa0 - 1) KНw (44)
Начальное значение коэффициента KНa0
распределения нагрузки между зубьями в связи с погрешностями изготовления
определяют в зависимости от степени точности по нормам плавности:
для косозубых передач
KНa0=1+А(nст - 5), при условии 1≤KНa0≤1,6, (45)
где А=0,25 при твердости колес Н1 и Н2 ≤350 НВ.
KНa0=1+0,25(8 - 5)=1,75
KНa=1+(1,75 - 1)×0,73=1,277
Рассчитываем окончательно коэффициент нагрузки в расчете на контактную
прочность:
KН=1,19×1,051×1,277=1,587
Окончательно уточняем межосевое расстояние aw подставив окончательные размеры:
aw=
2091×[707,958 / 750351,25]1/3=205,086 мм
Ближайшее значение межосевого расстояния по ГОСТу 2185 - 66
aw=200
мм в соответствии с таблицей /2, с. 21/.
Вычислим предварительные основные размеры колес:
d2=2× aw /(U+1)
(46)
b2= aw×yba (47)
Ширину колеса после вычисления округляют в ближайшую сторону до
стандартного в соответствии с таблицей 24.1 /2, с.452/. по ГОСТу 6636 - 69.
d2=2×200×4,1/5,1=321,568 мм
b2=
200×0.315=63 мм
Модуль передачи
Нормальный модуль зацепления принимаем по следующей рекомендации:
максимально допустимый модуль определяют из условия неподрезания зубьев у
основания:
mmax=2×aw/17×(U+1) (48)
mmax=400/17×5,1=6,32
мм
минимальное значение модуля определяют из условия прочности:
mmin=( Km×KF×T×(U+1))/( aw× b2×[σ]F), (49)
где Km=2,8×10³ для косозубых передач;
вместо [σ]F
подставляют меньшее из значений [σ]F1 и [σ]F2.
Коэффициент нагрузки при расчетах по напряжению изгиба:
KF= KFV×KFβ×KFα (50)
Коэффициент KFV учитывает
внутреннюю динамику нагружения, связанную прежде всего с ошибками шагов
зацепления шестерни и колеса. Значения KFV=1,38 принимают в соответствии с таблицей 2.9 /2,
с.22/.
KFβ - коэффициент, учитывающий
неравномерность распределения напряжений у основания зубьев по ширине зубчатого
венца, определяют по формуле:
KFβ=0,18+0,82× KHb0 (51)
KFβ=0,18+0,82×1,07=1,057
Коэффициент, учитывающий влияние погрешностей изготовления шестерни и
колеса на распределение нагрузки между зубьями, определяют также как и в
расчетах на контактную прочность:
KFa=KНa0=1,75 (52)
KF=
1.38×1.057×1.75=2.553
mmin=(
2,8×10³×2,5×283,07×(5,1))/(200×63×203)=2,73
Из полученного диапазона (mmin…mmin) модулем принимают меньшее значение m, согласуя его со стандартом: из ряда
1, по ГОСТу 9563 - 60 m=2,5
в соответствии с рядом /2, с.22/.
Определим минимальный угол наклона βmin по формуле:
βmin=arcsin(4×m/ b2) (53)
βmin=arcsin(4×2,5/63)=9,1º
Определим суммарное число зубьев колеса и шестерни:
zs=2×aw×cosβmin/m (54)
=2× 200×0,99/2,5=158
Действительное значение угла β:
βmin=arccos((zs×m)/(2×aw)) (55)
βmin=arccos((158×2,5)/(2×200))=9º
Число зубьев шестерни и колеса:
z2= zs - z1 (57)
z1=
158/5,1=31
z2=158
- 31=127
Определяем фактическое передаточное число:
Uф= z2 / z1 (58)
Фактическое значение передаточных чисел не должно отличатся от
номинального более чем на 3 %.
Uф=127/31=4,096
Проверочный расчет:
DU=((Uф - U)/Uф)×100 % (59)
DU=((2.72
- 2.67)/2.72)×100%=0,098 %< 3 %
погрешность вычисленного значения не превышает 3 %.
Диаметры колес
Определяем делительный диаметр шестерни:
d1= (z1×m)/cosβ (60)
d1=
(31×2,5)/cos9=78,4≈78 мм
Определяем делительный диаметр колеса:
d2=2× aw - d1
(61)
d2=2×200 - 78=322 мм
Диаметры da1 и df1 окружностей вершин и впадин зубьев
колес внешнего зецепления:
da1=d1+2×1×m (62)
df1=d1 - 2×1.25×m (63)=d2+2×1×m (64)=d2 - 2×1.25×m (65)
=78+2×1×2,5=83 мм=78 - 2×1.25×2,5=71,75 мм=322+2×1×2,5=327 мм=322 - 2×1.25×2,5=315,75 мм
Проверка зубьев колеса по контактным напряжениям.
Расчетное значение контактного напряжения:
σH=( zб / aw)×Ö(KH×T1×(Uф + 1)3)/b2×Uф, (66)
где zб=8400 для косозубых колес.
σH=42×13,134= 551 М·Па
Расчетное напряжение σH меньше допускаемого [σ]H в пределах 15 - 20 %, учитывая это, принятые параметры
передачи принимают за окончательные.
Определяем силы в зацеплении.
Окружная сила:
Ft=2000×T1/ d1 (67)
Ft=2000×283,07/78 =7258,229 Н
Радиальная сила:
Fr= (Ft×tg (a))/cosβ, (68)
где для стандартного угла a=200 tg (a)=0,364.
Fr=(7286,229×0,364)/0,99=2678,977 Н
Осевая сила
Fа=Ft×tgβ (69)
Fа=7286.229×0,142=1024,013 Н
Проверка зубьев колес по напряжениям изгиба.
Расчетное напряжение изгиба:
в зубьях колеса
σF2=(KF× Ft)/(b2×m)×YFS2×Yβ×Yε≤[σ]F2 (70)
Значение коэффициента YFS,
учитывающего форму зуба и концентрацию напряжений, в зависимости от приведенного
числа zυ=z/cos³β зубьев и коэффициента смещения для внешнего зацепления
принимаем YFS=3,59 в соответствии с таблицей 2.10
/1, с.25/.
Значение коэффициента Yβ, учитывающего угол наклона зуба в
косозубой передаче вычисляется по формуле:
Yβ=1 - β/100 (71)
Yβ=1 - 9/100=0,91 при условии Yβ≥0,7,
где Yε - коэффициент, учитывающий
перекрытие зубьев для косозубых передач Yε=0,65.
σF2=(2,6×7283,229)/(63×2,5)×3,59×0,91×0,65=255,309≤306,97 М·Па
условие выполняется;
в зубьях шестерни:
σF1=σF2×YFS1/YFS2≤[σ]F1 (72)
σF1=201,523×3,80/3,59=213,311≤352,676 М·Па
условие выполняется.
Проверочный расчет не прочность зубьев при действии пиковой нагрузки:
целью расчета является предотвращение остаточных деформаций или хрупкого
разрушения поверхностного слоя или самих зубьев при действии пикового момента
Тпик. Действие пиковых нагрузок оценивают коэффициентом перегрузки Тпер=Тпик/Т.
Коэффициент перегрузки характеризует режим нагружения; его принимаем в
соответствии с таблицей 24.9 /1, с.459/.
Для предотвращения остаточных деформаций или хрупкого разрушения
поверхностного слоя контактное напряжение σHmax не должно превышать допускаемого
напряжения [σ]Hmax;
σHmax=σН×√Кпер≤[σ]Hmax,
где допускаемое напряжение [σ]Hmax при улучшении равной 2,8×σТ, σТ принимают в соответствии с таблицей
2.1 /2, с.12/.
[σ]Hmax=2,8×540=1512 М·Па
σHmax=605×√2,2=897,36 М·Па
Для предотвращения остаточных деформаций и хрупкого разрушения зубьев
напряжение σFmax
изгиба при действии пикового момента не должно превышать допускаемое [σ]Fmax.
σFmax=σF×Кпер≤[σ]Fmax (73)
Проверку выполняют для зубьев шестерни и колеса в отдельности.
Допускаемое напряжение вычислят в зависимости от вида термической обработки и
возможной частоты приложения пиковой нагрузки:
[σ]Fmax=(σFlim×YNmax×kst)/Sst, (74)
где σFlim -
предел выносливости при изгибе;
YNmax
- максимальное возможное значение коэффициента долговечности, принимаем YNmax=4 - для улучшенных сталей;
kst -
коэффициент влияния частот приложения пиковой нагрузки, принимаем в случае
единичных перегрузок равным 1,3;
Sst -
коэффициент запаса прочности (обычно Sst=1,75).
Вычисляем предел выносливости при изгибе для зубьев шестерне:
[σ]F1max=(σF1lim×YN1max×kst1)/Sst1
σ]F1max=(499,625×4×1,3)/1,75=1484,6 М·Па
вычисляем предел выносливости при изгибе для зубьев колеса:
[σ]F2max=(σF2lim×YN2max×kst2)/Sst2
[σ]F2max=(434,875×4×1,3)/1,75=1292,2 М·Па
Таким образом, вычислим напряжение σFmax изгиба при действии пикового
момента;
для шестерни:
σFmax1=213,311×2,2=469,285≤1484,6 М·Па (75)
условие выполняется;
для колеса:
σFmax2=255,309×2,2=561,16798≤1292,2 М·Па
условие выполняется.
3.2 Проектный расчет валов
.2.1 Быстроходный вал
d≥8׳√T (76)
dП≥d+2×tкон (77)
dБП≥dп+3×r (78)
d≥8×4,144=33,154≈32 мм
Вычисленные значения диаметров округляют в ближайшую сторону до
стандартных в соответствии с таблицей 24.1 /2, с.452/. Высоту tкон заплечика, координату r фаски и размеры f мм фаски колеса принимают в
соответствии с таблицами 24.10 - 24.19 /2, с.459 - 467/.
dП≥32+2×2=36 мм
dБП≥36+3×2,5=44 мм
3.2.2 Тихоходный вал
d≥6׳√T
dП≥d+2×tкон
dБП≥dп+3×r
d≥6×6,566=39,396≈40 мм
dП≥32+2×2=36 мм
dБП≥36+3×2,5=44 мм
Диаметры концов быстроходного и тихоходного вала согласуют с диаметрами
валов в соответствии с таблицей 24.27 /2, с.475/.
Для вычерчивания эскизной компоновки предварительно можно принимать:
длину 1ст ступицы колеса - цилиндрического 1ст≥b2;
длину посадочного конца вала 1МБ=1МТ=1,5×d
для быстроходного вала:
МБ=1МТ=1,5×32=48 мм
для тихоходного вала:
МБ=1МТ=1,5×40=60 мм
длина промежуточного участка быстроходного вала:
КБ=1,4×dп (79)
КБ=1,4×47=65,8 мм
длина промежуточного участка тихоходного вала:
КТ=1,2×dп (80)
КТ=1,2×55=66 мм
Длина наружной резьбы конических концов валов принимают:
для быстроходного вала:
dp=0,9×[d - 0,1×1МБ] (81)
dp=0,9×[32 - 0,1×48]=28,368 мм
для тихоходного вала:
dp=0,9×[d - 0,1×1МТ] (81.1)
dp=0,9×[40 - 0,1×60]=30,6 мм
3.3 Конструирование зубчатых колес и вала
шестерни
.3.1 Установка колес на валу
Выполняем шестерню за одно целое с валом. Для подбора посадки примем
материал вала - сталь 45. Сборка осуществляется нагревом колеса (температурным
деформированием).
Колесо для тихоходного вала выбираем, где длина ступицы равна ширине
колеса. Ширину S торцов зубчатого
венца принимаем по формуле:
S=2,2×m+0,05×b2 (82)
S=5,5+3,15=8,65
мм
При годовом объеме выпуска более 100 штук применяют двусторонние штампы.
Толщина диска определяется по формуле:
С≈0,5×(S+Sст) (83)
Sст=0,5×(dст-d) (84)
Sст=0,5×(68,2-44)=12,1 мм
С≈0,5×(8,65+12,1)=10,375≈15 мм
3.3.2 Подбор посадки с натягом
Определяем контактное давление по формуле:
p=(2×К×Т)/(π×d²×1×f), (85)
где К - коэффициент запаса сцепления, его принимаем равным 3;
f -
коэффициент сцепления (трения), для прессования f=0,08.
p=(2000×3×283,07)/334111,2981=5,083 М·Па
Определяем деформацию деталей:
δ=(10³×p×d)/((C1/E1)+(C1/E1)), (86)
где C1 и C2 - коэффициенты жесткости.
Е1=Е2=2,1×105 (Н/мм2) - const, модули упругости.
C1=((1+(d1/d)²))/((1 - (d1/d)²)) - μ1 (87)
C2=((1+(d/d2)²))/((1 - (d/d2)²)) - μ2 ,
где диаметр d1 принимаем
равным нулю, т. к. вал сплошной;
d -
диаметр шестерни;
d2 -
диаметр колеса;
μ1=μ1=0,3 - коэффициенты Пуассона для
стали.
C1=1 -
0,3=0,7
C2=1,026/0,973
- 0,3=1,354
δ=(10³×5,083×52)/((0,7/2,1×105)+(1,354/2,1×105))=2,584 мк·м
Поправка на обмятие микронеровностей вычисляется по формуле:
U=5.5×(Ra1+Ra2), (88)
где Ra1 и Ra2 - средне арифметические отклонения профиля поверхности,
которое принимают в соответствии с таблицей 22.2 /1, с.387/.;
Ra1 -
отклонения профиля поверхности шпоночных пазов на валах 3,2;
Ra2 -
отклонения профиля поверхности шпоночных пазов в отверстиях колес - 1,6.=5.5×(3,2+1,6)=26,4
Минимальный натяг находим по формуле:
[N]min= δ+U (89)
[N]min= 2.584+26.4=28.984 мк·м
Максимальный натяг находим по формуле:
[N]max= [δ]max+U, (90)
где [δ]max - максимальная деформация, допускаемая прочностью деталей соединения.
[δ]max=([P]max×δ)/p, (91)
где [P]max - меньшее из двух определяемых значений по формулам.
[P]max=0,5×σт1×[1 - (d/d2)²]
[P]max=0,5×σт2×[1 - (d/d2)²],
где σт1 и σт2 - предел текучести по нормальным напряжениям.
σт1=σт2=540 М·Па
[P]max=0,5×540×1=262,959 мк·м
[P]max=0,5×540×0,974=270 мк·м
[δ]max=(262,959×2,584)/5,083=133,678 мк·м
[N]max= 133.678+26.4=160.078 мк·м
Выбор посадки принимаем в соответствии с таблицей 6.2 /2, с.86/. H7/U7.
Для выбранной посадки определяем силу запрессовки по формуле:
Fп=π×d×1×pmax×fn (93)=([N]max - U)×p/δ, (94)
где fn - коэффициент сцепления (трения) при
прессовке, для прессования сталь - сталь принимаем равным 0,20.
pmax=(160,78
- 26,4)×5,083/2,584=160,516 мк·м
Fп=3,14×52×49×160,516×0,2=257,342 к·Н
3.3.3 Расчет шпоночного соединения
- для тихоходного вала в месте соединения муфтой:
dсм=2×Т×10³/d×(h - t1)×lp (95)
dсм=(2×283,07/35,9×(8 - 5)×78)×1000=67,39 М·Па<140 М·Па
в месте посадки колеса:
dсм=(2×283,07/52,1×4×58)×1000=46,838
М·Па<140 М·Па
для быстроходного вала в месте соединения муфтой:
dсм=(2×71,177/29,1×3×50)×1000=32,6 М·Па<140 М·Па
3.4 Конструирование подшипниковых узлов и расчет
сил
.4.1 Определение реакции опор
.4.1.1 Быстроходный вал
Осуществляем выбор подшипников для дальнейшего расчета:
для быстроходного вала выберем подшипники роликовые конические
однорядные, повышенной грузоподъемности в соответствии с таблицей 24.16 /2,
с.465/. «Подшипник 7307А ГОСТ 27365 - 87»
Расчетные схемы для определения реакций опор быстроходного вала в
соответствии с рисунками 6, 7.
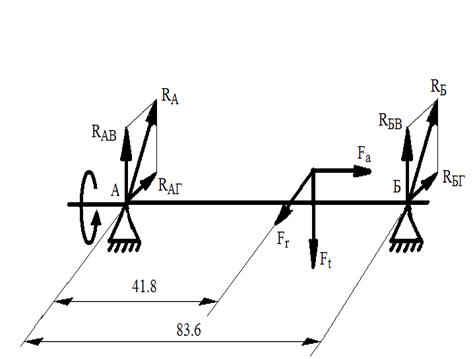
Рисунок 6 - Расчетная схема для определения реакции быстроходного вала
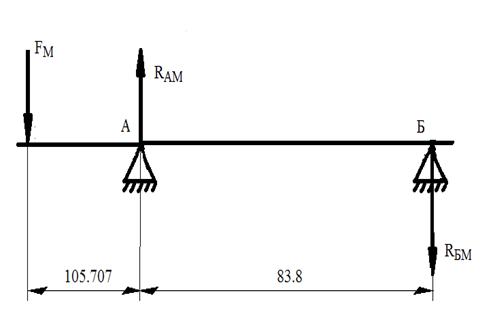
Рисунок 7 - Расчетная схема для определения реакции быстроходного вала
Быстроходный вал редуктора соединяется с валом электродвигателя муфтой
упругой втулочной - пальцевой (по ГОСТy 21424 - 75). Тогда:
Fm=50×( TБ)1/2 (96)
Fm=50×8,426=421,832 Н
Рассчитываем реакции от сил в зацеплении:
а) в плоскости YOZ
∑MА=0 (97)
Ft×11 - RБВ×12=0 (98)
RБВ=( Ft×11)/12 (99)
RБВ=(
7286,229×41,8)/83,6=3643,1145 Н
∑MБ=0 (100)
- Ft×(12 - 11)+ RАВ×12=0 (101)
RАВ=Ft×(12 - 11)/12 (102)
RАВ=7286,229×(41,8)/83,6=3643,1145 Н
Проверка:
∑Y=RАВ - Ft+RБВ (103)
∑Y=3643,1145 - 7286,229+3643,1145=0 -
реакции найдены правильно;
а) в плоскости XOZ
∑MА=0 (104)
Fr×11+(Fa×d1/2) - RБГ×12=0 (105)
RБГ=( Fr×11+(Fa×d1/2))/12 (106)
RБГ=(111981,2386+(1024,013×36/2))/83.6=1559,97 Н
∑MБ=0 (107)
(RАГ×12 - Fr×(12 - 11))+(Fa×d1/2)=0 (108)
RАГ=(Fк×(12 - 11) - (Fa×d1/2))/12 (109)
RАГ=2678,977×41,8 - 18432,234/83,6=1119,007 Н
Проверка:
∑X= - RАГ+Fr - RБГ (110)
∑X= - 1119,007+2678,977 - 1559,97=0 -
реакции найдены правильно;
Суммарные реакции опор:
RА=(R²АВ+ R²АГ) 1/2 (111)
RБ=(R²БВ+ R²БГ) 1/2 (112)
RА=3811,097
Н
RБ=3963,053
Н
Реакции от силы RМ:
∑MА=0 (113)
Fm×13+RБМ×12=0 (114)
RБМ=Fm×13/12, (115)
где 13 - расстояние от точки А до точки приложения силы Fm.
строгальный станок шпоночный редуктор
13=Т - а+1КБ+0,15d+12/2,
(116)
где а - смещение точки приложения радиальной реакции от торца
подшипника.
а=0,5×[Т+(d+D/3)×e], (117)
где D, T, e - размеры и
расчетные параметры выбранного подшипника (см. выбор подшипников).
а=0,5×[23+(36+80/3)×0,31]=17,493 мм
=23 - 17,493+65,8+5,4+29=105,707 мм
RБМ=105,707×421,832/83,6=533,381 Н
∑MБ=0 (118)
Fm×(12+13)+RАМ×12=0 (119)
RАМ=Fm×(12+13)/12 (120)
RАМ=421,832×(83,6+105,707)/83,6=955,213 Н
Проверка:
Fm+RAM - RБM=0 (121)
,832+955,213 - 533,381=0 - реакции найдены правильно;
Реакции опор для расчета подшипников:
RrA=RA+RAM (122)Б=RБ+RБM (123)
=3811,097+955,213=4766,31 Н
RrБ=3963,053+533,381=4496,4337
Н
3.4.1.2 Тихоходный вал
Расчетные схемы для определения реакций опор тихоходного вала в
соответствии с рисунками 8, 9.
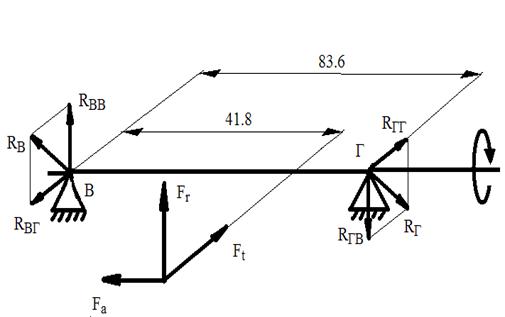
Рисунок 9 - Расчетная схема для определения реакции тихоходного вала
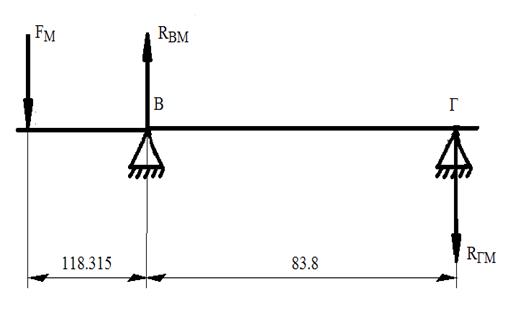
Рисунок 10 - Расчетная схема для определения реакции тихоходного вала
Тихоходный вал редуктора соединяется с исполнительным механизмом муфтой
упругой с торообразной оболочкой (по ГОСТy 21424 - 75). Тогда
Fm=50×( Tт)1/
Fm=50×16,825=841,234 Н
Рассчитываем реакции от сил в зацеплении:
а) в плоскости YOZ
∑MВ=0
Ft×11 - RГВ×14=0
RГВ=( Ft×11)/15
RГВ=(
7286,229×41,8)/83,6=3643,1145 Н
∑MГ=0
Ft×(15 - 14)+ RВВ×15=0
RВВ= -
Ft×(15 - 14)/15
RВВ= -
7286,229×(41,8)/83,6= - 3643,1145 Н
Проверка:
∑Y=RВВ+Ft - RГВ
∑Y= - 3643,1145+7286,229 - 3643,1145=0
- реакции найдены правильно;
а) в плоскости XOZ
∑MВ=0
Fr×14+(Fa×d2/2) - RГГ×15=0
RГГ=(
- Fr×11+(Fa×d2/2))/15
RБГ= -
111981,239/83.6= - 1066,337 Н
∑MГ=0
( - RВГ×15+Fr×(15 - 14))+(Fa×d2/2)=0
RВГ=(Fк×(12 - 11) - (Fa×d1/2))/12
RВГ=111981,239+22835,49/83,6=1612,64
Н
Проверка:
∑X=RВГ - Fr - RГГ
∑X=1612,64 - 2678,977 - 1066,337=0 -
реакции найдены правильно;
Суммарные реакции опор:
RВ=(R²ВВ+ R²ВГ) 1/2
RГ=(R²ГВ+ R²ГГ) 1/2
RВ=3984,079
Н
RГ=3795,966
Н
Реакции от силы RМ:
∑MВ=0
Fm×16+RГМ×15=0
RГМ=Fm×16/15
=Т - а+1КТ+0,15d+12/2
а=0,5×[Т+(d+D/3)×e]
а=0,5×[27,5+(44,6+100)/3×0,35]=22,185 мм
=27,5 - 22,185+66+6+41=118,315 мм
RГМ=841,234×118,315/83,6=1190,557 Н
∑MГ=0
Fm×(15+16)+RВМ×15=0
RВМ=Fm×(15+16)/15
RВМ=841,234×201,915/83,6=2031,791 Н
Проверка:
Fm+RВM - RГM=0
841,234+2031,791 - 1190,557=0 - реакции найдены правильно;
Реакции опор для расчета подшипников:
RrВ=RВ+RВM
RrГ=RГ+RГM
RrВ=6015,87
Н
RrГ=4986,523
Н
3.4.2 Расчет подшипников на заданный ресурс
- для быстроходного вала:
требуемая долговечность подшипников L′10ah=20000
ч.
Определяем осевые составляющие:
Rr1=RrА (124)
Rr2=RrБ (125)
Rr1=4766,31
Н
Rr2=4496,434
Н
RS1=0,83×e×Rr1 (126)=0,83×e×Rr2 (127)
1=0,83×0,31×4766,31=1226,372 Н
RS2=0,83×0,31×4496,434=1156,932 Н
т.к. RS1>RS2 и Fа>0
следовательно:
Rа1=RS1 (128)
Rа2=Rа1+Fа (129)
Rа1=1226,372
Н
Rа2=1226,372+1024,013
Н
Отношение:
Rа1/(V×Rr1) (130)
при коэффициенте вращения V=1
Rа1/(V×Rr2)=0,26<е=0,31
следовательно, принимаем для опоры 1: Х=1, Y=0.
Отношение:
Rа2/(V×Rr2)=0,5>е=0,31
Следовательно, принимаем для опоры 2: Х=0,4, Y=1,5.
Эквивалентные динамические нагрузки при коэффициенте безопасности
КБ=1,3 и температурном коэффициенте КТ=0,75 вычисляем по формуле:
RЕ1=V×X×Rr1×КБ×КT (131)
RЕ2=(V×X×Rr2+Y×Ra2)×КБ×КT (132)
RЕ1=1×1×4766,31×1,3×1=6196,203 Н
RЕ2=5174,150×1.3×1=6376,389 Н
Расчетная долговечность более нагруженного подшипника опоры 2 (опоры Б)
при а23=0,65 вычисляется по формуле:
L′10ah=а23×((Сr/RЕ2)3,33)×(106/(60×n)), (133)
где Сr - грузоподъемность подшипника;
n -
частота вращения вала;
а23 - коэффициент характеризующий совместное влияние на долговечность
особых свойств металла деталей подшипника и условий его эксплуатации.
L′10ah=0,65×((68200/6376,389)3,33)×(106/(60×1447))=20024,489 ч
Следовательно, ресурс подшипника оправдал свою долговечность
тихоходный вал
Определяем осевые составляющие:
Rr1=RrВ
Rr2=RrГ
Rr1=6015,87
Н
Rr2=4986,523
Н
RS1=0,83×e×Rr1=0,83×e×Rr2
1=0,83×0,35×6015,87=1747,661 Н
RS2=0,83×0,35×4986,523=1448,585 Н
т.к. RS1<RS2 и Fа>RS1 - RS2 следовательно:
Rа1=RS1
Rа2=Rа1+Fа
Rа1=1744,661
Н
Rа2=1744,661+1024,013=2774,674
Н
Отношение:
Rа1/(V×Rr1)
при коэффициенте вращения V=1
Rа1/(V×Rr2)=0,349<е=0,35
Следовательно, принимаем для опоры 1: Х=1, Y=0.
Отношение:
Rа2/(V×Rr2)=0,556>е=0,35
Следовательно, принимаем для опоры 2: Х=1, Y=1,6.
Эквивалентные динамические нагрузки при коэффициенте безопасности
КБ=1,4 и температурном коэффициенте КТ=0,75 вычисляем по формуле:
RЕ1=V×X×Rr1×КБ×КT
RЕ2=(V×X×Rr2+Y×Ra2)×КБ×КT
RЕ1=6015,87×1,4×1=8422,218 Н
RЕ2=2493,266+4434,678×1.4×1=9699,389 Н
Расчетная долговечность более нагруженного подшипника опоры 2 (опоры Б)
при а23=0,65 вычисляется по формуле:
L′10ah=а23×((Сr/RЕ2)3,33)×(106/(60×n))
L′10ah=0,65×((101000/9699,389)3,33)×(106/(60×352))=75292,348 ч
Следовательно, ресурс подшипника оправдал свою долговечность.
Выбор посадки колец подшипника.
Быстроходный вал редуктора устанавливается на подшипниках роликовых
конических. Внутреннее кольцо подшипника вращается вместе с валом
относительно действующей радиальной нагрузки и имеет следовательно,
циркуляционное нагружение. Отношение эквивалентной динамической нагрузки к
динамической грузоподъемности:
RЕ2/Сr=0,935
Учитывая значение полученного соотношения, принимаем в соответствии с
таблицей 7.6 /2, с.265/. поле допуска вала при установке подшипников n6, и в соответствии с таблицей 7.7
/2, с.265/ поле допуска отверстия К7.
На тихоходный вал редуктора установили конические роликовые подшипники.
Отношение эквивалентной динамической нагрузки к динамической грузоподъемности:
RЕ2/Сr=0,09
поле допуска вала при установке подшипников n6, поле допуска отверстия N7.
3.4.3 Построение эпюр моментов
Быстроходный вал.
Для построения эпюр определяем значения изгибающих моментов в характерных
сечения вала.
Вертикальная плоскость (YOZ) в
соответствии с рисунком 10.
сечение А:
Мx=0 (134)
сечение Е:
Мx=RAB×l1 (135)
Мx=152,282 Н·м
сечение Б:
Мx=0 (136)
Горизонтальная плоскость (XOZ) в
соответствии с рисунком 11.
сечение А:
Мy=0 (137)
сечение Е слева:
Мy=RAГ×l1
(138)
Мy=46,774 Н·м
сечение Е справа:
Мy=RAГ×l1+( Fa×d1)/2
(139)
Мy=65,3 Н·м
сечение Б:
Мy=0
(140)
Нагружение от муфты.
сечение Д:
ММ=0
(141)
сечение А:
ММ=RМ×l1
(142)
ММ=44,59 Н·м
сечение Б:
ММ=0
(143)
Передача вращающего момента происходит вдоль оси вала со стороны входного
участка до середины шестерни :
МК=Т (144)
МК=71,177 Н·м
в соответствии с рисунком 12.
Тихоходный вал.
Вертикальная плоскость (YOZ) в
соответствии с рисунком 13.
сечение В:
Мx=0
сечение Н:
Мx=RВB×l4
Мx=152,281 Н·м
сечение Г:
Мx=0
Горизонтальная плоскость (XOZ) в
соответствии с рисунком 14.
сечение В:
Мy=0
сечение Н слева:
Мy=RВГ×l4
Мy=46,774 Н·м
сечение Н справа:
Мy=RВГ×l4+( Fa×d2)/2
Мy=90,244 Н·м
сечение Г:
Мy=0
Нагружение от муфты:
сечение З:
ММ=0
сечение В:
ММ=RМ×l6
ММ=99,531 Н·м
сечение Г:
ММ=0
Передача вращающего момента происходит вдоль оси вала со стороны входного
участка до середины шестерни :
МК=Т
МК=283,07 Н·м
в соответствии с рисунком 15.
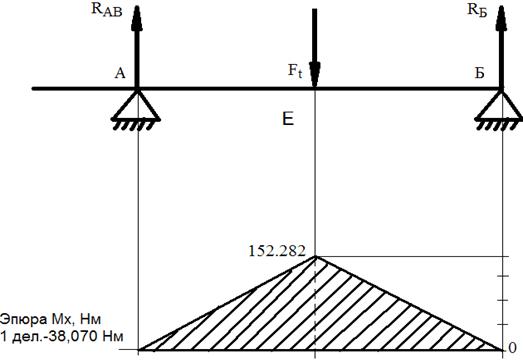
Рисунок 10 - Эпюра моментов Мх быстроходного вала
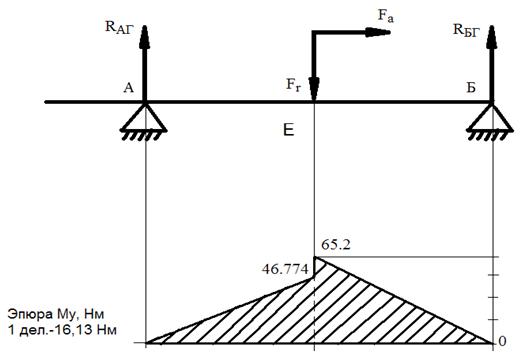
Рисунок 11 - Эпюра моментов Му быстроходного вала
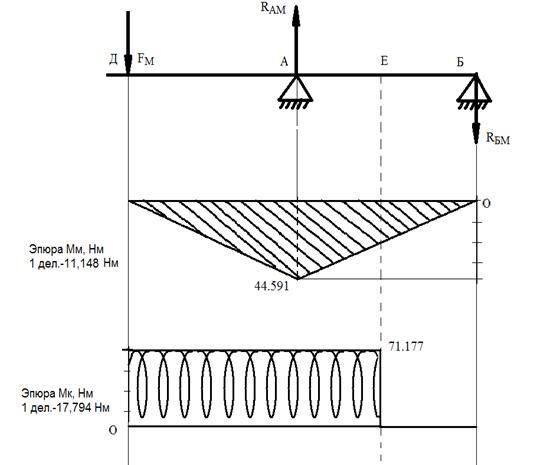
Рисунок 12 - Эпюра моментов ММ, МК быстроходного вала
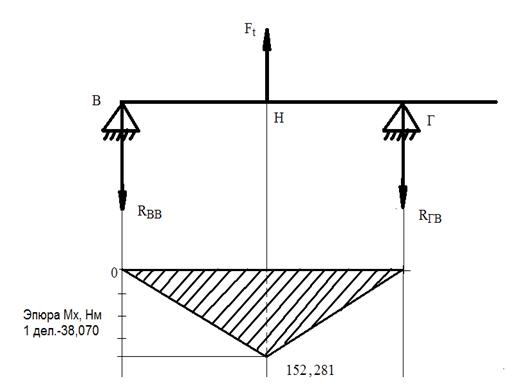
Рисунок 13 - Эпюра моментов Мх тихоходного вала
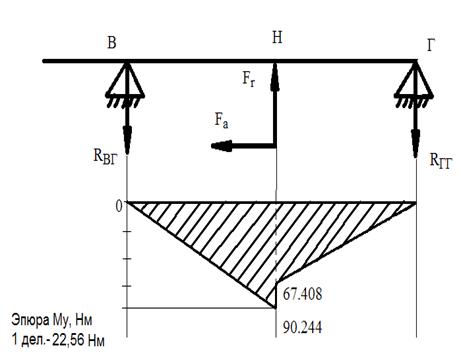
Рисунок 14 - Эпюра моментов Му тихоходного вала
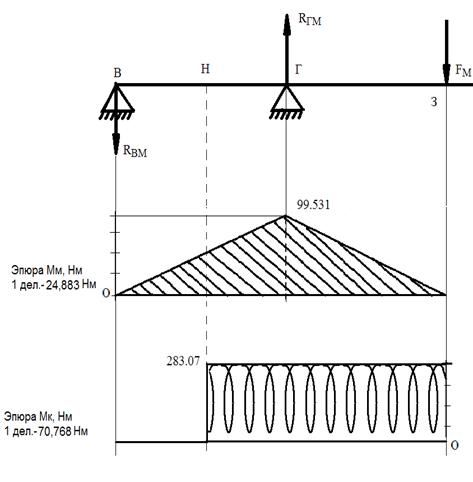
Рисунок 15 - Эпюра моментов ММ, МК тихоходного вала
Из эпюр моментов определили наиболее нагруженное сечение Н - место
установки колес.
Расчет сечения Н на статическую прочность:
М=√(Мх²×Му²)
(145)
М=177,013×10³
Нмм
Осевой момент сопротивления сечения определяется по формуле:
W=(π×d³)/32
(146)
W=13876,916
мм³
Эквивалентное напряжение :
σэкв=√(Мх²×Му²)/W
(147)
σэкв=13,688 Н/мм²
ST=σT/(Kп×σэкв) (148)
=640/27,914=23>[ST]=1,6
Расчет сечения Н на сопротивление усталости.
Определим амплитуду напряжения цикла в опасном сечении:
σа=σи=М/W
(149)
σа=σи=177013/13876,912=12,756 Н/мм²
τа=τк/2=МК/2WK
(150)
WK=π×d³/16
(151)
WK=27753,824
τа=(283,07×10³)/55507,649=5,1
Н/мм²
Коэффициенты концентрации напряжений в рассматриваемом сечении:
(Кσ)D=((Kσ/Kd+KF - 1)×1/KV) (152)
(Кτ)D=((Kr/Kd+KF - 1)×1/KV),
(153)
где KV=1 - коэффициент влияния
поверхностного упрочнения.
(Кσ)D=((2/0,81+1/0,95
- 1)×1/1)=2,52
(Кτ)D=((1,65/0,81+1/0,97
- 1)×1/1)=2,068
Пределы выносливости вала:
(σ - 1)D=(σ - 1/Kτ)D
(154)
(τ - 1)D=(τ - 1/Kτ)D
(155)
(σ - 1)D=(370/2,52)=146,825
Н/мм²
(τ - 1)D=(210/2,068)=101,55
Н/мм²
Коэффициенты запаса по нормальным и касательным напряжениям:
Sσ=(σ - 1)D/σa
(156)
Sτ=(τ - 1)D/τa (157)
Sσ=146,825/12,756
Sτ=101,55/5,1=19,912
Коэффициенты запаса прочности в сечении Н:
S=Sσ×Sτ/√(S²σ+S²τ) (158)
=229,187/√(132,48+396,488)=9,2>[S]=2,5
Сопротивление усталости в сечении Н обеспечивается.
3.4.4 Конструирование крышек подшипников
Крышки подшипника изготавливают из чугуна марок СЧ15. крышки подшипников
примем привертными: глухими и с отверстием для концов валов.
Поверхность крышек под головками крепежных болтов необходимо
обрабатывать.
Крышка на быстроходный вал
Толщина фланца при креплении крышки болтами:
σ1= σ×1,28, (159)
где σ - толщина стенки.
σ1=6×1,28=7,68 мм
Диаметр фланца крышки:
Dф=D+4×d, (160)
где D - диаметр внешнего кольца
подшипника;
d=9 -
диаметр винтов.
Dф=80+32=112
мм
Крышка на тихоходный вал
Толщина фланца при креплении крышки болтами:
σ1= σ×1,28
σ - толщина стенки
σ1=6×1,28=7,68 мм
Диаметр фланца крышки:
Dф=D+4×d
Dф=100+40
=140 мм
Так как, на быстроходном валу вращающийся момент не большой, крышку
подшипника крепим 4 болтами ГОСТ 7808 - 79 Болт М8×15. На конце вала в крышку встроено
манжетное уплотнение ГОСТ 8752 - 79, с полем допуска - d9. На тихоходном валу крышку подшипника крепим 6 болтами ГОСТ
7808 - 79 Болт М8×40.
3.4.5 Выбор уплотнительного устройства
Выбрали манжеты резиновые армированные по ГОСТу 8752 - 79.
3.5 Расчет деталей корпуса
Корпусные детали изготавливаем литьём из чугуна СЧ - 15. Корпус выполняем
разъёмным. Плоскость разъёмам проходит через оси валов. Отклонение от
поверхностей разъёма 0.05 мм .Проушины для подъема и транспортировки корпуса
отлиты заодно с корпусом с диаметром отверстий 20 мм. Заготовка корпуса после
черновой обработки основных сопрягаемых деталей подвергаются отжигу. Течь по
разъему предотвращается пастой «Герметик».
Расчет стенки корпуса редуктора:
δ=1,2×(TТ)1/4£ 6 (161)
δ=1,2×(283,07)1/4=8 мм
Диаметр болтов для соединения крышки с корпусом:
d=1.25×(T)1/3 (162)
d=1.25×(283,07)1/3≈10 мм
Число болтов крепления крышки с корпусом равно 10. Выбираем стандартные
болты согласно ГОСТу 7808 - 70 М10 × 40 . Под каждый болт устанавливаем
пружинные шайбы по ГОСТу 6402 - 70 d=12 мм.
Диаметр фундаментальных болтов:
dф=1.25×d (163)
dф=1.25×10=12 мм
Для улучшения надежности редуктора крепления к раме примем диаметр
фундаментальных болтов равных 12 мм.
Ширина фланца:
bфл=3×dф (164)
bфл=3×12=36 мм
Зазор между зубчатым колесом и стенкой корпуса редуктора:
a» (L)1/3+3 (165)
a»(343)1/3+3=10,3 мм
Расстояние от нижней части корпуса до колеса:
b0³3×a (166)
b0³3×10=30 мм
Толщина лап фундаментального болта:
σл=1.4×dф (167)
σл=1.0×12=12 мм
Число фундаментальных болтов при aw£ 250 , Zф= 4
3.6 Смазка
Для смазки подшипников и зубчатых колес используем картерную систему
смазки . Требуемую вязкость масла определяем в зависимости от контактного
напряжения и окружной скорости колес [σ]H=605 М·Па, u=9 м/с. Выбираем сорт масла в
зависимости от вязкости - Индустриальное легко нагруженное без присадок И - Л -
А - 22.
Подшипники смазываются тем же маслом что и детали передач. Для замены
масла в нижней части корпуса предусмотрено сливное отверстие. М16×1.5.для обеспечения полного слива масла
выполняется небольшое углубление непосредственно около сливного отверстия в дне
корпуса. Сливное отверстие закрывается цилиндрической пробкой с резьбой. Для
залива масла используются крышка с отдушиной М 12×1.75.
Уровень масла контролируется жезловым маслоуказателем. Он вкручивается в
отверстие, в корпусе.
Уровень погружения колеса определяем по формуле:
hm≈(2×m…0,25×d2T)
(168)
hm≈40
мм
3.7 Выбор муфт
Для соединения выходных
концов двигателя и быстроходного вала редуктора подбираем муфту
втулочно-пальцевую (по ГОСТу 21424 - 75) с= 140мм,= 81 мм= 121 мм
Полумуфты изготавливают из
чугуна марки СЧ 20 (ГОСТ 412 - 85);
материал пальцев - сталь 45
(ГОСТ 1050 - 74); материал упругих втулок - резина с пределом прочности при
разрыве не менее 8 Н/ .
.
Для соединения выходных
концов тихоходного вала редуктора и приводного вала рабочей машины подбираем
муфту с торообразной оболочкой сталь Ст 3 (ГОСТ 380 - 71); материал упругой
оболочки - резина с пределом прочности при разрыве не менее 10 Н/.
ЗАКЛЮЧЕНИЕ
В ходе выполнения курсового
проекта закреплены знания студентов, полученные при изучении общетехнических
дисциплин: теоретической механике, высшей математики; развиты конструкторские
навыки, расширены теоретические знания по конструированию типовых узлов и
деталей.
Студенты подробно
ознакомились с действующими стандартами, нормами, справочной литературой.
Данный курсовой проект внес вклад в знания студентов которые, которые
потребуются при выполнении последующих проектов и, в конечном счете, дипломного
проекта.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1 Бейзельман
Р.Д. Подшипники качения. / Р.Д. Бейзельман, Б.В. Цыпкин, Л.Я. Перель. - М.:
Машиностроение, 1975.- 572 с.
Дунаев П.Ф.
Конструирование узлов и деталей машин / П.Ф. Дунаев О.П.Леликов. - М.: Высшая
школа, 2001. - 447 с.
Ермаков Ю.М.
Металлорежущие станки / Ю. М. Ермаков, Б.А. Фролов. - М.: Машиностроение, 1985.
- 320 с.
Металлорежущие
станки: Учеб. пособие / В.К. Тепинкичиев, Л.В. Красниченко, А.А. Тихонов, Н.С.
Колев. - М., Изд-во Машиностроение, 1972. - 464 с.
Ряховский
О.А. Справочник по муфтам / О.А. Ряховский, С.С. Иванов. Л.: Политехника,
1991.- 384 с.
ПРИЛОЖЕНИЕ А
Пример построения плана положений
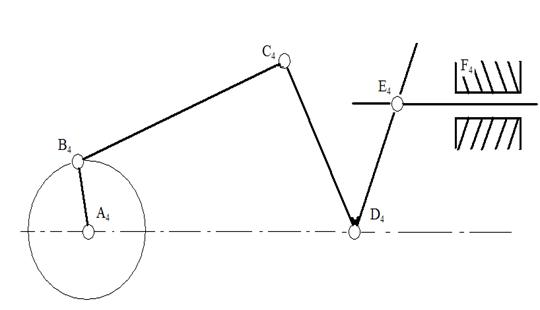
Рисунок 16 - Положение механизма в точке 4
ПРИЛОЖЕНИЕ Б
Пример построения плана скоростей
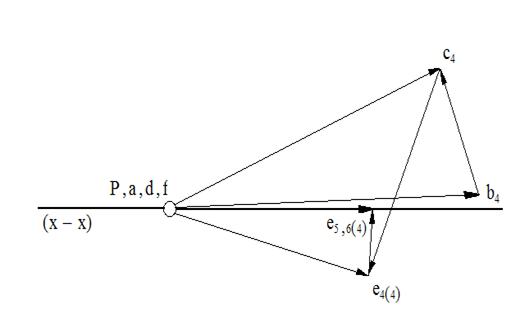
Рисунок 17 - План скоростей в точке 4
ПРИЛОЖЕНИЕ Г
Пример построения плана ускорений
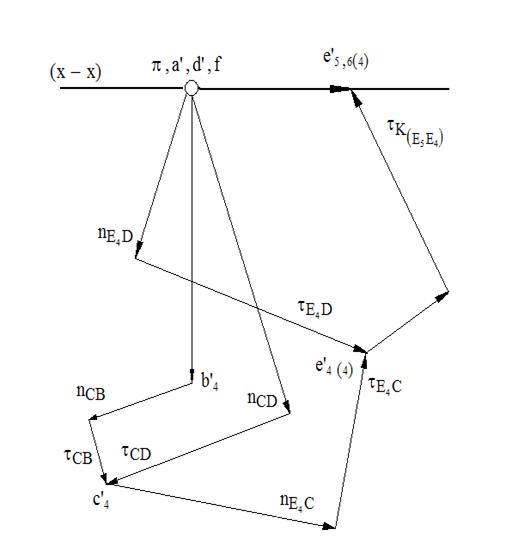
Рисунок 18 - План ускорений в точке 4
ПРИЛОЖЕНИЕ Г
Таблица для определения мощностей рабочего хода
Таблица 1 - Параметры механизма рабочего хода
|
i
|
    
|
|
|
|
|
|
0
|
190
|
3800
|
0
|
0
|
0
|
|
1
|
190
|
3800
|
47,5
|
0,874
|
3321,2
|
|
2
|
190
|
3800
|
77
|
1,417
|
5384,6
|
|
3
|
190
|
3800
|
90,5
|
1,666
|
6330,8
|
|
4
|
153
|
3060
|
84,5
|
1,555
|
4758,3
|
|
5
|
44
|
880
|
50
|
0,92
|
809,6
|
|
6
|
0
|
0
|
0
|
0
|
0
|
ПРИЛОЖЕНИЕ Д
Построение диаграммы мощностей
μl=0,001 м/мм, μN=0,0184 B/мм
μl=0,0184 м/с·мм, Nmax=6330,8 Bт