Практика моделирования и оптимизации линейных систем в среде расширения MatLab Control System
Министерство образования и науки
Республики Казахстан
Северо-Казахстанский Государственный
университет
имени Манаша Козыбаева
Факультет машиностроения и энергетики
Кафедра «Радиоэлектроники и
телекоммуникации»
«Утверждаю»
_____________________
И.о.зав. каф.
РиТ, д.т.н., Ивель В.П.
«_______»
__________________2007 г.
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к дипломному проекту
на тему: «Практика моделирования и
оптимизации линейных систем в среде расширения MatLab Control System»
М3РТ.466400.023 ПЗ
Консультанты:
по нормоконтролю
Димитриади Н.А. «________» _________________
по
организационно-экономической части Герасимова Ю.В. «________»
Дипломник
студент гр.
МКТС-01-ЗО Шершнев П.В. «________»_________________
Петропавловск 2007
Аннотация
Дипломный проект посвящен вопросу практического моделирования и
оптимизации линейных систем в среде MatLab.
Проводится анализ линейных звеньев с применением таких программных
пакетов как Control System Toolbox и Simulink, в частотности рассматриваются
методы построения переходных и частотных характеристики звеньев второго
порядка.
В качестве наглядного примера практического моделирования в проекте
представлена модель релейной системы регулирования и идентификации структуры
отдельного характерного элемента ЭКС зубца Р в системе MatLab.
Как и любой программный продукт, разрабатываемая модель имеет свои
преимущества и недостатки, поэтому необходимо определить, как долго модель
может работать без сбоев и ошибок, т.е. дать анализ надежности полученного
программного продукта. Такой анализ проводится в одном из разделов работы.
Стоимость рассчитывается в экономической части диплома.
В разделе "Охрана труда" рассмотрены
вопросы, связанные с техникой безопасности при работе с компьютерами.
The summary
Degree project is devoted to a question of practical modelling and
optimization of linear systems in MatLab environment.analysis of linear parts
with application of such software packages as Control System Toolbox and
Simulink Is spent, in rate methods of construction transitive and frequency characteristics
of parts of the second order are considered.a bright example of practical
modelling in the project the model of relay system of regulation and
identification of structure of separate characteristic element ECS tooth Р in
system MatLab is presented.well as any software product, developed model has
the advantages and lacks, therefore it is necessary to define, how long the
model can work without failures and mistakes that is to give the analysis of
reliability of the received software product. Such analysis is spent in one of
sections of work.pays off in an economic part of the diploma.
In section "Labour safety" the questions connected with the
safety precautions at work with computers are considered.
Содержание
1. Введение
. Моделирование в среде MatLab и Simulink
.1 Анализ линейных звеньев с применением Control System
Toolbox
.2 Моделирование в среде Simulink
.3 Моделирование процесса свертки функций
.4 Модель релейной системы регулирования
.5 Моделирования элементов ЭКГ при патологии
. Надежность программного обеспечения
.1 Неконструктивность понятия правильной программы
.2 Надежность программного средства
.3 Количественное измерение надежности программы
.4 Обеспечение надежности разработки программных средств
.5 Методы борьбы со сложностью
.6 Обеспечение точности перевода
.7 Преодоление барьера между пользователем и разработчиком
.8 Контроль принимаемых решений
.9 Тестирование
. Определение цены программного продукта
.1 Расчет основной заработной платы
.2 Расчет дополнительной заработной платы
.3 Расчет затрат на материалы, покупные изделия,
полуфабрикаты
.4 Затраты на оплату машинного времени
.5 Расчет накладных расходов
.6 Расчет себестоимости программного продукта
. Техника безопасности при работе с компьютерным
оборудованием
.1 Анализ опасных, вредных факторов и возможных чрезвычайных
ситуаций, возникающих при работе компьютере
.2 Разработка мер безопасности
Заключение
Список литературы
1. Введение
В теории проектирования систем автоматического
управления важное место уделяется анализу и синтезу линейных систем с
постоянными параметрами. Это объясняется следующими обстоятельствами:
• при описании динамики системы в отклонениях от
положения равновесия или номинальной траектории движения получаем линейную
(линеаризованную) систему;
• теория линейных систем с постоянными параметрами
представляет наиболее развитой и законченный раздел теории автоматического
управления;
• линейные системы после фиксации
("замораживания") параметров описываются линейными дифференциальными
или разностными уравнениями с постоянными параметрами;
• при предварительных исследованиях систем
автоматического управления на этапах эскизного проектирования при неполной
информации об объекте управления обычно используют упрощенную линейную модель
объекта с постоянными параметрами, которую уточняют на дальнейших этапах
проектирования.
Истоки создания системы MatLab связаны с решением
задач линейной алгебры и повышением эффективности использования математических
пакетов LINPACK и EISPACK, предназначенных для работы с матрицами. Если
вспомнить, что источником математических моделей в виде линейных систем с
постоянными параметрами являются линейные дифференциальные или разностные
уравнения с постоянными коэффициентами, то становится понятным, что
теоретической основой исследования этих уравнений является линейная алгебра.
Поэтому ядро системы MatLab составляет органическую основу тех операторов,
которые входят в состав пакета прикладных программ (далее - ППП) Control System
Toolbox.
При реализации этого пакета использованы принципы
объектно-ориентированного программирования. Введен новый класс объектов:
линейные системы с постоянными параметрами (linear time invariant objects,
lti-объекты). Этот класс включает линейные непрерывные или дискретные,
одномерные с одним входом и одним выходом (SISO-системы) и многомерные со
многими входами и (или) многими выходами (МIМО-системы). Каждому объекту
присваивается определенный идентификатор.
Модель lti -системы в теории автоматического
управления может быть задана:
• четверкой матриц {А, В, С, D}, которая описывает
дифференциальное (или разностное) векторное уравнение системы в пространстве
состояний в явной форме Коши;
• двумя векторами, задающими коэффициенты многочленов
числителя и знаменателя передаточной функции системы;
• двумя векторами и одним числом, задающими нули,
полюсы и обобщенный коэффициент передачи передаточной функции системы.
В соответствии с этим lti -система в ППП Control
System Toolbox может быть представлена тремя подклассами:
• четверкой матриц - подкласс ss в пространстве
состояний;
• двумя векторами, составленными из коэффициентов
числителя и знаменателя, - для одномерных систем, или двумя массивами ячеек,
содержащих векторы коэффициентов, - для многомерных систем, что соответствует
подклассу tf (передаточная функция в виде отношения многочленов либо матрица
таких передаточных функций);
• двумя векторами, составленными из нулей и полюсов
передаточной функции, и скаляром, равным обобщенному коэффициенту передачи -
для одномерных систем, или двумя массивами ячеек, содержащих векторы,
составленные из нулей и полюсов, и массивом чисел - для многомерных систем, что
соответствует подклассу zpk (передаточная функция в виде нулей, полюсов и
обобщенного коэффициента передачи либо матрица таких передаточных функций).
Модель системы, заданная в одном из этих подклассов,
может быть преобразована в любой другой подкласс.
Дополнительные параметры позволяют указать, является
ли система непрерывной или дискретной, имеет ли запаздывания на входах системы;
задать наименования входов, выходов или переменных состояния, а также другую
вспомогательную информацию о системе.
В ППП Control System Toolbox введен ряд функций,
позволяющих определять динамические параметры системы: нули и полюсы,
собственные частоты и коэффициенты демпфирования и т. д. Имеются функции,
позволяющие рассчитывать и строить переходные функции и частотные
характеристики систем.
Наряду с задачами анализа ППП позволяет решать задачи
синтеза регуляторов для линейных систем автоматического управления с
постоянными параметрами. В пакет введен ряд функций для синтеза регулятора на
основе желаемого расположения полюсов или обеспечения минимального значения
квадратичного критерия качества (ЛК-регулятор), синтеза наблюдателя и фильтра
Калмана для оценки переменных состояния системы по известным значениям векторов
входа и выхода. Поддержан также синтез динамических регуляторов на основе
синтеза ЛК-регулятора и фильтра Калмана (ЛКГ-регулятор).
2. Моделирование в среде
MatLab и Simulink
.1 Анализ линейных звеньев с
применением Control System Toolbox
релейный система модель matlab
Моделирование можно рассматривать как замещение
исследуемого объекта (оригинала) его условным образом, описанием или другим
объектом, именуемым моделью и обеспечивающим адекватное с оригиналом поведение
в рамках некоторых допущений и приемлемых погрешностей. Моделирование обычно
выполняется с целью познания свойств оригинала, путем исследования его модели,
а не самого объекта. Разумеется, моделирование оправдано в том случае, когда
оно проще создания самого оригинала или когда последний по каким-то причинам
лучше вообще не создавать.
Математическое моделирование - это область науки и
техники, которая обеспечивает выявление закономерностей протекания различных
явлений окружающего нас мира или работы систем и устройств путем их
математического описания и моделирования без проведения натурных испытаний. При
этом используются фундаментальные положения и законы математики, описывающие
моделируемые явления, системы или устройства на некотором уровне их идеализации.
Таким образом, математическая модель системы или
устройства это или иное математическое описание их, обеспечивающее имитацию
работы систем или устройств на уровне, достаточно близком к реальному поведению
их, получаемому при натурных испытаниях систем или устройств. Критерием
корректности модели мы будем считать достаточно малую погрешность (чаще всего
среднеквадратическую) результатов моделирования.
Математическое моделирование общественных,
экономических, биологических и физических явлений, объектов, систем и различных
устройств - важнейшее средство познания природы и проектирования самых
разнообразных систем и устройств. Хрестоматийными стали примеры эффективного
использования моделирования в создании ядерных технологий, авиационных и
аэрокосмических систем, в прогнозе атмосферных и океанических явлений, погоды и
так далее.
Однако для таких серьезных сфер моделирования нередко
нужны суперкомпьютеры и годы работы крупных коллективов ученых по подготовке
данных для моделирования к его отладки. Тем не менее и в этом случае
математическое моделирование сложных систем и устройств не только экономит
средства на проведение исследований и их разработок, но и порой спасает жизни
людей и устраняет экологические катастрофы. Здесь примером может служить отказ
от испытания ядерного и термоядерного оружия в пользу его математического
моделирования или моделирование аэрокосмических систем перед их реальными
полетами.
Между тем математическое моделирование на уровне
решения более простых задач, например из области механики, электротехники,
электроники и радиотехники (и многих других областей науки и техники) в
настоящее время стало доступным многим пользователям современных ПК. А при
использовании обобщенных моделей становится возможным моделирование и
достаточно сложных систем, например электроэнергетических систем или
промышленных комплексов
Как известно, сложные электрические цепи постоянного
тока легко описываются системами линейных уравнений, составленными на основе
законов Кирхгофа, - например методами узловых потенциалов и контурных токов.
Для цепей переменного тока придется составлять такие уравнения с комплексными
элементами А для моделирования динамических систем и устройств придется
составлять и решать системы дифференциальных уравнений, чаще всего нелинейных.
Матричная система МАТLАВ - идеальное средство для реализации такого
моделирования.
В данном описании под моделью подразумевается блочная
(функциональная) диаграмма системы или устройства, содержащая ее компоненты в
виде отдельных блоков и подсистем с соответствующим описанием их свойств. Это
описание, как правило, носит внутренний характер и количественно может
корректироваться изменением параметров в списке параметров каждого компонента.
С помощью подсистем пользователь может составлять свои собственные сложные
компоненты. Набор виртуальных регистрирующих устройств позволяет контролировать
поведение созданной модели.
Следует различать аналитическое моделирование и
численное моделирование. При аналитическом моделировании его результаты
представляются в виде аналитических выражений - проще говоря, формул. Например,
подключив RС-цепь к источнику постоянного напряжения Е (R, С и Е - компоненты
данной модели), можно составить аналитическое выражение для временной
зависимости напряжения и(t) на конденсаторе С. Результатом будет линейное
дифференциальное уравнение, которое и является аналитической моделью данной
простой линейной цепи. Его аналитическое решение, при так называемом начальном
условии и(0) = 0, означающем разряженный перед моделированием конденсатор С,
позволяет найти искомую зависимость - результат моделирования в виде формулы и
= и(t).
Однако даже в этом простейшем примере потребуются
умственные усилия для решения дифференциального уравнения или для применения
СКМ с символьными вычислениями - систем компьютерной алгебры. Для этого вполне
тривиального случая решение задачи моделирования линейной RC-цепи дает
аналитическое выражение достаточно общего вида - оно пригодно для описания
работы цепи при любых номиналах компонентов R, С и Е и описывает экспоненциальный
заряд конденсатора С через резистор R от источника постоянно напряжения Е.
Безусловно, нахождение аналитических решений при
аналитическом моделировании оказывается исключительно ценным для выявления
общих теоретических закономерностей простых линейных цепей, систем и устройств.
Однако сложность его резко нарастает по мере усложнения воздействий на модель и
увеличении порядка и числа уравнений, описывающих моделируемый объект.
Можно получить более или менее обозримые результаты
при моделировании объектов второго или третьего порядка, но уже при большем
порядке аналитических выражения становятся чрезмерно большими, сложными и
трудно осмысляемыми. Между тем даже простой электронный усилитель нередко
содержит десятки компонентов. Тем не менее, многие современные системы
компьютерного моделирования (СКМ), например системы символьной математики
Mathematica или Maple, способны в значительной мере автоматизировать решение
сложных задач аналитического моделирования.
Численное моделирование заключается в получении
необходимых количественных данных о поведении систем или устройств каким-либо
подходящим численным методом. Например, для решения дифференциального уравнения
или систем дифференциальных уравнений в более сложных случаях могут
использоваться хорошо известные численные методы Эйлера или Рунге - Кутта. В
этом случае решение в аналитическом виде не получается, но по данным численного
моделирования можно получить достаточно полные данные о поведении моделируемых
систем и устройств, а также построить графики описывающих это поведение
зависимостей.
Означает ли все это ущербность системы МАТLАВ в
решении задач математического моделирования. Конечно же нет. Все обстоит совсем
наоборот. Как уже отмечалось, трудности аналитического моделирования даже
линейных объектов и систем стремительно нарастают по мере роста порядка моделей
и числа ее компонентов. В реальных задачах, когда моделируемая система состоит
из десятков или сотен компонентов модели, результаты аналитического
моделирования становятся совершенно необозримыми, бесполезными и зачастую
ошибочными. Составление исходной системы уравнений вручную, табличными методами
или с помощью графов превращается в сложную задачу даже для самых опытных
математиков. При этом ошибки становятся скорее правилом, чем исключением.
МАТLАВ, будучи мощной матричной системой, открывает
обширные возможности в выполнении численного моделирования как линейных, так и
нелинейных систем и устройств, описываемых большими системами уравнений. Такое
моделирование предполагает решение системы уравнений состояния достаточно
апробированными и хорошо известными численными методами - в том числе на основе
рекуррентных и итерационных алгоритмов. Уравнения состояния реальных систем и
устройств часто содержат множество нулевых коэффициентов, что порождает
разреженные матрицы и массивы. Их аппарат прекрасно представлен в базовой
системе МАТLАВ.
Как известно, нелинейные системы и устройства
описываются алгебраическими или дифференциальными нелинейными уравнениями,
которые принципиально не имеют аналитических решений. Поэтому на практике
моделирование нелинейных систем и устройств на основе использования численных
методов оказывается намного более полезным, чем аналитическое моделирование
отдельных частных линейных цепей, систем или устройств. Это также выдвигает
МАТLАВ на роль лидера среди средств моделирования.
В настоящее время известно множество программных
средств моделирования частного характера. Например, для моделирования
электронных схем применяются программы схемотехнического моделирования MicroСАР,
Pspise, Electronic Workbenche и др. Они обычно содержат обширные библиотеки
полупроводниковых и схемных компонентов и представляют результаты в привычном
для пользователя виде - например в виде осциллограмм их виртуальных
осциллографов или показаний виртуальных вольтметров и амперметров. Однако
применение таких систем носит частный и потому довольно ограниченный характер,
хотя в своей области многие такие программы являются подлинным шедевром
изобретательности их создателей.
Разработчики системы МАТLАВ + Simulink отказались от
конкуренции с разработчиками подобных программ узкого назначения. Они
сосредоточили свое внимание на решении куда более важной и сложной задачи -
моделирования блочных динамических систем и устройств произвольного назначения.
Это физические и химические системы и устройства, электротехнические устройства
(и даже целые энергетические системы), механические системы и устройства и т.д.
и т. п. Для этого пришлось существенно расширить библиотеки компонентов таких
систем и устройств, с одной стороны, а с другой стороны, применить укрупненные
модели ряда компонентов. Именно благодаря этому возможно моделирование сложных
систем и устройств.
Одной из самых сложных проблем в реализации
математического моделирования в среде системы МАТLАВ стала подготовка модели
моделируемой системы или устройства. Модель обычно представляется в форме
графического, табличного или таблично-топологического описания. При этом
необходимо предусмотреть организацию связей между компонентами и установку их,
подчас многих, параметров. После этого надо запустить созданную модель на
исполнение, т. е. решение автоматически составленной системы уравнений
состояния и вывод результатов решения. Это также представляет собой достаточно
сложную проблему.
Все эти проблемы блестяще решены введением в МАТLАВ
второй важной части системы - расширения Simulink. Это расширение реализует по
существу визуально-ориентированное программирование задач автоматического
составления графической модели системы или устройства, составления и решения ее
уравнений состояния и наглядного представления результатов моделирования.
Уже в силу своего названия Simulink выполняет как бы
симуляции работы моделируемых систем и устройств или имитационное
моделирование.
В тоже время новые версии Simulink интенсивно
развиваются в направлении развития техники моделирования систем и устройств,
структура которых может изменяться под воздействием ситуаций, которые
характерны для работы устройств в те или иные моменты времени. Другими словами,
развивается направление ситуационного моделирования. Специальное расширение
StateFlow BlockSet обеспечивает расширенные возможности ситуационного
моделирования - в частности, позволяет динамике отслеживать связи между блоками
моделей и строить наглядные SF-диаграммы.
Однако все же наибольшими возможностями в области
моделирования и оптимизации линейных систем обладает пакет Control System
Toobox. Пакет Control System содержит средства для выбора параметров обратной
связи. Реализованы различные методы анализа систем: анализ особых точек,
определение коэффициента усиления и затухания, линейно-квадратичное
регулирование и др. Пакет Control System включает большое количество алгоритмов
для проектирования и анализа систем управления. Кроме того, он обладает
настраиваемым окружением и позволяет создавать свои собственные m-файлы.
Система MATLAB, включая пакет Simulink, образуют
мощное средство для проектирования систем автоматического управления (САУ). В
теории проектирования САУ важное место уделяется моделированию, анализу и
синтезу линейных систем с постоянными параметрами. Для этих целей в системе
MATLAB используют пакет Control System Toolbox [1], кроме того, пакет Simulink
содержит большой набор средств, который позволяет создавать и анализировать
объекты и системы самого различного назначения.
При реализации пакета Control System Toolbox
использованы принципы объектно-ориентированного программирования. Введен новый
класс объектов: линейные системы с постоянными параметрами (linear time
invariant objects, или lti-объекты). Этот класс включает линейные непрерывные
или дискретные, одномерные с одним входом и одним выходом (SlSO-системы) и
многомерные со многими входами и (или) многими выходами (MIMO-системы). Каждому
объекту присваивается определенный идентификатор.
Функции пакета реализуют методы исследования
динамических систем, основанные на использовании передаточных функций и моделей
для переменных состояния. Частотные и временные характеристики, нули и полюсы
систем легко вычисляются и отображаются в виде графиков и диаграмм.
В пакете реализованы:
- обширный набор средств для анализа одномерных и
многомерных динамических систем (объектов);
- построение основных характеристик систем:
импульсной, передаточной и переходной, реакция на произвольное воздействие;
построение частотных характеристик: диаграмм Воде,
Найквиста, Николса и др.;
разработка замкнутых систем регулирования;
проектирование регуляторов;
определение характеристик моделей: управляемости,
наблюдаемости, понижения порядка моделей;
поддержка систем с запаздыванием.
Интерактивная среда для отображения временного и
частотного откликов предоставляет пользователю графические управляющие элементы
для одновременного отображения данных откликов и переключения между ними. Можно
вычислять различные характеристики откликов, такие, как время регулирования.
Интерактивная среда для отображения временного и
частотного откликов предоставляет пользователю графические управляющие элементы
для одновременного отображения данных откликов и переключения между ними. Можно
вычислять различные характеристики откликов, такие, как время регулирования.
Основными вычислительными объектами рассматриваемого
пакета являются:
- родительский объект (класс) LTI (Linear
Time-Invariant Systems - линейные, инвариантные во времени (стационарные)
системы);
- дочерние объекты (подклассы класса LTI),
соответствующие четырем видам моделей:
В так называемой tf-форме (в форме передаточной
функции)
 . (2.1)
. (2.1)
В
zpk-форме (путем задания нулей, полюсов и коэффициента усиления):
 . (2.2)
. (2.2)
В
ss-форме (в виде системы дифференциальных уравнений для переменных состояния):
'(t)
= Ax(t) + Bu(t), (2.3)(t) = Cx(t) + Du(t).
(для
дискретных объектов - системы разностных уравнений).
В
frd-форме - в виде набора (вектора) частот ωk и соответствующих значений комплексного коэффициента передачи W(jωk).
При
описании дискретных объектов комплексная переменная р заменяется на z. В
зависимости от выбора модели линейный объект (система) может быть задан либо
парой многочленов (числитель и знаменатель передаточной функции), либо тройкой
параметров (нули, полюса, обобщенный коэффициент передачи), либо четверкой
параметров (А, В, С, D) для моделей в пространстве состояний. Для описания
одномерных (SISO) систем используются одномерные и двумерные массивы, в случае
многомерных объектов - массивы ячеек.
Пакет
Control System обеспечивает создание структуры данных для моделей любого из
перечисленных видов в форме массива ячеек, не зависящего от конкретного
представления модели. Это позволяет манипулировать линейной системой как единым
объектом, а не набором данных в виде векторов или матриц.
В
состав пакета Control System входит более ста различных функций. В данной
работе рассматривается группа функций, обеспечивающая получение информации об
отдельных характеристиках моделей различных звеньев САУ с помощью графического
интерфейса.
Для
вызова графического интерфейса GUI служат две функции - ltiview и rltool [2].
Функция rltool позволяет корректировать динамические свойства замкнутой
одномерной системы управления. В данном случае эта функция интереса не
представляет. Функция ltiview открывает специальное средство просмотра
временных и частотных характеристик линейных стационарных систем - LTI-viewer
(рисунок 2.1).

Рисунок 2.1 - Меню окна LTI- viewer
Рассмотрим работу интерфейса GUI на примере звена
второго порядка
 , (2.4)
, (2.4)
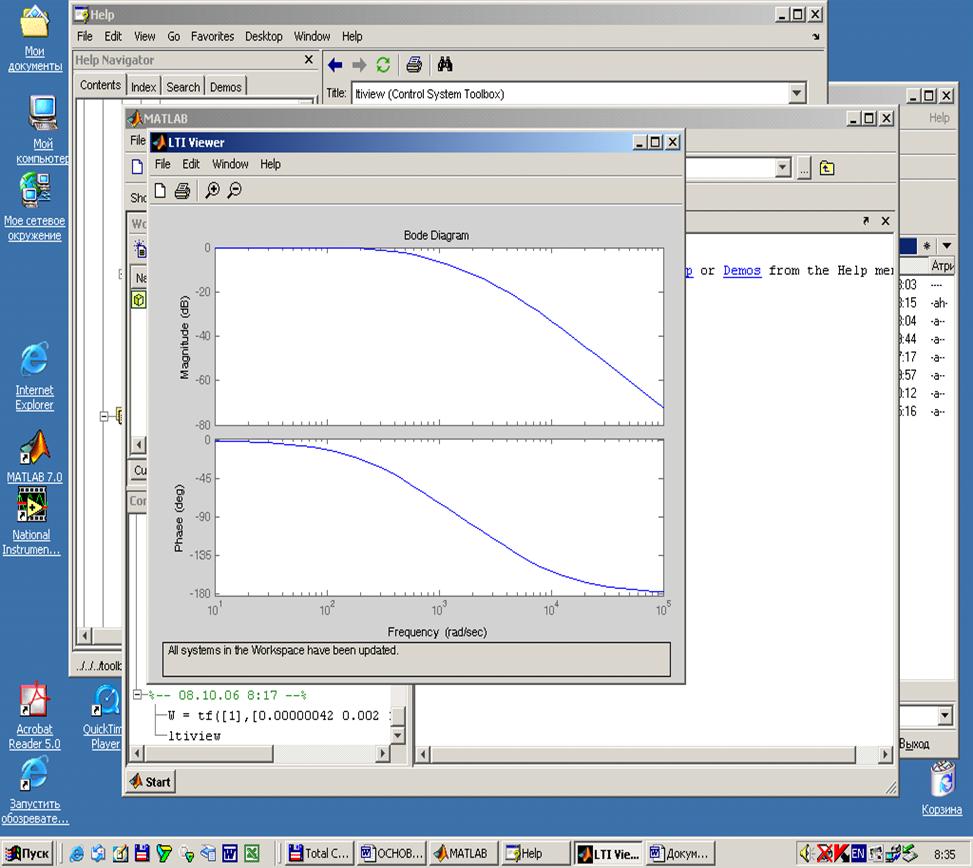
где
значение постоянных времени T1 = 0,00000042 с, T2 = 0,002 с.
Выполним
загрузку этой передаточной функции в рабочую среду системы MATLAB.
>>
W = tf([1],[0.00000042 0.002 1])
Выберем
команду Import в меню File. Откроется окно LTI Browser. В окне будет
представлена одна модель с именем W (рисунок 2.2).
Подтвердим выбор нажатием кнопки ОК. При этом окно
загрузки закроется и откроется график переходной функции.
Можно получить информацию о координатах любой
произвольной точке на графике, если подвести к ней указатель мыши и нажать на
правую кнопку мыши. Чтобы получить другие временные и частотные характеристики
выбранного звена выберем пункт меню Edit/Plot Configuration. В этом случае
откроется окно диалога вида рисунок 2.4, которое позволит выбрать интересующую
нас характеристику. Это может быть импульсная характеристика Impulse (реакция
системы на единичный импульс), переходная характеристика Step Nyquist (реакция
системы на единичное ступенчатое воздействие), частотные характеристики в виде
диаграммы Bode (реакция системы на гармонический сигнал), годограф Найквиста в
виде амплитудно-фазочастотной характеристики и др.
2.2 Моделирование в среде Simulink
Временные и частотные характеристики уже реализованные с помощью пакета
Control System Toolbox можно также построить в среде визуального моделирования
Simulink.
Программное средство Simulink - типичный представитель
визуально-ориентированного языка программирования. На всех этапах работы,
особенно при подготовке моделей систем, пользователь практически не имеет дела
с обычным программированием. Программа автоматически генерируется в процессе
ввода выбранных блоков компонентой, их соединений и задания параметров
компонентов.
И хотя процесс моделирования в среде Simulink занимает больше времени,
сама практика составления структурных схем способствует лучшему пониманию
теоретических основ САУ и подготавливает пользователя к работе с более сложными
моделями.
Исследование переходной характеристики колебательного звена реализуется с
помощью модели, представленной на рисунке 2.7.
Единичная ступенчатая функция формируется с помощью
источника одиночного перепада Step. Параметры источника:
- Step time = 0 - время появления
перепада (скачка);
- Initial value = 0 - начальное
значение воздействия;
- Final value = 1- конечное значение
воздействия;
- Sample time = 0 - эталонное время
(параметр используется для согласования источника и других компонентов модели).
Выход источника подключен к блоку передаточной функции Transfer Fcn,
исходные данные которого следующие:
- Numerator (числитель) [1];
- Denominator (знаменатель) [0.00000042 0.002 1].
При внесении числовых значений передаточной функции необходимо соблюдать
следующие правила: запись производится в квадратных скобках, целые и десятые
доли десятичных дробей разделяются точкой, числа между собой разграничены
пробелом.
Далее выбирается в меню Simulation/Configuration Parameters и
устанавливаются следующие значенияtime (интервал моделирования):
- Start time: 0.0 (начальное время);
- Stop time: 0.06 (конечное время).
Solver options (параметры решателя):
- Type (метод интегрирования);
Variable-step (переменный шаг) ode45(Dormand-Prince)
(одношаговый метод)step size (максимальный шаг интегрирования): auto
Min step size (минимальный шаг интегрирования): auto
Реакция звена на единичное ступенчатое воздействие
регистрируется на виртуальном осциллографе Scope.
Теперь можем посмотреть результаты моделирования
(рисунок 2.8), нажав кнопку «Start» панели инструментов рабочего окна и щелкнув
два раза по осциллографу Scope.
Чтобы полученный график был более наглядным необходимо настроить
параметры окна Scope, с помощью семи кнопок, находящихся в этом окне на панели
инструментов:
- Zoom (масштаб) - изменение масштаба осей графика;
- Zoom X-axis (масштаб по оси Х) - изменение масштаба по оси абсцисс;
Zoom Y-axis (масштаб по оси У) - изменение по оси ординат;
Autoscale (автоматическое масштабирование) - автоматическая установка
оптимального масштаба осей;
Save current axes setting (сохранение текущих параметров масштаба) -
сохранение установленного масштаба осей;
Properties (свойства) - открытие окна настройки параметров (свойств)
блока Scope;
Print (печать) - печать содержимого окна Scope.
Первые три кнопки являются альтернативными, то есть в каждый момент
времени может быть «нажата» только одна из них.
Некоторые настройки могут быть выполнены с помощью команд контекстного
меню, которое вызывается на экран щелчком правой мыши (указатель мыши при этом
должен находиться внутри координатной сетки). Контекстное меню содержит четыре
команды: восстановление исходного масштабы осей (Zoom out), автоматическое
восстановление (Autoscale), сохранение установленного масштаба осей (Save
current axes settings), флажок floating scope позволяет не связывать напрямую
блок Scope с другими блоками.
Сравнивая рисунок 2.3 и рисунок 2.8, можно прийти к
заключению о практически полной идентичности результатов, полученных двумя
разными методами.
Моделирования весовой функции осуществляется с помощью
той же модели (рисунок 2.7), но входной сигнал в этом случае представляет собой
дельта-функцию.
В качестве достаточно точного приближения к
дельта-функции можно использовать импульс с единичной площадью и длительностью
порядка 10-6с и амплитудой 106ед. Таким образом, единичный импульс на рисунке
формируется с помощью источника одиночного перепада Step. Нажав левой клавишей
мыши на этот блок, мы сможем подставить необходимые значения:
- Step time = 0,000001 - время
появления перепада (скачка);
- Initial value = 1000000- начальное
значение воздействия;
- Final value = 0 - конечное значение
воздействия;
- Sample time = 0 - эталонное время.
Значения параметров общего моделирования Simulation
Parameters остаются без изменений, как и при построении переходной
характеристики.
Значения параметров моделирования Simulation
Parameters из раздела командной строки рабочего окна Simulation остаются без
изменений.
Запустим процесс моделирования. Сравнив полученные
результаты (рисунок 2.9) с уже имеющимися (рисунок 2.5) убедимся, что разница
визуально не различима.
Несколько сложнее строится структура для получения
частотных характеристик. Один из вариантов модели для получения логарифмических
амплитудно-частотных характеристик (ЛАЧХ) представлен на рисунке 2.10.
Для построения структурной схемы (рисунок 2.10) используются блоки: Ramp,
Fch и XY Graph. Блок Ramp имитирует линейно нарастающее изменение частоты
входного сигнала вида F(u)=k*u. Окно настройки блока заполняется следующим
образом:
- Slope = 1 или k=1 - угловой
коэффициент временной зависимости F(u);
- Start time = 0 - начальное время;
- Initial value = 1 - начальное
значение частоты.
Последний параметр выбран из соображений реализуемости
модели, так как lg1 = 0.
Блок Fcn1 - моделирует ЛАЧХ апериодического звена
второго порядка
 . (2.5)
. (2.5)
Для
моделирования использовались уже известные исходные данные:
- k = 1;
- T1 = 0,00000042;
- T2 = 0,002;
- ω = u.
Во второй блок Fcn2 записывается функция lgu для
достижения логарифмического масштаба частоты.
Окно задания параметров графопостроителя в системе
полярных координат XY Graf заполняется следующим образом: xmin = 0, xmax = 5,
ymin = 0; ymax = 50, Samp time = 0. В качестве координаты X здесь используется
частота u в логарифмическом масштабе, а для задания координаты Y используется
L(u), т.е. ЛАЧХ.
Теперь можно установить параметры моделирования. Для
этого выполняется команда Simulation Parameters в меню Simulation и заполняется
открывшееся окно.Parameters (интервал моделирования):time: 0.0 (начальное
время)time: 100000 (конечное время)options (параметры решателя):(метод
интегрирования):step (фиксированный шаг) ode45(Dormand-Prince) (одношаговый
метод Дормана-Принсе)step size: 1 Mode (режим расчета): Single Tasking
(однозадачный).
После выполнения перечисленных всех пунктов
производится запуск процесса моделирования, нажав при этом кнопку (Start/Pause
Simulation) на панели инструментов Simulink.
Результаты моделирования представлены на рисунке 2.11.
Для получения логарифмических фазо-частотных
характеристик (ЛФЧХ) необходимо использовать более сложную модель (рисунок
2.12). Для пояснения предложенной структуры рассмотрим выражение для
фазо-частотной характеристики [3]
 . (2.6)
. (2.6)
Простой
анализ этого выражения показывает, что при переходе частоты через значение  к выходному сигналу блока Fcn1 необходимо прибавить
постоянную равную значению π (3,1415926), что достигается с помощью релейной функции Relay1, которая обеспечивает
скачкообразное изменение φ(ω)
при переходе частоты через значение
к выходному сигналу блока Fcn1 необходимо прибавить
постоянную равную значению π (3,1415926), что достигается с помощью релейной функции Relay1, которая обеспечивает
скачкообразное изменение φ(ω)
при переходе частоты через значение  =1543.
=1543.
Результаты моделирования ЛФЧХ представлены на рисунке
2.13.
2.3 Моделирование процесса
свертки функций
Представляет интерес моделирования структуры,
поясняющий основополагающий принцип линейных систем - принцип суперпозиции.
Основа этого принципа заключается в том, реакция системы на любую комбинацию
внешних воздействий равна сумме реакций на каждое из этих воздействий, поданных
на систему порознь. Принцип суперпозиции позволяет выразить реакцию системы на
любое произвольное воздействие через реакцию системы на элементарное типовое
воздействие, например, в виде дельта-функции (рисунок 2.14). Для этого достаточно
представить данное входное воздействие в виде совокупности выбранных типовых
воздействий.
Математическую формализацию этого принципа можно представить выражением
теоремы для свертки функций в вещественной области.
 (2.7)
(2.7)
здесь x(t) - входное воздействие; y(t) - выходное
воздействие; интеграл в правой части называется интегралом Дюамеля.

Реакция системы на единичный импульс в виде
дельта-функции, приложенной к системе в момент времени t =t , известна - эта импульсная
переходная функция w(t - t).
Очевидно, что реакция системы на импульс величиной x(t)dt, приложенный к системе в тот же момент времени t=t, есть w(t-t) x(t)dt. Реакция системы на всю совокупность импульсов, т. е. на управляющее
воздействие x(t), определяется приведенным равенством, т. е. состоит из суммы
реакций на каждый импульс в отдельности. Пусть t является моментом наблюдения
за реакцией системы x(t), разность - интервалом времени (б) между моментом
приложения к системе импульса x(t)dt и
рассматриваемым (текущим) моментом времени t>t. Функция w(t-t) будет определять, таким образом, степень участия импульсов,
приложенных к системе до рассматриваемого момента времени в образовании
значения y(t) реакции системы в текущий момент времени t. Влияние импульсов,
предшествующих моменту времени t, на значение величины y(t) зависит от
характера импульсной переходной функции w(t-t). Из рисунка 2.14, б, например, видно, что импульс x(t)dt проявляет себя в момент времени t более существенно, если
импульсная переходная функция имеет вид w2(t-t). Если же эта функция имеет вид w1(t-t), то влияние импульса будет
проявляться слабее. Следовательно, импульсная переходная функция как бы
"взвешивает" роль каждого импульса, приложенного к системе в момент
времени t=t, в образовании
реакции системы в рассматриваемый момент времени. По этой причине часто
импульсную переходную функцию называют также весовой функцией.
В дискретной форме выражение (2.7) можно представить в
следующем виде
 (2.8)
(2.8)
Рассмотрим
конкретный пример с использованием в качестве входного воздействия
положительной полуволны синусоиды с единичной амплитудой и частотой 314,16
рад/сек. В качестве объекта управления используем апериодическое звено второго
порядка с известными параметрами (рисунок 2.15).
Величина ∆t принимается равной 0,0005 с. Таким
образом, каждый последующий импульс с выхода сумматора S смещен относительно
предыдущего на величину 0,0005 с, что достигается настройкой параметров двух
блоков Step. В системе Simulink структура, имитирующая элемент w(t - k∆τ)x(k∆τ), представлена на рисунок 2.15.
На следующем рисунке (рисунок 2.16) представлена
модель всего процесса свертки функций. Весь процесс моделирования занимает
время tМ = 0,01 с и количество отсчетов можно рассчитать по формуле
= tM /∆t = 20 (2.9)
Подсистема Subsystem на рисунке 2.16 включает в себя
двадцать элементов, представленных на рисунке 2.15. Выходы этих элементов
складываются в сумматоре ∑, затем умножаются на период дискретности ∆t,
после чего поступают на осциллограф Scope. На этот же осциллограф записывается
также непосредственная реакция звена на входной сигнал и сам входной сигнал
типа полуволны. Графики этих сигналов представлены соответственно на рисунке
2.17 а, б и в. Анализируя полученные осциллограммы, можно отметить, что график
суммарной реакций на отдельные импульсы (рисунок 2.17, а) представляет собой
волнистую кривую, которая при уменьшении периода дискретности ∆t (или при
увеличении количества отсчетов) должна теоретически стремиться к кривой рис.
2.17, б).
2.4 Модель релейной системы регулирования
При качественном рассмотрении процессов в нелинейных
автоматических системах удобно использовать геометрическое представление,
основанное на понятии фазового пространства. Фазовое пространство - это
пространство в прямоугольной системе координат Хi которыми являются величины,
определяющие состояние системы. В общем случае у системы п-го порядка таких
координат будет п. Ими могут быть, например, выходная величина системы и ее
(n-1) производных, п выходных величин отдельных звеньев системы или других
связанных с ними переменных, которые в совокупности полностью определяют
состояние системы. Для системы второго порядка фазовое пространство двухмерное,
т. е. представляет собой фазовую плоскость, а для систем третьего порядка
фазовое пространство представляет собой трехмерное геометрическое пространство.
При более высоком порядке п это соответственно n-мерное пространство.
Состоянию системы в каждый момент времени,
определяемому значениями ее п координат, соответствует определенная точка
фазового пространства. Эта точка называется изображающей точкой. При изменении
состояния системы изображающая точка будет перемещаться, описывая траекторию,
которая называется фазовой траекторией. Фазовая траектория дает полное
представление о характере процесса в системе, кроме его временной оценки,
поскольку время здесь из рассмотрения исключено.
Если в качестве координат взять отклонения xi = Xi -
Xiуст величин Xi от их значений Xiуст, соответствующих некоторому
установившемуся режиму системы, то этому режиму будет соответствовать равенство
нулю всех xi, т.е. начало координат фазового пространства. В этом случае для
оценки устойчивости системы надо знать, как при t → ∞ перемещается
изображающая точка относительно начала координат. Для линейных систем в случае
устойчивой системы все фазовые траектории асимптотически стягиваются в начало
координат, а в случае неустойчивой - уходят в бесконечность.
Ниже рассматривается релейная система с обратной отрицательной связью.
Simulink-модель такой системы представлена на рисунке 2.18.
Данная система включает в себя инерционное звено первого порядка с
коэффициентом усиления k = 10 и постоянной времени T = 0,2 и последовательно
соединенное с ним интегрирующее звено. На входе инерционного звена установлен
релейный элемент с зоной нечувствительности 2b. Статическая характеристика
релейного элемента (рисунок 2.19) формируется блоками Relay1 и Relay2. На вход
системы поступает единичные ступенчатое воздействие. Реакцией инерционного
звена на это воздействие является переходная характеристика dy/dt, которая
отображается на экране виртуального осциллографа Scope 1. Одновременно на
экране осциллографа записывается сигнал y с выхода интегратора (Integrator).
Очевидно, что сигнал на входе интегратора является производной по времени от
производной от сигнала y на его входе. Зависимость производной от первообразной
функции или фазовая траектория, что одно и тоже, записывается на экране
виртуального графопостроителя XY Graph. Эта фазовая траектория является
графическим представлением уравнения состояния рассматриваемой модели.
Результаты моделирования представлены на рисунках 2.20 и 2.21.
Исходные данные: k = 10, T = 0,2, 2b = 0,02.
Анализ полученных графиков показывает, что система устойчива. Переходный
процесс имеет сходящийся характер и стремится к линии y =0,9.
Изменим исходные данные: k = 100, T = 0,02, 2b = 0,2. Результаты нового
моделирования представлены на рисунках 2.22 и 2.23.
Анализ результатов моделирования (рисунки 2.22 и 2.23) системы при
увеличении коэффициента усиления инерционного звена до 100 секунд одновременным
уменьшением зоны нечувствительности до 0,02 показывает, что в этом случае в
системе возникают устойчивые колебательные процессы. Предельный цикл имеет
параметры: амплитуда выходной величины yA = 0,16, амплитуда производной dy/dt =
18.
Оценивая рисунки 2.21 и 2.22, можно сделать заключение, что фазовый
портрет, как геометрическая интерпретация уравнения состояния, дает полное
представление о динамике нелинейной системы порядка не выше второго при
детерминированных воздействиях, включая точность, устойчивость и качество
переходного процесса.
2.5 Моделирования элементов ЭКГ при патологии
Имитационное моделирование ЭКГ-сигналов относится к одному из направлений
анализа электрокардиологической информации, которое занимается созданием
автоматизированных адаптивных ЭКГ-комплексов.
Наиболее приемлемым, в этом случае, является метод с подстраиваемой
моделью, который основывается на том, что параметры моделируемых зубцов
электрокардиологического сигнала подстраиваются под признаки реального ЭКС, при
этом в качестве таких моделей используются линейные звенья с переменной
структурой. Затем на основе параметров линейных звеньев (постоянные времени и
коэффициенты усиления) составляется база признаков патологий, которая является
основой при составлении диагностического заключения.
В качестве примера рассматривается моделирование отдельного элемента ЭКГ
- зубца Р (рисунок 2.24).
Зубец Р является достаточно информативным характерным элементом ЭКГ, т.к.
отражает распространение электрического импульса по обоим предсердиям.
Активность правого предсердия показывает начальная стадия зубца, а конечная его
часть представляет электрический потенциал, генерируемый левым предсердием.
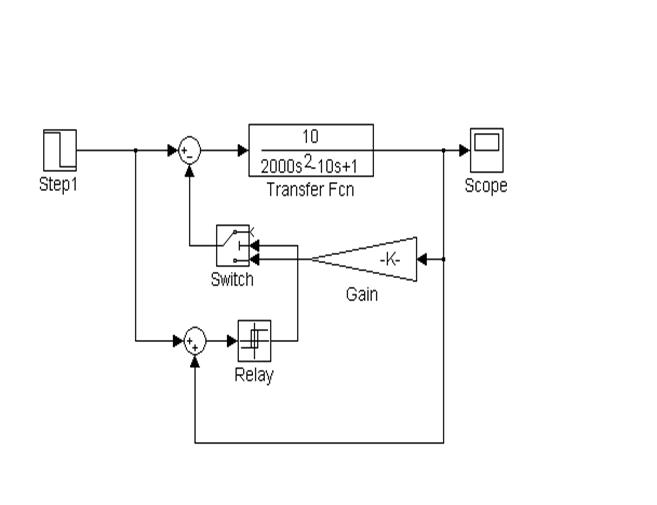
Модель зубца Р, выполненная с помощью пакета расширения Simmulink системы
MatLab, представлена на рисунке 2.25 в виде переменной структуры.
Модель способна отражать небольшие отклонения зубца Р от нормы. Принцип
работы системы заключается в следующем: на вход инерционного звена второго
порядка (Transfer Fcn) подается единичный импульс (Step 1). В результате на
выходе звена с помощью осциллографа (Scope) фиксируется переходная характеристика
в виде затухающего колебательного процесса.
Зубец Р по своим морфологическим признакам во многом схож с первым
полупериодом, полученной переходной характеристики. Для ограничения переходного
процесса только первым полупериодом в систему необходимо ввести жесткую
обратную связь с высоким коэффициентом усиления (Gain), которая должна
подключаться в момент окончания первой полуволны и тем самым устранять
колебательность переходного процесса, приводя к нулю. Обоснование выбора
коэффициента усиления (Gain) рассматривается в [4].
Передаточная функция полученной системы W(s) соответствует инерционному
звену Wи.з., охваченного отрицательной обратной связью Wо.с.
 . (2.10)
. (2.10)
Выражение
для передаточной функции инерционного звена следующее
.
 . (2.11)
. (2.11)
В
примере на рисунке 2.25 коэффициент усиления k равен 10, постоянные времени Т1
=2000, Т2=10, s - оператор Лапласа.
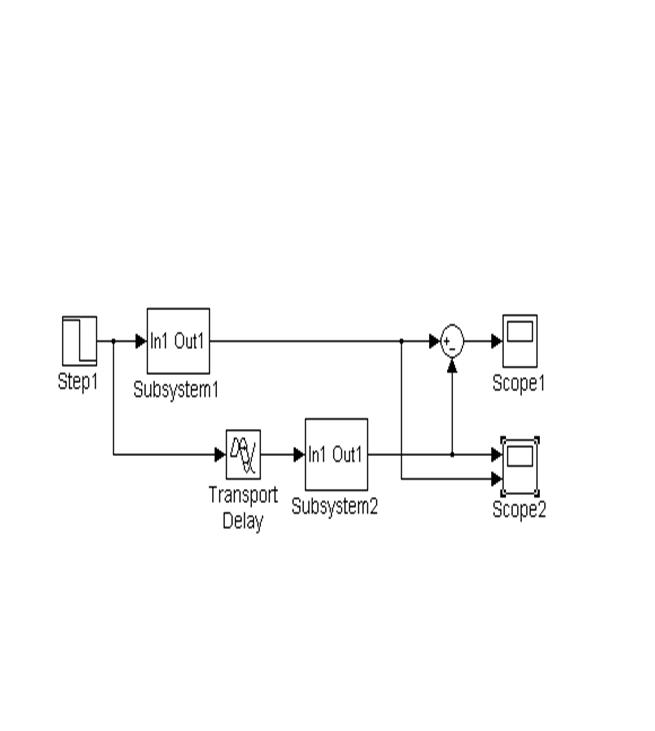
При патологии возможны различные формы зубца: расщепление, высокая
амплитуда, заострение зубца, изменение полярности и т.д. На рисунке 2.25
показана S-модель нормального P-зубца, для получения патологического зубца Р
одной полярности с расщеплением необходимо составить схему, состоящую из двух
одинаковых подсистем, имеющих структуру аналогичную S-модели нормального
P-зубца и подключенных определенным образом. На рисунке 2.26 представлена такая
комбинированная система. Две подсистемы Subsystem 1 и Subsystem 2 одинаковые по
структуре, но различные по параметрам инерционного звена. Вторая подсистема
является источником формирования второй полуволны расщепленного зубца Р и
подключена к формирователю единичного импульса через блок фиксированной
задержки Transport Delay.
На рисунке 2.27 представлены графики, полученные на осциллографах Scope1
и Scope2.
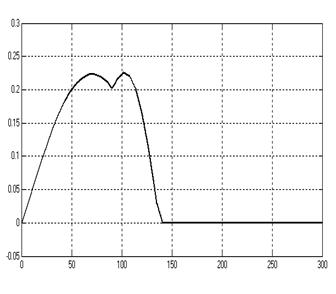
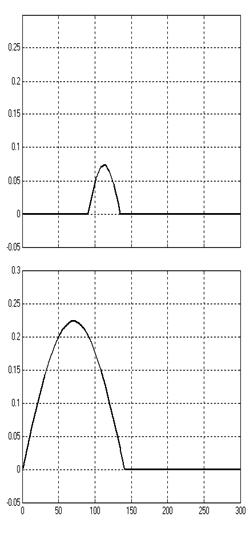
Рисунок 2.27, б представляет первую полуволну расщепленного зубца Р, а
рисунок 2.27, а вторую полуволну. На рисунке 2.27, в показан график, полученный
на осциллографе Scope1 и представляющий суммарный расщепленный зубец Р.
Передаточная функция WР (p) для системы на рисунке 2.26 находится из
следующего выражения
 . (2.12)
. (2.12)
где
W1(s), W2(s) - передаточные функции первой и второй подсистемы соответствуют
выражению (2.11), W3(s) - передаточная функция блока фиксированной задержки.
В
теории автоматического управления блок фиксированной задержки носит также
название звена с постоянным запаздыванием с передаточной функцией
 , (2.13)
, (2.13)
где
k - коэффициент усиления,
τ - время запаздывания.
Для
графиков на рисунке 2.20 справедливо следующее выражение
 . (2.14)
. (2.14)
Выражение
для передаточной функции системы синтеза зубца Р с расщеплением (2.13) получено
из (2.10), (2.12) и (2.13) подстановкой значений Т2=0, Т1=2000, k=10 (для
первой подсистемы); Т2=0, Т1=200, k=10 (для второй подсистемы); kЗ=1 и τ=90 и показывает, что в данном случае W1(s) и W2(s)
отличаются друг от друга значением постоянных времени Т1.
Метод подстраиваемой модели универсален, так как
позволяет использовать одну систему в качестве базовой. В данном случае такая
система изображена на рисунке 2.18. Включение в систему новых блоков дает
возможность изменять исследуемый элемент, в рассматриваемом примере - это зубец
Р. Кроме того, блоки, входящие в систему, имеют переменную структуру, т.е.
возможно устанавливать различные значения параметров этих блоков, регулируя
таким образом амплитуду и длительность моделируемого сигнала.
3. Надежность программного обеспечения
.1 Неконструктивность понятия правильной
программы
Под «программой» часто понимают правильную программу, т.е. программу, не
содержащую ошибок. Однако понятие ошибки в программе трактуется в среде
программистов неоднозначно. Согласно Майерсу [14] в программе имеется ошибка,
если она не выполняет того, что разумно ожидать от нее пользователю. «Разумное
ожидание» пользователя формируется на основании документации по применению этой
программы. Следовательно, понятие ошибки в программе является существенно не
формальным. В программных средствах (ПС) программы и документация взаимно
увязаны, образуют некоторую целостность. Поэтому правильнее говорить об ошибке
не в программе, а в ПС в целом: считается, что в ПС имеется ошибка, если оно не
выполняет того, что разумно ожидать от него пользователю. В частности,
разновидностью ошибки в ПС является несогласованность между программами ПС и
документацией по их применению. Выделяется в отдельное понятие частный случай
ошибки в ПС, когда программа не соответствует своей функциональной спецификации
(описанию, разрабатываемому на этапе, предшествующему непосредственному
программированию). Такая ошибка называется дефектом программы.
Так как задание на ПС обычно формулируется не формально, а также из-за
того, что понятия ошибки в ПС не формализовано, то нельзя доказать формальными
методами (математически) правильность ПС. Поэтому понятие правильной ПС
неконструктивно в том смысле, что после окончания работы над созданием ПС мы не
сможем убедиться, что достигли цели.
3.2 Надежность программного средства
Альтернативой правильного программного средства является надежное ПС.
Надежность ПС - это его
способность безотказно выполнять определенные функции при заданных условиях в
течение заданного периода времени с достаточно большой вероятностью. При этом под
отказом в ПС понимают проявление в нем ошибки. Таким образом, надежное ПС не
исключает наличия в нем ошибок - важно лишь, чтобы эти ошибки при практическом применении этого ПС в
заданных условиях проявлялись достаточно редко. Убедиться, что ПС обладает
таким свойством можно при его испытании путем тестирования, а также при
практическом применении. Таким образом, фактически возможно разрабатывать лишь
надежные, а не правильные ПС.
ПС может обладать различной степенью надежности. Как измерять эту
степень? Так же как в технике, степень надежности можно характеризовать
вероятностью работы ПС без отказа в течение определенного периода времени.
Однако в силу специфических особенностей ПС определение этой вероятности
наталкивается на ряд трудностей по сравнению с решением этой задачи в технике.
При оценке степени надежности ПС следует также учитывать последствия
каждого отказа. Некоторые ошибки в ПС могут вызывать лишь некоторые неудобства
при его применении, тогда как другие ошибки могут иметь катастрофические последствия,
например, угрожать человеческой жизни. Поэтому для оценки надежности ПС иногда
используют дополнительные показатели, учитывающие стоимость (вред) для
пользователя каждого отказа.
3.3 Количественное измерение надежности программы
Имеется несколько подходов к количественному измерению надежности [15].
Во-первых, можно рассчитать величину экономического риска, вызван-
ного возможностью ошибок в программе. По сути, этот риск определяется
разделами инструкции, устанавливающими использование результатов программы при
данном режиме эксплуатации, и вероятностями ошибок, влияющими на каждый тип
использования. Такой риск может быть основан только на прогнозе возможных
ошибок, что значительно снижает ценность подобного подхода. Во-вторых,
оцениваются реальные потери за период эксплуатации, вызванные ошибками. Если
определить тенденцию изменения реальных средних потерь за конкретный период
(например, за месяц или год), можно прогнозировать экономический риск на
будущее.
Существует также понятие статической надежности программы, измеряемой как
дополнительная вероятность обнаружения новой ошибки, не учтенной в предыдущих
коррекциях, при очередном обращении к программе. Простейшей оценкой
статистической надежности является величина
 (3.1)
(3.1)
или
 , (3.2)
, (3.2)
где n - количество выполненных обращений к программе;(n) - число
обнаруженных ошибок;(d,n) - доверительный интервал хи-квадрат оценки
вероятности ошибки f(n)/n при заданном уровне значимости.
В качестве оценки дисперсии d с гарантией можно пользоваться максимально
возможной дисперсией (равной 1/4) двоичной случайной величины (в соответствии с
двумя возможными исходами обращения к кортежу: удача = 0, ошибка = 1).
Недостатком такого подхода то, что не учитываются корректировки кортежа
после обнаружения каждой новой ошибки. Ситуация исправляется, если учитывать
только новые ошибки, не компенсируемые ранее сделанными корректировками
инструкции.
Более сложной, но иногда оправданной оценкой статистической надежности
может служить байесовская оценка вероятности верного срабатывания кортежа при
задании некоторой экспертной оценки априорной вероятности ошибки и
использовании статистической выборки отказов при обращениях к программе. Этот
метод результативен, если есть основания для прогноза частоты ошибок в исходном
кортеже. Теоретически использование обеих оценок не вполне корректно, так как
процесс, включающий коррекцию кортежа по каждой ошибке, не стационарен, а это
предполагается в обосновании методов оценки вероятности.
Можно также выделить не вполне конструктивный, но логически безупречный
подход к определению комбинаторной надежности программы, определяемой как
отношение числа вариантов исходных данных, на которых программа срабатывает
верно, к общему числу вариантов исходных данных. В условиях динамической
корректировки кортежа эта надежность постоянно растет. Однако оценить ее можно
только статистически, используя формулы, приведенные выше, для обработанной
статистической выборки результатов обращений к программе, из которой выброшены
повторные варианты исходных данных. В общем случае возникает та же трудность с
потерей стационарности процесса при корректировках. За исключением
статистической оценки комбинаторной надежности, полученной на основе многократного
тестирования программы, работающей безошибочно на всей серии тестовых
обращений. Это соответствует стадии тестирования программы в процессе отладки,
когда каждая обнаруженная ошибка исправляется на уровне программы или
инструкции, а потом тестирование начинается заново по полной программе. В этом
случае на каждом прогоне тестов корректировок не возникает, и процесс
возникновения ошибки остается стационарным. Оценка хи-квадрат тогда дает Р(n)
> 1 - e(1/4,n). Более точная оценка может быть основана на знании внутренней
структуры программы.
Нестабильность работы программы измеряется числом зарегистрированных
ошибок за определенный период эксплуатации, т. е. числом внесенных в инструкцию
корректировок за этот срок. В период устойчивой работы оборудования количество
внесенных корректировок f можно оценить численным интегралом по времени от
нестабильности D(i), измеренной на последовательных интервалах времени
длительности h(i)
 . (3.3)
. (3.3)
Поскольку технического износа у программы, инструкции и режима
эксплуатации нет, то до наступления износа компьютера нестабильность монотонно
падает за счет корректировок. По мере износа компьютера (старение технической
части среды) возникают специальные корректировки для обхода машинных сбоев и
поломок: нестабильность начинает расти. При нормальном режиме эксплуатации
предусматривается своевременная замена оборудования, и рост нестабильности
ограничен введением предосторожностей на период освоения новых приборных
средств.
3.4 Обеспечение надежности разработки
программных средств
Рассмотрим общие принципы обеспечения надежности ПС, что является
основным мотивом разработки ПС, задающим специфическую окраску всем
технологическим процессам разработки ПС. В технике известны четыре подхода
обеспечению надежности:
- предупреждение ошибок;
- самообнаружение ошибок;
- самоисправление ошибок;
- обеспечение устойчивости к ошибкам.
Целью подхода предупреждения ошибок - не допустить ошибок в готовых
продуктах, в нашем случае - в ПС. Проведенное рассмотрение природы ошибок при
разработке ПС позволяет для достижения этой цели сконцентрировать внимание на
следующих вопросах:
- борьбе со сложностью;
- обеспечении точности перевода;
- обеспечения контроля принимаемых решений;
- преодоления барьера между пользователем и разработчиком.
Этот подход связан с организацией процессов разработки ПС, т.е. с
технологией программирования. И хотя, гарантировать отсутствие ошибок в ПС
невозможно, но в рамках этого подхода можно достигнуть приемлемого уровня
надежности ПС.
Остальные три подхода связаны с организацией самих продуктов технологии,
в нашем случае - программ. Они учитывают возможность ошибки в программах.
Самообнаружение ошибки в программе означает, что программа содержит средства
обнаружения отказа в процессе ее выполнения. Самоисправление ошибки в программе
означает не только обнаружение отказа в процессе ее выполнения, но и
исправление последствий этого отказа, для чего в программе должны иметься
соответствующие средства. Обеспечение устойчивости программы к ошибкам
означает, что в программе содержатся средства, позволяющие локализовать область
влияния отказа программы, либо уменьшить его неприятные последствия, а иногда
предотвратить катастрофические последствия отказа. Однако, эти подходы
используются весьма редко (может быть, относительно чаще используется
обеспечение устойчивости к ошибкам). Связано это, во-первых, с тем, что многие
простые методы, используемые в технике в рамках этих подходов, неприменимы в
программировании,
например, дублирование отдельных блоков и устройств (выполнение двух
копий одной и той же программы всегда будет приводить к одинаковому эффекту -
правильному или неправильному). А, во-вторых, добавление в программу
дополнительных средств приводит к ее усложнению (иногда - значительному), что в
какой-то мере мешает методам предупреждения ошибок.
3.5 Методы борьбы со сложностью
Известны два общих метода борьбы со сложностью систем: первый метод
заключается в обеспечении независимости компонент системы, а второй
использование в системах иерархических структур.
Обеспечение независимости компонент означает разбиение системы на такие
части, между которыми должны остаться по возможности меньше связей. Одним из
воплощений этого метода является модульное программирование. Использование иерархических
структур позволяет локализовать связи между компонентами, допуская их лишь
между компонентами, принадлежащими смежным уровням иерархии. Этот метод, по
существу, означает разбиение большой системы на подсистемы, образующих малую
систему. Здесь существенно используется способность человека к абстрагированию.
3.6 Обеспечение точности перевода
Обеспечение точности перевода направлено на достижение однозначности
интерпретации документов различными разработчиками, а также пользователями ПС.
Это требует придерживаться при переводе определенной дисциплины. Весь процесс
перевода можно разбить на следующие этапы:
- понимание задача;
- составления плана (включая цели и методы решения);
- выполнение плана (проверка правильности каждого шага);
- анализ полученного решения.
3.7 Преодоление барьера между пользователем и разработчиком
Как обеспечить, чтобы ПС выполняла то, что пользователю разумно ожидать
от нее? Для этого необходимо правильно понять, во-первых, чего хочет
пользователь, и, во-вторых, его уровень подготовки и окружающую его обстановку.
Поэтому следует - привлекать пользователя в процессы принятия решений при
разработке ПС, - тщательно освоить особенности его работы.
3.8 Контроль принимаемых решений
Обязательным шагом в каждом процессе (этапе) разработки ПС должна быть
проверка правильности принятых решений. Это позволит обнаруживать и исправлять
ошибки на самой ранней стадии после ее возникновения, что, во-первых,
существенно снижает стоимость ее исправления и, во-вторых, повышает вероятность
правильного ее устранения.
С учетом специфики разработки ПС необходимо применять везде, где это
возможно: смежный контроль; сочетание как статических, так и динамических
методов контроля.
Смежный контроль означает, проверку полученного документа лицами, не участвующими
в его разработке, с двух сторон: во-первых, со стороны автора исходного для
контролируемого процесса документа, и, во-вторых, лицами, которые будут
использовать полученный документ в качестве исходного в последующих
технологических процессах. Такой контроль позволяет обеспечивать однозначность
интерпретации полученного документа.
Сочетание статических и динамических методов контроля означает, что нужно
не только контролировать документ как таковой, но и проверять, какой процесс
обработки данных он описывает. Это отражает одну из специфических особенность
ПС (статическая форма, динамическое содержание).
3.9 Тестирование
Важным этапом жизненного цикла программного обеспечения, определяющим
качество и надёжность системы, является тестирование. Тестирование - процесс
выполнения программ с намерением найти ошибки [16]. Этапы тестирования:
Автономное тестирование, контроль отдельного программного модуля отдельно
от других модулей системы.
Тестирование функций, контроль выполнения системой автоматизируемых
функций.
Комплексное тестирование, проверка соответствия системы требованиям
пользователей.
Тестирование полноты и корректности документации, выполнение программы в
строгом соответствии с инструкциями.
Тестирование конфигураций, проверка каждого конкретного варианта поставки
(установки) системы.
Существуют две стратегии при проектировании тестов: тестирование по
отношению к спецификациям (документации), не заботясь о тексте программы, и
тестирование по отношению к тексту программы, не заботясь о спецификациях.
Разумный компромисс лежит где-то посередине, смещаясь в ту или иную сторону в
зависимости от функций, выполняемых конкретным модулем, комплексом или
подсистемой.
Качество подготовки исходных данных для проведения тестирования серьёзно
влияет на эффективность процесса в целом и включает в себя:
- техническое задание;
- описание системы;
- руководство пользователя;
- исходный текст;
- правила построения (стандарты) программ и интерфейсов;
- критерии качества тестирования;
- эталонные значения исходных и результирующих данных;
- выделенные ресурсы, определяемые доступными финансовыми средствами.
Однако, исчерпывающее тестирование всех веток алгоритма любой серьёзной
программы для всех вариантов входных данных практически неосуществимо.
Следовательно, продолжительность этапа тестирования является вопросом чисто
экономическим. Учитывая, что реальные ресурсы любого проекта ограничены бюджетом
и графиком, можно утверждать, что искусство тестирования заключается в отборе
тестов с максимальной отдачей.
Ошибки в программах и данных могут проявиться на любой стадии
тестирования, а также в период эксплуатации системы. Зарегистрированные и
обработанные сведения должны использоваться для выявления отклонений от
требований заказчика или технического задания. Для решения этой задачи
используется система конфигурационного управления версиями программных
компонент, база документирования тестов, результатов тестирования и выполненных
корректировок программ. Средства накопления сообщений об отказах, ошибках,
предложениях на изменения, выполненных корректировках и характеристиках версий
являются основной для управления развитием и сопровождением комплекса программного
обеспечения (ПО) и состоят из журналов:
- предлагаемых изменений;
- найденных дефектов;
- утвержденных корректировок;
- реализованных изменений;
- пользовательских версий.
4. Определение цены программного продукта
Необходимо рассчитать стоимость разработки модели системы идентификации
отдельного элемента ЭКС. Эта модель относится к классу математических, так как
реальное воплощение физических свойств оригинала заменяется программной
реализацией модели. И, как любой программный продукт, представляет собой весьма
специфический товар с множеством присущих им особенностей. Многие их
особенности проявляются и в методах сложности расчетов цены на них. На
разработку программного продукта средней сложности обычно требуется весьма
незначительные средства. Однако, при этом он может дать экономический эффект,
значительно превышающий эффект от использования достаточно дорогостоящих
систем, в данном случае физической модели.
Следует подчеркнуть, что у программных продуктов практически отсутствует
процесс физического старения и износа. Для них основные затраты приходятся на
разработку образца, тогда как процесс тиражирования представляет собой, обычно,
сравнительно недорогую и несложную процедуру копирования магнитных носителей и
сопровождающей документации. Таким образом, этот товар не обладает, по сути,
рыночной стоимостью, формируемой на базе общественно необходимых затрат труда.
Величину затрат на разработку программного продукта произведем на основе
метода калькуляций. В этом случае себестоимость (затраты на создание)
программного продукта Зспп определяются расчетом по отдельным статьям расходов
и их последующим суммированием
Зспп = Зозп + Здзп +Змат +Змв + Знр, (4.1)
где Зозп - основная заработная плата разработчикам;
Здзп - дополнительная заработная плата разработчикам;
Змат - затраты на материалы, покупные изделия, полуфабрикаты;
Змв - затраты на оплату машинного времени;
Знр - накладные расходы.
Рассмотрим затраты по отдельным статьям расходов.
4.1 Расчет основной заработной платы
К этой статье относятся заработанная плата разработчиков, а также премии,
входящие в фонд заработной платы. Расчет основной заработной платы выполняется
при основе трудоемкости выполнения каждого этапа разработки в человеко-часах и
величины месячного должностного исполнителя.
Трудоемкость каждого этапа определяется для группы специалистов,
отвечающих за этот этап разработки.
Трудоемкость разработки программного продукта может включать в себя:
to - затраты труда на подготовку описания задачи;
tб - затраты труда на разработку блок-схемы алгоритма решения задачи;
tп - затраты труда на составление программы по готовой блок-схеме;
tд - затраты труда на подготовку документации задачи;
toт - затраты труда на отладку программы на ЭВМ при комплексной отладке
задачи.
Составление трудоемкости, в свою очередь, вычислим через условное число
операторов Q.
Оценить затраты труда на подготовку описания задачи to невозможно, т.к.
это связано с творческим характером работы, вместо этого оценим затраты труда
на изучение tи описания задачи с учетом уточнения описания и квалификации
программиста определяются из выражения
и = Q∙В/(75…85∙К), (4.2)
где В - увеличения затрат труда вследствие недостаточного описания
задачи, уточнений и некоторой недоработки, В=1,2…5;
К - коэффициент квалификации разработчика, для работающих до двух лет
К=0,8.
Таким образом затраты труда на изучение описания задачи составяти = 2∙4/75=0,107.
Затраты труда на разработку блок-схем алгоритма tб решения задачи
определяем из выражения
б = Q/(40…50∙К), (4.3)
б = 2/40=0,05.
Затраты труда на отладку программы на ЭВМ toт, при комплексной отладке
задачи
т =1,5∙t А oт , (4.4)
где t А oт - затраты труда на отладку программы на ЭВМ при автономной
отладке одной задачи.
Значение t А oт определяем из выражения
А oт = Q/(30…40∙К). (4.5)
А oт = 2/30=0,0067.
Подставив полученное значение в (4.4), определим затраты труда на отладку
программы на ЭВМт =1,5∙0,0067=0,1.
Затраты труда на подготовку документации по задаче tд определяются из
выражения
tд = tдр + tдр, (4.6)
где tдр - затраты труда на подготовку материалов в рукописи;до- затраты
труда на редактирование, печать и оформление документации.
Затраты tдр определим из выражения
др = Q/(150…200∙К), (4.7)
др = 2/150=0,0133.
Затраты tдо определим из выражения
до = 0,75∙ tдр, (4.8)
до = 0,75∙ 0,0133=0,01.
Подставив (4.7) и (4.8) в (4.6), рассчитаем затраты труда на подготовку
документации по задачед = 0,0133 + 0,01=0,0233.
Произведение трудоемкости на сумму часовой заработной платы определяет
затраты по зарплате для каждого работника на все время разработки.
Расчет основной заработной платы приведен в таблице 4.1.
Таблица 4.1 - Расчет основной заработной платы
|
Наименование этапов работы
|
Исполнитель
|
Мес. оклад, тг.
|
Часовая з/п, тг
|
Трудоемкость (чел/час)
|
Затраты по з/п
|
|
Подготовка описания задачи,
проведение теоретического анализа и оформление документов
|
Инженер
|
35000
|
200
|
88
|
17600
|
|
Разработка и отладка блоков
модели
|
Программист
|
35000
|
200
|
88
|
17600
|
|
Итого: Зозп = 35200 тг.
|
4.2 Расчет дополнительной заработной платы
К этой статье относятся выплаты, предусмотренные законодательством о
труде за неотработанное по уважительной причинам время: оплата очередных и
дополнительных отпусков и т.п. (принимается в размере 20% от суммы основной
заработной платы).
Здзп =0,2∙35200=7040 тг.
Фонд заработной платы соответственно составляет
ФЗПп=Зозп+Здзп. (4.9)
ФЗПп=35200+7040=42240 тг.
4.3 Расчет затрат на материалы, покупные
изделия, полуфабрикаты
К этой статье относиться стоимость материалов, покупных изделий,
полуфабрикатов и других материальных ценностей, расходуемых непосредственно в
процессе разработки программного обеспечения. В стоимость материальных затрат
включаются транспортные расходы (10% от прейскурантной цены).
Расчет статьи «материалы, покупные изделия, полуфабрикаты» приводится в
таблице 4.2.
Таблица 4.2 - Материалы, покупные изделия, полуфабрикаты
|
Наименование товара
|
Единицы измерения
|
Количество
|
Цена за единицу, тг.
|
Суммарные затраты, тг.
|
|
CD-R
|
шт.
|
1
|
160
|
160
|
|
Бумага для печати
|
лист
|
100
|
2
|
200
|
|
Итого: 360 тг.
|
|
Транспортные расходы 36 тг.
Итого с учетом транспортных расходов Змат = 396 тг.
|
4.4 Затраты на оплату машинного времени
Данные затраты определяются путем умножения фактического времени отладки
программы на tэвм на цену машино-часа арендного времени Счас
Змвспп= Счас∙ tэвм. (4.10)
Фактически время отладки вычисляется по формуле
эвм = tп+ tд +tот. (4.11)
Подставим найденные раннее значения затрат на составление программы, на
ее отладку, на подготовку документов в (4.11)эвм = 0,04+ 0,0233 +0,1 =0,1633.
Цену часа работы машины определим из выражения
Счас= Зэвм/Тэвм, (4.12)
где Зэвм -полные затраты на эксплуатацию ЭВМ в течении года;
Тэвм - действительный годовой фонд времени ЭВМ в течении года, час/год.
Рассчитаем годовой фонд времени работы IBM-совместимого компьютера из
выражения
Тэвм= Тсм∙ (Nгод- Nпр)- Nнед∙ Тпрост, (4.13)
где Тсм - продолжительность смены, принимаем Тсм=8 часов;год - количество
дней в году Nгод =365 дней;пр - количество праздничных и выходных дней в году
Nпр =112 дней;нед количество недель в году Nнед =52;
Тсм - время простоя в профилактических работах определяется как
еженедельная профилактика по 4 часа.
Тэвм= 8(365-112)- 52∙4=1816 ч.
Полные затраты на эксплуатацию ЭВМ определяются по формуле
Зэвм = Зам + Зэл + Зтпр, (4.14)
где Зам - годовые издержки на амортизацию, тг/год;
Зэл - годовые издержки на электроэнергию, потребляемую компьютером,
тг/год;
Зтпр - затраты на текущий и профилактический компьютера, тг/год.
Сумму годовых амортизационных отчислений определяется по формуле
Зам =Сбал∙Нам, (4.15)
где Сбал - балансная стоимость компьютера, тг;
Нам - норма амортизации, принимаем 12,2 %.
Зам =45000∙0,122=5490 тг/год.
Балансовая стоимость ПЭВМ включает отпускную цену, расходы на
транспортировку, монтаж оборудования и его наладку.
Стоимость электроэнергии, потребляемой за год компьютером, определяется
по формуле
Зэл = Рэл∙Тэвм∙Сэл, (4.16)
где Рэл - суммарная мощность ЭВМ, кВт;
Сэл - стосимость 1 кВт∙ч электроэнергии;
Зэл = 0,5∙1816∙5,16 =4685,28 тг.
Затраты на текущий и профилактический ремонт принимаются равными 5% от
стоимости ЭВМ
Зтпр = 0.05∙ 45000=2250 тг.
Таким образом полные затраты на эксплуатацию ЭВМ согласно формуле (4.14)
в течение года составят
Зэвм = 5490 + 4686 +2250 =12426 тг.
Тогда цена машино-часа арендуемого времени согласно (4.12) составит
Счас = 12426/ 1816=6,84 тг/час.
Затраты на оплату машинного времени составят
Змвспп= Счас∙ tэвм, (4.17)
Змвспп= 6,84 ∙ 0,1633 =1,12 тг.
4.5 Расчет накладных расходов
Накладные расходы - это расходы на освещение, отопление, коммунальные
услуги и т.п. Они принимаются равными одной трети основой зарплаты
разработчиков программы.
То есть накладные расходы составят 11733 тг.
4.6 Расчет себестоимости программного продукта
Калькуляция себестоимости разработки приведена в таблице 4.3.
Социальный налог составляет 20% от фонда заработной платы. Полная
себестоимость разработки определяется суммированием п.п. 1-6 таблицы 4.3.
Оптовая цена определяется как сумма себестоимости и прибыли. Прибыль составляет
30% от себестоимости. При расчете договорной цены в общую стоимость закладывается
сумма налога на добавленную стоимость, равного 14% от оптовой цены.
Таблица 4.3 - Статьи расходов на разработку программного продукта
|
№
|
Наименование статьи расхода
|
Затраты, тенге
|
|
1.
|
Материалы, покупные
изделия, полуфабрикаты
|
396
|
|
2.
|
Основная заработная плата
|
35200
|
|
3.
|
Дополнительная заработная
плата
|
7040
|
|
4.
|
Оплата машинного времени
|
1,12
|
|
5.
|
Социальный налог
|
8448
|
|
6.
|
Накладные расходы
|
11733
|
|
7.
|
Полная себестоимость
|
62818,12
|
|
8.
|
Прибыль
|
18845,436
|
|
9.
|
Оптовая цена
|
81663,6
|
|
10.
|
НДС
|
11432,8
|
5. Техника безопасности при работе с
компьютерным оборудованием
.1 Анализ опасных, вредных факторов и возможных
чрезвычайных ситуаций, возникающих при работе на компьютере
Дипломный проект посвящен вопросу моделирования и оптимизации линейных
систем в среде расширения MatLab. Выполнение этого проекта непосредственно
связано с работой на компьютере, в связи с этим возможно возникновение
следующих опасных и вредных факторов:
- повышенная запыленность рабочей зоны;
- повышенная температура воздуха рабочей зоны;
- повышенная или пониженная влажность воздуха;
- повышенная или пониженная подвижность воздуха;
- недостаточная освещенность рабочей зоны;
- прямая и отраженная блесткость;
- повышенный уровень шума на рабочем месте;
- повышенный уровень статического электричества;
- повышенный уровень электромагнитных излучений;
- повышенный уровень ультрафиолетовых излучений;
- повышенный уровень рентгеновского излучения;
- повышенное значение напряжения в электрической цепи, замыкание которой
может пройти через тело человека;
- повышенная пожароопасность;
- компьютерные вирусы.
Один из факторов воздействия внешней среды являются микроклиматические
условия.
Для помещений с ПК учитываются сезон года и тяжесть выполняемой работы
(легкая, 1а). Для данного типа работ установлены оптимальные параметры,
приведенные в таблице 5.1 [18].
Правильно спроектированное и выполненное освещение на предприятиях
машиностроительной промышленности обеспечивает возможность нормальной
производственной деятельности. При освещении производственных помещений
используют естественное и искусственное освещение. Недостаток естественного
света предусматривает применение системы смешанного освещения.
Таблица 5.1 -
Оптимальные нормы микроклимата для помещений с ПК учебно-воспитательных
учреждений
|
Период года
|
Теплый
|
Холодный
|
|
Температура воздуха, С0
|
22 - 24
|
21 - 23
|
|
Относительная влажность, %
|
40 - 60
|
40 - 60
|
|
Скорость движения воздуха,
м/с, не более
|
0,2
|
0,1
|
При работе за дисплеем освещенность определяется минимальным объектом
различения - шириной линии рукописного или печатного текста, который читает
программист с листа. Для данного вида работы нормируемая общая освещенность
составляет 400 люкс.
Недостаточное освещение приводит к напряжению зрения, преждевременной
усталости и ослабляет внимание. Чрезмерно яркое освещение вызывает ослепление,
раздражение и резь в глазах. Неправильное направление света на рабочее место
может создать резкие тени, блики и дезориентировать работающего. Это может
привести к профессиональным заболеваниям.
Сохранность зрения человека, состояние его центральной нервной системы и
безопасность на производстве в значительной мере зависят от условий освещения.
В помещениях ВЦ применяется, как правило, боковое естественное освещение
с коэффициентом Ке.о. = 1%.
Для общего освещения помещения ВЦ используются люминесцентные лампы.
Их достоинство:
высокая световая отдача (до 75 лм/вт и более);
продолжительный срок службы (до 10000 часов);
малая яркость светящейся поверхности;
спектральный состав излучаемого света.
Одним из недостатков таких ламп является высокая пульсация светового
потока, вызывающая утомление зрения. По этому коэффициент пульсации
освещенности регламентирован в пределах 10 - 20 % в зависимости от разряда
зрительной работы.
Таблица 5.2 - Нормы освещенности в помещениях с ПЭВМ для учебных
заведений
|
Характеристика работы
|
Работа с экранами ПЭВМ
|
|
Рабочая поверхность
|
экран
|
клавиатура
|
стол
|
классная доска
|
|
Плоскость
|
вертик.
|
горизонт.
|
горизонт.
|
вертик.
|
|
Освещение, лк
|
200
|
400
|
400
|
500
|
Одним из наиболее распространенных факторов внешней среды, неблагоприятно
воздействующих на организм человека, является шум.
Источником шума в машинном зале ВЦ являются механические устройства ЭВМ.
Человек, работая при шуме, привыкает к нему, но продолжительное действие
сильного шума вызывает общее утомление, может привести к ухудшению слуха, а
иногда и к глухоте, нарушается процесс пищеварения, происходит изменение объема
внутренних органов. Эти вредные последствия шума тем больше, чем сильнее шум и
продолжительнее его действие. Таким образом, шум на рабочем месте не должен
превышать допустимых уровней, значения которых приведены в ГОСТ 12.1.003-83. Во
всех учебных помещениях с ВТ и ПЭВМ фоновый уровень звука не должен превышать
40 дБА, а во время работы на ПЭВМ 50 дБА.
Также вредное влияние на зрение человека оказывает прямая и отраженная
блесткость, которая приводит к перенапряжению и усталости. Согласно яркость
светящихся поверхностей (окна, светильники и др.), находящиеся в поле зрения,
должна быть не более 200 кд/м2, а при отраженной блесткости яркость бликов на
экране ПЭВМ не должна превышать 40 кд/м2 и яркость потолка, при применении
системы отраженного освещения, не должна превышать 200 кд/м2.
Для предотвращения образования и защиты студентов от статического
электричества в помещениях - вычислительного центра необходимо использовать
нейтрализаторы и увлажнители воздуха, а полы должны иметь антистатическое
покрытие. Допустимый уровень напряженности электрического поля в помещениях УВЦ
не должен превышать 20 кВ/м.
Источником наиболее вредных излучений, неблагоприятно влияющих на
здоровье операторов, является монитор ПЭВМ с электронно-лучевой трубкой.
Систематическое воздействие электромагнитных полей (ЭМП), превышающих
допустимую величину может оказать неблагоприятное воздействие на человека, выражающееся
в функциональных нарушениях нервной, эндокринной и сердечно-сосудистой системы.
По результатам измерений ЭМП составляет 28-64 В/м в зависимости от модификации
монитора. Эти значения снижаются до 0,3-2,4 В/м на расстоянии 30 см от экрана.
Уровень электромагнитного поля в области частот 10 кГц-18кГц колеблется в
пределах от 1 до 5 Вт/м2,что в 20 раз ниже допустимой величины (100 Вт/м2), а
напряженность электрического поля составляет 0,01-1,8 кВ/м.
При исследованиях глазных заболеваний, связанных с изучением, выяснилось,
что служащие, работающие за дисплеем по семь и более часов в день, страдают
воспалениями и другими заболеваниями глаз на 70% чаще тех, кто проводит за
дисплеем меньше времени.
Технические характеристики дисплеев (разрешающая способность, яркость,
контрастность, частота кадровой развертки) в том случае, если на них не
обращают внимания при выборе устройства или неправильно устанавливают, могут
крайне отрицательно сказаться на зрении.
Поэтому для мониторов существуют следующие нормы:
- мощность экспозиционной дозы рентгеновского излучения в любой точке на
расстоянии 0,05 м от экрана и корпуса мониторов при любых положениях
регулировочных устройств не должна 0,1 мбэр/час.
- уровень ультрафиолетового излучения на рабочем месте пользователя в длинноволновой
области (400-315 нм) должен быть не более 10 Вт/м, в средневолновой области
(315-280 нм) не более 0,01 Вт/м2 и отсутствовать в коротковолновой области
(280-200 нм);
- напряженность электромагнитного поля на рабочем месте пользователя по
электрической составляющей должна быть не более 50 В/м и по магнитной
составляющей не более 5 А/м.
К опасным производственным факторам относятся: повышенное напряжение в
электрической сети и повышенная пожароопасность [19].
Персональный компьютер питается от сети напряжением 220В с частотой 50
Гц. Здесь используется трехфазная цепь с изолированной нейтралью.
В вычислительном центре при использовании ПЭВМ помещение, где установлен
ПК, относится ко второму классу - помещение с повышенной опасностью, из-за
опасности прикосновения человека, не изолированного от земли, к корпусу ПК,
оказавшемуся под напряжением.
Проходя через организм, электрический ток оказывает термическое,
электролитическое и биологическое действие. В результате могут возникнуть
различные нарушения и даже полное прекращение деятельности органов дыхания и
кровообращения. Величина тока, протекающего через тело человека, является
главным фактором, от которого зависит исход поражения: чем больше ток, тем
опаснее его действие. Пороговый ощутимый ток - 0,6-1,5 мА (50 Гц). Пороговый
неотпускающий ток - 10-15 мА (50 Гц) вызывает сильные и весьма болезненные
судороги мышц грудной клетки, что приводит к затруднению или даже прекращению
дыхания.
При 100 мА ток оказывает непосредственное влияние также и на мышцу
сердца, что в конечном результате приводит к смерти. Наиболее опасным является
переменный ток с частотой 20-100 Гц.
Исход воздействия тока зависит от ряда факторов, в том числе от значения
и длительности протекания через тело человека тока, рода и частоты тока и
индивидуальных свойств человека. Электрическое сопротивление тела человека и
приложенное к нему напряжение также влияет на исход поражения, но лишь
постольку, поскольку они определяют значение тока. Участок ПЭВМ по пожарной
опасности относится к категории пожароопасных "В".
Пожар на производстве может возникнуть вследствие причин неэлектрического
и электрического характера.
К причинам неэлектрического характера относятся:
- неисправность производственного оборудования и нарушение технологического
процесса;
- халатное и неосторожное обращение с огнем (курение, оставление без
присмотра нагревательных приборов);
- неправильное устройство и неисправность вентиляционной системы;
- самовоспламенение или самовозгорание веществ.
К причинам электрического характера относятся:
- короткое замыкание;
- перегрузка проводов;
- большое переходное сопротивление;
- искрение;
- статическое электричество.
К чрезвычайным ситуациям можно отнести появление компьютерных вирусов.
Они оказывают большое влияние на психологическую обстановку при работе с
программными продуктами и средствами вычислительной техники. Все действия
вируса могут выполняться достаточно быстро и без выдачи каких-либо сообщений,
поэтому пользователю очень трудно заметить, что в компьютере происходит что-то
необычное.
Компьютерный вирус - это специально написанная небольшая по размерам
программа, которая может "приписывать" себя к другим программам (то
есть "заражать их"), а также выполнять различные нежелательные
действия на компьютере. Программа, внутри которой находится вирус, называется
"зараженной". Когда такая программа начинает работу, то сначала
управление получает вирус. Вирус находит и "заражает" другие
программы, а также выполняет какие-нибудь вредные действия (например, портит
файлы или таблицу размещения файлов на диске, "засоряет" оперативную
память и т.д.).
5.2 Разработка мер безопасности
Для предотвращения повышенной запыленности рекомендуется устанавливать
пылеуловители, вытяжные устройства, а также проводить влажную уборку помещения
вычислительного центра, а перед началом и после каждого академического часа
учебных занятий, до и после каждого занятия проветривать помещение, что
обеспечит улучшение качественного состава воздуха.
В случае необходимости при повышенной температуре окружающего воздуха в
теплое время года необходимо установить, а при пониженной температуре
окружающего воздуха в холодное время года установить дополнительные
обогревательные приборы с учетом всех мер противопожарной безопасности
согласно.
Для повышения влажности воздуха в помещениях с ПЭВМ рекомендуется
применять увлажнители воздуха, которые будут заправляться ежедневно
дистиллированной или прокипяченной питьевой водой.
Для уменьшения уровня шума в помещении вычислительного центра можно
применять отделочные материалы с шумопоглощающим эффектом (шумопоглощающие
потолки и т. п.).
При недостатке естественного освещения необходимо будет пользоваться
искусственным. В качестве источников света при искусственном освещении
рекомендуется применять преимущественно люминесцентные лампы типа ЛБ.
Общее освещение выполняется в виде сплошных или прерывистых линий
светильников, расположенных сбоку от рабочих мест, преимущественно слева,
параллельно линии зрения пользователей. При периметральном расположении рабочих
мест с ПЭВМ, светильники общего освещения расположим локализовано относительно
рабочих мест.
Для решения проблемы облучения оператора ПЭВМ необходимо:
- использовать дисплеи с высокой разрешающей способностью (размер пиксела
0,28 (лучше 0,25)) и размером экрана не менее 14;
- установить видеоадаптеры с высоким разрешением и частотой кадровой
развертки не менее 70-72Гц;
- обязательно ставить на дисплеи экранные фильтры с антистатическим
покрытием, в несколько раз снижающие утомляемость глаз и концентрацию пылевых
частиц в близи экрана монитора;
сидеть не ближе 70 см от дисплея;
экран дисплея должен быть ориентирован таким образом, чтобы исключить
блики от источников света;
не следует располагать дисплей непосредственно под источником освещения
или вплотную с ним;
желательно, чтобы освещенность рабочего места оператора не превышала
2/3 нормальной освещенности помещения;
стена позади дисплея должна быть освещена примерно так же, как его
экран.
Далее приводятся рекомендации по организации рабочего места пользователя
ПЭВМ:
Рабочие места с ПЭВМ должны размещаться в помещениях с естественным
освещением при ориентации оконных проемов на север или северо-восток.
Оконные проемы в помещениях использования ПЭВМ должны быть оборудованы
регулируемыми жалюзями или занавесями, позволяющими полностью закрывать оконные
проемы.
Шкафы, сейфы, стеллажи для хранения дисков, дискет, комплектующих
деталей, запасных блоков ПЭВМ, инструментов, следует располагать в
лаборантских.
При конструировании оборудования и организации рабочего места пользователя
ПЭВМ следует обеспечить соответствие конструкции элементов рабочего стола и их
взаимного расположения, конструкции стула (кресла) гигиеническим и
эргономическим требованиям с учетом характера выполняемой деятельности,
комплексности технических средств, форм организации труда и основного рабочего
положения пользователя.
Конструкция рабочего стола должна обеспечивать оптимальное размещение на
рабочей поверхности используемого оборудования с учетом его количества и
конструктивных особенностей (размер ПЭВМ, клавиатуры, и др.), характера
выполняемой работы, а также возможность выполнения трудовых операций в пределах
досягаемости моторного поля.
Поверхности рабочих столов для расположения ПЭВМ должны легко и плавно
регулироваться по высоте с надежной фиксацией в заданном положении.
Конструкция рабочего стула (кресла) должна обеспечивать поддержание
рациональной рабочей позы при работе на ПЭВМ, позволять изменять позу с целью
снижения статического напряжения мышц шейно-плечевой области и спины для
предупреждения развития утомления.
Экран видеомониторов должен находиться от глаз пользователя на
оптимальном расстоянии 700 мм, но не ближе 500 мм.
Помещения для занятий с использованием ПЭВМ и в высших учебных заведениях
должны быть оборудованы одноместными столами, предназначенными для работы на
ПЭВМ.
Рабочие места с ПЭВМ должны располагаться по периметру помещения, вдоль
стен.
Пожарная безопасность может быть обеспечена мерами пожарной профилактики
и активной пожарной защитой. Понятие о пожарной профилактике включает комплекс
мероприятий, необходимых для предупреждения возникновения пожара или уменьшения
его последствий. Под активной пожарной защитой понимаются меры, обеспечивающие
успешную борьбу с возникающими пожарами или взрывоопасными ситуациями.
Профилактические методы борьбы с пожарами на участке ПЭВМ
предусматривают:
Организационные: правильное содержание помещений, противопожарный
инструктаж служащих, издание приказов по вопросам усиления пожарной
безопасности и т.д.
Технические: соблюдение противопожарных правил, норм при проектировании
помещений, при устройстве электропроводов и оборудования, отопления,
вентиляции, освещения.
Режимные: запрещение курения в неустановленных местах, производство
пожароопасных работ в помещении машинного зала ВЦ и т.д.
Эксплуатационные: своевременные профилактические осмотры, ремонты
оборудования.
Чрезвычайной ситуацией, возникающей при работе пользователя на
персональной ЭВМ можно и необходимо считать случай "заражения"
компьютерным вирусом. Когда вирус только попадает в компьютер, он не заметен.
Но через некоторое время, когда он "заразит" собой большое количество
программ, он может себя проявить: некоторые программы перестают работать или
работают некорректно, исчезают файлы, разрушается их структура, на экран могут
выводиться непонятные сообщения, работа компьютера может сильно замедлиться и
т.д.
Таким образом, если не предпринимать мер по защите от вируса, то
последствия заражения компьютера могут быть очень серьезными. Для защиты от
вирусов можно использовать:
общие средства защиты информации.
профилактические меры, позволяющие уменьшить вероятность заражения
вирусом (резидентные программы-фильтры, программы-ревизоры, создание архивных
копий, системных дискет и т.д.);
специализированные программы для защиты от вирусов (программы-детекторы,
программы вакцины, программы-доктора, программы-ревизоры, программы-фильтры и
т.п.).
Заключение
В процессе проектирования систем автоматического
управления моделирование является одним из основных инструментов. Так как
зачастую создание модели гораздо проще создания самого оригинала.
Математическая модель обеспечивает имитацию работы
систем или устройств на уровне, достаточно близком к их реальному поведению.
Создание модели связано с множеством вычислений и
расчетов, которые порой трудно выполнить вручную. Благодаря программным
средствам моделирования, появилась возможность автоматизировать некоторые
сложные этапы моделирования. В данной работе в качестве такого программного
средства выбрана программная система МатLab, а в качестве исследуемых моделей -
линейные системы. Для этих целей в системе МатLab используют пакет Control
System Toolbox и пакет Simulink.
В первом пункте основной части работы изучается группа
функций пакета Control System Toolbox, обеспечивающая получение информации об отдельных
характеристиках моделей различных звеньев САУ с помощью графического интерфейса
GUI. В частотности рассматривается одна из функций интерфейса, предназначенная
для открытия специального средства просмотра временных и частотных
характеристик линейных стационарных систем.
Во втором пункте временные и частотные характеристики уже реализуются в
среде визуального моделирования Simulink. И хотя процесс моделирования в среде
Simulink занимает больше времени, сама практика составления структурных схем
способствует лучшему пониманию теоретических основ САУ и подготавливает
пользователя к работе с более сложными моделями.
Далее рассматривается моделирование структуры, поясняющий
основополагающий принцип линейных систем - принцип суперпозиции. Принцип
суперпозиции позволяет выразить реакцию системы на любое произвольное
воздействие через реакцию системы на элементарное типовое воздействие. В работе
апериодическое звено является моделью, а дельта-функция - входным типовым
воздействием, которое представлено в виде совокупности воздействий. Полученные
осциллограммы позволяют увидеть принцип суперпозиции в действии.
Качество динамических процессов в системах автоматического управления
можно ценить не только с помощью переходных и частотных характеристик, но и с
помощью фазового пространства. Такой метод исследования описывается в третьем
пункте основной части дипломной работы. Для этого создается модель системы
автоматического регулирования релейного типа. При подаче единичного
ступенчатого воздействия на вход системы на экране графопостроителя
записывается сигнал представляющий собой фазовую траекторию. В работе
анализируется влияние параметров модели на точность, устойчивость и качество
переходного процесса.
Заключительный раздел основной части посвящен вопросу имитационного
моделирования ЭКГ-сигналов. В качестве наглядного примера представлена модель
релейной системы регулирования и идентификации структуры отдельного
характерного элемента ЭКС зубца Р в системе MatLab.
В разделе надежности программного обеспечения в целом определяется
специфика понятия отказа программы. Изучаются способы оценки надежности, а
также рассматриваются методы устранения ошибок и предотвращения сбоев.
В экономической части рассчитывается стоимость разработки программного
продукта. Для этого определяется сумма всех затрат, т.е. себестоимость
программного изделия (62818 тг.), а также прибыль, которую возможно получить с
разработки (18845 тг.). В итоге подсчетов цена программного продукта составила
81663,6 тенге.
Следующий раздел посвящен электробезопасности при работе с компьютером, в
котором дается анализ опасных, вредных факторов и возможных чрезвычайных
ситуаций, возникающих при работе на компьютере.
Список литературы
1. В.П. Дьяконов. MATLAB
6.0/6.1/6.5/6.5 + SP1 + Simulink 4/5. Обработка сигналов и изображений.
<#"787116.files/image004.gif">, (2.4)
где
значение постоянных времени T1 = 0,00000042 с, T2 = 0,002 с.
С
помощью этого интерфейса можно получить график переходной функции (рис. 2.3)
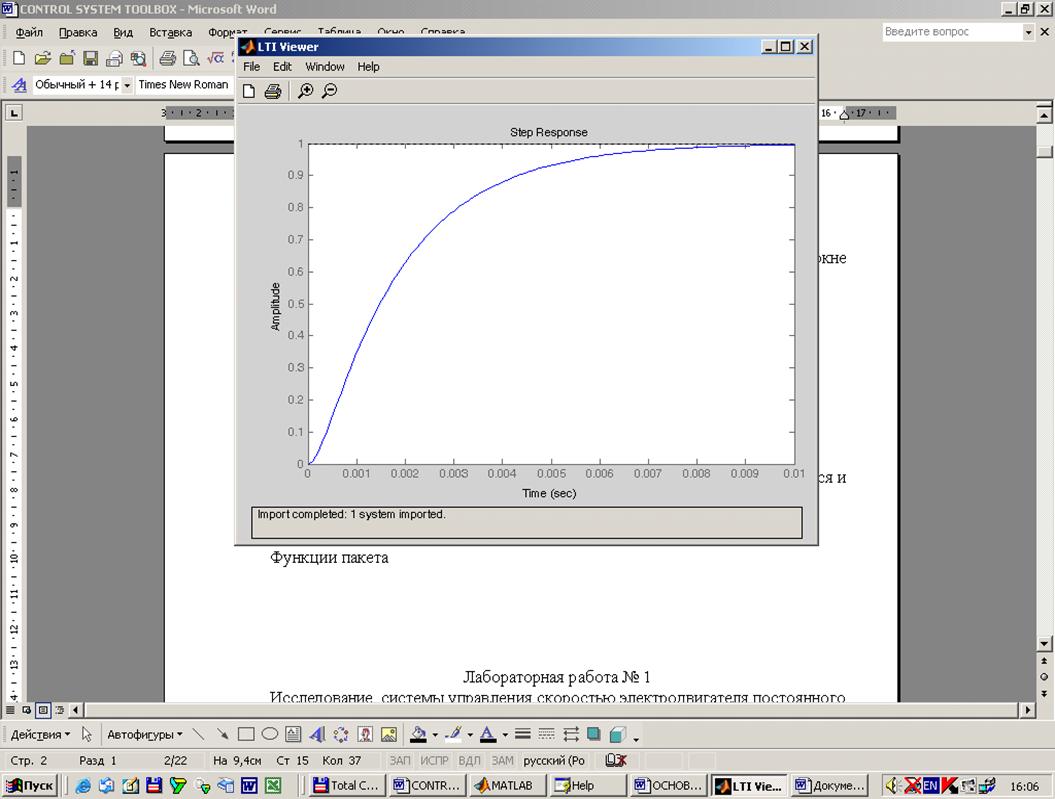
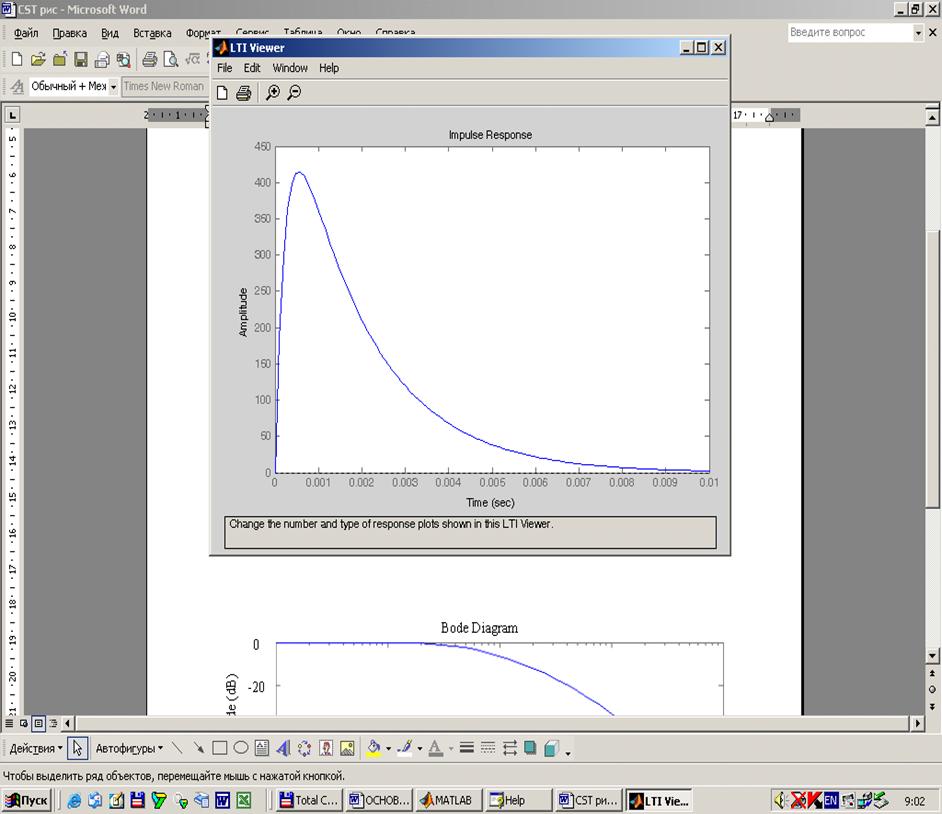
Такие же характеристики можно получить с помощью системы Simulink, только
в этом случае необходимо разработать структурные схемы и набрать их в матлабовском
формате с расширением .mdl.
Например, для получения переходной характеристики необходимо набрать
схему на рис. 2.7.
Необходимо запустить эту схему в системе MatLab. Далее по очереди
запустить все остальные схемы и прокомментировать.
Результаты моделирования системы (рис. 2.7) представлены на рис. 2.8.
Сравнивая рисунок 2.3 и рисунок 2.8, можно прийти к
заключению о практически полной идентичности результатов, полученных двумя
разными методами.
Моделирования весовой функции осуществляется с помощью той же модели
(рисунок 2.7), но входной сигнал в этом случае представляет собой
дельта-функцию.
Запустить процесс моделирования.
Запустим процесс моделирования. Сравнив полученные результаты (рисунок
2.9) с уже имеющимися (рисунок 2.5) убедимся, что разница визуально не
различима.
Несколько сложнее строится структура для получения
частотных характеристик. Один из вариантов модели для получения логарифмических
амплитудно-частотных характеристик (ЛАЧХ) представлен на рисунке 2.10.
Сложность заключается в том, что в этом случае необходимо моделировать
логарифмическую шкалу.
Запустим процесс моделирования.
Модель и результаты моделирования фазочастотной характеристики
представлены на рис. 2.12 и 2.13.
Также запустить процесс моделирования.
Представляет интерес моделирования структуры,
поясняющий основополагающий принцип линейных систем - принцип суперпозиции.
Основа этого принципа заключается в том, реакция системы на любую комбинацию
внешних воздействий равна сумме реакций на каждое из этих воздействий, поданных
на систему порознь. Принцип суперпозиции позволяет выразить реакцию системы на
любое произвольное воздействие через реакцию системы на элементарное типовое
воздействие, например, в виде дельта-функции (рисунок 2.14). Для этого
достаточно представить данное входное воздействие в виде совокупности выбранных
типовых воздействий.
Математическую формализацию этого принципа можно представить выражением
теоремы для свертки функций в вещественной области.
(2.7)
Не
вдаваясь в тонкости математической интерпретации принципа суперпозиции имеет
смысл представить результаты моделирования всего процесса свертки функций при
прохождении сигнала в виде полуволны (рис. 2.17, а) через инерционное звено
второго порядка. На рис. б представлена реакция звена на сигнал типа в, а на
рис. а реакция этого же звена на сумму последовательных импульсов.
Анализируя полученные осциллограммы, можно отметить, что график суммарной
реакций на отдельные импульсы (рисунок 2.17, а) представляет собой волнистую
кривую, которая при уменьшении периода дискретности ∆t (или при
увеличении количества отсчетов) должна теоретически стремиться к кривой рис.
2.17, б). В дипломной работе также раскрыты возможности Simulink при
моделировании таких процессов как электрокардиологический сигнал. В целом полученные
результаты предполагается использовать в дальнейшей учебной и научной работе
кафедры РиТ.