Разработка системы управления легкового автомобиля класса E габаритной длинной 4.8 метра
Оглавление
Введение
. Назначение
и условия эксплуатации автомобиля
.
Проектирование тормозной системы
.1 Разработка
технических требований к тормозной системе
.2 Основные
параметры и функциональные характеристики тормозной системы
.2.1
Определение параметров тормозной системы механизмов рабочей тормозной системы
.2.2
Определение параметров тормозных механизмов стояночной тормозной системы
.3 Разработка
принципиальной схемы тормозной системы
.4
Определение параметров тормозных механизмов
.5
Определение параметров тормозного привода
.
Проектирование рулевого управления
.1 Разработка
технических требований к рулевому управлению
.2 Основные
параметры и функциональные характеристики рулевого управления
Заключение
Список
использованных источников
Введение
Современные темпы развития автомобилей идут по пути улучшения их
конструкции, что позволяет проектировать автомобили со значительным увеличением
скорости движения, а это как следствие приводит к увеличению нагрузки на их
системы управления. Все это вызывает необходимость применения на этих
автомобилях тормозных и рулевых механизмов способных воспринимать данные
нагрузки.
Тормозная система - это совокупность устройств, предназначенных для
снижения скорости движения автомобиля до полной его остановки, если это необходимо
и удержания его в неподвижном состоянии во время стоянки. Современные
автомобили должны обязательно иметь: рабочую, запасную, стояночную, а грузовые
автомобили с полной массой более 12 тонн и вспомогательную тормозную систему.
Рулевое управление - это совокупность устройств, обеспечивающих поворот
управляемых колес автомобиля при воздействии водителя на рулевое колесо.
Рулевое управление состоит из рулевого привода, рулевого механизма и усилителя.
Процесс проектирования любого технического объекта содержит три этапа:
а) функциональное проектирование,
б) конструкторское проектирование,
в) конструирование.
В данной курсовой работе необходимо осуществить функциональное
проектирование системы управления легкового автомобиля габаритной длинной 3 м.
Функциональное проектирование заключается в определении структуры и параметров
технического объекта, характеризующих выполнение объектом своего
функционального назначения. Целью функционального проектирования является
достижение высокого технического уровня создаваемого автомобиля. Операции и
процедуры функционального проектирования, как правило, почти полностью
поддаются формализации, что в конечном итоге создает благоприятные условия для
определения и выбора оптимальных параметров и структуры технического объекта.
При этом могут использоваться математические модели создаваемых объектов,
модели оценки и принятия решений, которые в виде соответствующих алгоритмов
реализуются при проектировании.
1. Назначение и условия эксплуатации автомобиля
Проектируемый автомобиль - легковой автомобиль класса E габаритной длинной 4.8 метра.
При эксплуатации автомобиля учитываются дорожные, транспортные и
климатические условия.
Данный автомобиль предназначен для эксплуатации в условиях дорог общего
пользования, как с усовершенствованным покрытием, так и без такового.
Характеристики дорожного покрытия представлены в таблице 1.1. Эксплуатация
осуществляется в зоне умеренного климата с рабочим диапазоном температур
-30…+30.
Таблице 1.1- Характеристики дорожного покрытия
|
Покрытие
|
Параметры дорожного
покрытия
|
|
j
|
f
|
|
асфальтобетон
|
0,45-0,8
|
0,013-0,02
|
|
грунт
|
0,2-0,6
|
0,025-0,15
|
Климатические условия характеризуются температурой воздуха и ее сезонными
и суточными изменениями, влажностью и скоростью ветра. По этим факторам
различают зоны умеренного, холодного и жаркого климата. Республику Беларусь
относят к зоне умеренного климата, в которую входят центральные районы стран
СНГ, где минимальная температура зимой -20 -30°С, а максимальная температура летом до +30°С. От климатических условий зависит
состояние покрытия дорог, которое бывает влажное, заснеженное, обледенелое, и
видимость (в дождь, снегопад, туман). Температура окружающего воздуха влияет на
тепловой режим работы двигателя и условия работы механизмов автомобиля. При
стандартной температуре окружающего воздуха +20°С системы двигателя обеспечивают нормальный тепловой
режим его работы, что соответствует температуре охлаждающей жидкости и масла
80-100°С. Отклонение температуры окружающего
воздуха от стандартной вызывает нарушение теплового режима двигателя и
ухудшение показателей тягово-скоростных свойств и топливной экономичности.
Дорожные условия определяются типом и состоянием дорожного покрытия и
дорожных сооружений, рельефом местности и интенсивностью движения. От дорожных
условий зависит максимальная нагрузка на мост автомобиля, средняя скорость
движения и другие эксплуатационные характеристики.
2. Проектирование тормозной системы
.1 Разработка технических требований к тормозной системе
Тормозные свойства определяют активную безопасность автомобиля и поэтому
регламентируются международными документами, разработанными Комитетом по
внутреннему транспорту Европейской экономической комиссии Организации
Объединенных Наций (ЕЭК ООН) - Правила №13, в соответствии с которыми разрабатываются
национальные стандарты.
В соответствии с Правилами ЕЭК ООН №13 все автотранспортные средства
должны быть оборудованы тормозными системами, предназначенными для
осуществления рабочего, стояночного и аварийного торможения. Эти функции
выполняют соответственно рабочая, стояночная и запасная тормозные системы.
Тормозные
механизмы рабочей тормозной системы при номинальном давлении в их приводе
должны развивать достаточные моменты для полной реализации сцепных возможностей
колес с дорогой. Так как при торможении происходит перераспределение нормальных
реакций дороги на колеса, причем, нагрузка на колеса переднего моста
возрастает, а на колеса заднего уменьшается, то в основу выбора параметров
тормозных механизмов кладут определение максимального момента тормозных
механизмов по условиям сцепления передних колес на дороге с максимальным
коэффициентом сцепления  :
:
 (1)
(1)
Принимают
 без усилителя и
без усилителя и  при
наличии усилителя. Стояночные тормоза должны надежно удерживать автомобиль в
неподвижном состоянии на уклоне
при
наличии усилителя. Стояночные тормоза должны надежно удерживать автомобиль в
неподвижном состоянии на уклоне  .
Значение регламентировано и зависит от типа автомобиля. Для
пассажирских автомобилей
.
Значение регламентировано и зависит от типа автомобиля. Для
пассажирских автомобилей  = 0,25
= 0,25
В
общем случае суммарный момент тормозных механизмов стояночной тормозной системы
должен соответствовать неравенству
 (2)
(2)
где
 ,
,  -
передаточное число и КПД участка трансмиссии от стояночного тормоза до колес.
-
передаточное число и КПД участка трансмиссии от стояночного тормоза до колес.
Запасная тормозная система используется при отказе рабочей тормозной
системы. Обычно ее роль выполняют оставшийся исправным тормозной привод и
тормозные механизмы двухконтурной рабочей тормозной системы.
Нормативы эффективности рабочей тормозной системы представлены в таблице
1.1.
Таблица 1.1 Нормативы эффективности рабочей тормозной системы
|
Начальная скорость, м/ч
|
Усилие на педали ,Н
|
Тормозной путь,
(замедление, м/с2) при испытаниях
|
|
|
Типа «ноль»
|
Типа I
|
|
80
|
500
|
43,2(7,0)
|
52,1(5,6)
|
Нормативы эффективности запасной тормозной системы представлены в таблице
1.2.
Таблица 1.2 Нормативы эффективности рабочей тормозной системы
|
Начальная скорость, м / с
|
Усилие на органе
управления,Н
|
Тормозной путь, м, не более
|
Установившееся
замедление,м/с2, не менее
|
|
ручном
|
ножном
|
|
|
|
80
|
400
|
93,3
|
2,9
|
|
|
|
|
|
|
К тормозным приводам автомобилей предъявляют следующие требования:
обеспечение приводом следящего действия, т. е. на режимах торможения и
оттормаживания тормозные моменты, развиваемые тормозными механизмами, должны
быть пропорциональны усилию, приложенному водителем к тормозной педали, и
перемещению ее;
время срабатывания тормозного привода при торможении не должно превышать
0,6 с, а при оттормаживании - 1,2 с;
привод рабочей тормозной системы должен иметь не менее двух независимых
контуров, чтобы в случае повреждения какой-либо части привода сохранялось
эффективность торможения не менее 50 % ;
Проектируемый автомобиль имеет гидравлический привод. Гидравлический
привод отличается высоким быстродействием, простотой конструкции, малыми
габаритными размерами, небольшой массой и стоимостью. Однако он имеет
ограниченное силовое передаточное число, что ограничивает область его
применения.
При выходе из строя одного из контуров должна сохранятся заданная
эффективность тормозов автомобилей. Наш проектируемый автомобиль имеет
диагональную схему, которая позволяет сохранить эффективность торможения (не
менее 50 %) при выходе из строя любого контура. Однако при применении этой
схемы, тормозные силы несимметричны, и передние колеса при этом стремятся
повернуться относительно шкворней в сторону большей силы, что приводит к потере
устойчивости автомобиля. Поэтому на автомобилях с таким приводом обычно
применяют отрицательные плечи обкатки (до 20 мм), что улучшает устойчивость.
Тормозные механизмы должны обладать большим запасом прочности.
Дисковые тормозные механизмы имеют большую энергоёмкость, то есть
способны за один и тот же промежуток времени перевести больше кинетической
энергии в тепловую. Но они хуже защищены от грязи и пыли в сравнении с
барабанными.
Повышение устойчивости движения автомобиля при торможении будем
обеспечивать с помощью РТМ.
Таблица 1.2 - Требования к тормозной системе
|
Название требования
|
Значение
|
|
Усилие на педали, Н
|
<500
|
|
Удельная работа трения,
Нм/см2
|
<1300
|
|
Приращение температуры за
одно торможение, 0С
|
<100
|
|
Удельное давление на
накладку, Н/см2
|
<19
|
|
Ход педали, м
|
<0,15
|
|
Количество контуров привода
|
2
|
2.2 Основные параметры и функциональные характеристики
тормозной системы
.2.1 Определение параметров тормозной системы механизмов
рабочей тормозной системы
Результирующими параметрами тормозных механизмов являются тормозные
моменты. Тормозные механизмы рабочей тормозной системы при номинальном давлении
в их приводе должны развивать достаточные моменты для полной реализации сцепных
возможностей колес с дорогой. Параметры тормозных механизмов выбирают на основе
определения максимального момента тормозных механизмов по условиям сцепления
передних колес на дороге с максимальным коэффициентом сцепления jmax:

 Н×м; (2.1)
Н×м; (2.1)
где jmax=0,8 - максимальный коэффициент
сцепления колес с дорогой при наличии усилителя.
Используя выражение 4.1 мы нашли суммарный момент тормозных механизмов
переднего моста при давлении в приводе рmax. Для определения суммарного момента
тормозных механизмов заднего моста воспользуемся коэффициентом распределения
тормозных моментов:
 Н×м, (2.2)
Н×м, (2.2)
где bТ - коэффициент распределения тормозных
моментов, вычисляется по формуле приведенной ниже:
 (2.3)
(2.3)
где
j0=0,8.  Нм.
Нм.
Определим
коэффициенты пропорциональности между моментами  ,
,  и давлением в приводе pmax.
и давлением в приводе pmax.
 , (2.4)
, (2.4)
 . (2.5)
. (2.5)
Коэффициенты
 и
и  характеризуют
преобразующие свойства привода тормозных механизмов и позволяют определить
конструктивные параметры его элементов.
характеризуют
преобразующие свойства привода тормозных механизмов и позволяют определить
конструктивные параметры его элементов.
2.2.2 Определение параметров тормозных механизмов стояночной
тормозной системы
Стояночные тормоза должны надежно удерживать автомобиль в неподвижном
состоянии на уклоне hmax.
Для рассматриваемого автомобиля значение hmax регламентировано и принимается
равным 0.25
Суммарный момент тормозных механизмов стояночной тормозной системы
определяется из неравенства:
 Н∙м. (2.6)
Н∙м. (2.6)
 и
и  из формулы 2.7 можно исключить т.к. в качестве
стояночных тормозов используются тормозные механизмы рабочей тормозной системы.
из формулы 2.7 можно исключить т.к. в качестве
стояночных тормозов используются тормозные механизмы рабочей тормозной системы.
.3 Разработка принципиальной схемы тормозной системы
На основании обзора и анализа существующих конструкций и требований,
предъявляемых к системе управления, осуществим структурный синтез тормозной
системы.
По виду используемой энергии привод тормозных механизмов будет
гидравлическим.
Достоинства гидравлического привода:
). Малое время срабатывания в сравнении с пневматическим.
). Высокий КПД до 95%.
). Удобство компоновки в отличии от механического.
). Равенство тормозных сил на тормозных механизмах левых и правых колес.
). Возможность распределения приводных сил передних и задних колес за счет
применения цилиндров разного диаметра.
Недостатки:
). Высокие требования к герметичности.
). Пожароопастность.
). Зависимость характеристик привода от температуры окружающей среды.
В качестве тормозной системы были выбраны:
а) тормозные механизмы - на передний мост дисковые с плавающей скобой, на
задний дисковые;
б) стояночная тормозная система приводится в действие от ручного рычага;
в) схема тормозного привода - двухконтурная, с разделением по осям;
г) тип привода - гидравлический;
д) регулятор тормозных моментов - лучевой.
Принципиальная схема тормозной системы представлена на рисунке 2.3.
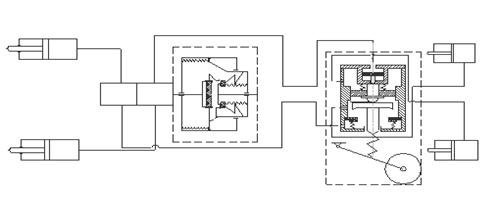
Рисунок 2.3 - Принципиальная схема тормозной системы
2.4 Определение параметров тормозных механизмов
автомобиль
силовой тормозной рулевой
Определим конструктивные параметры исполнительных элементов тормозной
системы. Исполнительными элементами тормозной системы проектируемого автомобиля
являются дисковые тормозные механизмы. Для тормозных механизмов необходимо
определить следующие параметры: эквивалентный радиус трения; высоту накладки;
угол сектора накладки; толщину тормозного диска.
Рассмотрим передний тормозной механизм.
 -
требуемый тормозной момент (=1839
Н*м);
-
требуемый тормозной момент (=1839
Н*м);
 -
наружный радиус диска (=240·10-3 м );
-
наружный радиус диска (=240·10-3 м );
 -
внутренний радиус диска (=150·10-3 м );
-
внутренний радиус диска (=150·10-3 м );
 -
коэффициент трения, (=0,35).
-
коэффициент трения, (=0,35).
Определим
эквивалентный радиус трения:
 м. (2.7)
м. (2.7)
Определим
требуемое усилие прижатия накладок:
 Н. (2.8)
Н. (2.8)
Используя полученный результат можно определить диаметр исполнительных
гидроцилиндров:
 м. (2.9)
м. (2.9)
где
 - давление в приводе (
- давление в приводе ( МПа).
Основные конструктивные параметры определим исходя из удовлетворения требований
к показателям энергоемкости тормозных механизмов и удельному давлению на накладку.
МПа).
Основные конструктивные параметры определим исходя из удовлетворения требований
к показателям энергоемкости тормозных механизмов и удельному давлению на накладку.
Площадь
накладок определим как:
 (2.10)
(2.10)
где a - угол сектора
накладки, град.
Удельная работа трения вычисляется по формуле:
где [Aуд]=1300Дж/см2 - допустимая
удельная работа трения
Приращение температуры диска за одно торможение можно определить по
формуле:
 (2.11)
(2.11)
где m - масса всех тормозных дисков, кг; C - теплоемкость материала диска,
примем 535 Дж/кг0С.
Удельное давление на накладку определим по зависимости:
 (2.12)
(2.12)
Параметры дисковых тормозных механизмов определённые по вышеизложенной
методике приведены в таблице 2.1.
Таблица 2.1- Результаты определения конструктивных параметров тормозной
системы
|
Название параметра
|
Обозначение
|
Передние
|
Задние
|
|
Усилие прижатия накладки, Н
|
F
|
13475
|
7285
|
|
Угол сектора накладки, град
|
aн
|
40
|
35
|
|
Наружный диаметр накладки,
м
|
dн
|
0,48
|
0,4
|
|
Внутренний диаметр
накладки, м
|
dв
|
0,3
|
0,3
|
|
Диаметр тормозного
цилиндра, м
|
dk
|
0,046
|
0,034
|
Таблица 2.2 - Показатели нагруженности тормозных механизмов
|
вычисленные значения
|
вычисленные значения
|
Степень выполнения
требования, %
|
|
Удельная работа, Н*м/см2
|
1233
|
1300
|
5
|
|
Приращение температуры, 0С
|
51
|
100
|
49
|
|
Удельное давление, Н/см2
|
4,9
|
19
|
74
|
2.5 Определение
параметров тормозного привода
Определим параметры главного тормозного цилиндра, вакуумного усилителя
тормозного привода и регулятора тормозных усилий.
Диаметры колесных тормозных цилиндров находятся по формуле:
 (2.13)
(2.13)
где  - максимальное давление в тормозном приводе.
- максимальное давление в тормозном приводе.
Задавшись передаточным числом педального привода  находим площадь главного тормозного
цилиндра Аг:
находим площадь главного тормозного
цилиндра Аг:
 , (2.14)
, (2.14)
где kу =3,5- коэффициент усиления усилителя;
Fп=325 Н - усилие на педали тормоза;
откуда:
 .
.
Для данного автомобиля выбираем усилитель тормозов гидровакуумного типа.
Далее приведена методика определения основных параметров и построения статической
характеристики гидровакуумного усилителя тормозного привода.
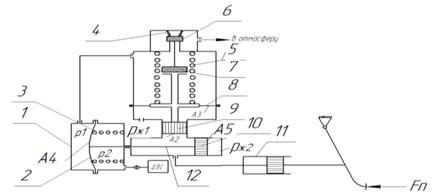
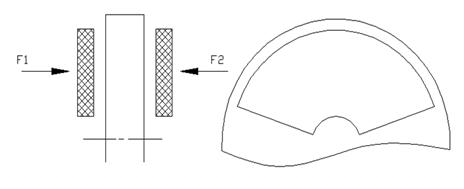
Рисунок 2.5 - расчетная схема гировакуумного усилителя тормозов
1- исполнительное устройство;
- мембрана;
, 4, 5- пружины;
- атмосферный клапан;
- вакуумный клапан;
- резиновая мембрана;
- поршень следящего устройства;
- поршень гидроцилиндра;
- ГТЦ;
-шток;
- следящее устройство.
Из конструкторских соображений задаемся значениями:
площадь поршня гидроцилиндра A5=4.7e-4 м2;
сила пружины 3 Fпр3=30Н;
сила пружины 5 Fпр5=70Н.
Далее находится активная площадь A4 мембраны 2 из формулы:
 (2.15)
(2.15)
где  - приращение давлений p1 и p2.
- приращение давлений p1 и p2.
Площади поршня следящего устройства 9 А2 и резиновой мембраны
2 A3 выбираются т. о., чтобы обеспечивать необходимый
коэффициент усиления kу.
В режиме без усилителя статическая характеристика строится по формуле
(линия а рисунок 2.6):
 . (2.16)
. (2.16)
В режиме следящего действия (линия б рисунок 2.7):
 . (2.17)
. (2.17)
В режиме постоянного усиления (линия б рисунок 2.7):
 . (2.18)
. (2.18)
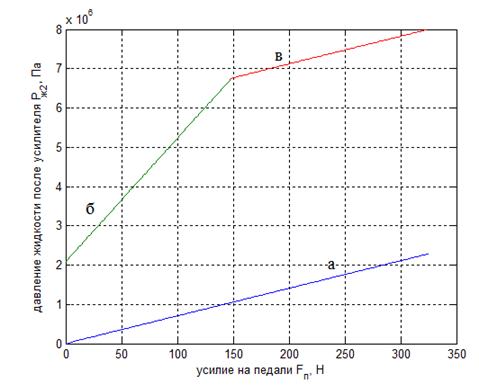
Рисунок 2.7 - Статическая характеристика усилителя тормозов
РТМ, применяемый в данном автомобиле, выполнен в виде дифференциального
клапана.
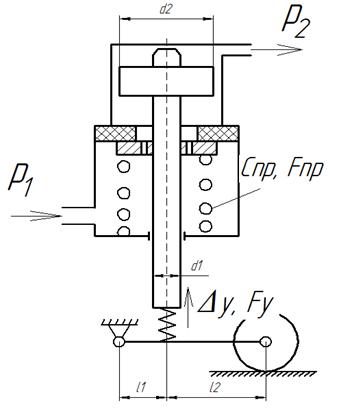
Рисунок 2.8 - Расчетная схема дифференциального клапана
Определению подлежат следующие параметры:
) диаметр штока d1 и диаметр поршня d2;
) усилие пружины поршня Fпр;
) передаточное число привода РТМ  ;
;
) усилие упругого элемента РТМ Fу;
) жесткость упругого элемента РТМ су.
Строится характеристика оптимального соотношения давлений в контурах
тормозного привода и апроксимируется отрезками Обв и Оаг(рисунок 2.9). Из
рисунка 2.9 находятся давления в контурах включения РТМ в работу(координаты
точек а и б) и угол α.
Для построения графика зависимости деформации упругого элемента задней
подвески при аварийном торможении от давления р1 в переднем контуре(рисунок
2.10), воспользуемся формулой:
 (2.19)
(2.19)
где Ga - вес авто;
q2=1864Н
- вес неподрессоренной массы;
a -
расстояние от ЦМ до переднего моста автомобиля;
hc
-высота ЦМ;
L=2,85м
- база авто;
 -суммарная жесткость задней подвески;
-суммарная жесткость задней подвески;
k1, k2 - коэффициент пропорциональности
между давлением в тормозном приводе и моментом трения тормозного механизма
переднего и заднего соответственно.
Формула (3.19) вычисляется отдельно для полной массы и снаряженной массы.
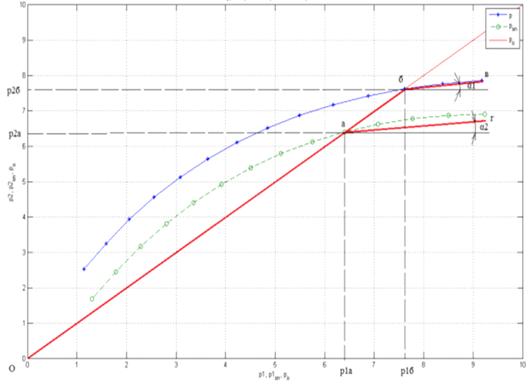
Рисунок 2.9 - Характеристика оптимально соотношения давлений
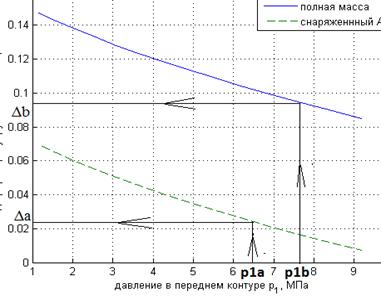
Рисунок 2.10 - график зависимости ∆=f(p1)
Задавшись d1=30мм и uпр=4, находим су:
 (2.20)
(2.20)
Находится преднатяг пружины РТМ. В первом приближении можно считать, что Fпра ≈ Fпрб :
 (2.21)
(2.21)
Диаметр поршня РТМ d2
находят решая
систему уравнений:
 (2.22)
(2.22)
Таблица 2.3 - параметры тормозного привода
|
параметр
|
обозначение
|
значение
|
|
диаметр КТЦ, см:
-передний -задний
|
dk1 dk2
|
4,6 3,4
|
|
диаметр ГТЦ, см
|
2,5
|
|
Активная площадь мембраны
усилителя, м2
|
A4
|
0,046
|
|
Площадь поршня следящего
устройства, м2
|
А2
|
1,13e-4
|
|
Площадь резиновой мембраны,
м2
|
А3
|
31e-4
|
|
Координаты точки а: -р1а,
МПа -р2а, МПа
|
|
6,404 6,404
|
|
Координаты точки б: -р1б,
МПа -р2б, МПа
|
|
7,615 7,615
|
|
Угол α, град
|
|
8
|
|
Деформация упругого
элемента,м: -полная масса -снаряженная масса
|
 
|
0,096 0,025
|
|
Жесткость упругого элемента
РТМ, Н/м
|
су
|
4,82е+4
|
|
преднатяг пружины РТМ, Н
|
Fпр
|
42
|
|
Диаметр поршня РТМ, мм
|
d2
|
32,36
|
3. Проектирование рулевого управления
.1 Разработка технических требований к рулевому управления
Рулевое управление - это совокупность устройств, обеспечивающих поворот
управляемых колес автомобиля при воздействии водителя на рулевое колесо.
Оно состоит из рулевого механизма и рулевого привода. Для облегчения
поворота колес в рулевой механизм устанавливается усилитель. Рулевой механизм
предназначен для передачи усилия от водителя к рулевому приводу и для
увеличения крутящего момента, приложенного к рулевому колесу. Он состоит из
рулевого колеса, вала и редуктора. Рулевой привод служит для передачи усилия от
рулевого механизма к управляемым колесам автомобиля и для обеспечения
необходимого соотношения между углами их поворота.
Конструкция рулевого управления должна обеспечивать:
1) легкость управления, оцениваемую усилием на рулевом
колесе. Для легковых автомобилей без усилителя при движении это усилие
составляет 50...100 Н, а с усилителем- 10...20 Н. Для грузовых автомобилей
усилие на рулевом колесе регламентируется ГОСТ 21398-75 и при переходе от
прямолинейного движения к движению по окружности радиусом 12 м при скорости 10
км/ч на горизонтальном участке с сухим твердым покрытием не должно превышать:
250 Н - для рулевого управления без усилителя на пути не более 17 м; 120 Н -
для рулевого управления с усилителем на пути не более 11 м; 500 Н - в случае
прекращения действия усилителя на пути не более 17 м;
2)
качение
управляемых колес с минимальными боковым уводом и скольжением при повороте
автомобиля. Несоблюдение этого требования приводит к ускорению изнашивания шин
и снижению устойчивости автомобиля при движении;
3)
стабилизацию
повернутых управляемых колес, обеспечивающую их возвращение в положение,
соответствующее прямолинейному движению, при отпущенном рулевом колесе;
4)
предотвращение
передачи ударов на рулевое колесо при наезде управляемых колес на препятствия;
5)
минимальные
зазоры в соединениях. Оцениваются углом свободного поворота рулевого колеса
автомобиля, стоящего на сухой, твердой и ровной поверхности в положении,
соответствующем прямолинейному движению. По ГОСТ 21398 - 75 этот зазор не
должен превышать 15° при наличии;
6)
отсутствие
автоколебаний управляемых колес при работе автомобиля в любых условиях и на
любых режимах движения.
7)
Данный автомобиль
предназначен для эксплуатации в условиях дорог общего пользования, как с усовершенствованным
покрытием, так и без такового. Характеристики дорожного покрытия представлены в
таблице 3.1. Эксплуатация осуществляется в зоне умеренного климата с рабочим
диапазоном температур -30…+30.
Таблице 3.1- Характеристики дорожного покрытия
|
Покрытие
|
Параметры дорожного
покрытия
|
|
j
|
f
|
|
асфальтобетон
|
0,45-0,8
|
0,013-0,02
|
|
грунт
|
0,2-0,6
|
0,025-0,15
|
Таблица 3.2 - Требования к рулевому управлению автомобиля.
|
Название требования
|
Значение
|
|
Усилие на рулевом колесе
при работе усилителя, Н
|
10 -
20
|
|
Усилие на рулевом колесе
при неработающем усилителе, Н
|
50 - 100
|
|
Число полных оборотов
рулевого колеса
|
3-4
|
|
Прямой КПД рулевого
управления
|
0,8-0,9
|
|
Обратный КПД рулевого
управления
|
0,6-0,8
|
|
Показатель реактивного
действия усилителя, 1/м
|
0,02-0,05
|
|
Минимальный радиус поворота
по оси следа внешнего колеса, м
|
6-8
|
3.2 Основные параметры и функциональные характеристики рулевого
управления
Далее определим функциональные параметры и характеристики рулевого
управления автомобиля. Основными параметрами рулевого управления являются
максимальные углы поворота управляемых колес и передаточное число рулевого
управления. В данном разделе приведем указанные параметры и характеристики,
используя материалы выполнения курсовой работы по дисциплине «Теория движения
автомобиля».
 (3.1)
(3.1)
(3.2)
где
Qemax, Qimax - соответственно наружный и внутренний углы поворота управляемых
колес;
L=2,85м - база
автомобиля;
J - шкворневая
колея автомобиля, определяемая по формуле:

где
B=1,85м - передняя колея автомобиля;
rf =0,05м -
радиус обкатки колеса.
Далее
определим среднее передаточное число рулевого управления:
(3.4)
где nр - число оборотов рулевого колеса, необходимое для поворота управляемых
колес из одного крайнего положения в другое, принимаем nр=3,5.
Используя данные зависимости можно построить теоретическую характеристику
поворота управляемых колес представленную на рисунке 3.1
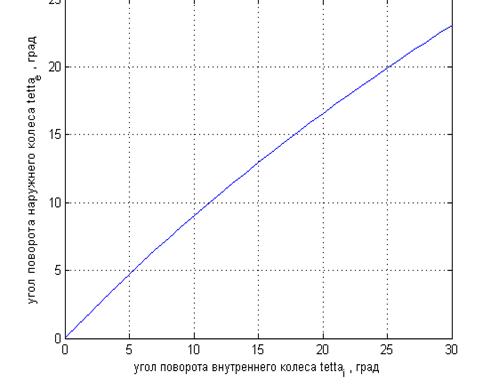
Рисунок 3.1- График зависимости угла поворота внешнего колеса от
внутреннего.
.3 Разработка принципиальной схемы рулевого управления
Проектируемый автомобиль имеет зависимую подвеску. Установим рулевую
трапецию выполненную в виде четырехзвенного шарнирного механизма с неразрезной
поперечной тягой. В процессе анализа существующих конструкций систем управления
современных грузовых автомобилей в качестве системы рулевого управления для
проектируемого автомобиля были выбраны:
способ поворота автомобиля - поворотом управляемых колес переднего моста;
тип рулевого привода - механический;
схема рулевого привода - рулевая трапеция в виде четырехзвенного
шарнирного механизма с неразрезной поперечной тягой, установленной спереди балки
моста;
конструкция рулевого механизма -реечный;
усилитель рулевого управления - гидравлический, с механической обратной
связью;
схема компоновки усилителя - встроенная;
распределительное устройство - тип В, без реактивных элементов с роторным
золотником.
Принципиальная схема рулевого управления приведена на рисунке 3.2.
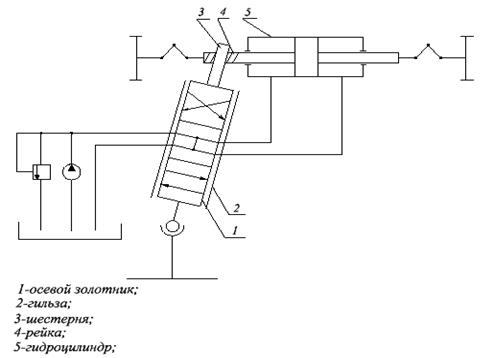
Рисунок 3.2 - Принципиальная схема рулевого управления
3.4 Определение параметров рулевого привода
Определению подлежат следующие параметры и характеристики рулевого
привода:
длина боковых рычагов r;
длина поперечной тяги u;
угол наклона боковых рычагов l;
Расчетная схема для определения параметров рулевого привода представлена
на рисунке 3.3.
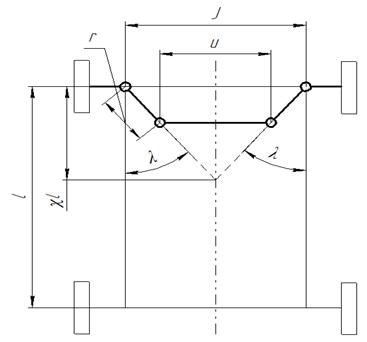
Рисунок3.3 - Расчетная схема рулевого привода
Параметры рулевой трапеции l, u, r выбираем такими, чтобы
обеспечивалась реализация теоретической характеристики поворота управляемых
колес с заданной точностью. В качестве критерия точности аппроксимации
используем условие:
Dqi=½qim-qiф½<30, (3.5)
где qim=¦(qe)
- теоретическая характеристика
поворота управляемых колес;
qiф=¦(qe) - фактическая характеристика поворота колес,
реализуемая трапецией при выбранных параметрах.
Угол наклона боковых рычагов l находят из условия пересечения их осей на расстоянии χl. Из геометрических соотношений
рисунка 3.3 можно записать:
 (3.6)
(3.6)
Приняв  :
:
 (3.7)
(3.7)
Далее из последнего рисунке запишем зависимость:
 (3.8)
(3.8)
Задаемся отношением r/u=0,16 и, выразив из уравнения (3.8)
длину продольной тяги u,
получим:
Используя отношение r/u=0,16 определим длину боковых
рычагов:
 (3.10)
(3.10)
Для построения фактической характеристики поворота колес qiф=¦(qe) воспользуемся расчетной схемой,
представленной на рисунке 3.4.
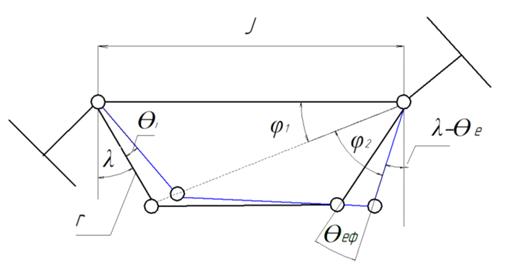
Рисунок 3.4 - расчетная схема для построения фактической характеристики
поворота колес
Для определения зависимости  рассчитаем следующие формулы:
рассчитаем следующие формулы:
 (3.11)
(3.11)
 (3.12)
(3.12)
 (3.13)
(3.13)
 (3.14)
(3.14)
Варьируя значением угла поворота внутреннего колеса  строим фактическую зависимость и сравниваем её с теоретической.
строим фактическую зависимость и сравниваем её с теоретической.
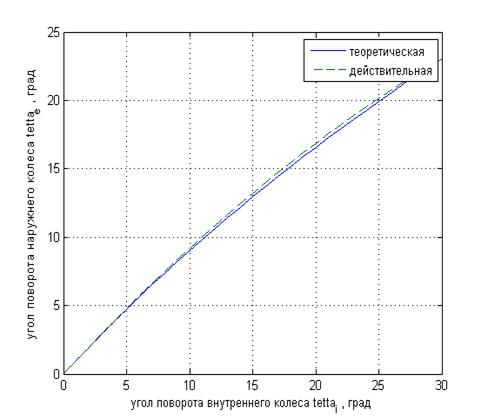
Рисунок 3.5 - Фактическая характеристика поворота управляемых колес
.4 Определение параметров рулевого механизма
Главными параметрами гидроцилиндра рулевого усилителя являются:
) диаметр поршня dп;
) ход поршня h;
) диаметр штока dш;
) давление в гидросистеме pном.
Из кинематического анализа можно принять ход поршня h=100мм. Исходя из конструкторских
соображений выбирается диаметр штока, dш=0,029м. pном назначается из стандартного ряда
давлений, принимается равным 6,3МПа.
Используя формулу Таборека вычисляется момент сопротивления повороту
управляемых колес:
 (3.15)
(3.15)
Диаметр поршня определяется по следующей формуле:
 , (3.16)
, (3.16)
Одним из основных параметров насосной установки является подача насоса Qн. Она должна быть такой, чтобы
гидроцилиндр обеспечивал поворот колес с большей скоростью, чем это в состоянии
сделать водитель. Иначе при быстрых поворотах усилитель будет создавать
дополнительное сопротивление. Для выполнения этого условия необходимо, чтобы
подача насоса была бы боль наибольшего расход жидкости Qmax, потребляемой исполнительным
механизмом: Qн ≥ Qmax. Значение Qmax вычисляется по формуле:
 (3.17)
(3.17)
где  -максимальная скорость поворота рулевого колеса;
-максимальная скорость поворота рулевого колеса;
 - объемный кпд гидроцилиндра;
- объемный кпд гидроцилиндра;
 - объемный кпд гидрораспределителя;
- объемный кпд гидрораспределителя;
 - передаточное число участка привода от рулевого колеса к
поршню гидроцилиндра.
- передаточное число участка привода от рулевого колеса к
поршню гидроцилиндра.
В данной курсовой работе, рассчитывая параметры распределителя,
необходимо только вычислить диаметр золотника dз:
 (3.18)
(3.18)
где  - плотность рабочей жидкости;
- плотность рабочей жидкости;
 - коэффициент расхода жидкости;
- коэффициент расхода жидкости;
 - потери давления при дросселировании жидкости в
распределителе при среднем положении золотника.
- потери давления при дросселировании жидкости в
распределителе при среднем положении золотника.
Центрирующие устройства в распределителях с роторным золотником -
торсионы, основными параметрами которого являются его длина lт(без опорных шеек) и диаметр dт.
Длину торсиона назначают из компоновочных соображений(lт=25мм), а диаметр находят из условия:
 (3.19)
(3.19)
где  - усилие на рулевом колесе, при котором усилитель включается
в работу;
- усилие на рулевом колесе, при котором усилитель включается
в работу;  - радиус рулевого колеса;
- радиус рулевого колеса;
G =
8,5е+4МПа - модуль упругости второго рода материала торсиона;
 - угол закрутки торсиона, соответсвующий началу включения
усилителя в работу.
- угол закрутки торсиона, соответсвующий началу включения
усилителя в работу.
Выбранные параметры должны удовлетворять условию прочности торсиона при
максимальном угле закрутки:
 , (3.20)
, (3.20)
где  - допускаемое касательное напряжение материала торсиона. Для
построения нагрузочной характеристики рулевого управления(рисунок 3.6) без
усилителя используется уравнение:
- допускаемое касательное напряжение материала торсиона. Для
построения нагрузочной характеристики рулевого управления(рисунок 3.6) без
усилителя используется уравнение:
 , (3.21)
, (3.21)
а при наличии усилителя - уравнение:
 . (3.22)
. (3.22)
Уравнение (3.22) используют для определения усилия на рулевом колесе при
0 ≤ Мс ≤ Мсmax. В случае, когда Мс ≥
давление в гидросистеме достигает номинального значения  и больше расти не будет. Поэтому
усилие, развиваемое гидроцилиндром усилителя, остается постоянным и
возрастающее сопротивление колес вызовет резкий рост усилия на рулевом колесе.
При Мс ≥ усилие на рулевом колесе определяют по уравнению:
и больше расти не будет. Поэтому
усилие, развиваемое гидроцилиндром усилителя, остается постоянным и
возрастающее сопротивление колес вызовет резкий рост усилия на рулевом колесе.
При Мс ≥ усилие на рулевом колесе определяют по уравнению:
 (3.23)
(3.23)
График зависимости  (рисунок 3.7) строят по уравнению:
(рисунок 3.7) строят по уравнению:
 . (3.24)
. (3.24)
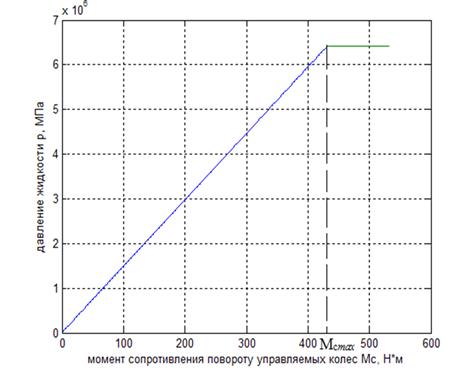
Рисунок 3.6 - Нагрузочная характеристика рулевого управления
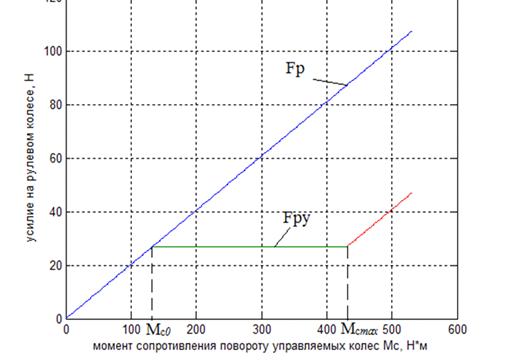
Рисунок 3.7- График зависимости
Заключение
В процессе выполнения курсового проекта была спроектирована система
управления легкового автомобиля Е-класса габаритной длиной 4,8м с полной массой
2210 кг.
На первом этапе были разработаны технические требования к системе
управления на основе существующих стандартов. Были выбраны схемы рулевого
привода и тормозной системы, а также типы и конструкции основных элементов
системы управления.
На этапе функционального проектирования были определены функциональные
характеристики системы управления и проведена оценка их эффективности.
Целью конструкторского проектирования было определение конструктивных
параметров исполнительных, силовых, и регулирующих элементов рулевого
управления и тормозной системы, а также разработка компоновки основных
элементов системы управления.
Спроектированная система управления отвечает современным требованиям к
автомобилям данного класса.
Список использованных источников
1Армейские
автомобили. Конструкция и расчет Ч.2, Ходовая часть и органы управления/ Под
ред. А.С. Антонова. -
Воениздат, 1973. -
480 с.
Автомобили.
Конструкция, конструирование и расчет. Системы управления и ходовая часть./ Под
ред. А.И. Гришкевича -
Мн.: Вышэйшая школа, 1987. - 200 с.
Горбатенко
Н.Н. Функциональное проектирование рулевого управления автомобилей.
Методические указания для курсового и дипломного проектирования.- Могилев: ММИ,
1997. - 29 с.
Шасси
автомобиля. Атлас конструкций. - М.: Машиностроение, 1977. - 108 с.
Раймпель Й.
Шасси автомобиля: Рулевое управление./ Пер. с нем. - М.: Машиностроение, 1987. - 232 с.